













 методом последовательного логарифмирования")
")
")































")








































")
")
 Математика
МатематикаПохожие презентации:








")

Методы определения динамических характеристик объектов по переходным функциям. (тема 4)
1. Тема 4. МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
СОДЕРЖАНИЕ ТЕМЫ:1. Аппроксимация переходной функции решением дифференциального
уравнения с простыми вещественными корнями
2. Аппроксимация переходной функции решением дифференциального
уравнения с простыми комплексными корнями
3. Определение коэффициентов передаточной функции методом
«ПЛОЩАДЕЙ»
4. Аппроксимация переходной функции решением дифференциального
уравнения второго порядка
5. Аппроксимация переходной функции решением дифференциального
уравнения первого порядка
6. Аппроксимация переходной функции решением дифференциального
уравнения первого порядка с запаздыванием
7. Аппроксимация переходной функции решением дифференциального
уравнения с кратными действительными корнями
8. Аппроксимация переходных функций объектов, содержащих
интегрирующие звенья
1
2. МЕТОДЫ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ ПО ПЕРЕХОДНЫМ ФУНКЦИЯМ
Основной признак классификации методов идентификациипо переходной функции это предположения о
структуре
аппроксимирующей
дифференциального уравнения.
W(s)
или
Под структурой дифференциального уравнения, или,
что одно и то же, передаточной функции, понимаются
число и расположение корней характеристического
уравнения или нулей и полюсов W(s).
Большинство методов идентификации
по переходной
функции можно классифицировать по используемому ими
математическому аппарату.
2
3.
Известно,что решение линейного дифференциального
уравнения с постоянными коэффициентами и нулевыми
начальными условиями существует и единственно.
Однако!!! утверждать обратное, т.е. что всякому
таблично
или
графически
заданному
решению
соответствует единственное линейное дифференциальное
уравнение - нельзя, особенно если под решением
подразумевается переходная функция h(t) промышленного
объекта.
В этом случае всегда осуществляется приближенная
аппроксимация h(t) решением дифференциального
уравнения, а следовательно, по одной и той же переходной
функции
можно
получать
разные!!! динамические
характеристики.
3
4. 1. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ ВЕЩЕСТВЕННЫМИ КОРНЯМИ
Метод последовательного логарифмирования.применим для аппроксимации гладких
неколебательных
переходных
функций
h(t),
представленных выражением
Этот
метод
n
h( t ) C 0 C i e
где C0
= h h(TУСТ);
i =1
αit
,
(3.14)
Ci постоянные коэффициенты;
i корни характеристического уравнения
(вещественные числа), причем i должны удовлетворять
неравенству:
4
5.
αα
i
< 0 ,5; i = 1, 2 , ..., n 1 .
(3.15)
i +1
Эти условия означают, что аппроксимирующая функция
W(s) имеет только вещественные простые полюсы,
расположенные на достаточно большом расстоянии друг от
друга по действительной оси.
Следовательно, при использовании рассматриваемых
методов идентификации требуется по таблично или
графически
заданной
переходной
функции
промышленного
объекта
определить
величины
коэффициентов Ci и корни характеристического уравнения i
при i = 1, 2, ..., п, а также порядок уравнения п.
5
6.
Идеяметода
приближении h(t)
заключается
в
последовательном
вначале решением уравнения первого
α t
порядка, т.е. функцией C e 1 , и если эта аппроксимация
1
неудовлетворительна
на отрезке времени [0, TУСТ], то
вводится в рассмотрение вторая составляющая т.е. порядок
аппроксимирующего уравнения принимается равным 2 и т.
i
Неизвестные
и
Ci
д.
определяются на каждом этапе
аппроксимации с помощью операции логарифмирования,
вследствие чего этот способ получил название метода
“последовательного логарифмирования”.
6
7.
Последовательностьдействий
применении следующая.
при
его
По условию (3.15) все корни i различны, поэтому скорость
убывания функций C e α i t также будет различной при
i
увеличении аргумента времени t.
Скорость убывания
определяется величиной
i
и так
α1t
как 1 самый малый из корней, то составляющая C e
1
- уменьшается медленнее всех прочих составляющих.
Поэтому можно предположить, что h(t) есть решение
линейного
дифференциального
уравнения
порядка и написать приближенное равенство:
7
первого
8.
h ( t ) C 0 C1eα1t
или
C 0 h(t ) = h1 (t ) C1e
Это соотношение верно при
больших
α1t
.
значениях времени
t, когда влиянием других составляющих можно пренебречь.
Прологарифмируем функцию |h1(t)| и получим уравнение
прямой линии в полулогарифмическом масштабе по оси
ординат
ln h1 (t ) lnC1 α1t.
Отсюда нетрудно определить величины 1 и C1 .
8
9.
= C0 h(t) и строитсяграфик ln |h1(t)| в зависимости от времени t .
К функции ln |h1(t)| проводится асимптота при t или
в конкретных условиях при больших значениях времени t .
Для этого вычисляется функция h1(t)
Асимптота отсекает на оси ординат некоторый отрезок,
равный ln C1.
Величина корня 1
асимптоты к оси абсцисс
равна
тангенсу
угла
наклона
lnC1
α1 =
,
t1
где t1 точка пересечения асимптоты с осью времени.
9
10.
Еслиh(t)
действительно
дифференциального уравнения
функция
является
решением
первого порядка, то
h2 ( t ) = h1 ( t ) C1e
α1t
равна нулю при всех, а не только больших значениях
времени t , т. е. асимптота совпадает со всей функцией.
В общем случае п 1, поэтому h2(t) 0 при малых
значениях t , и, зная теперь C1 и 1, можно найти функцию
αi t
h2(t), порождаемую неучетом влияния составляющих C e
и особенно медленно убывающей компоненты
10
C 2e
i
α 2t
.
11.
Можнопостроить
функцию
h2(t) на графике в
полулогарифмическом масштабе по оси ординат, для этого
следует провести к ней асимптоту и определить величины С2
и 2 .
Если асимптота не совпадает со всеми значениями ln h2 (t ) ,
то
порядок
аппроксимирующего
дифференциального
уравнения должен быть выше второго и надо найти
очередную функцию
«невязок»
h3 (t ) = h2 (t ) C 2 e
α 2t
и учесть влияние на h(t) следующей составляющей и т.
11
д.
12.
Процесс приближения h(t)выражением (3.14) прекращается тогда, когда функция hn(t) 0 с точностью
1 2% величины h(ТУСТ), причем значения ее будут
знакопеременными.
Сi
знакам соответствующих функций hi (t) .
Знаки переменных интегрирования
определяются по
Практика применения метода последовательного
логарифмирования
для
определения
динамических
характеристик по переходным функциям промышленных
объектов показала, что в подавляющем большинстве
случаев h(t) можно аппроксимировать суммой из двух
четырех экспонент.!!!
12
13.
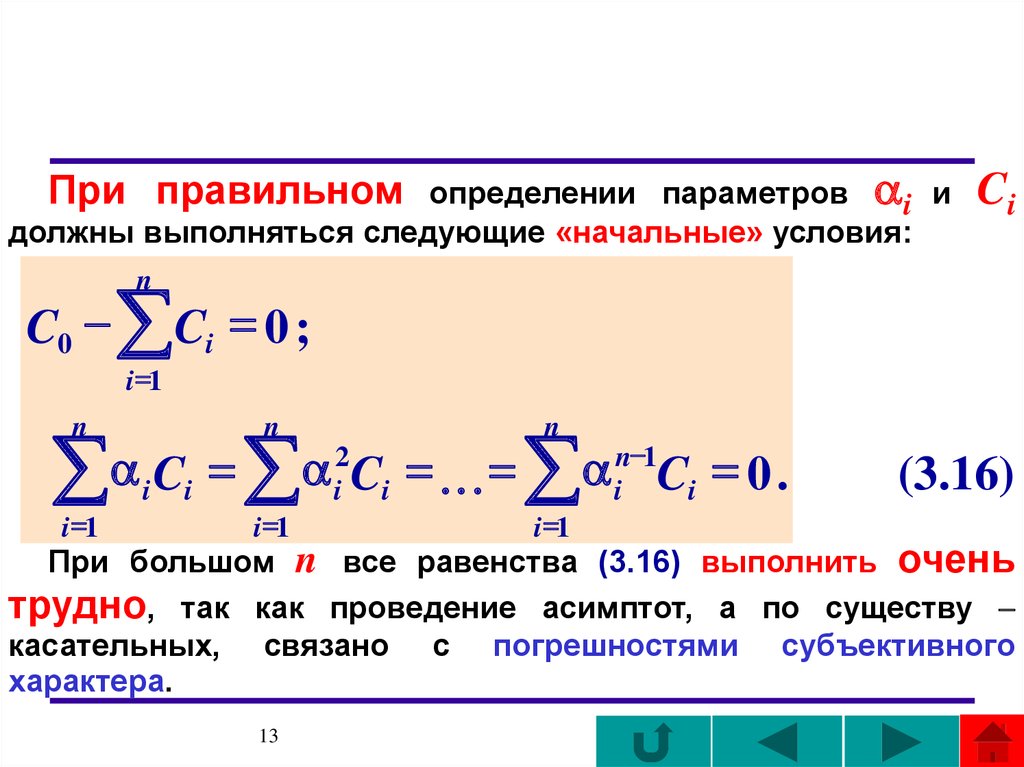
определении параметров i идолжны выполняться следующие «начальные» условия:
При правильном
C0
C = 0 ;
n
i
i =1
C = C = K =
n
i =1
Ci
n
i
i
i =1
n
2
i
i
i =1
n 1
i
Ci = 0 .
(3.16)
При большом n все равенства (3.16) выполнить очень
трудно, так как проведение асимптот, а по существу
касательных, связано с погрешностями субъективного
характера.
13
14.
