









 Промышленность
ПромышленностьПохожие презентации:








 обеспечение полетов")

Автономное радионавигационное оборудование самолета А320 подготовил:
1. АВТОНОМНОЕ РАДИОНАВИГАЦИОННОЕ ОБОРУДОВАНИЕ САМОЛЕТА А320
Подготовил:студент 4 курса
25.03.02
Вставский С.А
2. Содержание
1.Общие сведения об автономном РНО2. Weather Radar / Predictive Windshear (WR / PWS)
3.Система предупреждения столкновения в воздухе (TCAS)
4.Радиовысотомер (RA)
5.Система предупреждения столкновения с землей (EGPWS)
6.HUD (Head-Up-Display)
7.Техническая эксплуатация
8.Контроль знаний
3.
1.Общие сведения об автономном РНОЧасть навигационных систем, именуемая автономной системой, обеспечивает информацию о безопасности полёта
воздушного судна без использования данных от наземных станций.
Автономное РНО А320 состоит из:
1. Weather Radar / Predictive Windshear (WR / PWS) (Метеорологический радиолокатор / Система прогнозирования
сдвига ветра)
Обнаруживает местоположение и интенсивность осадков, данные о которых отображаются на навигационных
дисплеях ND функция обнаружения сдвига ветра (windshear capability) служит для выявления внезапных
изменений скорости и/или направления ветра (опциональная функция).
2. Radio Altimeter (RA) (Радиовысотомер)
Определяет высоту полёта воздушного судна над поверхностью земли независимо от атмосферного давления.
3. Traffic Collision Avoidance System (TCAS) (Система предупреждения столкновений в воздухе)
Обнаруживает воздушные суда, находящиеся в непосредственной близости от самолёта.
4. Enhanced Ground Proximity Warning System (EGPWS)
(Усовершенствованная система предупреждения о сближении с землёй)
Предупреждает лётный экипаж о небезопасном поведении воздушного судна при приближении к земной
поверхности (в опасной конфигурации).
4.
2. Weather Radar / Predictive Windshear (WR / PWS)Бортовой метеорологический радиолокатор (Weather Radar, WXR) и система прогнозирования сдвига ветра (Predictive
WindShear, PWS) обнаруживают и определяют местоположение атмосферных возмущений, связанных с влагой, а также
явлений сдвига ветра в зоне, сканируемой антенной.
WXR помогает пилотам избегать этих зон и связанной с ними турбулентности путём определения их дальности и
пеленга. Также радиолокатор может использоваться для картографирования поверхности земли.
Радиолокатор излучает микроволновые импульсы через направленную антенну, которая принимает отражённые
сигналы.
Дальность до объекта определяется по времени, затраченному на возвращение эхо-сигнала. Азимут определяется по
положению антенны в момент приёма эхо-сигнала.
Воздушное судно оснащено одно- или двухканальным приёмопередатчиком метеорологического радиолокатора
диапазона X-диапазона Collins WXR-2100 с функцией мультисканирования и системой прогнозирования сдвига ветра
(Predictive Windshear System, PWS — система прогнозирования сдвига ветра).
Multiscan — функция радиолокатора, которая отображает все значимые метеорологические явления на любых
дальностях, на всех высотах полёта воздушного судна и в любое время на дисплее, практически свободном от помех
(clutter-free), без необходимости для пилотов вводить настройки угла наклона антенны (tilt) или усиления сигнала
(gain).
Multiscan снижает нагрузку на экипаж, одновременно повышая эффективность обнаружения метеообразований
5.
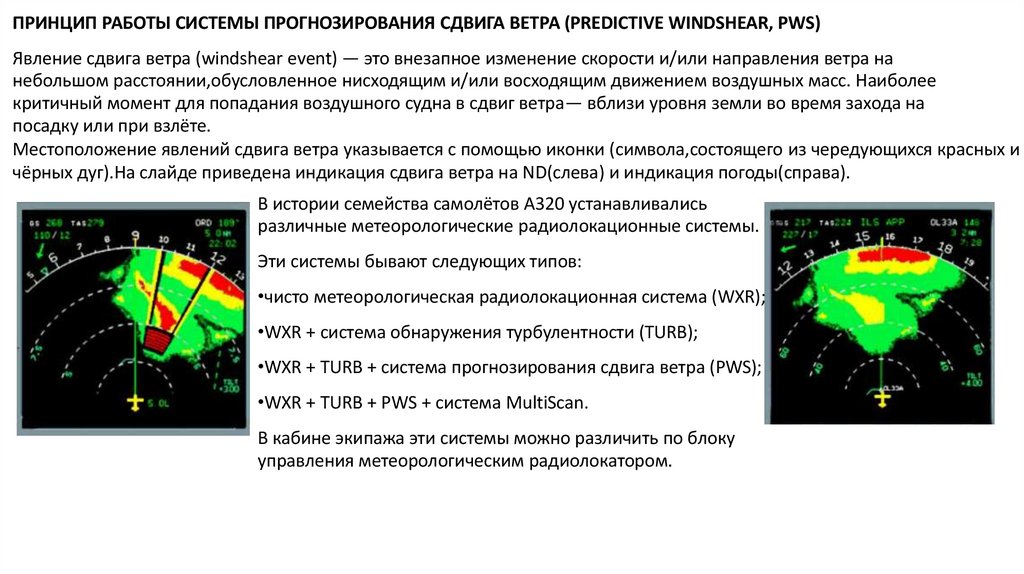
ПРИНЦИП РАБОТЫ СИСТЕМЫ ПРОГНОЗИРОВАНИЯ СДВИГА ВЕТРА (PREDICTIVE WINDSHEAR, PWS)Явление сдвига ветра (windshear event) — это внезапное изменение скорости и/или направления ветра на
небольшом расстоянии,обусловленное нисходящим и/или восходящим движением воздушных масс. Наиболее
критичный момент для попадания воздушного судна в сдвиг ветра— вблизи уровня земли во время захода на
посадку или при взлёте.
Местоположение явлений сдвига ветра указывается с помощью иконки (символа,состоящего из чередующихся красных и
чёрных дуг).На слайде приведена индикация сдвига ветра на ND(слева) и индикация погоды(справа).
В истории семейства самолётов A320 устанавливались
различные метеорологические радиолокационные системы.
Эти системы бывают следующих типов:
•чисто метеорологическая радиолокационная система (WXR);
•WXR + система обнаружения турбулентности (TURB);
•WXR + TURB + система прогнозирования сдвига ветра (PWS);
•WXR + TURB + PWS + система MultiScan.
В кабине экипажа эти системы можно различить по блоку
управления метеорологическим радиолокатором.
6.
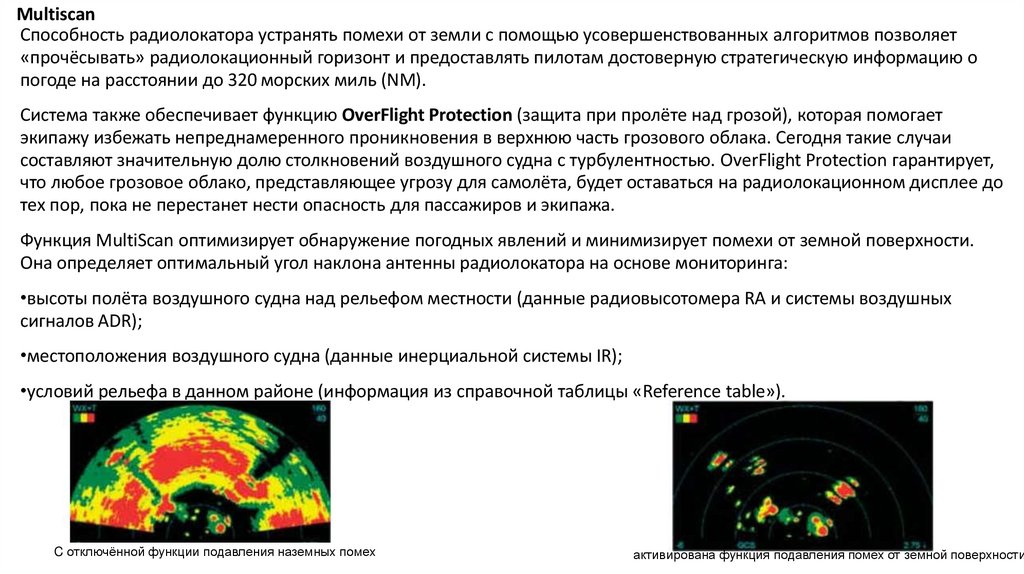
MultiscanСпособность радиолокатора устранять помехи от земли с помощью усовершенствованных алгоритмов позволяет
«прочёсывать» радиолокационный горизонт и предоставлять пилотам достоверную стратегическую информацию о
погоде на расстоянии до 320 морских миль (NM).
