








 Математика
МатематикаПохожие презентации:





")



")
Лекция 10. Математическое описание ЛС. Линейная непрерывная система и ее представления
1. ТЕМА 8. Линейная непрерывная система и ее представления
1.2.
3.
4.
Классификация элементов систем
Уравнения динамики и статики.
Понятие передаточной функции
Передаточные функции различных
соединений звеньев
5. Временные характеристики систем и их
элементов
2. 1 Классификация элементов систем
Системаавтоматического
управления
–
это
совокупность элементов, соединенных в замкнутый контур,
которые
функционируют
согласованно
и
подчинены
определенной форме управления.
По функциональному назначению:
Измерительные
Усилительно-преобразовательные
Исполнительные
Корректирующие
3.
По виду энергии, используемой для работы:Электрические
Механические
Гидравлические
Пневматические
Комбинированные
По характеру математического соответствия
между входным и выходным сигналами.
4.
При математическом описании элементы называютсязвеньями САУ.
Несмотря на многообразие различного рода элементов
(устройств) и независимо от физических принципов их работы,
поведение
каждого
из
них
может
быть
описано
дифференциальным уравнением, связывающим входную и
выходную переменные.
Элементы описываются, как правило, дифференциальными
уравнениями первого или второго порядка.
Рассматриваем одномерную модель с одним входом и
одним выходом, и обозначим входную величину звена через
u(t), а выходную через y(t).
При
рассмотрении
линейных
систем
статическая
характеристика y = f(t) любого звена может быть изображена
прямой линией.
5.
В позиционном (или усилительном) звене линейнойзависимостью y = Ku связаны входная и выходная величина в
установившемся режиме. K- коэффициент передачи или
коэффициент усиления звена.
В интегрирующих звеньях линейной зависимостью
dy
Ku
dt
y K udt
связаны производная выходной величины и входная
величина в установившемся режиме.
В
дифференцирующих
звеньях
линейной
зависимостью
du
y K
dt
связаны в установившемся режиме выходная величина и
производная входной величины
6.
ydy
dt
y
du
dt
a
u
б
u
в
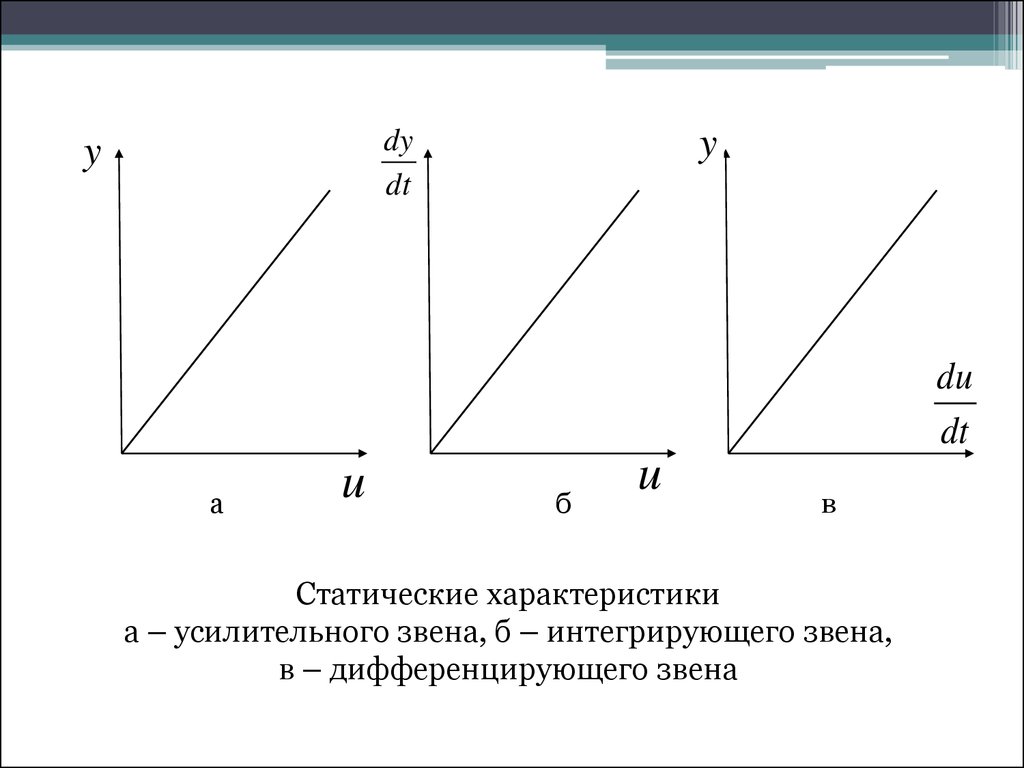
Статические характеристики
а – усилительного звена, б – интегрирующего звена,
в – дифференцирующего звена
7. 2 Уравнения динамики и статики
В общем случае линейная система описывается линейнымдифференциальным
уравнением,
представленным
в
стандартной форме
dn
d n 1 y
dy
d mu
du
an n an 1 n 1 ... a1 a0 y bm m ... b1 b0u.