Далее (согласно (2.9) ) получим передаточную функциюобъекта W(s), положив x(t) = A1(t), изображение которого
L{x(t)} = L{A1(t)} = X(s) = A/s:
H (s) =
s
=
W (s)
H (s) =
X (s)
A
n
C0
=
i =1
i
n
s
(s + )
i
i =1
14
s =
A
k
n
(T s + 1)
i =1
i
.
(3.17)
15.
Следует указать,что определение коэффициентов
Сi и
i осуществляется по переходной функции, из которой
выделено время чистого запаздывания , поэтому
корней
уже
динамические
свойства
передаточной функцией
W (s) =
объекта
k
n
(T s + 1)
i
i =1
15
будут
e
s
описываться
.
16. Достоинства и недостатки метода
Рассмотренныйметод
аппроксимации
h(t)
решением
линейного дифференциального уравнения достаточно прост
и позволяет получить аналитические выражения, весьма
удобные для последующих расчетов.
Основной недостаток
метода последовательного
логарифмирования заключается в неизбежном появлении
субъективных ошибок при проведении асимптот и, как
трудности точного определения Ci
удовлетворяющих «начальным условиям» (3.16) .
следствие этого, в
16
и
i ,
17. Пример.
Поясним изложенную методику примером определениякоэффициентов W(s) по гладкой переходной функции,
заданной равноотстоящими значениями
= 2 мин; i = 0, 1, ..., 21 (
Таблица 1
Время чистого запаздывания
3 мин.
h(ti) при ti ti 1 =
).
выделено
Коэффициент передачи объекта равен
заранее и равно
h(TУСТ) = h(42) =
=100.
График h(t) показан на рисунке ( Графики ).
17
18. Таблица 1. Данные для примера определения модели объекта
t i , мин0
2
4
6
8
10
12
14
16
18
20
h(ti),% 0,00
8,7
25,5
43,5
58,5
70,0
78,5
84,5
88,8
92,0
94,3
t i, мин
22
24
26
28
30
32
34
36
38
40
42
h(ti),% 95,9
97,0
97,9
98,5
98,9
99,2
99,4
99,6
99,7
99,9
100
18
19. Графики к примеру определения коэффициентов W(s) методом последовательного логарифмирования
x(t)1
А= 1
0
y (t)
100
90
80
70
60
50
40
30
20
10
Ä
0
t, мин
h ( ) h(ТУСТ)
h(t)
Б
График а)
А
2
4
6
8
ln| h i( t )|
2,0
1,8
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
10
12
14
16
18
20
a)
22
24
26
28
30
32
34
36
t, мин
40
38
График б)
ln| h 1( t )|
ln| h 2( t )|
II
I
0
2
4
9,0
19
6
8
10
12
14 16
30,6
18
б)
20
22
24
26
28
30
34
36
t, мин
38
20. График а)
x(t)1
А= 1
0
y(t)
t, мин
h( ) h(ТУСТ)
100
Б
90
h(t)
80
70
60
50
40
30
А
20
10
t, мин
0
2
4
6
8
Ä
20
10
12
14
16
18
20 22
a)
24
26
28
30
32
34
36
38
40
21. График б)
ln|hi(t)|2,0
1,8
ln|h1(t)|
1,6
1,4
ln|h2(t)|
1,2
1,0
0,8
0,6
II
I
0,4
0,2
t, мин
0
2
4
6
9,0
21
8
10 12 14 16 18 20 22 24 26 28 30
30,6
б)
34 36 38
22.
Величина С0 равна в данном случае h(42)= 100.
Вычтя из нее ординаты функции h(ti), найдем функцию
h1(ti) = C0 – h(ti), значения которой показаны в таблице 2 .
Там же приведены величины ln |h1(ti)|, а сама функция
ln |h1(ti)| изображена в полулогарифмическом масштабе на
рисунке ( График б) ).
Проведем к графику этой функции асимптоту I,
пересекающую ось ординат в точке 2,213 и ось абсцисс в точке
t1=30,6 мин.
ln C1 =2,213, откуда находим величины C1 и 1:
С1 = 163,3; 1 = ln C1/(0,434t1) =
= 163,3/0,434/30,6 = 0, 166.
Получим
22
23.
Вычислим функциюC1 e
α1t
= 163 ,3e
4, …, 42 мин и результаты занесем в
0 ,166 t
i при t
i
= 0, 2,
таблицу 2 .
Далее найдем функцию «невязок»
h2 (t i ) = h1 (t i ) 163,3e
0 ,166t
i
,
значения которой приведены также в таблице 2 .
Как видно из таблицы 2 , в интервале времени
α1t
аппроксимация h (t) выражением
1
C1 e
0 6 мин
= 163 ,3e
0 ,166 t
i
- неудовлетворительна, поэтому необходимо ввести в
рассмотрение второй член разложения выражения (3.14) .
23
24. Таблица 2. Результаты расчета для примера определения модели объекта
t i , мин0
2
4
6
8
10
12
14
16
18
20
|h 1|
100
91,3
74,5
56,5
41,5
30,0
21,5
15,5
11,2
8,0
5,7
ln| h 1|
2,00
1,96
1,872
1,75
1,618
1,477
1,33
1,191
1,04
0,903
0,78
117
84
60,3
C1e
1t 1633
|h 2|
63,3
25,7
9,5
8,8
ln| h 2|
1,801
1,41
0,977
0,58
t i , мин
22
24
26
28
30
32
34
36
38
40
42
|h 1|
4,1
3,0
2,1
1,5
1,1
0,8
0,6
0,4
0,3
0,1
0,0
ln| h 1|
0,613
1,0
0,477 0,321 0,176 0,041 0,097 0,22 0,398 0,52
24
25.
На рисунке ( График б) ) построена функцияt ,
t2 = 9,0 мин и ось
ln | h2(t)| и к ней
проведена асимптота при
которая пересекает ось
абсцисс в точке
ординат в точке
ln С2=
= 1,766.
1,766 =
=
0,452.
Из графика имеем: С2 = 63,24 и α 2
0, 434 9
Учитывая отрицательный знак функции h2(t), получаем С2 =
= 63,24.
Из графика б) видно, что асимптота достаточно хорошо
совпадает с функцией ln |h2(t)|, поэтому можно принять п = 2
и записать аналитическое решение дифференциального
уравнения:
25
26.
(h(t ) = 100 1 163,3e
0,166t
i
+ 0,6624e
0, 452t
i
)..
Проведем проверку «начальных условий» согласно (3.16) :
h(0)=C0 C1 С2 = 100 163,3 + 63,24 = 0,06;
h(0) = 1C1+ 2C2 = 0,166 163,3 0,452 63,24 = 1,35.
Относительная ошибка невелика (менее 2%), поэтому
уточнения величин i и Ci делать нет необходимости.
Однако для контроля вычислим несколько значений h(t) по
аппроксимирующему выражению при t = 2 мин, t = 6 мин и t
= 20 мин.
Получим соответственно: h(2)= 8,5; h(6) = 43,9; h(20) = 94,11.
Ординаты экспериментальной функции h(t) при этих же
значениях времени равны 8,7; 43,5 и 94,3.
26
27.
Вывод.Достигнутая точность приближения математического
описания переходной функции h(t) в виде суммы двух
экспонент
составила
динамические
свойства
передаточной функцией:
менее
0,5%,
объекта
можно
3 s
поэтому
описать
100
e
W (s) =
.
(6,03s + 1)(2,22 s + 1)
27
28. 2. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПРОСТЫМИ КОМПЛЕКСНЫМИ КОРНЯМИ
Этот метод аппроксимации применяют в тех случаях, когдапереходная функция имеет колебательный характер.
Поэтому можно предположить, что динамические свойства
промышленного
объекта
описываются
передаточной
функцией, не имеющей нулей и обладающей несколькими
парами простых комплексных полюсов.
Здесь также используется
приближения
идея последовательного
h(t) решением линейного дифференциального
уравнения, поэтому предполагается, что отрицательные
вещественные части полюсов аппроксимирующей
отличаются друг от друга примерно в 1,5
28
2 раза.
W(s)
29.
Последовательность действий нахождения коэффициентовW(s) такова.
Из переходной функции h(t) ( График ) выделяется время
чистого запаздывания и затем определяется функция
h1(t) = C0 h(t), которая разлагается в ряд
n
h1 ( t )
Cie
i =1
α it
sin ( β t + ),
i
i
(3.18)
где i вещественная часть, a i коэффициент при
мнимой
части
комплексного
корня si = i + j i
характеристического многочлена линейного дифференциального
уравнения (ДУ) (2.2) ; i
- фазовый сдвиг в
экстремальных точках функции h(t); С0 = h( ) h(TУСТ) .
29
30. Переходная функция колебательного объекта
x(t)А
0
y(t)
t
Ti+1/2
Ti+1/2
Ti /2
Ti /2
h ( ) h ( Т УСТ )
C0
h(t)
0
τ
t01
30
tm1
t02
tm2
t01
tm1
t02
tm2
t03
tm3
t
31.
Какуже
отмечалось,
метод
логарифмирования
дает
хорошие
выполняется условие
последовательного
результаты,
если
αi
< 0 ,5; i = 1, 2 , K , n 1 .
αi + 1
Полагая временно
n = 1
и учитывая, что величина
наименьшая из всех корней i , напишем соотношение
h1 (t ) C1e
α1t
-
sin (β t + ),
1
которое обращается в равенство при t , и при
определению подлежат коэффициенты C1, 1, 1, 1.
31
1
1
этом
32.
Величина i находится достаточно просто, если известенпериод T1 колебаний h1(t) , так как 1 = 2 /T1.
В точках t0g ; g = 0, 1, 2, ..., в которых функция h1(t)
проходит через нуль, справедливо равенство
sin ( 1t0g + 1) = 0,
что позволяет найти 1 = 1t0g + g ; g = 0, 1, 2, ...
График .
В точках tэg при g = 0, 1, 2, ... колебания h1(t) достигают
экстремумов (в точках t0g график функции h1(t) проходит
через нуль, а в точках tmg - через максимумы кривой) и,
следовательно, можно написать, что
sin ( 1tэg + 1) = ( 1)g .
32
33.