Система также обеспечивает функцию OverFlight Protection (защита при пролёте над грозой), которая помогает
экипажу избежать непреднамеренного проникновения в верхнюю часть грозового облака. Сегодня такие случаи
составляют значительную долю столкновений воздушного судна с турбулентностью. OverFlight Protection гарантирует,
что любое грозовое облако, представляющее угрозу для самолёта, будет оставаться на радиолокационном дисплее до
тех пор, пока не перестанет нести опасность для пассажиров и экипажа.
Функция MultiScan оптимизирует обнаружение погодных явлений и минимизирует помехи от земной поверхности.
Она определяет оптимальный угол наклона антенны радиолокатора на основе мониторинга:
•высоты полёта воздушного судна над рельефом местности (данные радиовысотомера RA и системы воздушных
сигналов ADR);
•местоположения воздушного судна (данные инерциальной системы IR);
•условий рельефа в данном районе (информация из справочной таблицы «Reference table»).
C отключённой функции подавления наземных помех
активирована функция подавления помех от земной поверхности
7.
Состав системы метеолокацииОсновные компоненты системы:
•антенна;
•волновод;
•приёмопередатчик WXR (XCVR) на двойном монтажном кронштейне — с возможностью установки
дополнительного второго приёмопередатчика (XCVR);
•блок управления.
Система WXR/PWS также подключена к навигационным дисплеям (ND) через компьютеры управления
отображением (Display Management Computers, DMC) для вывода информации на экран.
8.
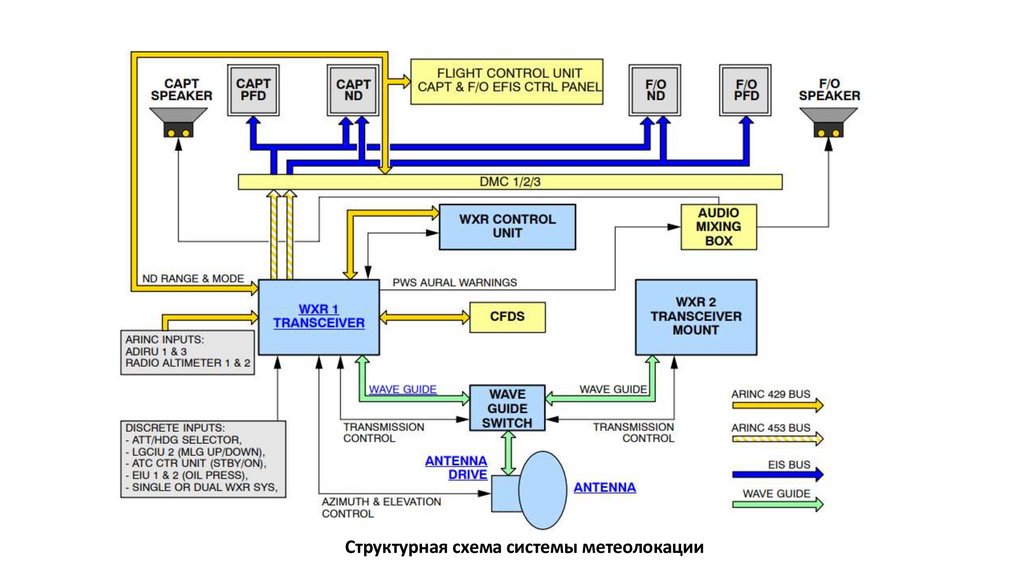
Структурная схема системы метеолокации9.
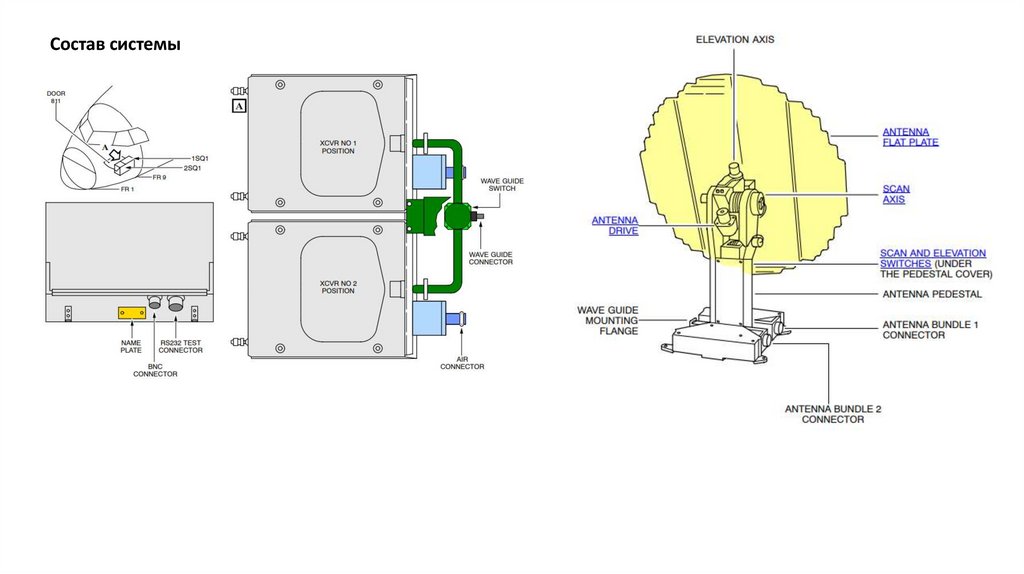
Состав системы10.
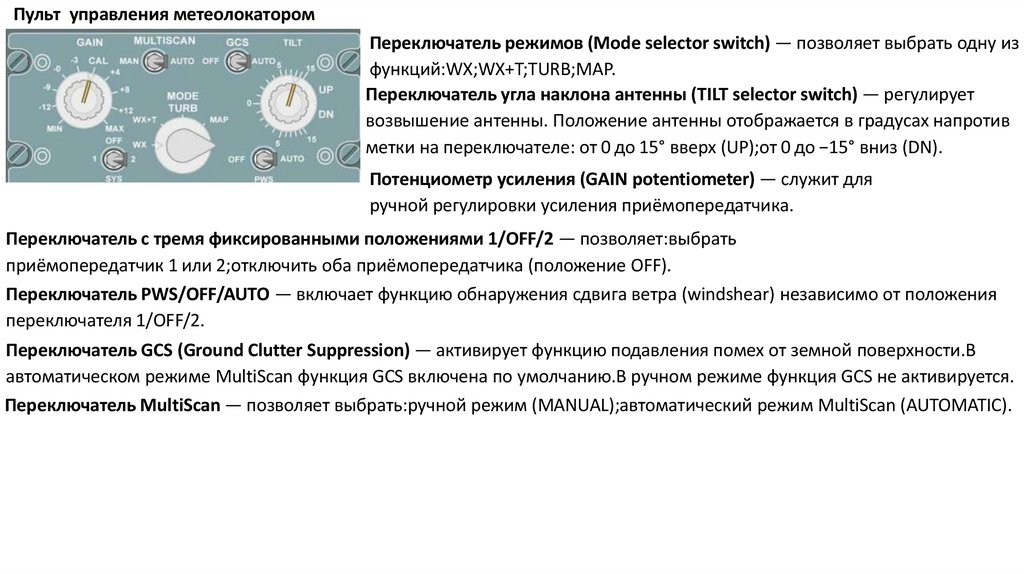
Пульт управления метеолокаторомПереключатель режимов (Mode selector switch) — позволяет выбрать одну из
функций:WX;WX+T;TURB;MAP.
Переключатель угла наклона антенны (TILT selector switch) — регулирует
возвышение антенны. Положение антенны отображается в градусах напротив
метки на переключателе: от 0 до 15° вверх (UP);от 0 до −15° вниз (DN).