dt
dt
dt
dt
dt
(1)
где t – текущее время;
n – порядок дифференциального уравнения; m ≥ n
u– входное воздействие (сигнал);
y- выходное воздействие(сигнал);
ai и bj - коэффициенты, определяемые параметрами
системы.
Если эти коэффициенты не зависят от времени, то система
называется стационарной.
8.
Дифференциальные уравнения называют уравнениямидинамики, они описывают переходные режимы в системах.
Переходной режим возникает при подаче на вход сигнала
(включение устройства) и существует до тех пор, пока на выходе
не устанавливается определенная величина сигнала .
Переходной процесс – это процесс изменения сигнала
y(t) на выходе от момента подачи входного сигнала u(t) до
установления процесса на выходе.
С математической точки зрения y(t) – решение
дифференциального уравнения.
Уравнение статики – уравнение установившегося режима,
когда все производные равны нулю.
9. 3 Понятие передаточной функции
В инженерной практике широко используется метод решениядифференциальных уравнений, основанный на интегральном
преобразовании Лапласа и позволяющий свести задачу к
алгебраическим действиям.
Для сигнала f(t) преобразование Лапласа
F (s)
f (t )e st dt ,
0
где s – оператор Лапласа
F(s) - называется изображением функции f(t)
10.
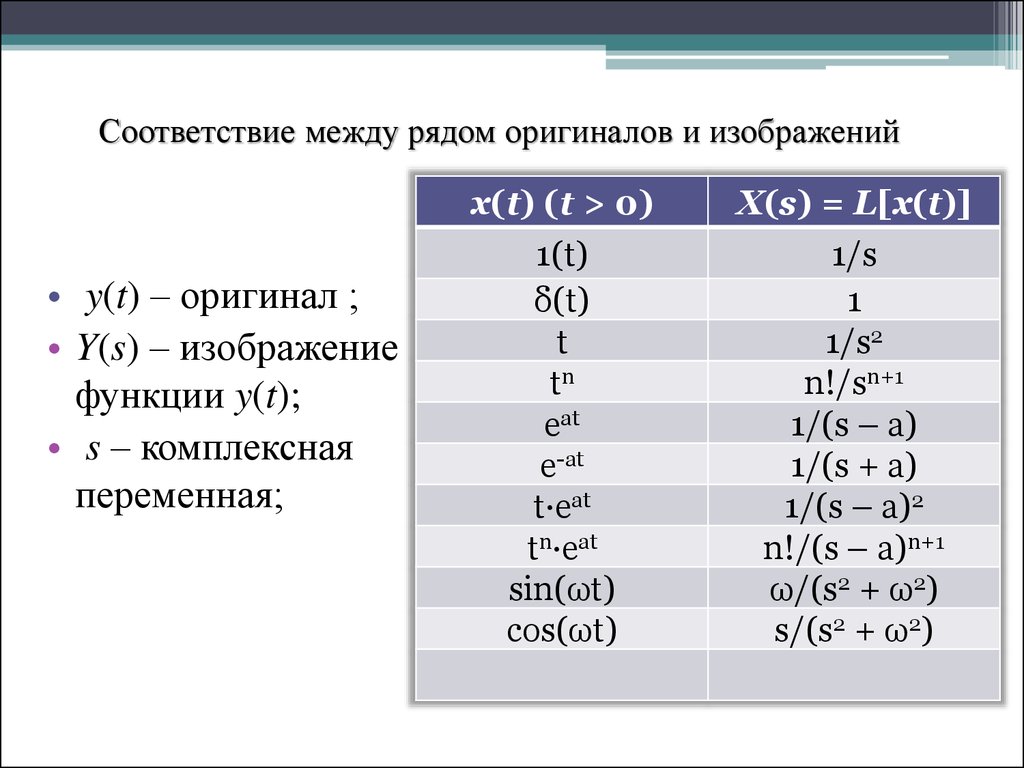
Соответствие между рядом оригиналов и изображений• y(t) – оригинал ;
• Y(s) – изображение
функции y(t);
• s – комплексная
переменная;
х(t) (t > 0)
1(t)
δ(t)
t
tn
eat
e-at
t·eat
tn·eat
sin(ωt)
cos(ωt)
Х(s) = L[х(t)]
1/s
1
1/s2
n!/sn+1
1/(s – a)
1/(s + a)
1/(s – a)2
n!/(s – a)n+1
ω/(s2 + ω2)
s/(s2 + ω2)
11.
