
 Физика
ФизикаПохожие презентации:







")


Статика и динамика систем автоматизированного управления. Лекция №2
1. Дисциплина «Автоматизация типовых технологических процессов»
Тема лекции №2«Статика и динамика систем
автоматизированного
управления»
Лектор
Золотов А.Д.,
доцент кафедры «Автоматика и электротехника», к.т.н.
2.
В промышленных условиях автоматические системы могут находиться встатических (равновесных) и динамических (неравновесных) состояниях.
Равновесное состояние характеризуется постоянством во времени
входных, выходных и промежуточных величин. При эксплуатации объекта
равновесное состояние нарушается в результате действия различных
возмущений и все величины начинают изменяться во времени, такое их
состояние называется неравновесным.
Работа большинства объектов состоит в преобразовании по определенному
закону материальных и энергетических потоках. Закон преобразования
задается передаточной функцией. При этом возможны два режима работы
:
1.Статический;
2.Динамический.
3.
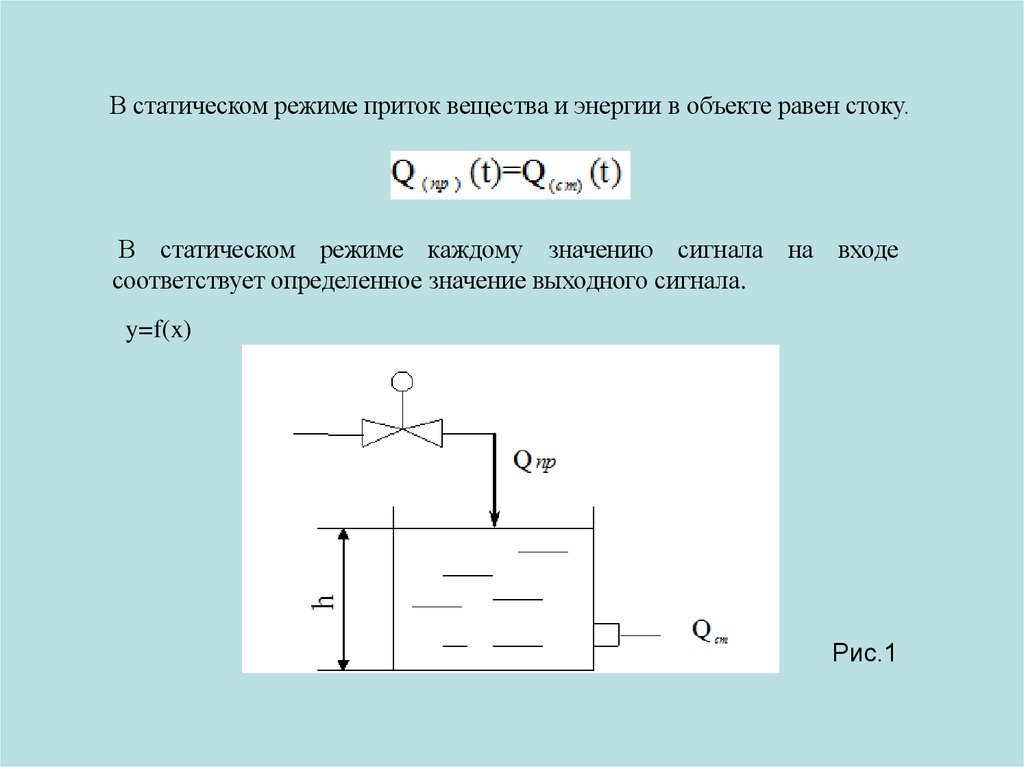
В статическом режиме приток вещества и энергии в объекте равен стоку.В статическом режиме каждому значению сигнала на входе
соответствует определенное значение выходного сигнала.
y=f(x)
Рис.1
4.
Уравнение динамики описывается дифференциальным уравнением.
Динамические системы также называют астатическими. Поэтому
изучение динамических свойств объекта составляет главную задачу
анализа АСР.
Главная задача анализа АСР. Существует два метода определения:
1.Аналитический;
2.Экспериментально – аналитический.
5.
Аналитический методУравнение математической модели объекта составляют на основании
главных физико – химических закономерностей, определяющих ход
процесса. Метод удобен тем, что в полученное уравнение входят основные
параметры процесса и наглядно видны связь этих параметров с
характеристикой объекта. Составляется уравнение материального и
энергетического баланса для динамического режима работы объекта.