Потенциометр усиления (GAIN potentiometer) — служит для
ручной регулировки усиления приёмопередатчика.
Переключатель с тремя фиксированными положениями 1/OFF/2 — позволяет:выбрать
приёмопередатчик 1 или 2;отключить оба приёмопередатчика (положение OFF).
Переключатель PWS/OFF/AUTO — включает функцию обнаружения сдвига ветра (windshear) независимо от положения
переключателя 1/OFF/2.
Переключатель GCS (Ground Clutter Suppression) — активирует функцию подавления помех от земной поверхности.В
автоматическом режиме MultiScan функция GCS включена по умолчанию.В ручном режиме функция GCS не активируется.
Переключатель MultiScan — позволяет выбрать:ручной режим (MANUAL);автоматический режим MultiScan (AUTOMATIC).
11.
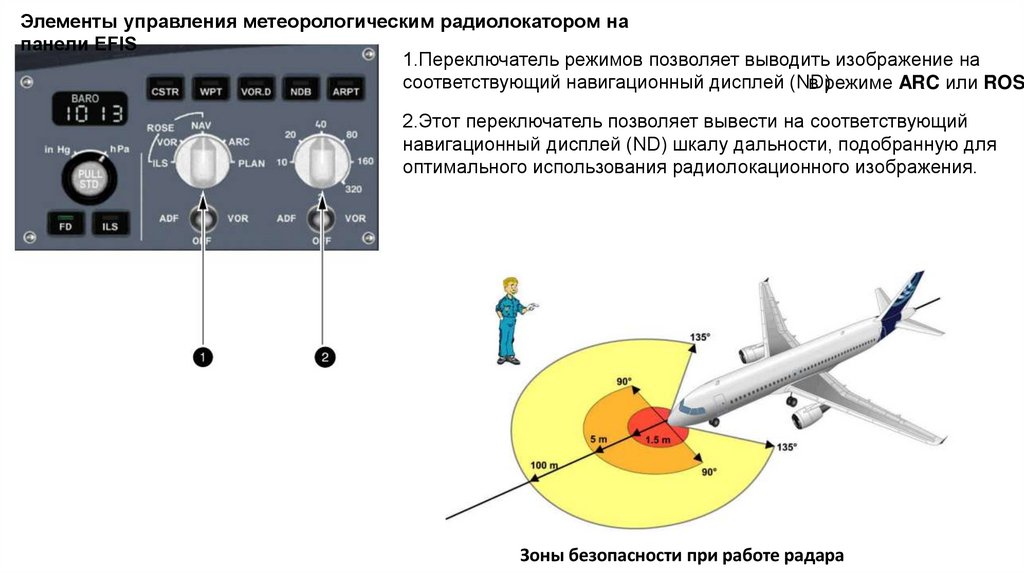
Элементы управления метеорологическим радиолокатором напанели EFIS
1.Переключатель режимов позволяет выводить изображение на
соответствующий навигационный дисплей (ND)
в режиме ARC или ROSE
2.Этот переключатель позволяет вывести на соответствующий
навигационный дисплей (ND) шкалу дальности, подобранную для
оптимального использования радиолокационного изображения.
Зоны безопасности при работе радара
12. 3.Система предупреждения столкновения в воздухе
Система предупреждения столкновений в воздухе (TCAS) — это система, функция которой заключаетсяв обнаружении и отображении воздушных судов в непосредственной близости и предоставлении
экипажу указаний для избежания столкновения с этими нарушителями.
Система предупреждения столкновений в воздухе и раннего предупреждения приближения к земле
(T2CAS) является опциональной системой, обеспечивающей те же функции, что и TCAS.
Система TCAS II предназначена для предоставления системе управления воздушным движением
дополнительной возможности. Она обычно работает независимо, но может управляться с наземных
станций.
TCAS способна взаимодействовать с наземными станциями ATCRBS (Радиолокационная система
опознавания УВД), оборудованными системой режима S, чтобы передавать им команды на
вертикальный маневр, выдаваемые пилоту воздушного судна.
13. Состав
Компоненты TCAS (или T2CAS) включают:• две антенны;
• один вычислитель TCAS II (или вычислитель T2CAS)
Структурная схема TCAS
14.
Расположение компонентов системы предупреждения столкновения в воздухе15.
Управление системой TCASTCAS MODE (7) – переключатель режима работы TCAS с
положениями:
- THRT - на ND будут видны представляющие опасность ВС в
границах +/- 2700 фт.
По высоте;
- ALL - на ND будут видны любые ВС в границах +/- 2700 фт.
По высоте (используется на эшелоне);
- ABV - на ND будут видны ВС в границах +8000/-2700 фт. По
высоте (выставляется до взлета);
- BLW - на ND будут видны ВС в границах -8000/+2700 фт.
По высоте (выставляется при снижении с эшелона);
TCAS ADVISORY MODE (8) – переключатель режимов
рекомендаций TCAS с положениями:
- STDBY - ВС показываются на ND в соответствии с
выбранным TCAS MODE, однако рекомендации пилоту не
выдаются;
- TA - если TCAS определяет, что какое-то воздушное судно
сближается по потенциально опасной траектории с нашим
ВС, то звучит голосовое предупреждение «TRAFFIC»;
-TA/RA - если TCAS определяет, что какое-то воздушное
судно очень близко, и дальнейшее сближение с ним
вызовет столкновение, то звучит сигнал тревоги и
голосовое сообщение по выполнению маневра уклонения;
Зеленый сектор указывает нужную
вертикальную скорость
Запрещенная вертикальная скорость
Текущая вертикальная скорость
16.
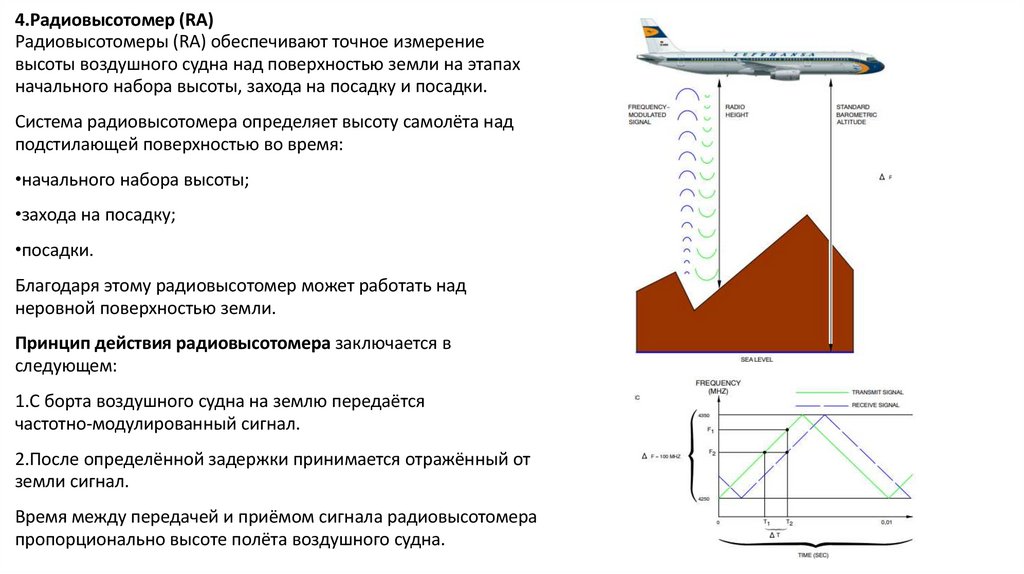
4.Радиовысотомер (RA)Радиовысотомеры (RA) обеспечивают точное измерение
высоты воздушного судна над поверхностью земли на этапах
начального набора высоты, захода на посадку и посадки.
Система радиовысотомера определяет высоту самолёта над
подстилающей поверхностью во время:
•начального набора высоты;
•захода на посадку;
•посадки.
Благодаря этому радиовысотомер может работать над
неровной поверхностью земли.
Принцип действия радиовысотомера заключается в
следующем:
1.С борта воздушного судна на землю передаётся
частотно-модулированный сигнал.
2.После определённой задержки принимается отражённый от
земли сигнал.
Время между передачей и приёмом сигнала радиовысотомера
пропорционально высоте полёта воздушного судна.