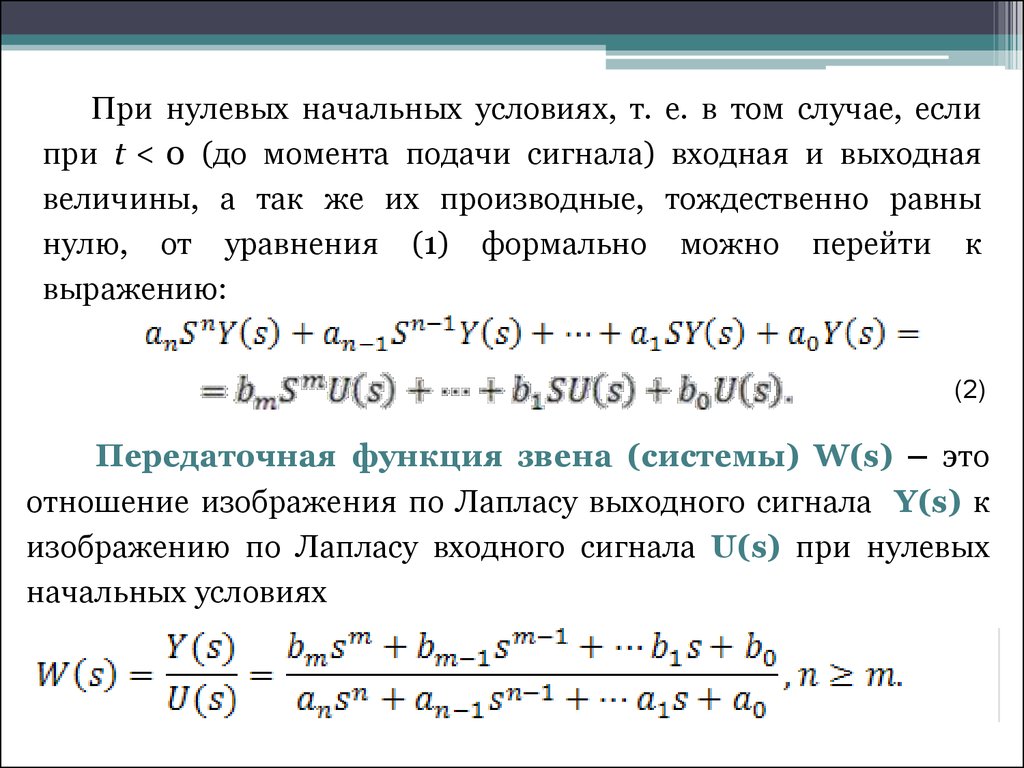
При нулевых начальных условиях, т.при t < 0 (до момента подачи сигнала)
величины, а так же их производные,
нулю, oт уравнения (1) формально
выражению:
е. в том случае, если
входная и выходная
тождественно равны
можно перейти к
(2)
Передаточная функция звена (системы) W(s) – это
отношение изображения по Лапласу выходного сигнала Y(s) к
изображению по Лапласу входного сигнала U(s) при нулевых
начальных условиях
12.