Общий вид:
где T – постоянная времени;
К – коэффициент усиления;
X – регулирующее воздействие.
6.
Экспериментально – аналитическийМетод используют, когда статические и динамические
характеристики объекта определяются путем аналитической обработки
результатов эксперимента. Основной недостаток: полученная
математическая модель может быть использована только для данного
объекта. Экспериментальное определение характеристик объекта
производится активными методами: на объект, находящийся в
состоянии равновесия наносят импульсное входное воздействие,
реакция объекта на такое воздействие называется кривой разгона.
Кривую разгона получают по каналу передачи регулирующего
воздействия. С момента нанесения возмущения регулируемая величина
регулируется во времени до стабилизации ее на новом значении для
статического, или до установления постоянной скорости ее изменения
для астатического объекта.
7.
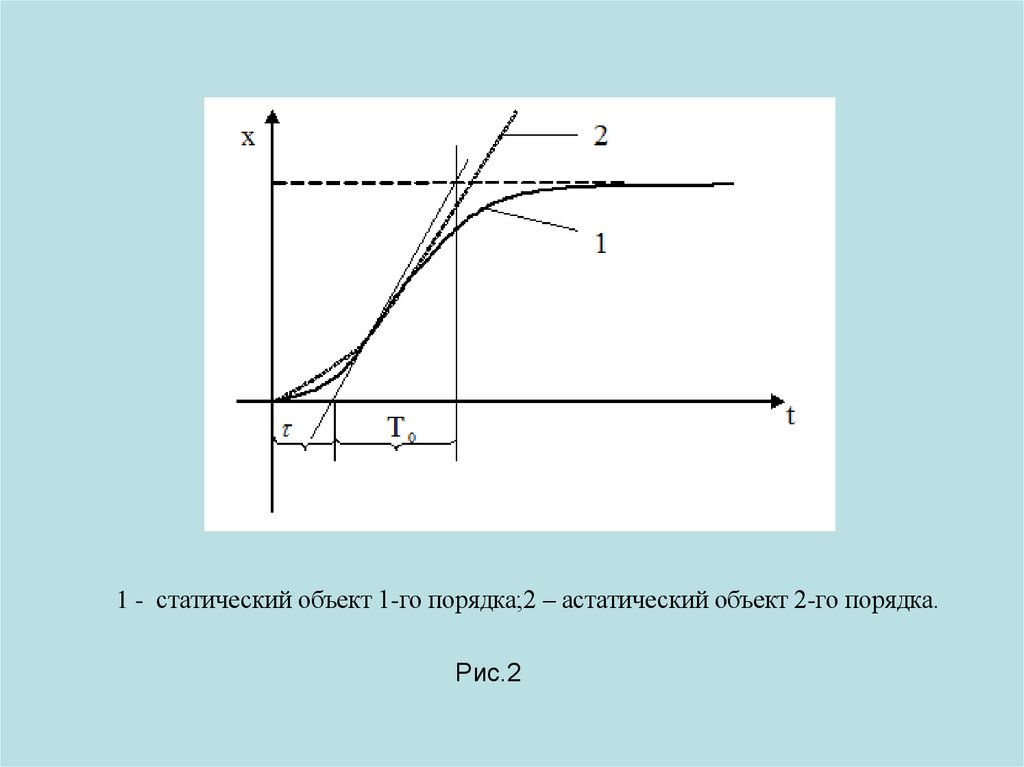
1 - статический объект 1-го порядка;2 – астатический объект 2-го порядка.Рис.2
8.
При снятии кривой разгона необходимо выполнить следующие условия:1.Если проектируется система стабилизации, то кривая разгона должна
сниматься в окрестности рабочей точки.
2. Кривые разгона необходимо снимать как при положительных, так и
отрицательных скачках управляющего воздействия. По виду кривых разгона
можно судить о степени асимметрии объекта. При большой асимметрии расчет
настроек регулятора рекомендуется вести по усредненным значениям.
3. При наличии “зашумленного” 5;10 % выхода двигателя необходимо снимать
несколько кривых разгона с последующим наложением друг на друга и
получение усредненной кривой.
4. При снятии кривой разгона необходимо выбирать наиболее стабильные
режимы, например, когда действие внешних случайных возмущений
маловероятно.