17.
СоставРадиовысотомер включает две независимые системы.
Каждая система состоит из:
•одного приёмопередатчика;
•одной передающей антенны;
•одной приёмной антенны;
•одного вентилятора 3SA1.
Дополнительно блок централизованного интерфейса
отображения отказов (CFDIU) управляет системой
через многофункциональный блок управления и индикации 1 (2)
(MCDU) — в целях тестирования.
Данные о радиовысоте отображаются на основном пилотажном
дисплее (PFD).
В штатном режиме:
•система 1 передаёт информацию на PFD капитана (CAPT PFD);
•система 2 — на PFD второго пилота (F/O PFD).
18.
В штатном режиме радиовысотомер RA 1 передаёт данные о высоте на основной пилотажный дисплей капитана(CAPT PFD), а RA 2 — на дисплей второго пилота (F/O PFD) через компьютеры управления отображением (Display
Management Computers, DMCs).
При отказе одного из приёмопередатчиков DMC автоматически переключается на работоспособный прибор.
Информация о радиовысоте отображается на PFD, если её значение не превышает 2 500 футов (≤ 2 500 ft)
Радиовысотомер взаимодействует со следующими бортовыми
вычислительными системами:
•ELAC 1 и 2 (Elevator and Aileron Computers) — компьютеры управления
элеронами и рулём высоты;
•FMGC 1 и 2 (Flight Management Guidance Computers) — компьютеры
управления и навигации;
•TCAS Computer (Traffic Collision Avoidance System) — компьютер системы
предупреждения столкновений;
•GPWC (Ground Proximity Warning Computer) — компьютер системы
предупреждения о приближении к земле (подключается только к RA 1);
•FWC 1 и 2 (Flight Warning Computers) — компьютеры предупредительной
сигнализации;
•CFDIU (Centralized Fault Display Interface Unit) —
•блок централизованного интерфейса отображения отказов;
•WXR (Weather Radar) — метеорологический радиолокатор (при наличии
функции PWS — Predictive Windshear);
•EIU 1 и 2 (Engine Interface Units) — интерфейсные блоки двигателей
Структурная схема RA
19.
5.Система предупреждения столкновения с землей (EGPWS)Назначение системы EGPWS (Enhanced Ground Proximity Warning System — усовершенствованная система
предупреждения о приближении к земле) — формировать звуковые и визуальные предупреждения в случае, если
воздушное судно принимает потенциально опасную конфигурацию, ведущую к столкновению с землёй в управляемом
полёте (CFIT — Controlled Flight Into Terrain).
Базовые режимы GPWS и расширенные функции EGPWS
Базовые режимы GPWS (основаны преимущественно на данных радиовысотомера, положении шасси и закрылков):
Режим 1 — чрезмерная скорость снижения (Excessive rate of descent).
Режим 2 — чрезмерно быстрое сближение с рельефом (Excessive closure rate with terrain).
Режим 3 — снижение после взлёта и минимальный запас высоты над рельефом (Descent after takeoff and minimum terrain
clearance).
Режим 4 — небезопасный запас высоты над рельефом (Unsafe terrain clearance).
Режим 5 — снижение ниже глиссады (Descent below glide slope).
Расширенные функции EGPWS (дополняют базовые режимы GPWS):
TCF (Terrain Clearance Floor) — увеличивает зону безопасного удаления от рельефа в районе взлётно-посадочной полосы
аэропорта.
TAD (Terrain Awareness alerting and Display) — включает базу данных рельефа:
1.Прогнозирует возможное столкновение траектории полёта с рельефом;
2.Отображает потенциально конфликтные участки рельефа на экране.
T2CAS — в качестве опции может заменять систему EGPWS.
20.
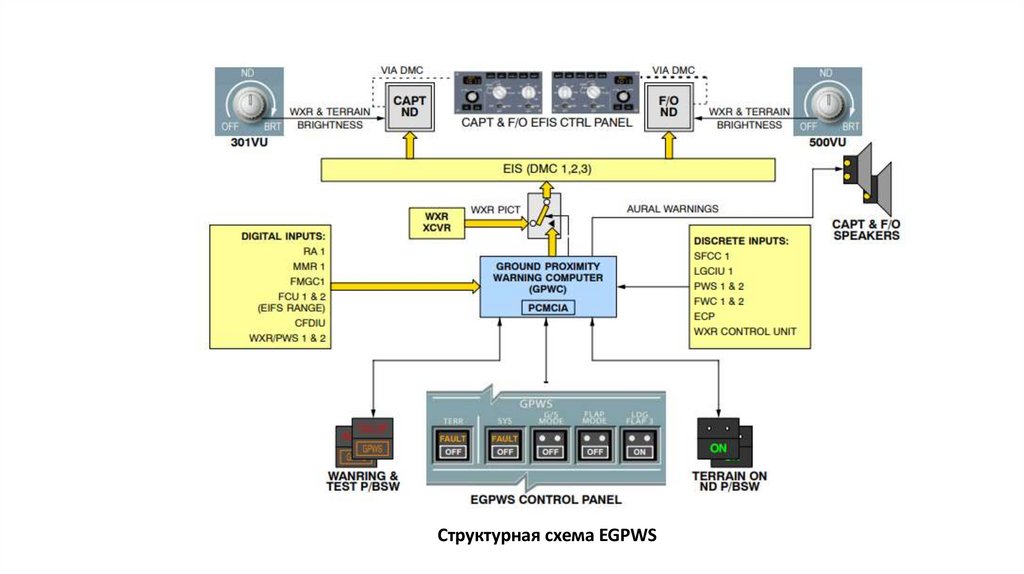
Компоненты системы EGPWSСистема включает следующие основные элементы:
•компьютер EGPWC (Enhanced Ground Proximity Warning Computer) либо его аналог —
T2CAS;
•панель управления GPWS;
•два сигнальных индикатора (предупреждающих лампы);
•два переключателя режима TERRAIN ON ND (кнопки с подсветкой, P/BSW).
Взаимодействие с навигационными системами
• EGPWS (в том числе в конфигурации T2CAS-TAWS) подключена к ряду навигационных
систем:
•радиовысотомер;
•система инструментальной посадки (ILS);
•инерциально-навигационная система воздушных данных (ADIRS);
•система управления полётом (FMS) и др.
Система обрабатывает поступающие навигационные данные и формирует
предупредительные сигналы (аварийные сообщения).
Особенности T2CAS
•выполнен в виде единого сменного блока (LRU — Line Replaceable Unit);
•органы управления T2CAS аналогичны элементам управления стандартной системы
EGPWS.
21.
Структурная схема EGPWS22.
Расположение элементов EGPWS и индикация системы23.
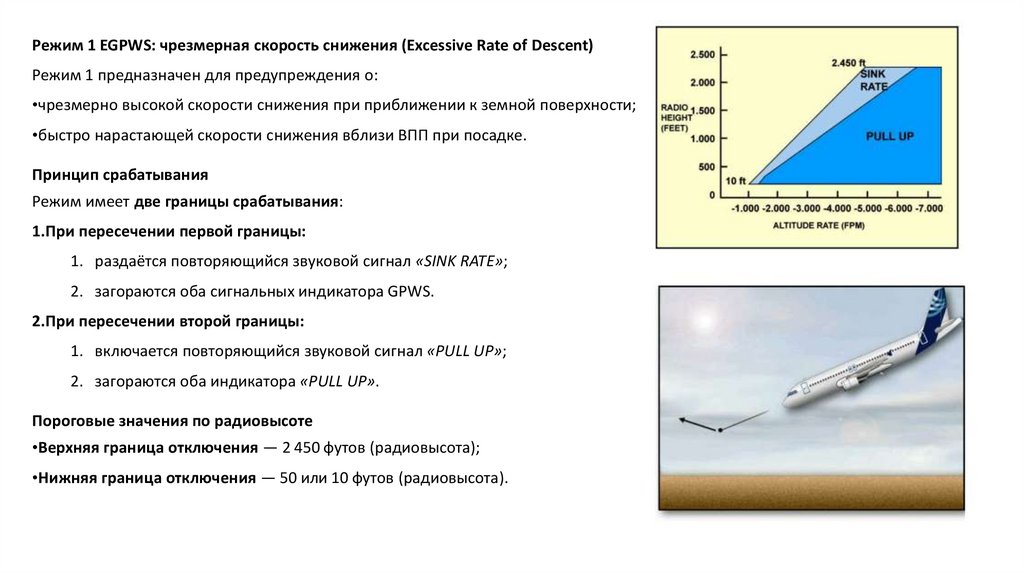
Режим 1 EGPWS: чрезмерная скорость снижения (Excessive Rate of Descent)Режим 1 предназначен для предупреждения о:
•чрезмерно высокой скорости снижения при приближении к земной поверхности;
•быстро нарастающей скорости снижения вблизи ВПП при посадке.