Для значений времени t= tэg
справедливо равенство
h1 ( t эg ) = C 0 h ( t эg ) C 1 e
1t эg
,
или после логарифмирования получим
ln |h1(tэg)| ln C1 1tэg.
Построив
значения
в
полулогарифмическом
функции
способом C1 и 1.
33
|h1(tэg)|,
определим
масштабе
известным
34.
Далее вычисляется функция «невязки» h2(tэg):h2 (t ) = h1 (t ) C1e
α1t
sin (β1t + 1 ),
учитывающая влияние других составляющих ряда (3.18) на
форму h(t) .
Наиболее медленно затухающей функцией будет
α 2t
C 2e
sin ( β t + )
2
2
так как величина 2 наименьшая из всех корней i; i = 2,
3, ..., п.
Поэтому полагаем n
= 2 и получим:
α2t
h2 (t ) C2 e
34
sin (β t + ).
2
2
35.
Коэффициенты С2, 2, 2, 2 определяются приемами,которые использовались для определения С1, 1, 1, 1 .
Процесс последовательного приближения h(t) решением
дифференциального уравнения с простыми комплексными
корнями продолжается до тех пор, пока очередная функция
«невязки» hi (t) не станет близка к нулю.
После аппроксимации h(t) рядом (3.18) находится
преобразование Лапласа Н(s) по формуле
cos i + ( s + α i ) sin i
C0
+
H (s) =
Ci
.
2
2
s
(s +αi ) + i
i =1
n
35
36.
Далее записывается уравнение передаточной функцииH (s)s
W (s) =
.
A
Если коэффициенты
Ci , i , i , i
найдены достаточно
точно, то должны выполняться следующие
п «начальных
условий»:
n
h( 0 ) =
i =1
36
C i sin i + C 0 = 0;
37.
nh&(0) =
C ( α sin + cos ) = 0;
i
i
i
i
i
i =1
h&&( 0 ) =
= C i [( α i β i ) sin i 2 α i β i cos i ]= 0
n
2
2
и т.д .
i 1
Определение некоторых коэффициентов опирается на
знание периода колебаний функции h(t), который находится
непосредственно из графика переходной функции.
Для этого необходимо, чтобы переходная функция имела
несколько (не менее двух или трех) периодов колебаний, что
бывает довольно трудно получить при исследовании
динамики промышленных объектов.
37
38.
Вывод.Если достигнута требуемая точность приближения
математического описания рассматриваемой переходной
функции h(t), то динамические свойства объекта можно
описать передаточной функцией вида
k
W (s) =
2
a2 s + a1 s + 1
с простыми комплексными корнями характеристического
уравнения (полинома знаменателя).
38
39. 3. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ МЕТОДОМ «ПЛОЩАДЕЙ»
Пусть требуется по таблично или графически заданнойпереходной функции
определить коэффициенты
при
так же число
h(t)
i = l, 2, 3, ..., n, а
передаточной функции, для которой
полинома знаменателя
W(s), определяемой по формуле
W (s) =
=
i
bi s i + 1
1
.
n
= a s
i
i
1
i
+1
и
bi
n аппроксимирующей
n является порядком
n
39
ai
40.
Некоторые из коэффициентовbп, bn 1, bп 2, …
могут
быть равны нулю, так что всегда порядок числителя W(s)
меньше или равен порядку знаменателя.
При рассмотрении данного метода будем использовать
обратную передаточную функцию W 1(s), определяемую
выражением
n
W
1
1 =
(s) =
W (s)
i =1
n
i =1
40
ai s i + 1
.
bi s i + 1
(3.19)
41.
Суть метода заключается в разложении функцииn
1
W (s) = 1 +
a s
i =1
в
«усеченный» ряд
i
(3.20)
i
по степеням
s
последующем определении коэффициентов
s 0
и
и порядка
п
при
ai
путем последовательного приближения h0(t) решениями
линейного дифференциального уравнения первого порядка.
Коэффициент a1 находится из следующих соображений.
Вычислим площадь
41
под кривой C0 h0(t) = k h0(t):
42.
st0
0
=
=
=
S1 [k h (t )]dt lim
e [k h (t )]dt lim
L {k h },
0
s
0
L{k h0}
[k h(t)] .
где
0
s
0
0
преобразованная по Лапласу
функция
В то же время имеем:
n
1
ai s
i 1
W ( s) 1 k i = 1
k
k
=
=
L { k h } = 1
k.
1
1
s W ( s) s
W ( s) s
W ( s)
0
42
43.
Предел последнего выражения при s 0поэтому получаем S1 = ka 1 .
равен
k a1
,
Введем аппроксимирующую переходную функцию h1(t), для
которой передаточная функция определяется выражением
a1 s + 1
W ( s) =
.
k
1
1
Преобразование Лапласа функции
h1(t) имеет вид:
k
1
H1 (s) =
.
a1s + 1 s
43
44.
Используя выражение дляфункции
«невязок» :
H1(s),
найдем изображение
n
1
ai s
i 1
i =2
W (s) a1s 1 k
=k
L{h1 (t) h (t )} =
.
1
1
(a1s +1)W (s) s
(a1s +1)W (s)
0
44
45.
Площадь«второго порядка» равна:
t
S2 =
0
1
0
0
=
[h1 (t ) h (t )]dtdt lim L{h1 (t ) h (t )} = ka2 ,
s 0 s
0
так как функция
n
ai s
i 2
i=2
1
0
L { h1 ( t ) h ( t )} = k
s
( a 1 s + 1)W
стремится при s 0 к величине
45
ka 2 .
1
(s)
46.
Далее вводится переходная функциянаходится
a 3 и т.д.
h2(t),
по аналогии
В общем случае получаем зависимость для определения
коэффициентов разложения a ; i = l, 2, ..., п:
t
Si =
i
t
L
[ hi 1 ( t ) h 0 ( t )] dt i = ka i ; i = 1, 2 , ..., n ,
0 0
0
1
424
3
i раз
h0( ) = k = h0(TУСТ)
воздействии х(t) = 1.
где
46
при единичном входном
47.
Практическоеиспользование
затрудняется как сложностью
появлением
накапливающихся
последнего
выражения
вычисления Si , так и
ошибок
при
неточном
определении ординат hi (t) и приближенном интегрировании.
Поэтому величины Si обычно определяются по формуле
i 2
( χ )i
(
χ
)
+
+
Si = S1i [ k h 0 ( t )]
( i 1)!
(i 2 )!
0
где
c= t =
S1
t
g =0
[ k h 0 (t )]
47
.
i 3
g
=0
Si 1 g ( χ ) g
i 1 g
g!
S
1
dχ ,
48.
В частности, приn = 2 имеем:
S2
= S 12
0
[ k h ( t )] ( 1 χ ) d χ ,
0
а при n
= 3 получаем:
2
χ
0
3
d χ .
=
S 3 S1 [ k h (t )] 1 2 χ +
2
0
48
49.
Коэффициенты исходной передаточной функции (3.19)связаны с величинами
соотношением
a i или, точнее, с «площадями» Si
i 1
Si g
Si
ai = bi + bg
; i = 1, 2, K, 2n,
k
k
g =1
(3.21)
i = n, п 1, ...
и всегда bi , аi при i = n + l, n + 2, ..., 2n равны нулю.
где некоторые bi при
49
50. Некоторые рекомендации при использовании метода «площадей»
В общем случае при определении коэффициентов W(s)методом «площадей» не накладывается особых ограничений
на порядки числителя и знаменателя, однако разложение
функции (3.20) может расходиться, что чаще всего имеет место
&(+0) 0 и т . д.
при h(+0) 0, h
Для улучшения сходимости процесса следует заранее
полагать:
bn = 0; bn-1 0, если h(+0) = 0, но h&(+0) 0 ;
bn = bn-1 = 0, если h(+0) = 0; h&( +0) = 0 ;
при
&&( + 0 ) 0 ; можно
h ( + 0 ) = h& ( + 0 ) = 0 ; h
bn = bn 1 = b n 2 = … = b1 = 0.
50
принимать
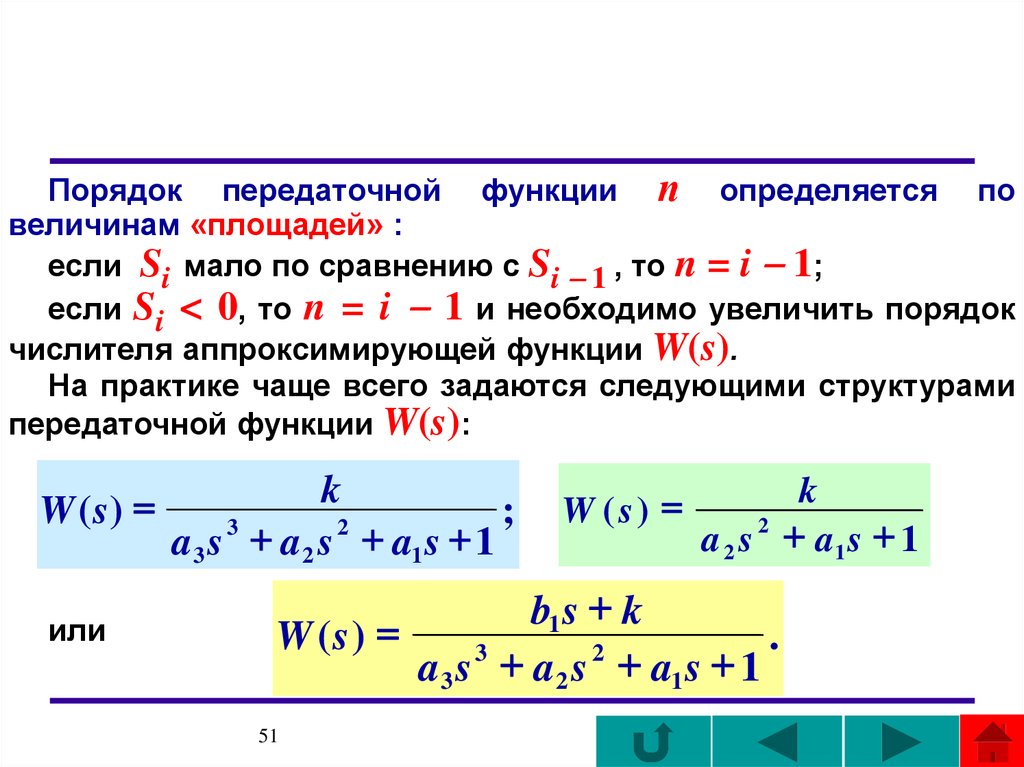
51.