5. При снятии кривой разгона амплитуда пробного входного сигнала должна
быть с одной стороны достаточной, чтобы кривая разгона четко выделилась на
фоне шумов, с другой стороны достаточно малой, чтобы не нарушать
нормального хода технологического процесса. Поэтому в зависимости от
геометрических размеров объекта управления возмущающего воздействия по
каналу регулирования равно x=7-12% хода рабочего органа.
9.
Изменение во время выходной величины системы от момента нанесениявозмущающего воздействия до прихода ее в равновесное состояние
называют переходным процессом, он зависит как от динамических
свойств системы, так и входных воздействий и начальных условий.
вынужденная,
воздействия
определяется
видом
возмущающего
свободного движения, зависящая от свойств системы и
начальных условий.
В различных системах при одних и тех же процессах переходные
процессы протекают различно.
10.
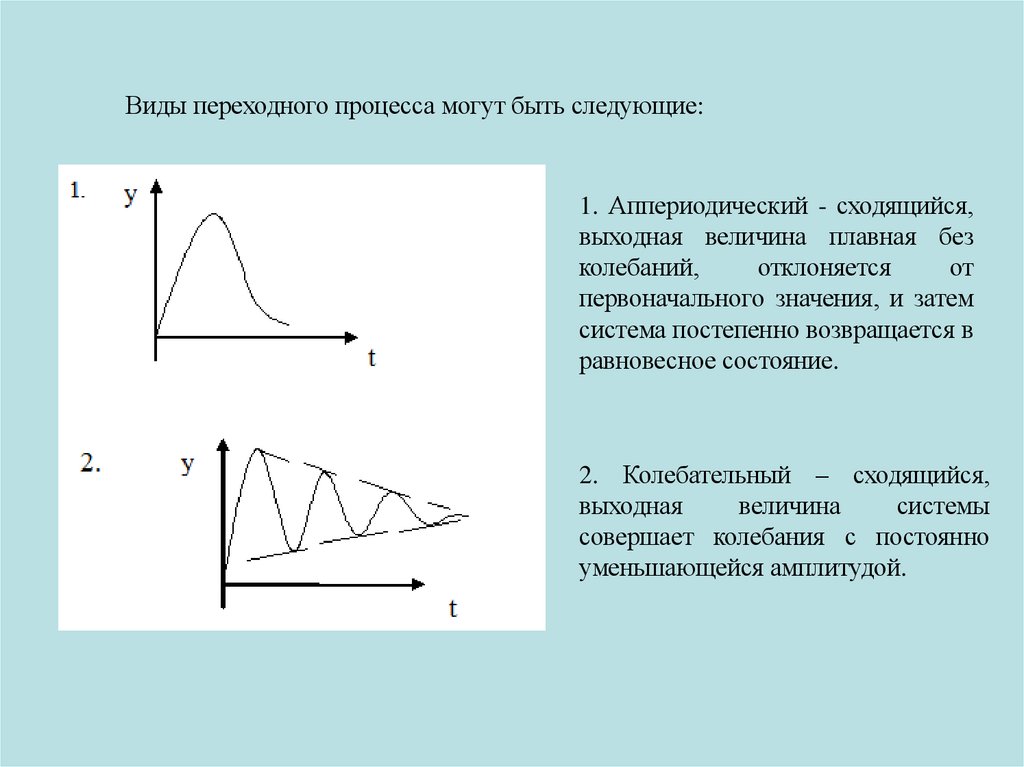
Виды переходного процесса могут быть следующие:1. Аппериодический - сходящийся,
выходная величина плавная без
колебаний,
отклоняется
от
первоначального значения, и затем
система постепенно возвращается в
равновесное состояние.
2. Колебательный – сходящийся,
выходная
величина
системы
совершает колебания с постоянно
уменьшающейся амплитудой.
11.