Принцип срабатывания
Режим имеет две границы срабатывания:
1.При пересечении первой границы:
1. раздаётся повторяющийся звуковой сигнал «SINK RATE»;
2. загораются оба сигнальных индикатора GPWS.
2.При пересечении второй границы:
1. включается повторяющийся звуковой сигнал «PULL UP»;
2. загораются оба индикатора «PULL UP».
Пороговые значения по радиовысоте
•Верхняя граница отключения — 2 450 футов (радиовысота);
•Нижняя граница отключения — 50 или 10 футов (радиовысота).
24.
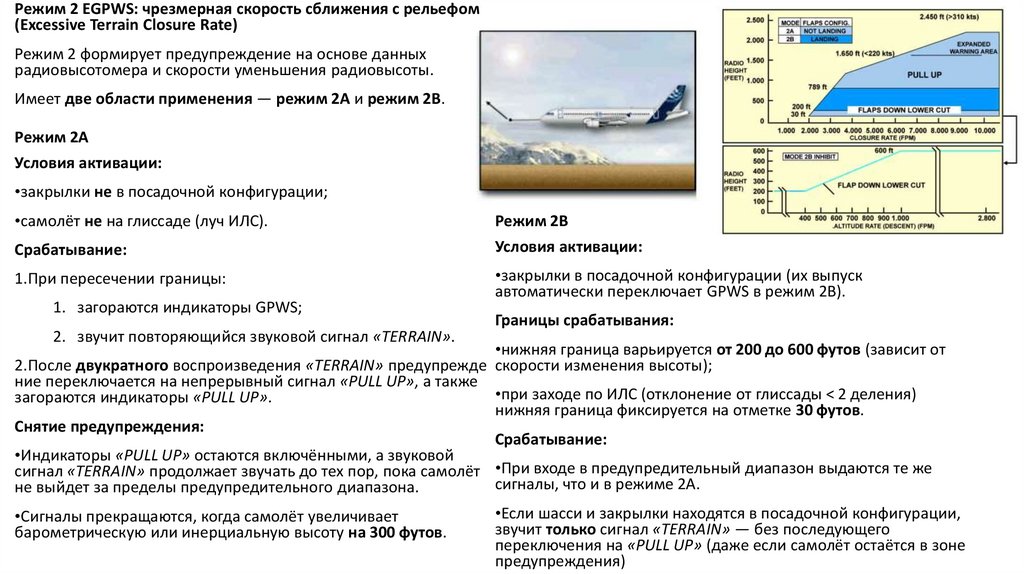
Режим 2 EGPWS: чрезмерная скорость сближения с рельефом(Excessive Terrain Closure Rate)
Режим 2 формирует предупреждение на основе данных
радиовысотомера и скорости уменьшения радиовысоты.
Имеет две области применения — режим 2А и режим 2В.
Режим 2А
Условия активации:
•закрылки не в посадочной конфигурации;
•самолёт не на глиссаде (луч ИЛС).
Режим 2В
Срабатывание:
Условия активации:
1.При пересечении границы:
•закрылки в посадочной конфигурации (их выпуск
автоматически переключает GPWS в режим 2В).
1. загораются индикаторы GPWS;
2. звучит повторяющийся звуковой сигнал «TERRAIN».
Границы срабатывания:
•нижняя граница варьируется от 200 до 600 футов (зависит от
2.После двукратного воспроизведения «TERRAIN» предупрежде скорости изменения высоты);
ние переключается на непрерывный сигнал «PULL UP», а также
•при заходе по ИЛС (отклонение от глиссады < 2 деления)
загораются индикаторы «PULL UP».
нижняя граница фиксируется на отметке 30 футов.
Снятие предупреждения:
Срабатывание:
•Индикаторы «PULL UP» остаются включёнными, а звуковой
сигнал «TERRAIN» продолжает звучать до тех пор, пока самолёт •При входе в предупредительный диапазон выдаются те же
сигналы, что и в режиме 2А.
не выйдет за пределы предупредительного диапазона.
•Сигналы прекращаются, когда самолёт увеличивает
барометрическую или инерциальную высоту на 300 футов.
•Если шасси и закрылки находятся в посадочной конфигурации,
звучит только сигнал «TERRAIN» — без последующего
переключения на «PULL UP» (даже если самолёт остаётся в зоне
предупреждения)
25.
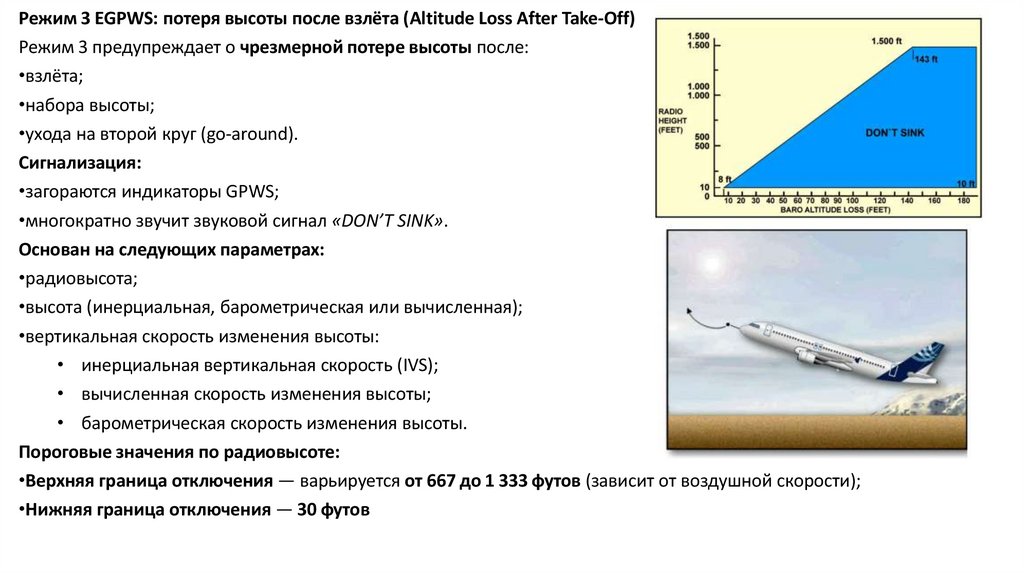
Режим 3 EGPWS: потеря высоты после взлёта (Altitude Loss After Take-Off)Режим 3 предупреждает о чрезмерной потере высоты после:
•взлёта;
•набора высоты;
•ухода на второй круг (go-around).
Сигнализация:
•загораются индикаторы GPWS;
•многократно звучит звуковой сигнал «DON’T SINK».
Основан на следующих параметрах:
•радиовысота;
•высота (инерциальная, барометрическая или вычисленная);
•вертикальная скорость изменения высоты:
• инерциальная вертикальная скорость (IVS);
• вычисленная скорость изменения высоты;
• барометрическая скорость изменения высоты.
Пороговые значения по радиовысоте:
•Верхняя граница отключения — варьируется от 667 до 1 333 футов (зависит от воздушной скорости);
•Нижняя граница отключения — 30 футов
26.