Порядок передаточной функции п определяется повеличинам «площадей» :
если Si мало по сравнению с Si 1 , то n = i 1;
если Si < 0, то n = i 1 и необходимо увеличить порядок
числителя аппроксимирующей функции W(s).
На практике чаще всего задаются следующими структурами
передаточной функции W(s):
W ( s) =
или
k
;
3
2
a3 s + a 2 s + a1 s + 1
W (s) =
k
a 2 s 2 + a1 s + 1
b1 s + k
W (s) =
.
3
2
a3 s + a 2 s + a1 s + 1
51
52.
Метод «площадей» не связан с графическими построениямии может быть применен для определения динамических
характеристик
по
недостаточно
гладким
переходным
функциям.
В этом случае требуется осуществить сглаживание лишь
начального и конечного участков h(t), так как именно по ним
определяются порядок W(s) и величина k.
Процесс вычисления Si и решения системы линейных
алгебраических уравнений (3.21) легко алгоритмизируется
применительно к счету на компьютерах.
Для n < 2 3 определение коэффициентов W(s) может
быть проведено и вручную, хотя затраты времени на это в
несколько раз больше, чем при использовании метода
последовательного логарифмирования.
52
53. Пример.
Рассмотримпример
определения
коэффициентов
передаточной функции (3.19)
методом «площадей» по
переходной функции, заданной таблицей 1и изображенной на
рисунке (
) - данные
предыдущего примера.
график
б)
По виду h(t) можно предположить, что h(+0) = 0; h&( +0) = 0 ;
h&&(+0) 0, и поэтому порядок числителя передаточной функции
принимается равным нулю.
Для
удобства
вычисления
«площадей»
произведем
h(t ) и воздействия
h (t ) =
h(TУСТ)
х(t) = A/A = 1/1 = 1, т.е. x(t) = 1(t).
нормировку переходной функции
53
0
54.
Затемодним
из
известных
интегрирования находим величину
методов
численного
42
0
=
S1
[1 h (t )] dt = 8,357 мин .
0
В нашем примере S1 вычислялось по формуле Симпсона с
помощью компьютера.
Произведем изменение масштаба времени c
= t /8,357.
При 0 t 42 получим 0 c 5,025.
Далее
по
приведенным выше формулам находим
15,631 мин и S3 < 0.
54
S2 =
55.
Так как ни по виду начального участка h(t), ни из анализафизических процессов, происходящих в исследуемом объекте,
не следует, что надо увеличивать порядок числителя
передаточной
функции,
то
прекращаем
вычисление
«площадей» и находим коэффициенты
a1 = S1 = 8,357 мин; a 2 = S2 = 15,631 мин.
Здесь k = 1; a1 и a
2 коэффициенты нормированной
передаточной функции
W (s) =
k
1
=
,
2
2
a2 s + a1 s + 1 15,631s + 8,357 s + 1
55
56.
Переходим от нормированной передаточной функции кобычной функции W(s):
h(TУСТ)
100
=
=
W ( s) W ( s)
2
A
15,631s + 8,357 s + 1
или с учетом заранее выделенного запаздывания
получим
3 s
100
e
W (s) =
.
2
15,631s + 8,357 s + 1
56
= 3 мин
57.
Выводы к примеру.Значения
функции
y(t),
дифференциального уравнения
являющейся
решением
15,631 &y&(t ) + 8,357 y& (t ) + y (t ) = 100 x(t 3)
при нулевых начальных условиях и когда
и
х(t) = 0
при
t < 0
x(t) = 1 при t > 0
с приемлемой для практики точностью
совпадают со значениями h(t), приведенными в таблице 1 .
Относительная ошибка не превышает долей процента.
57
58. 4. АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ФУНКЦИИ РЕШЕНИЕМ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ВТОРОГО ПОРЯДКА
При использовании данного метода предполагается, чтодинамические свойства промышленного объекта приближенно
описываются передаточной функцией следующего вида:
s τ
ke
k
W(s) =
или W(s) =
,
+1)(T2 s +1)
+1)(T2 s +1)
(
T
s
(
T
s
1
1
где время чистого запаздывания;
k коэффициент усиления объекта;
Т1 и T2 коэффициенты (параметры
называемые постоянными времени.
58
(3.22)
объекта),
59.
Следовательно переходная функция объектабыть
аппроксимирована
решением
дифференциального уравнения второго порядка
t
t
T1
T2
T1
T2
h(t) = h( ) 1
e +
e
T
T
T
T2
1
2
1
T1
h(t ) = h( ) 1
e
T1 T2
t
T1
59
;
t
T2
T2
+
e
T1 T2
должна
линейного
h(t)
(3.23)
; t .
60.
Так как время чистого запаздывания и коэффициентусиления k определяются обычными приемами по переходной
функции, то во всех методах, которые будут рассматриваться
далее, ставится задача нахождения Т1 и Т2.
Совершенно понятно,
что далеко не все переходные
функции можно аппроксимировать подобными выражениями с
приемлемой точностью.
Вместе с тем большой опыт автоматизации различных
промышленных объектов показывает, что весьма часто их
динамические свойства «в малом» можно описать в первом
приближении выражениями типа (3.22) , достаточно удобными
для
выполнения вручную
расчетов систем
автоматического регулирования.
60
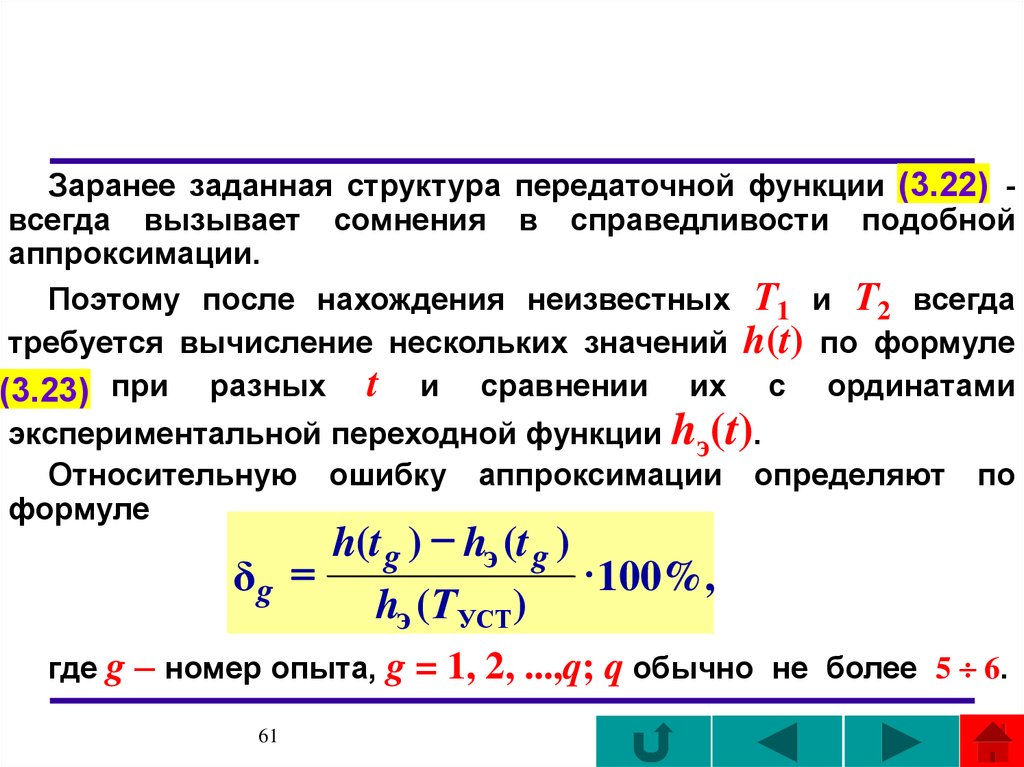
61.
Заранее заданная структура передаточной функции (3.22) всегда вызывает сомнения в справедливости подобнойаппроксимации.
Поэтому после нахождения неизвестных Т1 и Т2 всегда
требуется вычисление нескольких значений h(t) по формуле
(3.23) при разных t и сравнении их с ординатами
экспериментальной переходной функции hэ(t).
Относительную ошибку аппроксимации определяют
формуле
h(t g ) hэ (t g )
δg =
где g
hэ (Т УСТ)
по
100%,
– номер опыта, g = 1, 2, ...,q; q обычно не более 5 6.
61
62.
Если величина g не превышает 2 3%, то можно считатьдопустимой аппроксимацию динамических свойств данного
промышленного объекта передаточной функцией (3.22) .
Определение постоянных времени объекта T1 и T2
может осуществляться:
с помощью графических
построений;
интерполяционными методами;
аппроксимацией переходной функции асимптотами.
Рассмотрим наиболее распространенные методы для
определения коэффициентов дифференциального уравнения
второго порядка по переходной функции объекта.
62
63. 4.1. Определение постоянных времени объекта T1 и T2 с помощью графических построений
Методика определения параметров объекта.Исходная переходная функция нормируется путем деления
на величину h(TУСТ) h :
h(t )
h (t ) =
.
h(TУСТ )
0
На графике а) переходной функции h0(t) определяется
точка перегиба , через которую проводится касательная до
пересечения с осью абсцисс и линией h(TУСТ) Ak или
просто h(TУСТ) = k, если мы имеем дело с единичной
переходной функцией.
Под точкой перегиба здесь понимается такая точка
переходной функции h(t), в которой производная dh(t)/dt
имеет максимальное значение.
63
64. Определение коэффициентов дифференциального уравнения второго порядка с помощью графических построений
h 0 (t )Tc
Tf
h ( )
1
B A
a
3
2
0
1
Tb
t
t
Ta
64
а)
65. График б)
Th 0 (t )
h ( )
Tc
1
t
0
t
Ta
Tu
65
б)
66.