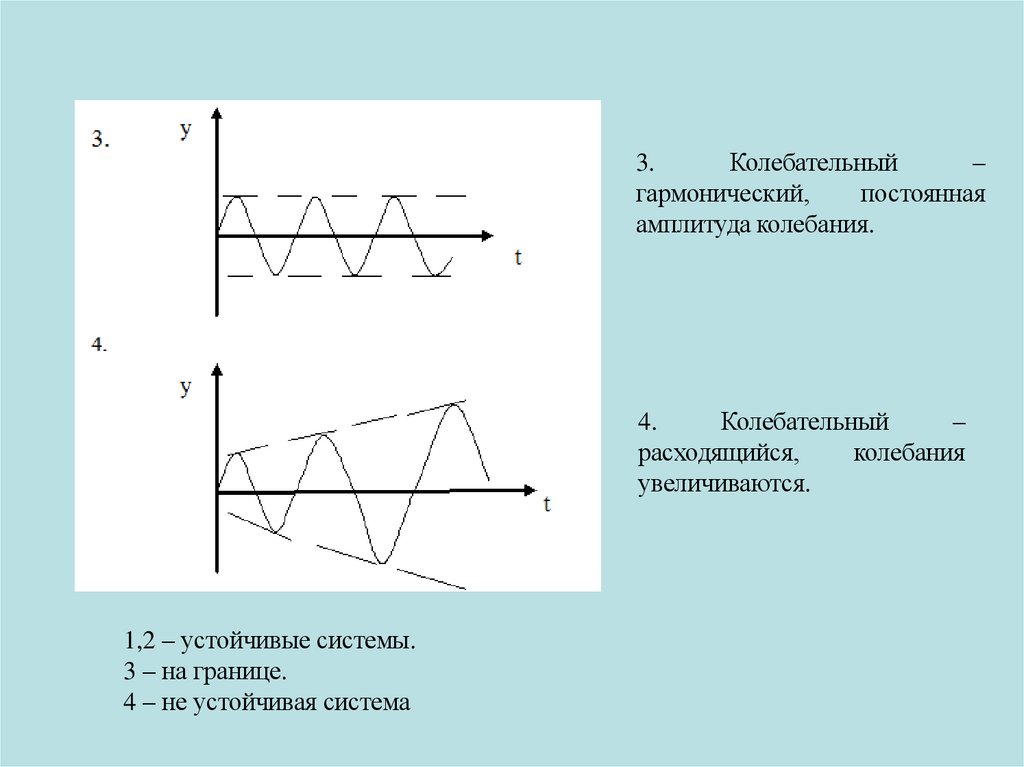
3.Колебательный
–
гармонический,
постоянная
амплитуда колебания.
4.
Колебательный
–
расходящийся,
колебания
увеличиваются.
1,2 – устойчивые системы.
3 – на границе.
4 – не устойчивая система
12.
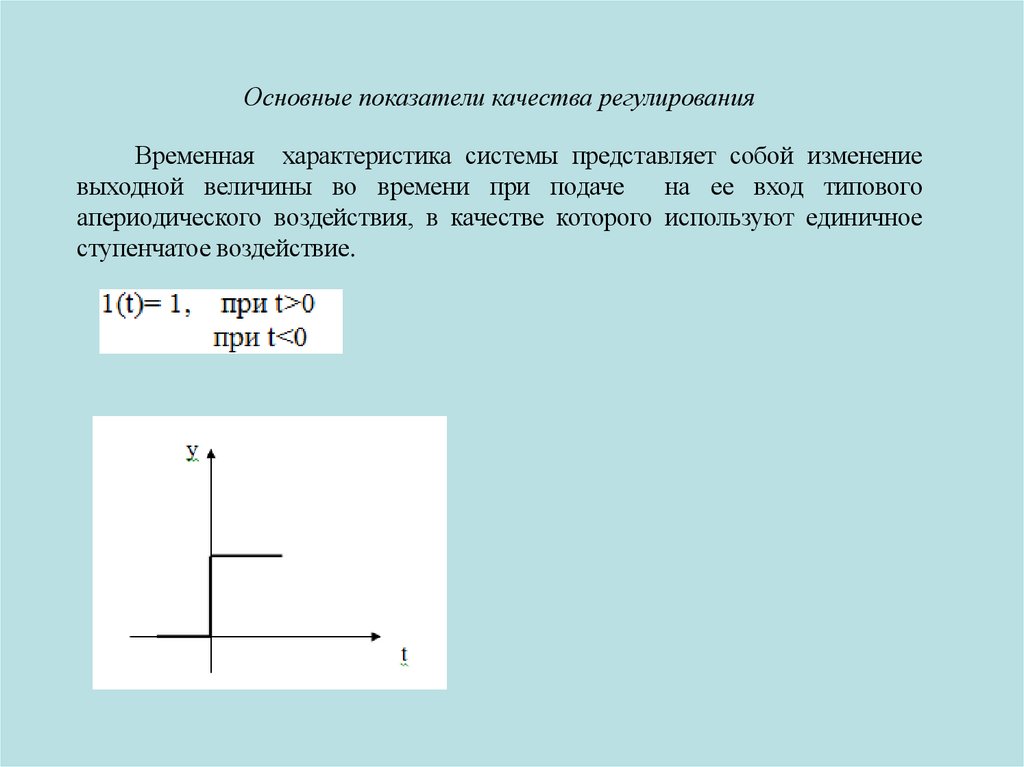
Основные показатели качества регулированияВременная характеристика системы представляет собой изменение
выходной величины во времени при подаче
на ее вход типового
апериодического воздействия, в качестве которого используют единичное
ступенчатое воздействие.