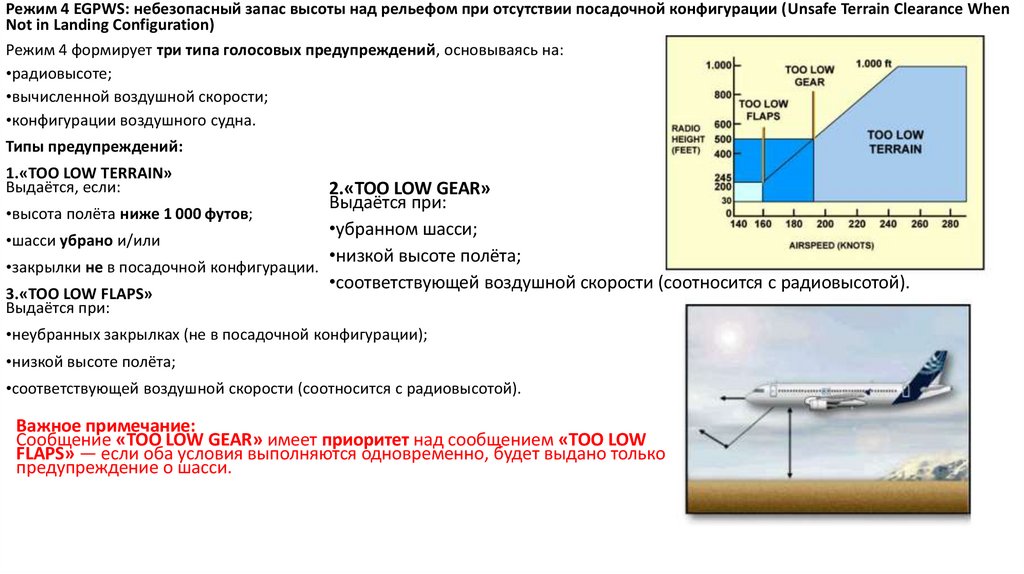
Режим 4 EGPWS: небезопасный запас высоты над рельефом при отсутствии посадочной конфигурации (Unsafe Terrain Clearance WhenNot in Landing Configuration)
Режим 4 формирует три типа голосовых предупреждений, основываясь на:
•радиовысоте;
•вычисленной воздушной скорости;
•конфигурации воздушного судна.
Типы предупреждений:
1.«TOO LOW TERRAIN»
Выдаётся, если:
2.«TOO LOW GEAR»
Выдаётся при:
•высота полёта ниже 1 000 футов;
•убранном шасси;
•шасси убрано и/или
•низкой высоте полёта;
•закрылки не в посадочной конфигурации.
•соответствующей воздушной скорости (соотносится с радиовысотой).
3.«TOO LOW FLAPS»
Выдаётся при:
•неубранных закрылках (не в посадочной конфигурации);
•низкой высоте полёта;
•соответствующей воздушной скорости (соотносится с радиовысотой).
Важное примечание:
Сообщение «TOO LOW GEAR» имеет приоритет над сообщением «TOO LOW
FLAPS» — если оба условия выполняются одновременно, будет выдано только
предупреждение о шасси.
27.
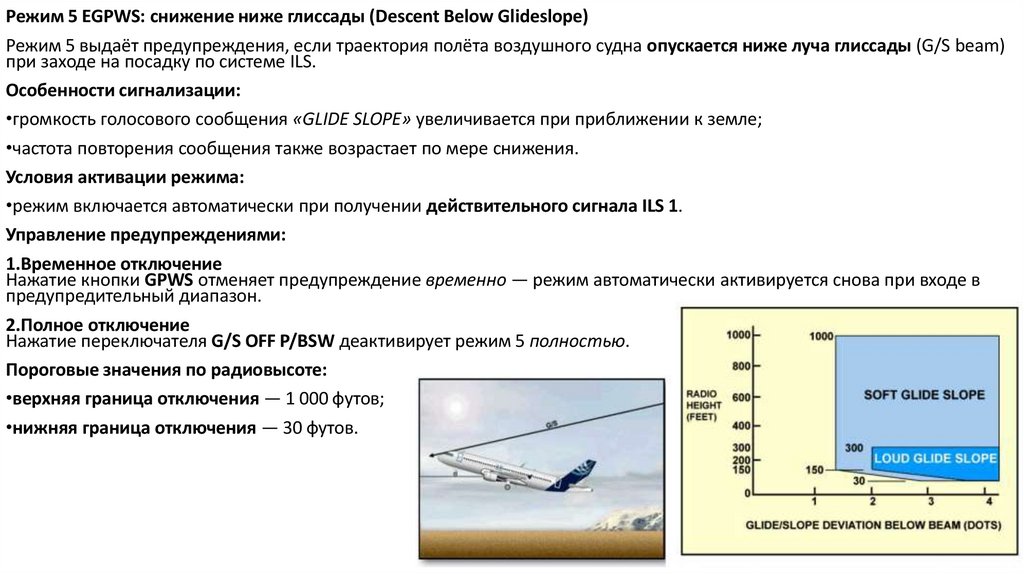
Режим 5 EGPWS: снижение ниже глиссады (Descent Below Glideslope)Режим 5 выдаёт предупреждения, если траектория полёта воздушного судна опускается ниже луча глиссады (G/S beam)
при заходе на посадку по системе ILS.
Особенности сигнализации:
•громкость голосового сообщения «GLIDE SLOPE» увеличивается при приближении к земле;
•частота повторения сообщения также возрастает по мере снижения.
Условия активации режима:
•режим включается автоматически при получении действительного сигнала ILS 1.
Управление предупреждениями:
1.Временное отключение
Нажатие кнопки GPWS отменяет предупреждение временно — режим автоматически активируется снова при входе в
предупредительный диапазон.
2.Полное отключение
Нажатие переключателя G/S OFF P/BSW деактивирует режим 5 полностью.
Пороговые значения по радиовысоте:
•верхняя граница отключения — 1 000 футов;
•нижняя граница отключения — 30 футов.
28.
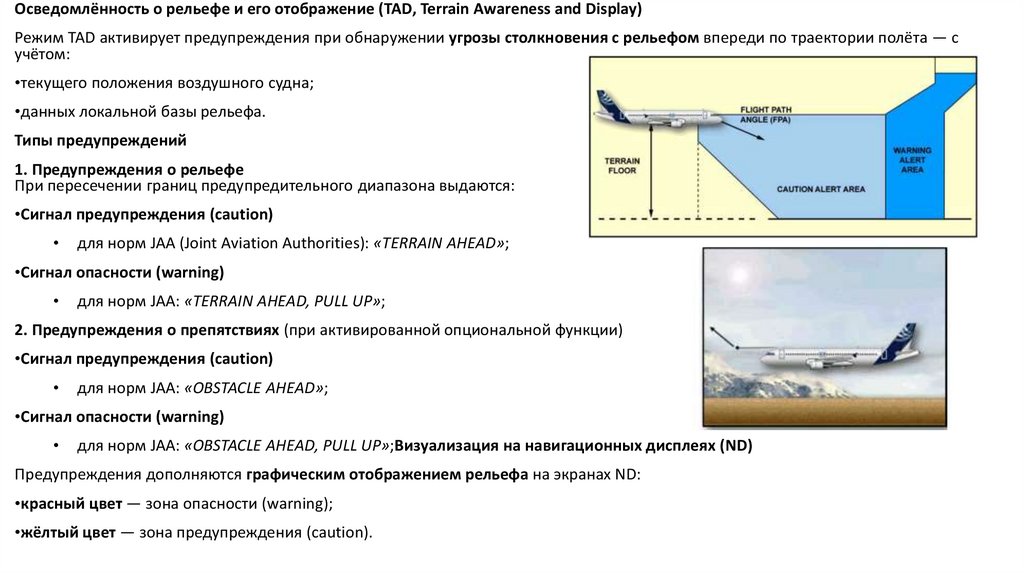
Осведомлённость о рельефе и его отображение (TAD, Terrain Awareness and Display)Режим TAD активирует предупреждения при обнаружении угрозы столкновения с рельефом впереди по траектории полёта — с
учётом:
•текущего положения воздушного судна;
•данных локальной базы рельефа.
Типы предупреждений
1. Предупреждения о рельефе
При пересечении границ предупредительного диапазона выдаются:
•Сигнал предупреждения (caution)
для норм JAA (Joint Aviation Authorities): «TERRAIN AHEAD»;
•Сигнал опасности (warning)
для норм JAA: «TERRAIN AHEAD, PULL UP»;
2. Предупреждения о препятствиях (при активированной опциональной функции)
•Сигнал предупреждения (caution)
для норм JAA: «OBSTACLE AHEAD»;
•Сигнал опасности (warning)
для норм JAA: «OBSTACLE AHEAD, PULL UP»;Визуализация на навигационных дисплеях (ND)
Предупреждения дополняются графическим отображением рельефа на экранах ND:
•красный цвет — зона опасности (warning);
•жёлтый цвет — зона предупреждения (caution).