Так как переходные функции многих промышленныхобъектов не имеют явно выраженной точки перегиба, то
определение ее координат надо осуществлять следующим
образом.
В средней, наиболее быстро изменяющейся части графика
берется несколько ординат h(tg) = hg; g = 0, 1, 2, ..., q;
q обычно не более 6 7 с интервалом t = tg tg-1 = const
и вычисляются первые разности
hg = hg hg 1; g = 0, 1, 2, ..., q 1.
Далее
находятся
максимальная
соответствующее ей значение времени
наконец, ордината
h0(t).
66
величина
hg
t = tg 0,5 t
и
и,
h , через которую проводят касательную к
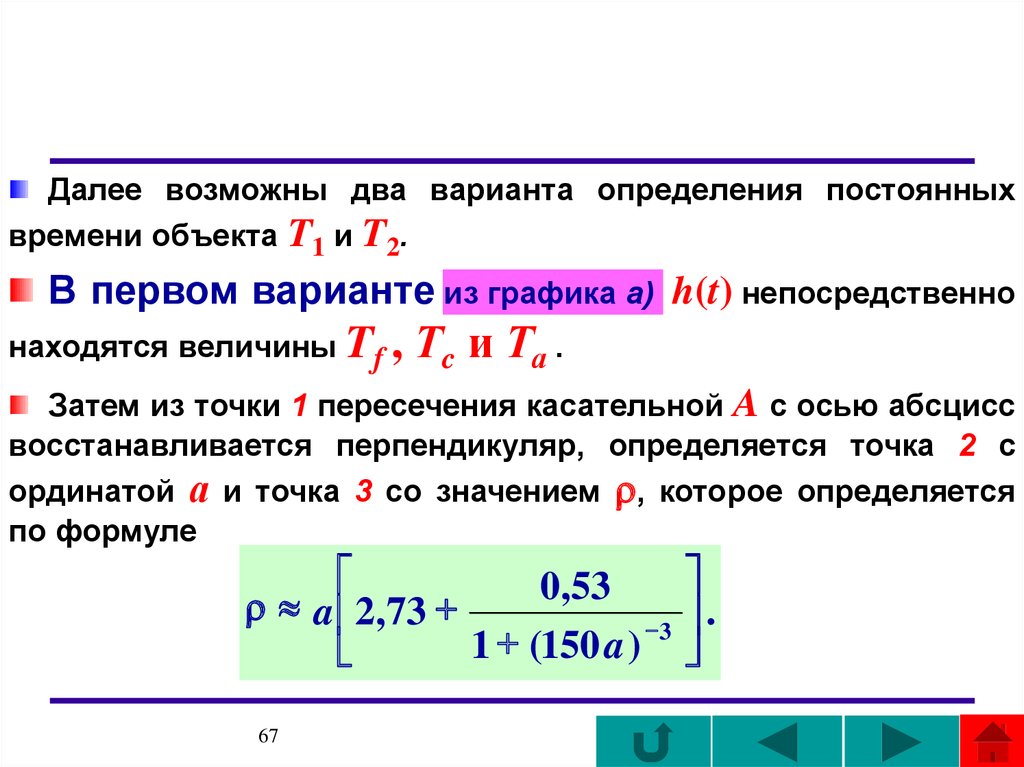
67.
Далее возможны два варианта определения постоянныхвремени объекта T1 и T2.
В первом варианте из графика а) h(t) непосредственно
находятся величины Tf ,
Тc и Та .
Затем из точки 1 пересечения касательной A с осью абсцисс
восстанавливается перпендикуляр, определяется точка 2 с
ординатой а и точка 3 со значением , которое определяется
по формуле
0,53
a 2,73 +
3
+
1 (150 a )
67
.
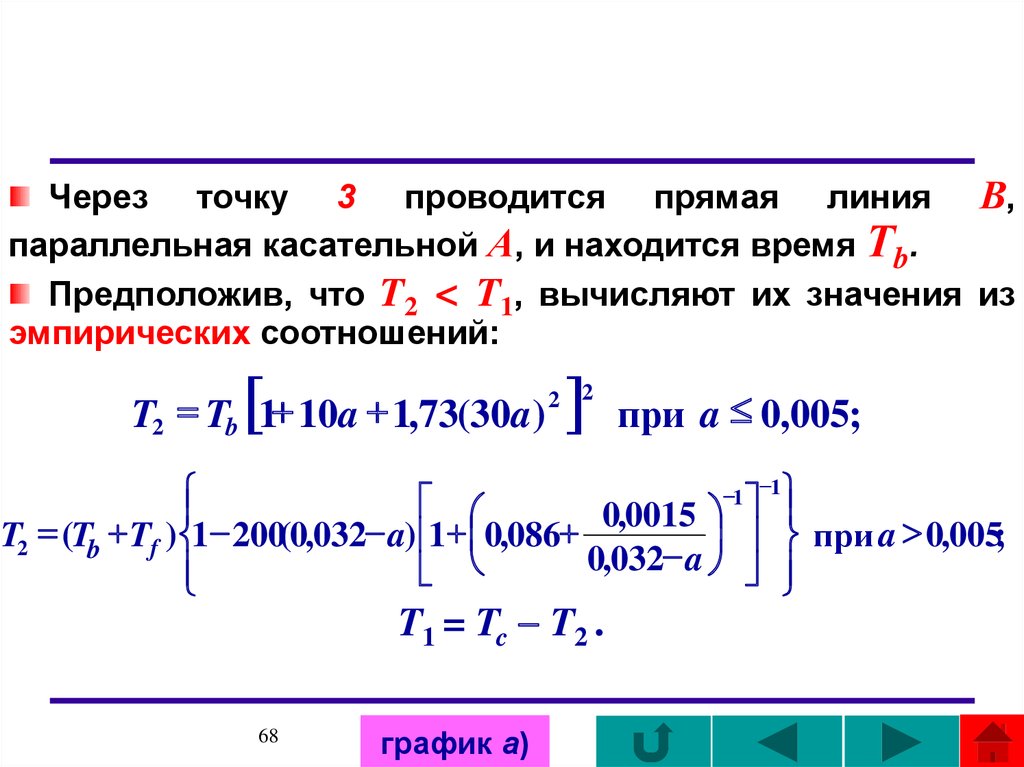
68.
Через точку 3 проводится прямая линия В,параллельная касательной А, и находится время Тb.
Предположив, что T2 < T1, вычисляют их значения из
эмпирических соотношений:
[
T2 = Tb 1+ 10a + 1,73(30a )
]
2 2
при a 0,005;
1 1
0
,
0015
T2 = (Tb + Tf ) 1 200(0,032 a) 1+ 0,086+
при a > 0,005;
0,032 a
T1 = Tc T2 .
68
график а)
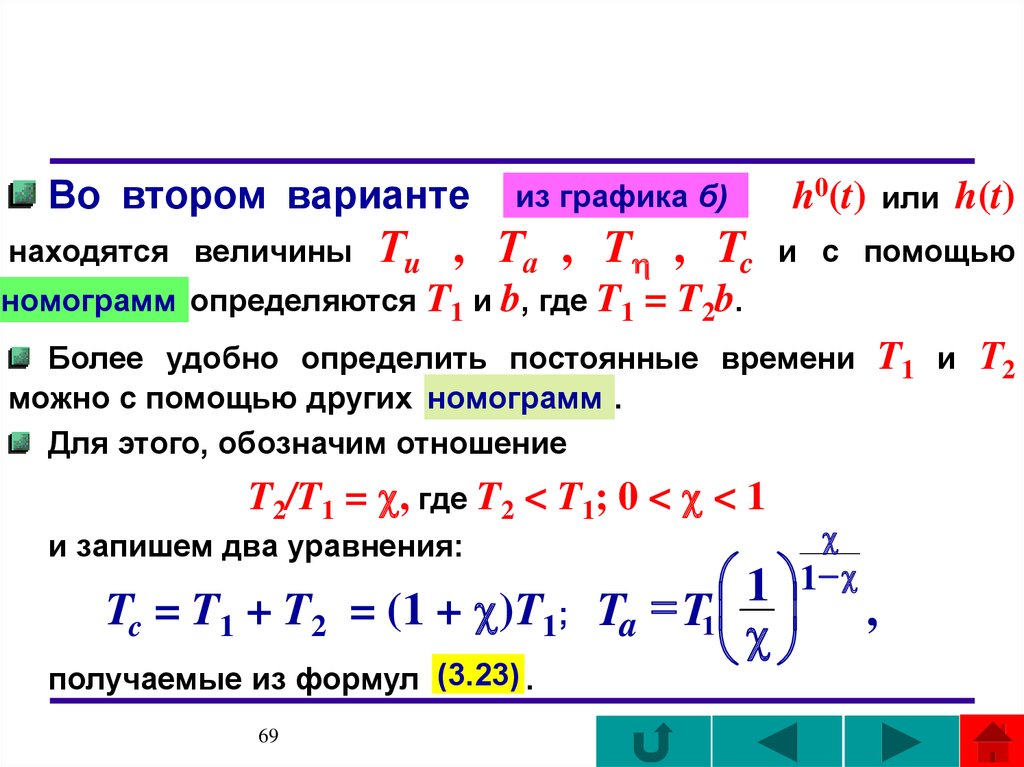
69.
Во втором вариантенаходятся величины
из графика б)
Тu , Та , T , Tc
номограмм определяются
h0(t)
h(t)
и с помощью
T1 и b, где T1 = T2b.
Более удобно определить постоянные времени
можно с помощью других номограмм .
Для этого, обозначим отношение
T2/T1 = c, где T2 < T1; 0 < c < 1
и запишем два уравнения:
Tc = T1 + T2 = (1 + c)T1;
получаемые из формул (3.23) .
69
или
c
T1
1 1 c
Ta = T1 ,
c
и
Т2
70.
По известной величине отношенияинтервале значений
Tc к Ta , находящейся в
0,73 Tc/Ta 1,0, и по
номограммам -
определяем
координаты двух точек пересечения линии
/Ta = const
(линии под углом
Tc
45° к оси абсцисс) и кривой
L.