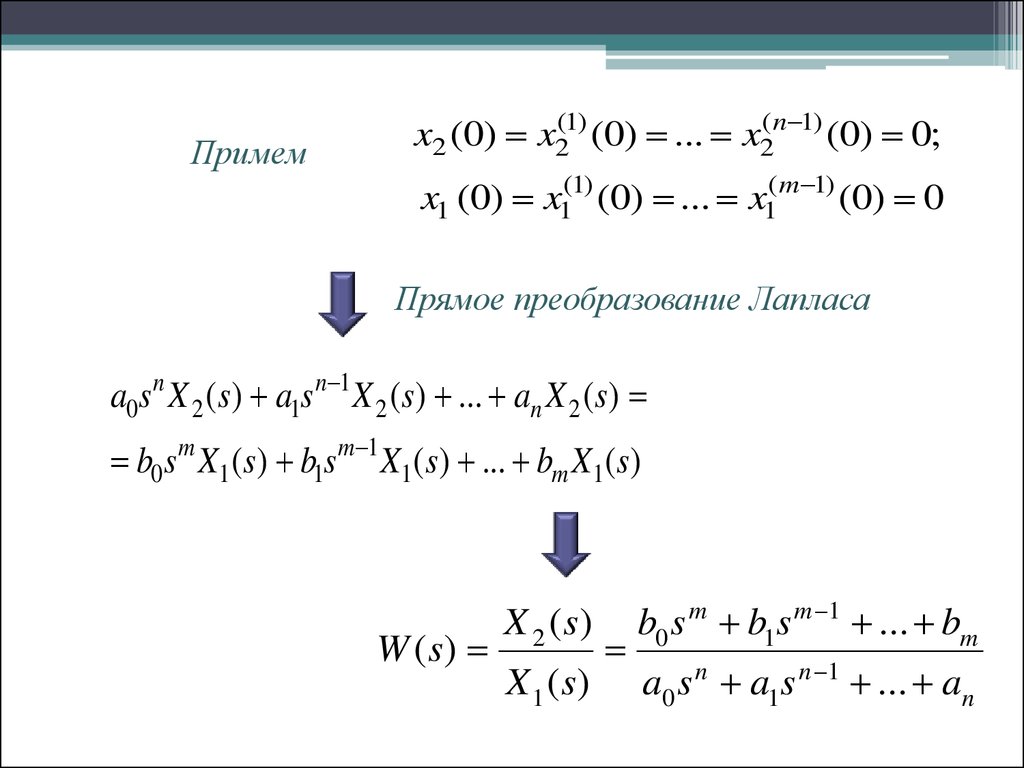
Примемx2 (0) x2(1) (0) ... x2( n 1) (0) 0;
x1 (0) x1(1) (0) ... x1( m 1) (0) 0
Прямое преобразование Лапласа
a0s n X 2 (s) a1s n 1 X 2 (s) ... an X 2 (s)
b0 s m X1(s) b1s m 1 X1(s) ... bm X1(s)
W ( s)
X 2 ( s)
X 1 ( s)
b0 s m b1s m 1 ... bm
a0 s n a1s n 1 ... an
13.
Передаточные функции звеньев имеют вид:- Позиционное или усилительное звено
-
Интегрирующее звено
=
-
Дифференцирующее звено
Передаточная функция – это одна из форм математических
моделей элементов.
14.
Передаточная функция элемента не зависит от того,какой функцией времени является его входное
воздействие.
Она зависит лишь от вида дифференциального
уравнения и от значений параметров элемента, которые
определяют коэффициенты уравнения.
Зная W(s) и U(S) можно найти Y(s) – изображение по
Лапласу выходного сигнала: Y(s)= W(s)*U(S), тогда можно
найти как обратное преобразование Лапласа:
15.
W(s) можно представить следующим образом:m
( s z 1 )( s z 2 ) ( s z m )
W ( s) K
K
( s p 1 )( s p 2 ) ( s p n )
(s z j )
j 1
n
,
(s p i )
i 1
где K – коэффициент усиления,
– нули системы, т. е. корни многочлена числителя,
– полюсы системы, т. е. корни многочлена знаменателя.
16.
Для описания моделей систем и действий над ними широкоиспользуется система MATLAB и пакет прикладных программ
Control System Toolbox.
В пакете введен класс объектов, называемый lti объекты –
линейные с постоянными параметрами. При создании lti
объекта ему присваивается имя.
- tf-форма, передаточная функция задается двумя
векторами строками, составленными из коэффициентов
многочленов числителя и знаменателя в порядке
убывания степеней s.
Например, оператор W = tf([2 1], [1 3 7]) создает объект W
подкласса tf, соответствующий передаточной функции
=
17.
zpk-форма нулей, полюсов и коэффициента усиления, вкоторой передаточная функция описывается двумя векторамистроками и одним числом, задающим нули, полюсы и
коэффициент усиления системы.