29.
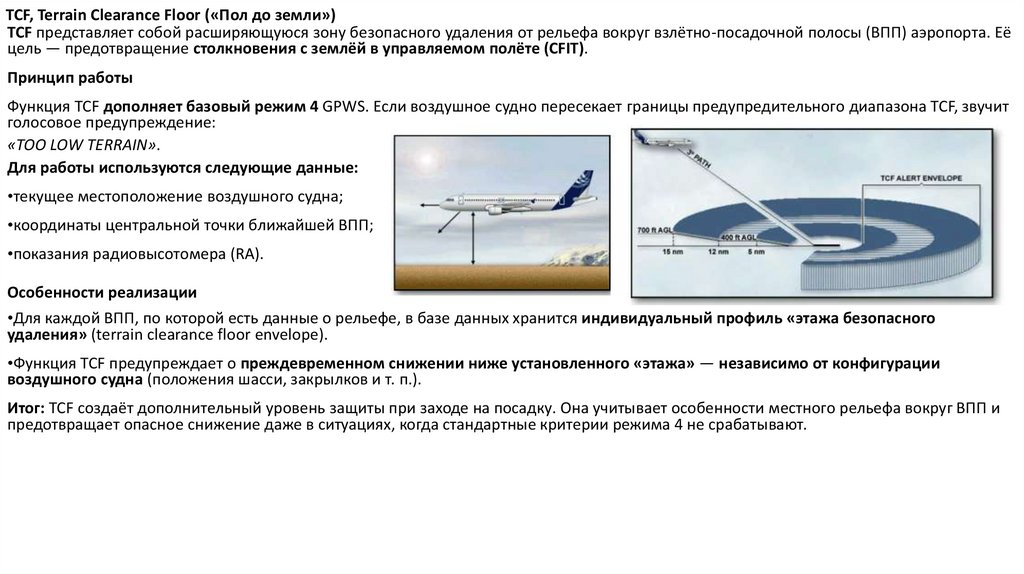
TCF, Terrain Clearance Floor («Пол до земли»)TCF представляет собой расширяющуюся зону безопасного удаления от рельефа вокруг взлётно-посадочной полосы (ВПП) аэропорта. Её
цель — предотвращение столкновения с землёй в управляемом полёте (CFIT).
Принцип работы
Функция TCF дополняет базовый режим 4 GPWS. Если воздушное судно пересекает границы предупредительного диапазона TCF, звучит
голосовое предупреждение:
«TOO LOW TERRAIN».
Для работы используются следующие данные:
•текущее местоположение воздушного судна;
•координаты центральной точки ближайшей ВПП;
•показания радиовысотомера (RA).
Особенности реализации
•Для каждой ВПП, по которой есть данные о рельефе, в базе данных хранится индивидуальный профиль «этажа безопасного
удаления» (terrain clearance floor envelope).
•Функция TCF предупреждает о преждевременном снижении ниже установленного «этажа» — независимо от конфигурации
воздушного судна (положения шасси, закрылков и т. п.).
Итог: TCF создаёт дополнительный уровень защиты при заходе на посадку. Она учитывает особенности местного рельефа вокруг ВПП и
предотвращает опасное снижение даже в ситуациях, когда стандартные критерии режима 4 не срабатывают.
30.
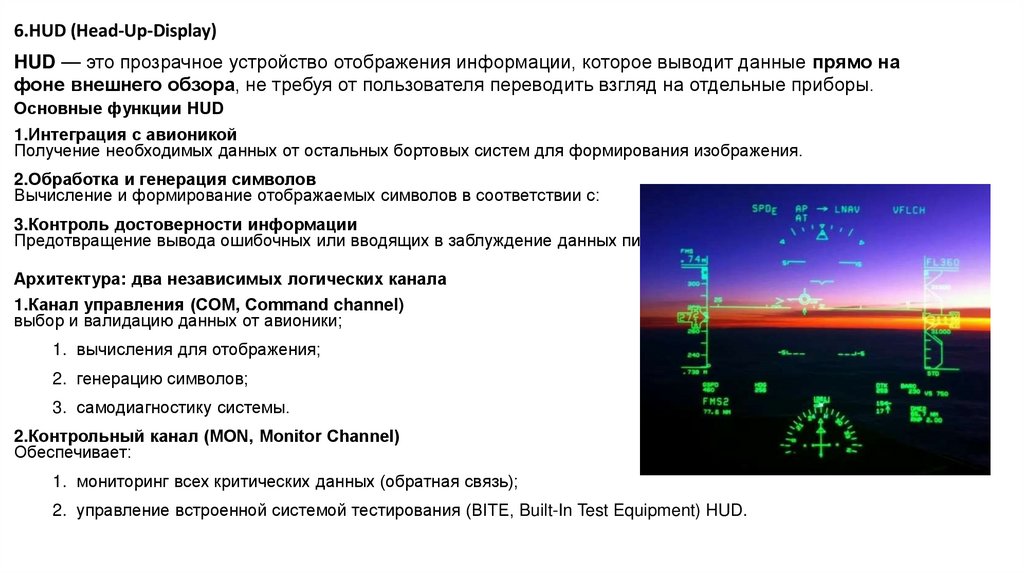
6.HUD (Head-Up-Display)HUD — это прозрачное устройство отображения информации, которое выводит данные прямо на
фоне внешнего обзора, не требуя от пользователя переводить взгляд на отдельные приборы.
Основные функции HUD
1.Интеграция с авионикой
Получение необходимых данных от остальных бортовых систем для формирования изображения.
2.Обработка и генерация символов
Вычисление и формирование отображаемых символов в соответствии с:
3.Контроль достоверности информации
Предотвращение вывода ошибочных или вводящих в заблуждение данных пилоту.
Архитектура: два независимых логических канала
1.Канал управления (COM, Command channel)
выбор и валидацию данных от авионики;
1. вычисления для отображения;
2. генерацию символов;
3. самодиагностику системы.
2.Контрольный канал (MON, Monitor Channel)
Обеспечивает:
1. мониторинг всех критических данных (обратная связь);
2. управление встроенной системой тестирования (BITE, Built-In Test Equipment) HUD.
31.
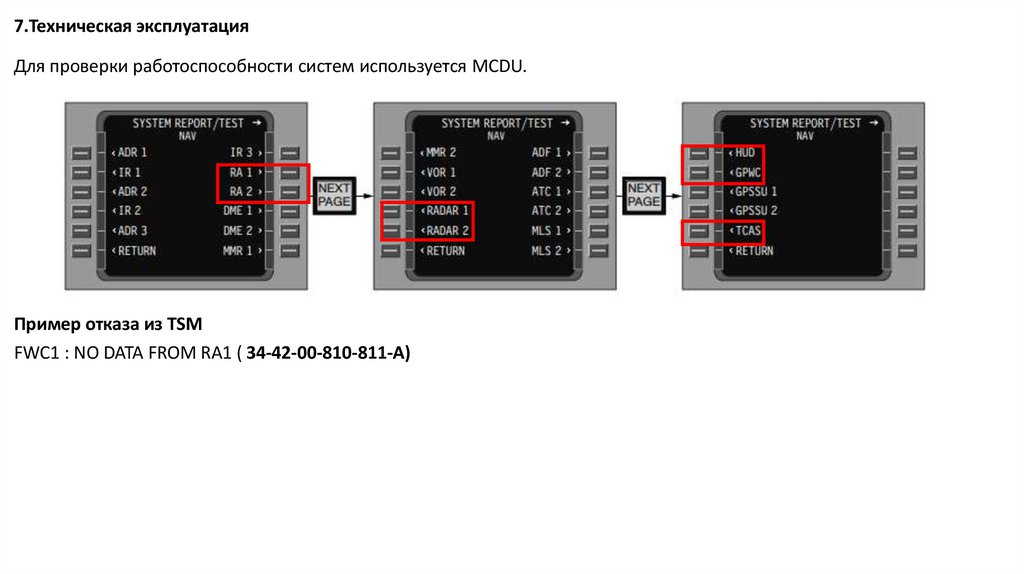
7.Техническая эксплуатацияДля проверки работоспособности систем используется MCDU.