Далее по координатам любой из этих точек пересечения
можно найти величины T1 и T2.
70
71. Достоинства и недостатки метода
Недостатки рассмотренных графических методоваппроксимации
переходной
функции
решением
уравнения второго порядка очевидны:
не всегда можно определить точку перегиба h(t);
проведение касательной связано с субъективными
ошибками определения Т1 и T2 ;
по существу не учитываются форма и характер всей
остальной переходной функции.
Вместе с этим следует признать, что графические методы:
очень просты в применении;
требуют мало времени для нахождения постоянных времени
T1 и Т2.
71
72. Номограммы для определения коэффициентов дифференциального уравнения
202,5
T
Ta
Tu
η
2,0 T
16
1,5
1,0
12
0,5
0
2
6
4
72
8
b
10
8
0
2
4
6
8
b
10
73. Номограммы для нахождения постоянных времени Т1 и T2 по Ольденбургу и Сарториусу
1,0T2
Ta
0,8
1,0
0,97
0,94
0,91
0,88
0,6
ни
ли
L
0,4
и
=
/Т а
Тс
0
0,2
73
0,4
t
0,2
ns
co
0,85
0,82
0,79
0,76
0,73
T1
Ta
0,6
0,8
1,0
74. Пример.
Рассмотрим пример нахождения T1 и Т2 по переходнойфункции
h0(t), показанной на рисунке с помощью
рассмотренных вариантов метода.
Определить точку перегиба визуально довольно трудно,
поэтому вычислим первые разности hg на участке времени
0 12 мин, т. е. там, где скорость изменения переходного
процесса максимальна.
Получим следующие значения hg при соответствующих tg с
шагом t = 2 мин:
tg
0
2
4
6
8
10
12
hg
8,7
16,8
18,0
15,0
11,5
8,5
6,0
74
75. График переходной функции к примеру определения динамических характеристик объекта
y(t)h( ) h(TУСТ)
100
90
h(t)
80
70
60
50
40
30
20
10
t, мин
0
1,2
4
2
2,8
6
75
8
8,2
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
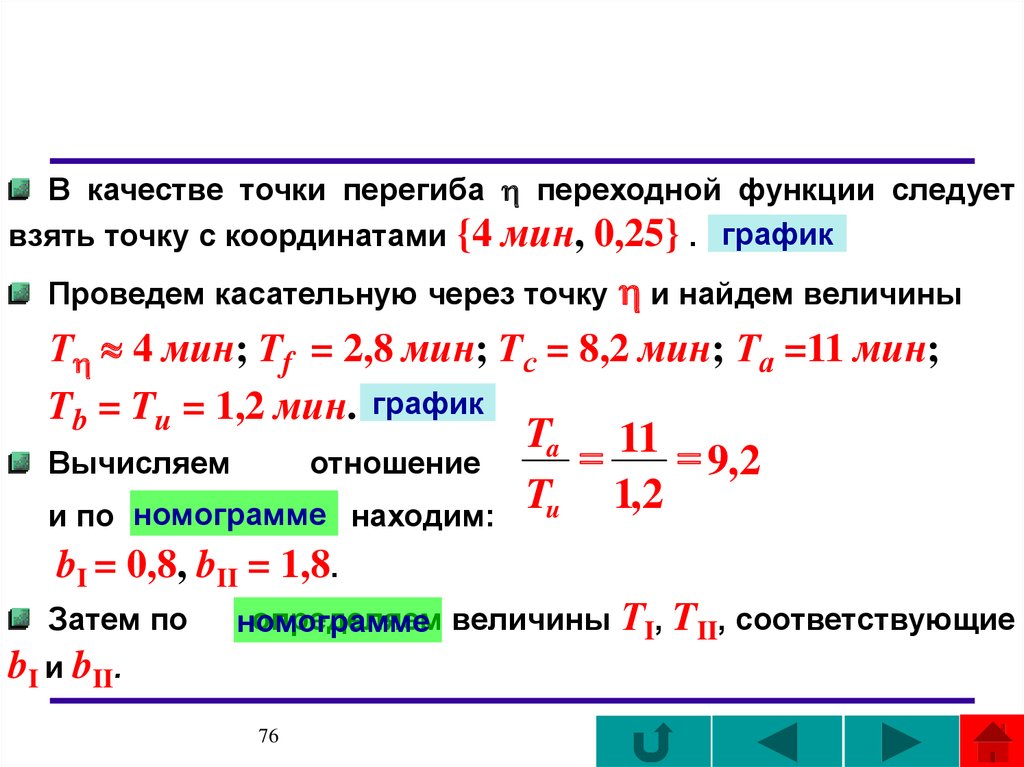
76.
В качестве точки перегиба переходной функции следуетвзять точку с координатами {4 мин, 0,25} . график
Проведем касательную через точку и найдем величины
Т 4 мин; Tf = 2,8 мин; Tс = 8,2 мин; Та =11 мин;
Tb = Tu = 1,2 мин. график
Вычисляем
отношение
и по номограмме находим:
Ta 11
=
= 9,2
Tu 1,2
bI = 0,8, bII = 1,8.
Затем по
определяем величины ТI, TII, соответствующие
номограмме
bI и bII.
76
77.
TПолучаем:
= 4 = 0,8
TI
TI
и TII = 3,33 мин.
и TI
Полагая постоянную времени
учитывая, что Т1
= 5 мин;
T1
T
= 4 = 1,2
TII TII
равной
TI
или
TII
и
= bТ2 , находим две передаточные функции:
100
WI (s) =
;
(4s + 1)(5s + 1)
100
WII(s) =
.
(3,33s + 1)(6s + 1)
Определить, какая из двух передаточных функций более
точно описывает динамические свойства объекта, можно лишь
путем вычисления ряда значений h(t) по формуле
(3.23) и
сравнения их с ординатами переходной функции.
77
78.
Подобный просчет и сравнение для данного примерапоказывают, что при малых значениях времени 0 t 6 мин
II (T1 = 3,33 мин;
T2 = 6,0 мин), при больших величинах t вариант I (T1 = 4
мин; T2 = 5 мин).
лучшее приближение
дает
вариант
Так как нам неизвестна область частот, в которой
следует наиболее точно определять значения АФХ, то
практически можно использовать любую из полученных
передаточных функций.
78
79.
Для определения T1 и T2 другимопределим величину а
0,035
способом по
графику -
и вычислим значение
0 ,53
= 0 , 035 2 , 73 +
3
+
1 (150 0 , 035 )
= 0 ,1139,
после чего восстановим перпендикуляр высотой 0,1 из
точки пересечения касательной с осью абсцисс.
Проведем через вершину перпендикуляра прямую линию,
параллельную касательной, и найдем величину Тb = 1,2 мин.
79
график
80.
Далее вычислимT2 и T1:
1 1
0
,
0015
T2 = (1,2 + 2,8) 1 200(0,032 0,035) 1+ 0,086+
= 3,144 мин;
0,032 0,035
Т1 = 8,2 3,144 = 5,086 мин.
Передаточная функция имеет вид:
100
WI ( s ) =
.
(3,144s + 1)(5,086s + 1)
80
81.
Для нахождения постоянных времени методом Ольденбургаи Сарториуса вычисляем отношение Tc = 8, 2 = 0,746
Ta
и по
11,0
T1 T1
T2 T2
=
= 0,275 .
=
= 0,465 и
номограмме определяем
Ta 11
Ta 11
Отсюда получаем Т1 = 3,015 мин и
передаточная функция объекта будет:
WI ( s ) =
81
Т2
= 5,12 мин,
100
.
(3,015 s + 1)(5,12 s + 1)
и
82. 4.2. Определение постоянных времени T1 и T2 интерполяционными методами
Это весьма многочисленная группа методов нахождениядинамических
характеристик
объекта,
основанная
на
измерении
нескольких
значений h(t)
и составлении
интерполяционных уравнений с двумя-тремя неизвестными.
Решение
уравнений
осуществляется
чаще
всего
графическими
способами
из-за
наличия
в
них
трансцендентных членов.
Рассмотрим наиболее полно разработанную
аппроксимации по Орманну.
82
методику
83.
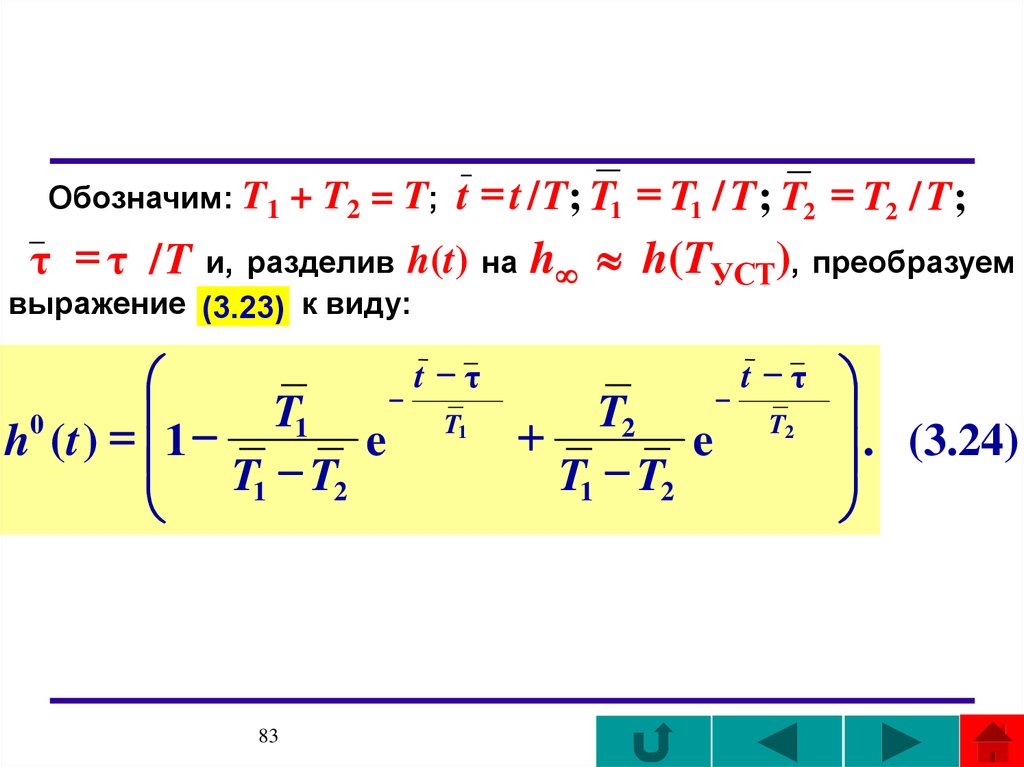
Обозначим: T1τ = τ /T
+ T2 = T; t = t /T; T1 = T1 / T ; T2 = T2 / T ;
и, разделив h(t) на
выражение (3.23) к виду:
h h(TУСТ), преобразуем
t τ
t τ
T1
T2
T1
T2
0
=
+
h (t ) 1
e
e
T1 T2
T1 T2
83
. (3.24)
84.