Например:
=
При отсутствии нулей на их место записывается знак пусто
[].
ss-форма
представляет
передаточную
параметрах пространства состояний.
функцию
в
18.
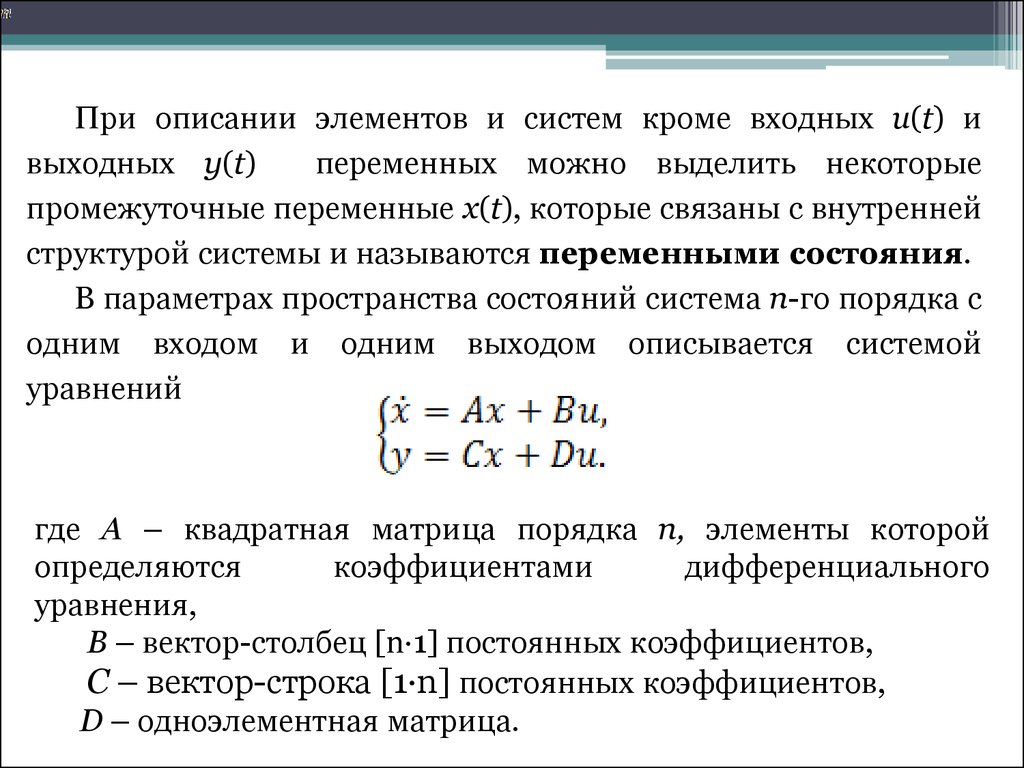
При описании элементов и систем кроме входных u(t) ивыходных y(t)
переменных можно выделить некоторые
промежуточные переменные x(t), которые связаны с внутренней
структурой системы и называются переменными состояния.
В параметрах пространства состояний система n-го порядка с
одним входом и одним выходом описывается системой
уравнений
где A – квадратная матрица порядка n, элементы которой
определяются
коэффициентами
дифференциального
уравнения,
B – вектор-столбец [n·1] постоянных коэффициентов,
C – вектор-строка [1·n] постоянных коэффициентов,
D – одноэлементная матрица.
19. 4 Передаточные функции различных соединений звеньев
При последовательном соединении звеньев с известнымипередаточными
функциями
W1(s),
W2(s)
,…,
Wn(s)
передаточные функции перемножаются:
х(t)
W1(s)
у1(t)
у(t)
W2(s)
Wэ(s)
Wэ(s) = W1(s)·W2(s)
20.