Пример отказа из TSM
FWC1 : NO DATA FROM RA1 ( 34-42-00-810-811-А)
32.
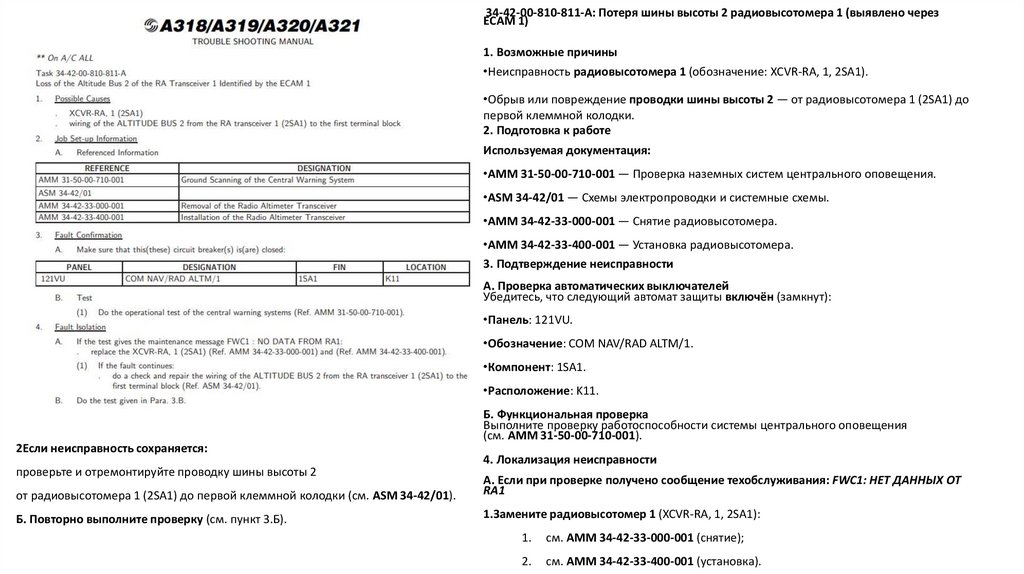
34-42-00-810-811-А: Потеря шины высоты 2 радиовысотомера 1 (выявлено черезECAM 1)
1. Возможные причины
•Неисправность радиовысотомера 1 (обозначение: XCVR-RA, 1, 2SA1).
•Обрыв или повреждение проводки шины высоты 2 — от радиовысотомера 1 (2SA1) до
первой клеммной колодки.
2. Подготовка к работе
Используемая документация:
•AMM 31-50-00-710-001 — Проверка наземных систем центрального оповещения.
•ASM 34-42/01 — Схемы электропроводки и системные схемы.
•AMM 34-42-33-000-001 — Снятие радиовысотомера.
•AMM 34-42-33-400-001 — Установка радиовысотомера.
3. Подтверждение неисправности
А. Проверка автоматических выключателей
Убедитесь, что следующий автомат защиты включён (замкнут):
•Панель: 121VU.
•Обозначение: COM NAV/RAD ALTM/1.
•Компонент: 1SA1.
•Расположение: K11.
2Если неисправность сохраняется:
проверьте и отремонтируйте проводку шины высоты 2
Б. Функциональная проверка
Выполните проверку работоспособности системы центрального оповещения
(см. AMM 31-50-00-710-001).
4. Локализация неисправности
от радиовысотомера 1 (2SA1) до первой клеммной колодки (см. ASM 34-42/01).
А. Если при проверке получено сообщение техобслуживания: FWC1: НЕТ ДАННЫХ ОТ
RА1
Б. Повторно выполните проверку (см. пункт 3.Б).
1.Замените радиовысотомер 1 (XCVR-RA, 1, 2SA1):
1.
см. AMM 34-42-33-000-001 (снятие);
2.
см. AMM 34-42-33-400-001 (установка).
33.
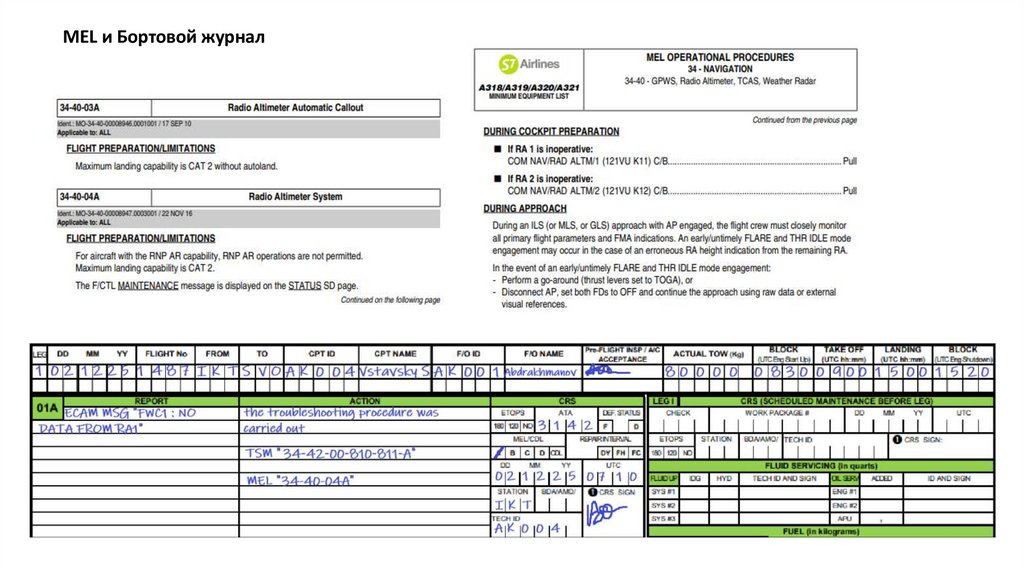
MEL и Бортовой журнал34.
8.Контроль знаний1)Отличается ли состав Автономного РНО А320 от RRJ-95?
a)Отличается
b)Не отличается
c)Зависит от модификации самолета (установкой EGPWS или T2CAS)
d)Зависит от модификации самолета (наличие PWS)
2)Как получить доступ к блоку приемопередачика метеолокатора на А320?
a)Через люк 811
b)Через люк 801
c)Через люк 813
d)Через люк 118
3) Для чего предназначен Переключатель PWS/OFF/AUTO на пульте управления метеолокатором А320?
a) включает функцию обнаружения земли(EARTH)
b) включает функцию обнаружения облаков(CLOUD)
c) включает функцию обнаружения противников (ПСК)
d) включает функцию обнаружения сдвига ветра (windshear)
4) Радиовысотомера A320 определяет высоту самолёта над подстилающей поверхностью во время?
a)Начального набора высоты
b)Захода на посадку
c)Посадки
d)Во время всех выше перечисленных этапов полета
5) Сколько режимов у EGPWS на самолете A320?
a)5 стандартных и 2 дополнительных
b) 7 стандартных и 2 дополнительных
c) 5 стандартных и 8 дополнительных
d) 2 стандартных и 5 дополнительных
35.
6) Какая сигнализация срабатывает в режиме 1 EGPWS: чрезмерная скорость снижения на А320?a) «WHOOP WHOOP»& «PULL UP»
b) «SINK RATE»& «PULL UP»
c) «GO AROUND»&«SINK RATE»
d) «PULL UP»& «OVERSPEED»
7) На A320 СЭИ, получая информацию от TCAS, может выдавать сигнализацию:
a)Только аварийную
b) Только предупреждающую
c) Аварийную и предупреждающую
d) Ни аварийную, ни предупреждающую
8) Система TCAS A320 предназначена для:
a) Предупреждения столкновений самолётов в воздухе
b) Предоставления информации о барометрической высоте
c) Предупреждения опасного сближения с метеообразованиями
d) Ведения радиосвязи между экипажем ВС и наземными службами
9)На сколько еще режимов делится режим 2 системы EGPWS A320?
a)На 8
b)На 6
c)На 2
d)На 5
10)
Что показывает индикатор представленный на рисунке?
a)Самое большое и самое малое значение высоты
b)Запас топлива
c)Напряжение генераторов
d)Температуру воздуха по шкале Фаренгейта
36.
КЛЮЧ1.С
2.А
3.D
4.D
5.A
6.B
7.B
8.A
9.С
10.A