0h0(t) определяются величины h40 ,h80, h20
,
являющиеся
ординатами
h0(t) при соответствующих
аргументах t = t4 , t8 , t20 , а также t1 , t3 , t5 , t7 значения
времени t в моменты равенства функции h0(t) величинам 0,1;
0,3; 0,5 и 0,7 соответственно.
По графику кривой
Далее возможны четыре варианта аппроксимации.
При аппроксимации переходной функции решением
дифференциального
уравнения
второго
порядка
без
запаздывания вначале вычисляются величины T t7/1,2 и
t4 = 0,4T = t7/3 и по графику h(t) ордината
84
0
.
4
h
85.
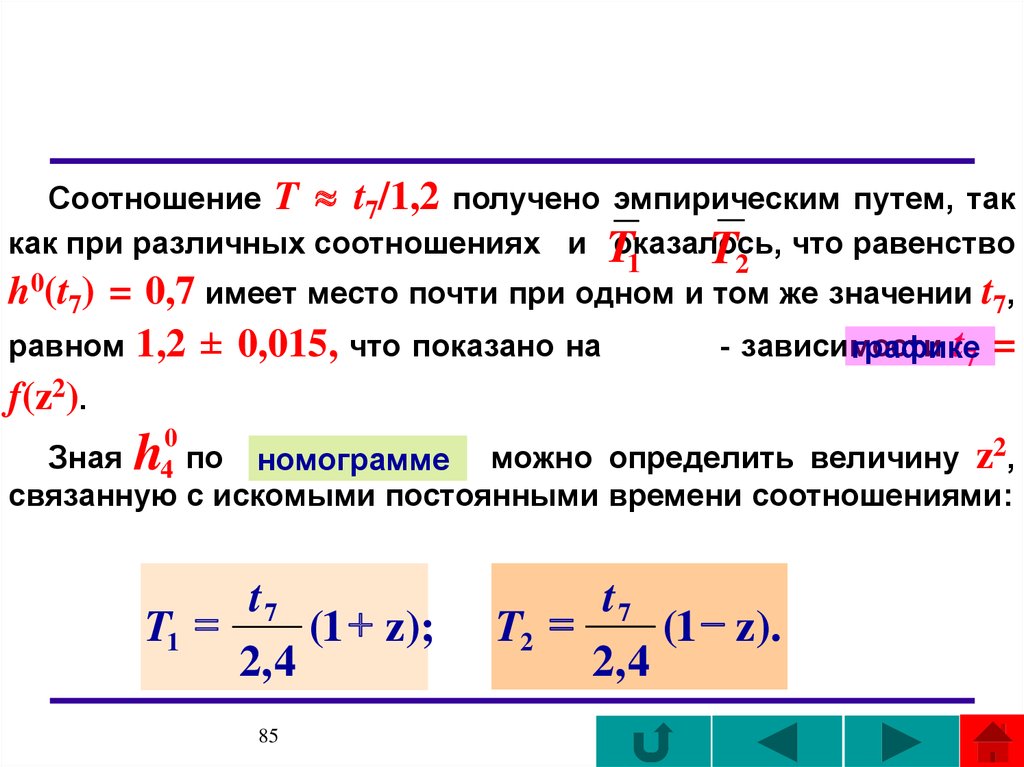
Соотношение T t7/1,2 получено эмпирическим путем, таккак при различных соотношениях и T
оказалось,
T что равенство
h0(t
1
2
= 0,7 имеет место почти при одном и том же значении t7,
равном 1,2 ± 0,015, что показано на
- зависимости
t7 =
графике
f(z2).
0
Зная h4 по номограмме можно определить величину z2,
7)
связанную с искомыми постоянными времени соотношениями:
t7
T1 =
(1 + z);
2, 4
85
t7
T2 =
(1 z).
2, 4
86. Номограмма для нахождения коэффициентов дифференциального уравнения интерполяционным методом
Зависимостьt7= f(z2)
h
t7
4
h
h
20
h8
1,21
8
0,55
0,30
h
0,25
1,20
20
h
0,90
0,525
4
0,50
0,20
1,19
0,475
z2
0
0,2
0,4
0,6
86
0,8
1,0
0,15
0,85
z2
0
0,2
0,4
0,6
0,8
1,0
87.
Проверкасправедливости
аппроксимации
заданной
функции h(t) выражением (3.24) при = 0 выполняется
0
20 ,
путем определения по найденной величине z значений h
t
0
8
h
и сравнением их с ординатами переходной функции при
= t20 = 2T и t = t8 = 0,8T.
Если ошибка аппроксимации превышает 2 3% или
то надо полагать 0.
87
0
4<
h
0,19,
88.
Во втором варианте методанеизвестные величины T1, T2 и .
Орманна определяются
h0(t)
находятся время t7, являющееся корнем уравнения h0(t7)= 0,7,
Из графика нормированной переходной функции
а также величина t , удовлетворяющая равенству h0 (t )= 0,191.
4
4
Если t4 t7 / 3 , то имеем эмпирическое соотношение:
3t 4 t 7 2 τ д 3t 4 t 7 ,
из которого находим
88
3t 4 t 7
τ
.
2
89.
Далее все операции по определениюT1 и T2
по первому варианту, однако всюду
подставляется новая переменная t*
вместо времени
= t .
При проверке может оказаться, что
отличаются
от
соответствующих
значений.
выполняются
0
8
h
t
0
20
и h существенно
экспериментальных
В этом случае необходимо аппроксимировать h(t)
решением дифференциального уравнения второго порядка с
кратными корнями.
h
0
При
0,33 переходная функция может быть
4 >
аппроксимирована решением дифференциального уравнения
первого порядка с запаздыванием.
89
90. Пример.
Из графика находим t7T=
= 10 мин и определяем:
t7
= 10 = 8,333 мин ; t4 = 0,4T = 0,4 8,333 = 3,333 мин.
1, 2 1, 2
По нормированной функции
0
=
h (t 4 ) h4 (3,333) = 0,195
0
4
h0(t) находим
, а по номограмме
величину
z2 = 0,04 (соответственно z = 0,2).
Далее вычисляем постоянные времени Т1 и T2:
10 +
=
T1
(1 0,2) = 5,0 мин ;
2,4
90
10
=
T2
(1 0,2) = 3,333 мин .
2,4
91.
Для проверки по этой же номограмме0
0
=
0,9055
и
h8 = 0,4825 при z2 = 0,04.
h20
определяем
Из графика переходной функции имеем:
h0(t20) = h0(2T ) = h0(2 8,333) = 0,897;
h0(t8) = h0(0,8 T ) = h0(0,8 8,333) = h0(6,6664) = 0,49.
Относительные ошибки приближения не превышают одного
процента, и поэтому динамику объекта можно описать
передаточной функцией следующего вида:
W (s) =
91
100
.
(5s + 1)(3,333s + 1)
92. Достоинства и недостатки интерполяционных методов
Аппроксимация переходных функций решением уравнениятипа (3.24) с помощью интерполяционных приемов обладает
положительными свойствами:
измерение h(t) в нескольких точках увеличивает
информацию о характере переходного процесса;
использование приближенного соотношения t7 1,2(T1+T2)
делает операцию интерполяции нестрогой и в некотором
смысле - эквивалентной приближению.
Недостатки методов:
заранее фиксированные значения узлов интерполяции не
всегда позволяют осуществлять аппроксимацию таблично
заданных переходных функций;
переходные функции должны быть гладкими.
92
93. 5. Аппроксимация переходной функции решением дифференциального уравнения первого порядка
Большинство динамических объектов нефтяной игазовой промышленности можно с достаточной точностью
описать передаточной функцией апериодического звена
первого порядка.
Если
экспериментально
получен график
изменения
выходной величины y(t) при единичном входном воздействии
то его можно (исходя из эвристических соображений)
аппроксимировать аналитическим выражением вида:
1(t),
y (t ) = k (1 e
93
t / T
).
94.
Изображение Y(s) по Лапласу функции y(t) можноопределить по таблицам преобразования Лапласа или,
используя формулу прямого преобразования Лапласа.
Получим:
k
Y (s) =
.
s (Ts + 1)
Используя формулу (2.9) , описывающую связь между
выходной координатой объекта и входной с учетом, что
X(s)=L{1(t)}=1/s, получим выражение передаточной функции:
94
95.
Y(s)sk
k
= sY(s) =
=
W(s) =
. (3.25)
X(s)
s(Ts +1) Ts +1
Коэффициент k представляет собой отношение между
установившейся величиной выходного сигнала и амплитудой
входного сигнала.
Постоянная времени Т системы первого порядка равна
отрезку времени, за которое переходная функция достигает
63% своей установившейся величины.
95
график
96.
Если провести касательную к графику переходной функциина начальном участке до точки пересечения с уровнем
установившейся
величины
h(t),
то
полученный
времени будет соответствовать значению
кривой y(t) при t
Т,
так как наклон
= t1 = 0 равен
dy (t )
t / T
k
= e
t =0 = k / T .
dt t =0 T
При t
= T наклон достигает величины k. график
96
отрезок
97. Переходная характеристика системы первого порядка
x(t);1(t)1
0
t, c
t1
y(t);h(t)
k
0,632k
0
97
t1
T
t, c
98. 6. Аппроксимация переходной функции решением дифференциального уравнения первого порядка с запаздыванием
Если переходная функция запаздывает на время , т.е. равна0 в течение промежутка времени после приложения
ступенчатого воздействия, то система имеет чисто временное
запаздывание, для которого преобразование Лапласа есть
e- s. график
Решение линейного дифференциального уравнения первого
порядка с запаздывающей правой частью и нулевыми
начальными условиями будет:
h(t ) = 0; 0 t τ ,
τ
t
T
=
h
(
t
)
h
(
)
1
e
98
; t > τ.
(3.26)
99.
Аппроксимирующаяиметь вид:
передаточная
усиления
будет
- s
k
e
W (s) =
,
Ts + 1
Коэффициент
способом:
функция
k
(3.27)
находится
обычным
k = h(TУСТ)/A или k = h0(TУСТ), если имеем дело с
единичной функцией.
Постоянная времени Т и время запаздывания
подлежат определению из графика экспериментальной
переходной функции h(t).
99
100. Переходная характеристика системы первого порядка с запаздыванием
x(t);1(t)1
0
t, c
y(t);h(t)
k
0,632k
0
100
T
t, c
101.
Если при определении значений T и по графикупереходной функции возникают определенные трудности, то
применяют
интерполяционный метод для их
нахождения.
Интерполяционный метод заключается в следующем.
На нормированной переходной функции ( график )
h0(t) = h(t)/h(ТУСТ) выбираются две точки A и B с
координатами hА, tA и hB, tB .
Желательно, чтобы точка A была расположена около точки
перегиба, а ордината hB равнялась 0,8 0,9.
Рассматривая точки А и B как интерполяционные узлы
кривой, определяют неизвестные величины по формулам:
101
102.
00
tA τ
t B ln(1 hA ) t A ln(1 hB )
=
T
.
τ=
;
0
0
ln(1 hA )
ln(1 hA ) ln(1 hB )
Аппроксимирующая кривая ( график ) будет пересекать
экспериментальную переходную функцию в начале координат,
точках A и B и в принципе - в бесконечности, т. е. при t = .
Этим самым обеспечивается приемлемая точность описания
динамических свойств объекта передаточной функцией типа
.
(3.27)
Приближенной
проверкой
допустимости
подобной
аппроксимации служит неравенство
0 ,594 h(Т УСТ ) h(T ) 0 , 632 h(TУСТ ).
102
103. Определение T и t интерполяционным методом
Определение T иинтерполяционным методом
h(t )
h
1
B
hB
A
hA
tA
0
103
tB
t
104. Пример.
Определим величиныТи
передаточной функции (3.27) по
функции h0(t) , показанной на графике а) .
Выберем на нормированной переходной функции две
точки А и B с координатами {4 мин, 0,255} и {18 мин, 0,92}.
Далее вычислим время запаздывания
18 ln(1 0 , 255 ) 4 ln(1 0 ,92 )
= 2 ,155 мин
τ=
ln(1 0 , 255 ) ln(1 0 ,92 )
и постоянную времени:
T=
104
4 2,155 =
6, 27 мин.
ln(1 0, 225 )
105.
Получаем передаточную функцию объекта2 ,155 s
100
e
W (s) =
.
6 , 27 s + 1
В качестве проверки вычислим несколько значений
выражению
t 2 ,155
h( t ) = 100 1 exp
6 , 27
h(t)
по
и покажем их на графике а) кружками.
Из графиков видно, что подобная аппроксимация дает
приемлемое приближение к заданной переходной функции в
интервале времени 7 42 мин при незначительных затратах
времени на определение Т и .
105
106. 7. Аппроксимация переходной функции решением дифференциального уравнения с кратными действительными корнями
Переходнаяфункция
промышленного
объекта
аппроксимируется решением линейного дифференциального
уравнения порядка n с нулевыми начальными условиями
n 1 i
t
t
T
h ( t ) = h ( ) 1
C
e
i
i
i = 0 T
.
(3.28)
Аппроксимирующая передаточная функция будет иметь
такой вид:
k
.
W (s) =
n
(Ts + 1)
106
(3.29)
107.
Требуется определить всего лишь два неизвестныхпараметра: Т и n , сохранив при этом все преимущества и
точность аппроксимации h(t) суммой экспонент с
весом t i ;
i = 0, 1, 2, ..., n 1.
Существуют методы определения Т и n, основанные на
графических построениях в точке перегиба переходной
функции, например, показанной на графике б) .
Через точку проводится касательная до пересечения с
осью абсцисс и линией h(ТУСТ).
По графику б) определяются величины
Далее по отношению
Та /Тu
Tа , T , Tu .
с помощью номограммы а)
находят n, а затем по номограмме б) определяю Т.
107
108. Номограммы для нахождения коэффициентов дифференциального уравнения с кратными корнями
1010
Ta
Tu
8
Tη
8
6
6
4
4
2
2
T
n
0
2
4
6
а)
108
8
10
n
0
2
4
6
б)
8
10
109. Пример.
Аппроксимируем переходную функцию ()
график
решением дифференциального уравнения с кратными
корнями (3.28) .
Из графика h(t) находим:
Тu = 1,1 мин; T = 4 мин; Ta = 11 мин.
По номограмме а) , согласно отношения Ta /Tu = 11/1,1=10,
определяем величину n = 2 .
В тех случаях, когда n дробное число, его надо
округлять до ближайшего целого.
Затем при n
= 2 по
откуда T = 4 мин.
109
номограмме б) находим T
/T = 4/1 = 1,
110.
Передаточная функция будет иметь следующий вид:100
W (s) =
.
2
+
( 4 s 1)
Проверка точности аппроксимации осуществляется путем
вычисления ряда значений h(t) , согласно (3.28) , и сравнения
их с экспериментальными величинами.
110
111. 8. Аппроксимация переходных функций объектов, содержащих интегрирующие звенья
В общем случае дифференциальное уравнение движенийвыходной координаты объекта y(t) с интегрирующими
свойствами может быть записано в таком виде:
n 1
n
l
m
d y(t )
d y(t )
d y(t )
d x(t )
+
+
+
=
+ Lb1 x(t ) ,
an
an 1
bm
L al
n
m
n 1
l
dt
dt
dt
dt
(3.30)
где n m; 0 < l < n; al , al + 1 , ..., an постоянные
коэффициенты;
b1 , b2 , b3 , ..., bm постоянные
величины. Некоторые из
них могут быть равны нулю, однако b1 0.
В задачах исследования динамических характеристик
промышленных объектов величина l обычно не больше 2.
111
112.
Уравнение (3.30) можно легко свести к обычному для насуравнению типа (2.2) .
Это достигается подстановкой dly(t)
Порядок
нового
уравнения
/dtl = z(t).
будет
равен
n l,
и
для
определения его n l + m неизвестных коэффициентов можно
применять все рассмотренные выше способы аппроксимации
переходных функций.
Однако подобное преобразование означает l-кратное
дифференцирование
исходной
переходной
функции
промышленного объекта, что связано с появлением
субъективных ошибок.
112
113. Переходные функции объектов с интегрирующими свойствами
Приизвестной
форме
испытательного
входного
воздействия x(t) нетрудно по виду переходной функции
установить наличие в исследуемом объекте интегрирующих
звеньев. x(t)
x(t)
x(t)
A
0
A
A
t
h(t)
0
t
t
113
0
t
h(t)
h(t)
0
0
t
0
t
114.
Аппроксимирующая передаточная функция, согласно (3.30)имеет полюс кратности l в начале координат и может быть
представлена в следующей форме:
m
1
=
W (s)
l
s
b
s +1
g
g
g =1
n
as
e
τs
,
i l
i
i=l
где время
чистого запаздывания, определяемое
обычными приемами из переходной функции.
114
115.
На практике чаще применяют графические методыаппроксимации переходных функций объектов с
интегрирующими свойствами.
В тех случаях, когда переходная функция изменяется с
постоянной скоростью ( графики а) и б) ), начиная с
момента нанесения возмущения x(t)= A (или спустя время ),
динамические свойства объекта можно аппроксимировать
передаточной функцией
k
W (s) =
s
где k =tg /A;
или
s
k
W (s) = e ,
s
tg тангенс угла наклона асимптоты к h(t);
- равно отрезку оси абсцисс, отсекаемому асимптотой.
115
116. Определение коэффициентов передаточной функции объекта с интегрирующими свойствами
x(t)x(t)
A
A
0
t
h(t)
0
t
h(t)
hu
0
а)
116
t
0
б)
t
117.
Этот метод применим тогда, когда значения h(t) при 0 tне превышают величины , определяемой классом точности
регистрирующей аппаратуры.
В более общем случае в качестве аппроксимирующей
передаточной функции следует принимать следующее
выражение:
τs
k
W (s) =
.
n e
s (Ts + 1)
Для нахождения неизвестных k, Т и n из
графика б) переходной функции определяют угол наклона асимптоты к
оси абсцисс, величины hu и Тu = .
Затем
вычисляется k = tg /A, где А амплитуда
ступенчатого воздействия.
Из номограмм находятся Т и n.
117
118. Номограммы для нахождения коэффициентов дифференциального уравнения объекта с интегрирующими свойствами
0,4hu
kT u
10
0,3
Tu
T
8
6
0,2
4
2
0,1
0
2
4
6
а)
118
8
n
10
0
2
4
6
б)
8
n
10
119.
End119
120. Формула (2.9)
Y ( s ) = W ( s ) X ( s ) = W ( s ) / s.120
121. Формула (2.2)
n 1n
d y(t )
d y(t )
+
+
+
=
an
a
a
y
(
t
)
L
n
1
0
n
n1
dt
dt
m
m 1
d x(t )
d x(t )
= bm
+
+
+
b
b0 x(t )
L
m
1
m
m 1
dt
dt
(2.2)
Характеристический многочлен линейного дифференциального уравнения (2.2) или характеристическое уравнение:
a n s + a n 1 s
n
121
n 1
+ a n 2 s
n 2
+ ... + a0 = 0