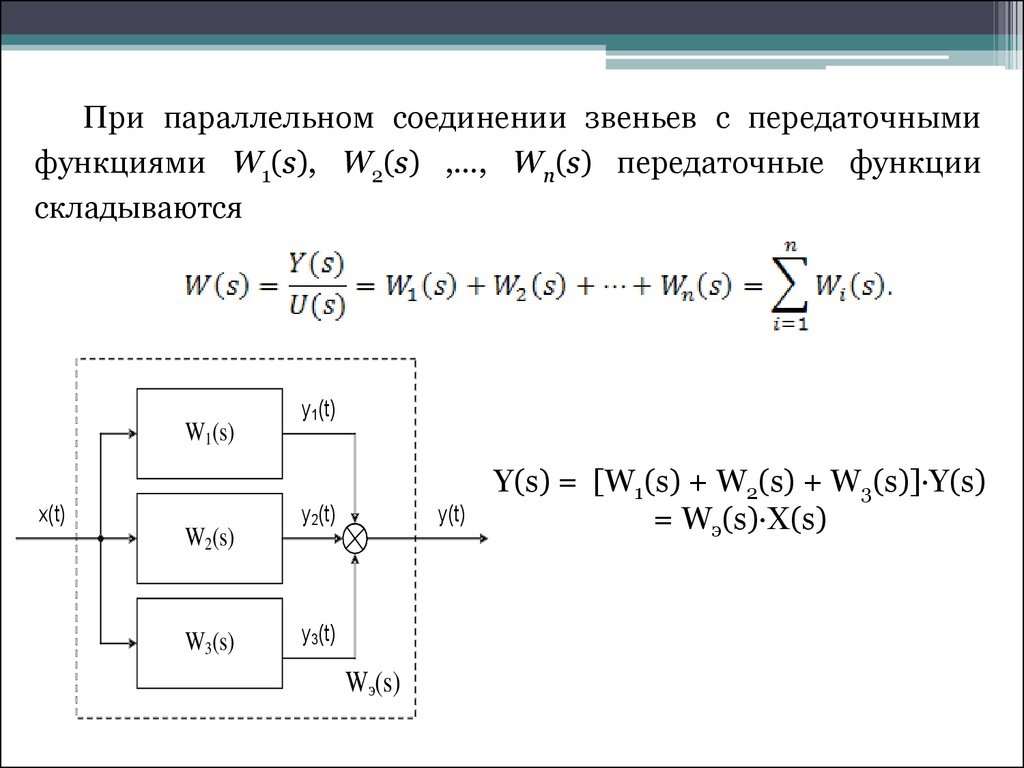
При параллельном соединении звеньев с передаточнымифункциями W1(s), W2(s) ,…, Wn(s) передаточные функции
складываются
W1(s)
х(t)
W2(s)
W3(s)
у1(t)
у2(t)
у(t)
у3(t)
Wэ(s)
Y(s) = [W1(s) + W2(s) + W3(s)]·Y(s)
= Wэ(s)·X(s)
21.
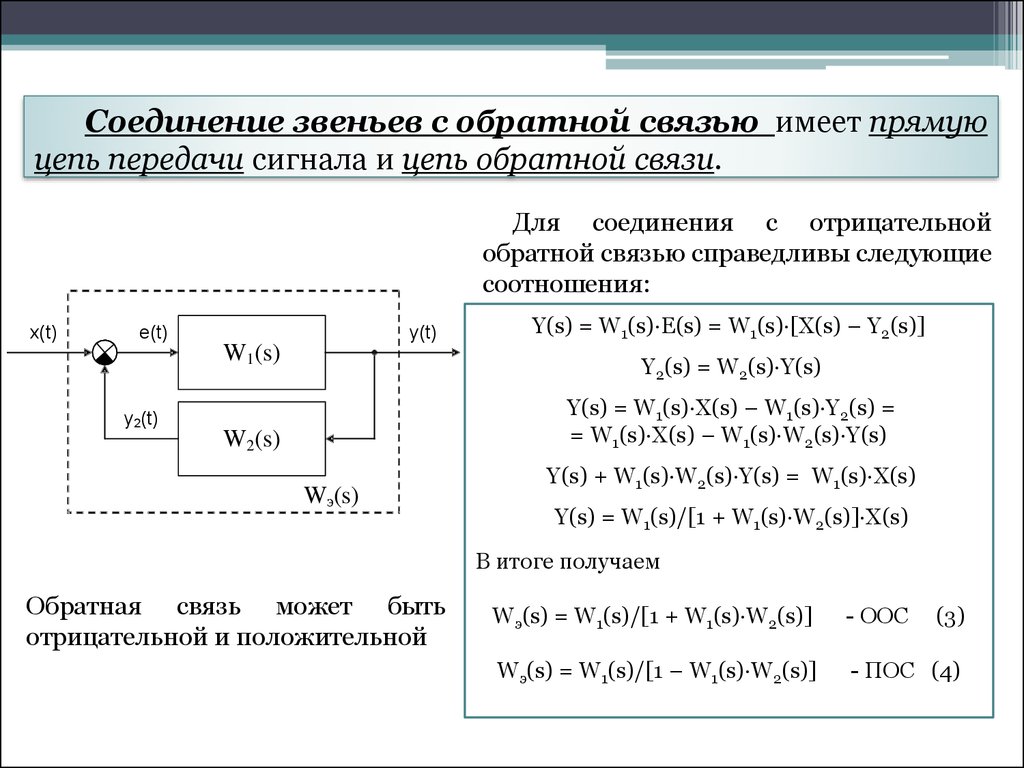
Соединение звеньев с обратной связью имеет прямуюцепь передачи сигнала и цепь обратной связи.