13.
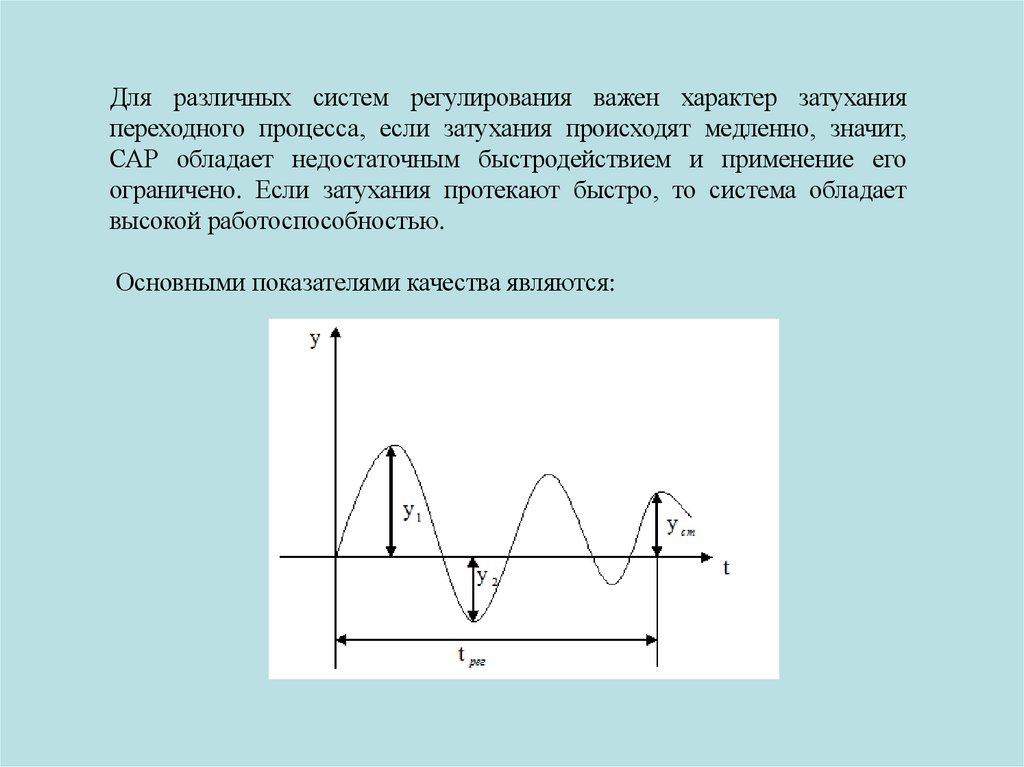
Для различных систем регулирования важен характер затуханияпереходного процесса, если затухания происходят медленно, значит,
САР обладает недостаточным быстродействием и применение его
ограничено. Если затухания протекают быстро, то система обладает
высокой работоспособностью.
Основными показателями качества являются:
14.
1. Статическая ошибка регулирования Y 1 - отклонение регулируемогопараметра от заданного значения после окончания переходного процесса.
2. Динамическая ошибка регулирования Y 2 – это максимальное отклонение
регулируемой величины от заданного значения.
3. Перерегулирование - это максимальное отклонение регулируемой
величины в установившемся режиме, выраженной в процентах %.
y1 y 2
100%
y1
4. Время регулирования – отрезок времени в течение, которого регулируемая
величина достигает нового установившегося с некоторой, заранее
установленной точностью.