Для соединения с отрицательной
обратной связью справедливы следующие
соотношения:
х(t)
у(t)
e(t)
W1(s)
у2(t)
Y(s) = W1(s)·E(s) = W1(s)·[X(s) – Y2(s)]
Y2(s) = W2(s)·Y(s)
Y(s) = W1(s)·X(s) – W1(s)·Y2(s) =
= W1(s)·X(s) – W1(s)·W2(s)·Y(s)
W2(s)
Wэ(s)
Y(s) + W1(s)·W2(s)·Y(s) = W1(s)·X(s)
Y(s) = W1(s)/[1 + W1(s)·W2(s)]·X(s)
В итоге получаем
Обратная связь может быть
отрицательной и положительной
Wэ(s) = W1(s)/[1 + W1(s)·W2(s)]
- ООС
(3)
Wэ(s) = W1(s)/[1 – W1(s)·W2(s)]
- ПОС (4)
22. 5 Временные характеристики систем и их элементов
Типовые воздействияЕдиничное ступенчатое
воздействие
0 при t 0;
1 t
a0 при t 0.
Единичное импульсное воздействие,
(дельта – функция)
0 при t 0;
t
при t 0,
23.
Переходная функция h(t) – это функция, определяющаяизменение выходной величины системы (или отдельного
элемента) при воздействии на входе единичного ступенчатого
сигнала 1(t) при нулевых начальных условиях.
1(t)
h(t)
t
W(s)
1
L{1[t ]}
s
1 W ( s )
h(t ) x2 (t ) L
s
24.
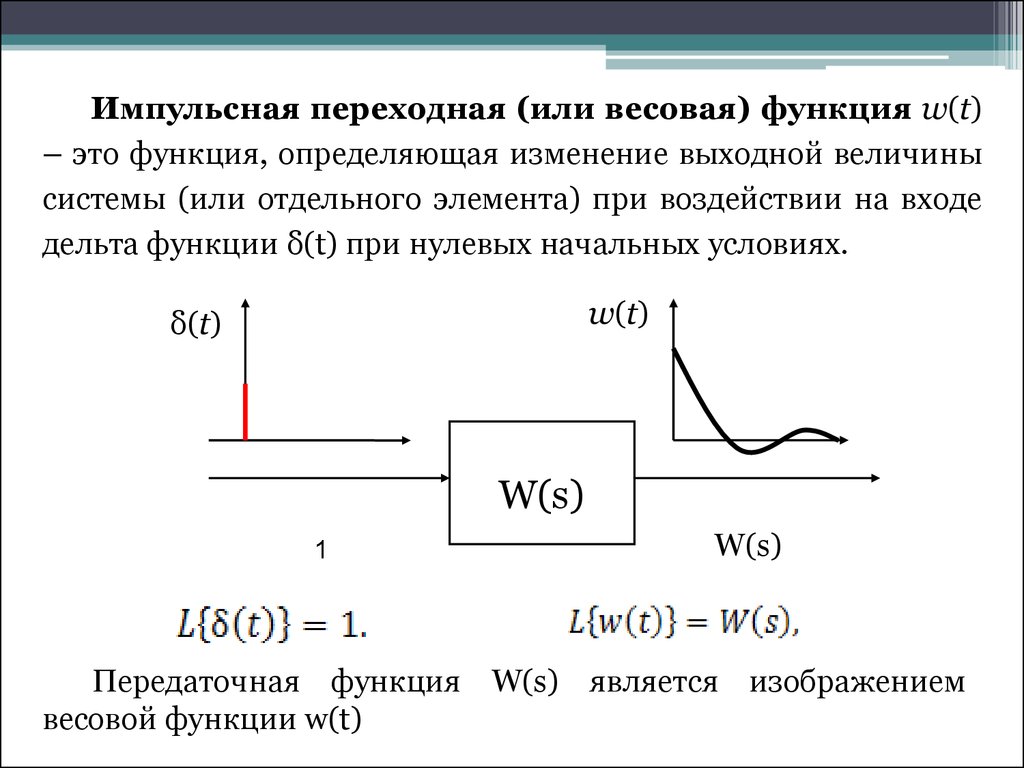
Импульсная переходная (или весовая) функция w(t)– это функция, определяющая изменение выходной величины
системы (или отдельного элемента) при воздействии на входе
дельта функции δ(t) при нулевых начальных условиях.
w(t)
δ(t)
W(s)
1
W(s)
Передаточная функция W(s) является изображением
весовой функции w(t)
25.
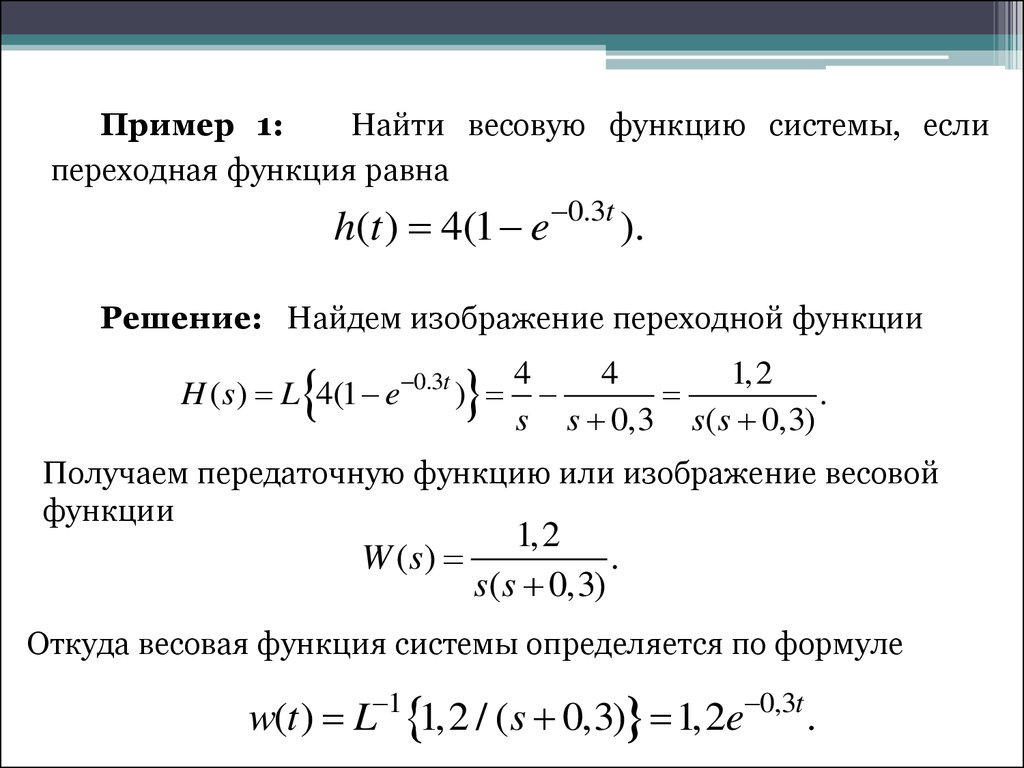
Пример 1:Найти весовую функцию системы, если
переходная функция равна
h(t ) 4(1 e
0.3t
).
Решение: Найдем изображение переходной функции
H ( s) L 4(1 e
0.3t
4
4
1,2
)
.
s s 0,3 s( s 0,3)
Получаем передаточную функцию или изображение весовой
функции
1,2
W ( s)
.
s(s 0,3)
Откуда весовая функция системы определяется по формуле
w(t ) L 1 1,2 / (s 0,3) 1,2e 0,3t .
26.
Пример 2. Определить передаточную, переходную ивесовую
функции
звена,
которое
описывается
дифференциальным уравнением
Решение:
Переходя в область изображений по Лапласу
найдем передаточную функцию
27.
Весовая или импульсная переходная характеристика:Переходная характеристика: