





















 Единичный импульс")


 Математика
МатематикаПохожие презентации:






")



Статические и динамические характеристики объектов и звеньев управления
1.
1Лекция №2
Статические и динамические
характеристики объектов и звеньев
управления
2.
План лекции:2
1. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
2.
ОПЕРАТОРНАЯ ФОРМА ЗАПИСИ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
3.
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, ХАРАКТЕРИСТИЧЕСКОЕ
УРАВНЕНИЕ
4.
ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ
СХЕМ
5.
ПОНЯТИЕ О СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИКАХ САУ
6. ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ
7. ПЕРЕХОДНАЯ ФУНКЦИЯ САУ
3.
61. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
Преобразованием Лапласа функции x(t)
называется функция
X ( p ) L [ x( t )] x( t ) e
pt
dt ,
0
Здесь x(t) - оригинал функции,
X(p) - ее изображение по Лапласу,
L – оператор преобразования.
4.
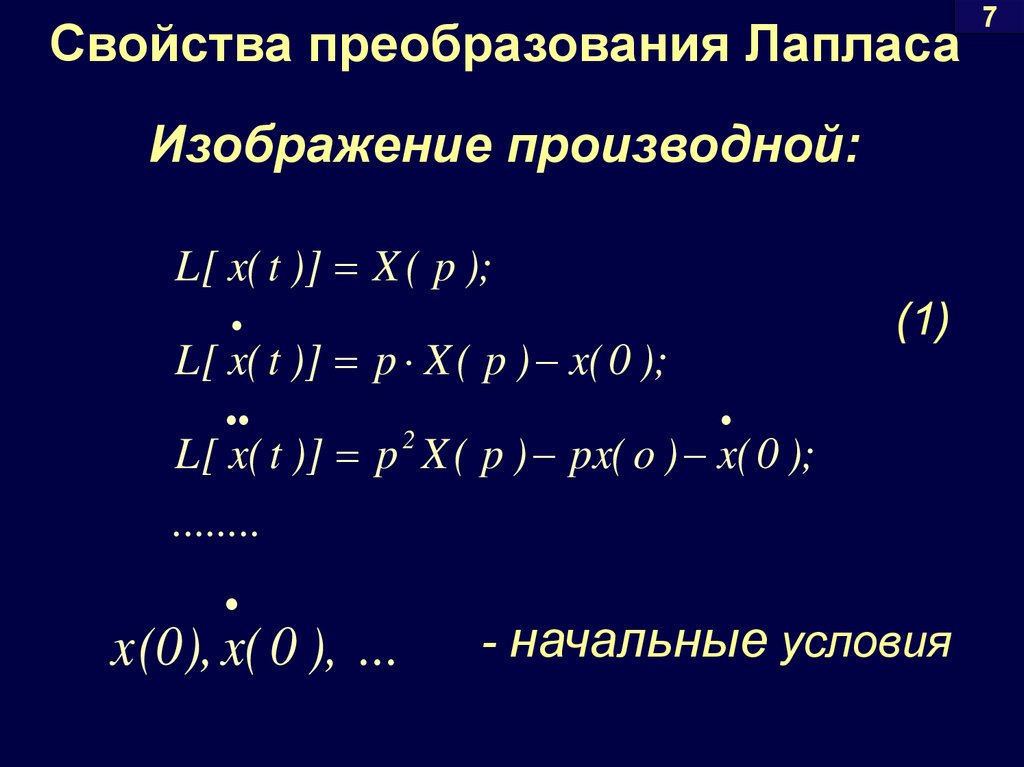
Свойства преобразования ЛапласаИзображение производной:
L [ x( t )] X ( p );
(1)
L [ x( t )] p X ( p ) x( 0 );
L [ x( t )] p X ( p ) px( o ) x( 0 );
2
........
x(0), x( 0 ), ...
- начальные условия
7
5.
8Изображение производной при
нулевых начальных условиях:
x(0) 0,
x( 0 ) 0 ,
...
L [ x( t )] X ( p );
L [ x( t )] p X ( p );
L [ x( t )] p X ( p );
2
........
L[ x
(n)
( t )] p X ( p ).
n
(2)
6.
9Изображение интеграла:
t
X( p )
L [ x( )d ]
p
0
(3)
Предельные теоремы:
lim x( t ) lim pX ( p );
t 0
p
lim x( t ) lim pX ( p ) .
t
p 0
(4)
7.
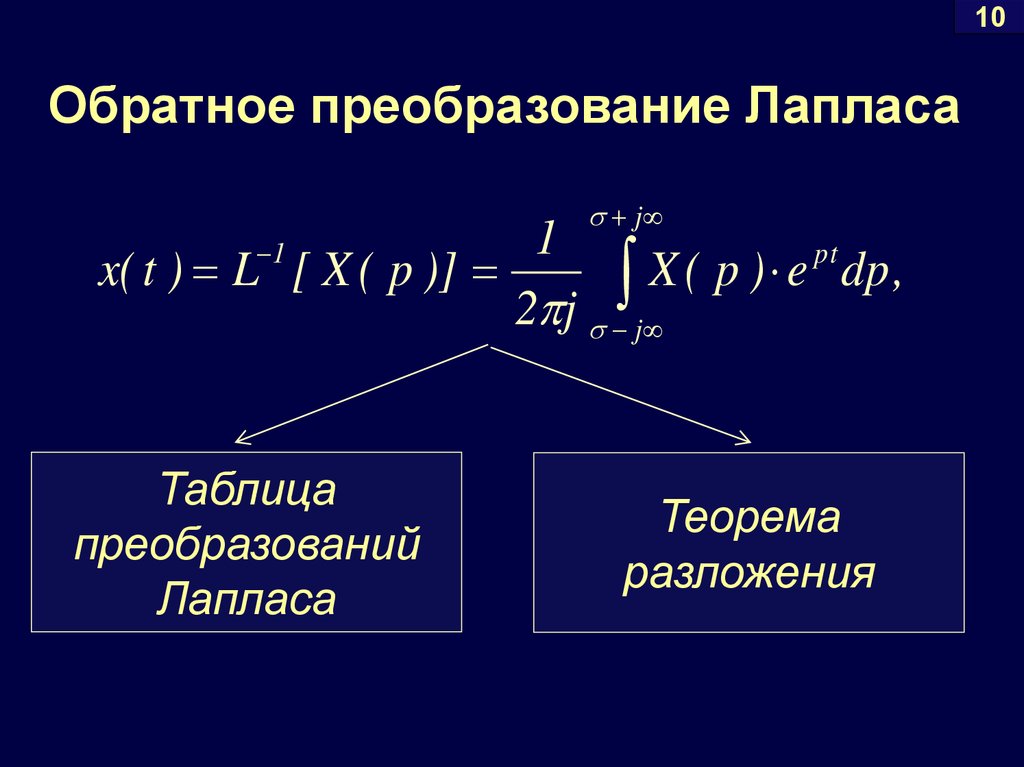
10Обратное преобразование Лапласа
j
1
pt
x( t ) L [ X ( p )]
X ( p ) e dp ,
2 j j
1
Таблица
преобразований
Лапласа
Теорема
разложения
8.
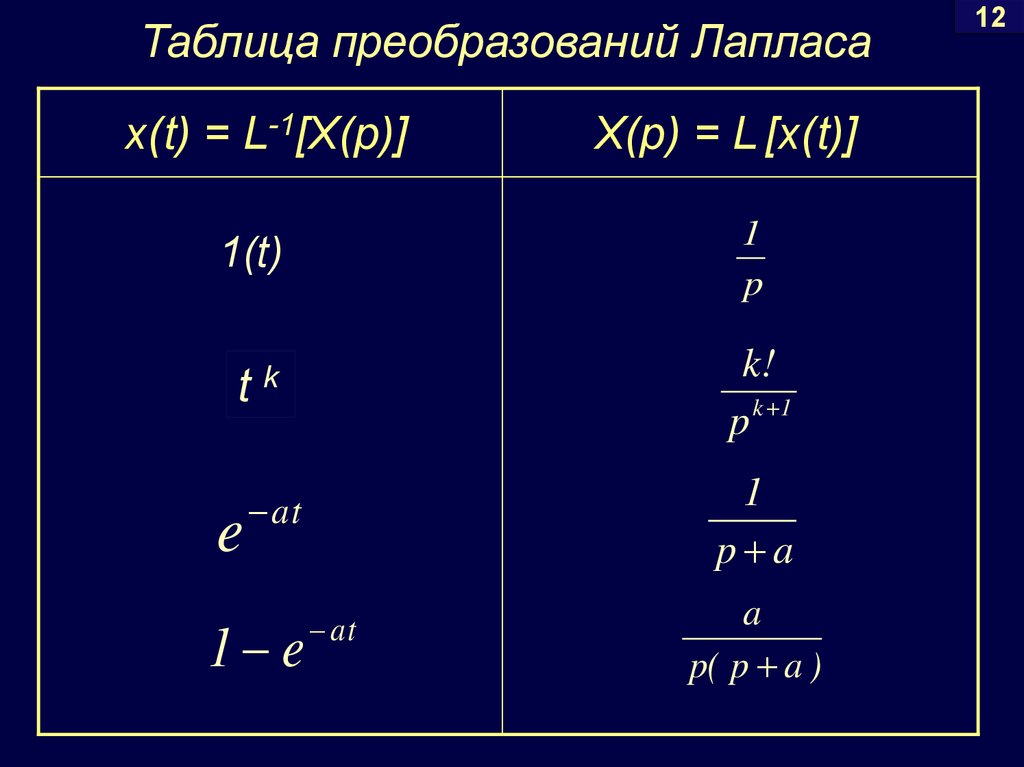
Таблица преобразований Лапласаx(t) = L-1[X(p)]
1
p
1(t)
t
e
k!
p k 1
k
1
p a
at
1 e
X(p) = L [x(t)]
at
a
p( p a )
12
9.
132. ОПЕРАТОРНАЯ ФОРМА ЗАПИСИ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Пусть оператор САУ имеет вид:
a3 y
b2 x
(3)
(2)
( t ) a2 y
(2)
( t ) a1 y ( t ) a0 y( t )
(1)
( t ) b1 x ( t ) b0 x( t )
(1)
(5)
Слева – всегда оператор выходного сигнала,
справа – оператор входного сигнала.
Размерность системы равна
максимальной степени производной!!
10.
14Напомним, что
L[ y(n) (t)]=pn Y(p);
L[ x(n) (t)]=pn X(p).
Применим преобразование Лапласа к
уравнению (5),
a3 p3 Y(p) + a2 p2 Y(p) + a1 p Y(p) + a0 Y(p) = b2
p2 X(p) + b1 p X(p) + b0 X(p),
(a3 p3 + a2 p2 + a1 p + a0 )Y(p) =
( b2 p2 + b1 p + b0 ) X(p),
11.
15A(p) Y(p) = B(p) X(p),
(6)
A(p) an p ... a1 p a0 ,
n
B(p) bm p ... b1 p b0 .
m
Уравнение (6) называется операторным.
Операторная форма позволяет свести
анализ дифференциальных уравнений к
исследованию алгебраических
уравнений.
12.
163. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ,
ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ
П ередато ч но й функцией
линейной стационарной САУ называется
отношение
изображения
по
Лапласу
выходного сигнала Y(p) к такому же
изображению входного сигнала X(p) при
нулевых начальных условиях:
Y( p )
W( p )
X( p )
(7)
13.
17Из операторной формы записи следует, что
Y ( p ) bm p ... b1 p b0 B( p )
W( p )
(8)
n
X ( p ) an p ... a1 p a0 A( p )
m
A( p ) a n p ... a1 p a0 0
Уравнение
называется характеристическим.
n
Корни знаменателя передаточной функции
A(p) =0 называются ее полюсами, корни
числителя B(p) =0 называются нулями.
14.
18СТРУКТУРНЫЕ СХЕМЫ САУ
Структурной схемой САУ называется
графическое изображение ее элементов,
представленных своими передаточными
функциями, и связей между ними.
Условные обозначения структурных
схем
Элемент САУ:
X(p)
W( p )
Y(p)
15.
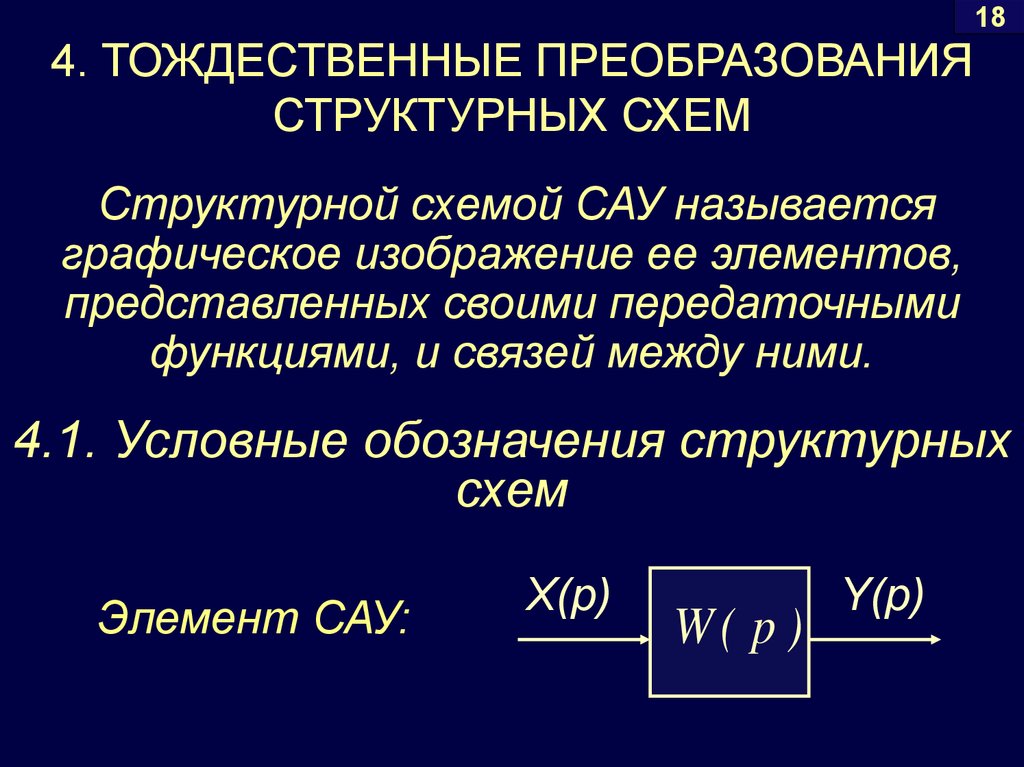
184. ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯ
СТРУКТУРНЫХ СХЕМ
Структурной схемой САУ называется
графическое изображение ее элементов,
представленных своими передаточными
функциями, и связей между ними.
4.1. Условные обозначения структурных
схем
Элемент САУ:
X(p)
W( p )
Y(p)
16.
19Сумматор:
X1(p)
X1(p) – X2(p)
X1(p)
X2(p)
X1(p)
X1(p) + X2(p)
X2(p)
X1(p) – X2(p)
X2(p)
X1(p)
X1(p) + X2(p)
X2(p)
17.
204.2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
СОЕДИНЕНИЙ ЗВЕНЬЕВ САУ
Последовательное соединение звеньев
Y2(p)
Y1(p)
X(p)
W1 ( p )
W2 ( p )
Y (p)
W3 ( p )
Y1(p) = W1(p) X(p);
Y2(P) = W2 (p) Y1(p);
Y(P) = W3 (p) Y2(p).
18.
10Исключая промежуточные переменные,
получим:
Y2 ( p ) W1 ( p ) W2 ( p ) X ( p );
Y ( p ) W1 ( p ) W 2( p ) W3 ( p ) X ( p ).
n
Y( p )
W( p )
W1 ( p ) W2 ( p ) ... Wi ( p ).
X( p )
i 1
При последовательном соединении
звеньев их ПФ перемножаются:
19.
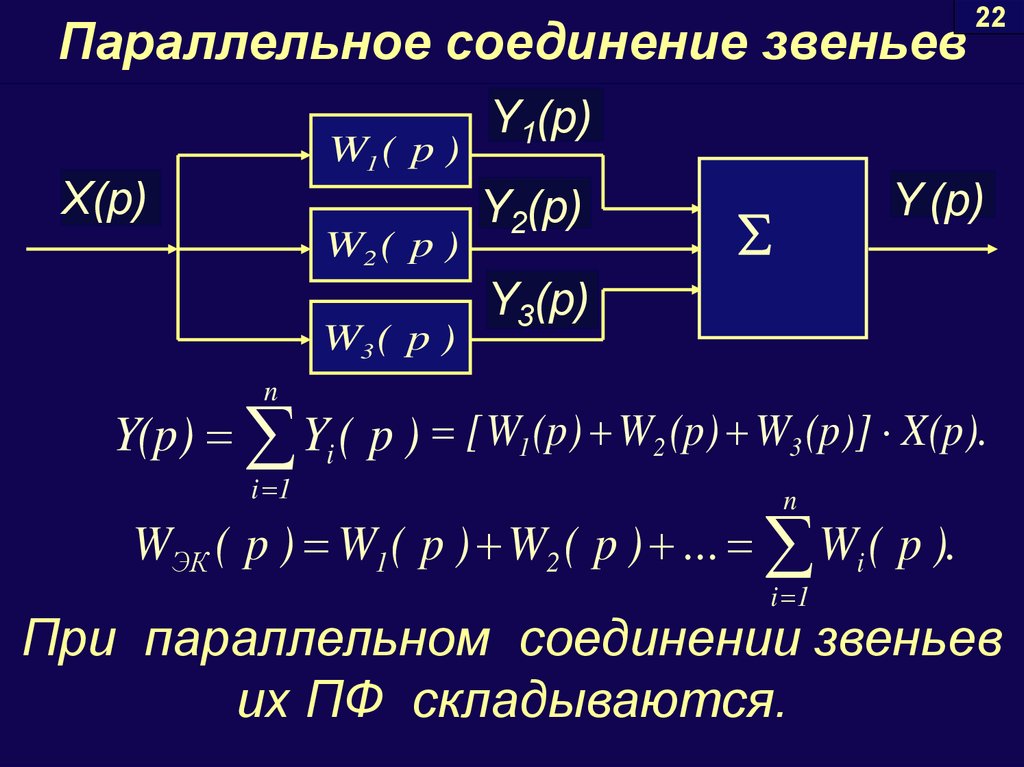
Параллельное соединение звеньевW1 ( p )
X(p)
W2 ( p )
W3 ( p )
22
Y1(p)
Y2(p)
Y (p)
Y3(p)
n
Y(p) Yi ( p ) [W1 (p) W2 (p) W3 (p)] X(p).
i 1
n
WЭК ( p ) W1 ( p ) W2 ( p ) ... Wi ( p ).
i 1
При параллельном соединении звеньев
их ПФ складываются.
20.
Встречно-параллельное соединениезвеньев
X(p)
(p)
Y1(p)
Y(p)
W1 ( p )
W2 ( p )
(p) = X(p) – Y1 (p);
1
Y(p) = W1 (p) (p);
Y1 (p) = W (p) Y(p).
2
23
21.
1. Исключаем (p):Y(p) = W1 (p) [X(p) – Y1(p)];
Y1 (p) = W2(p) Y(p).
2. Исключаем Y1(p):
Y(p) = W1(p) [ X(p) – W2(p)Y(p) ]
[1+ W2(p) W1(p)] Y(p) = W1(p) X(p)
W1 ( p )
W( p )
.
1 W1 ( p )W2 ( p )
24
22.
25ПФ встречно-параллельного
соединения звеньев
с положительной обратной связью :
W1 ( p )
W( p )
.
1 W1 ( p )W2 ( p )
Для определения ПФ САУ методом
преобразования структурных схем
последовательно упрощают структурную
схему САУ, объединяя звенья, соединенные
последовательно, параллельно и встречнопараллельно с использованием
полученных формул.
23. 5. ПОНЯТИЕ О СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИКАХ САУ
165. ПОНЯТИЕ О СТАТИЧЕСКИХ И
ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИКАХ
САУ
Системы автоматического управления
являются динамическими системами,
поэтому их качество оценивается по
поведению в двух режимах работы.
Установившийся
(статический
режим)
Переходный
(динамический
режим)
24.
17Установившийся (статический режим)
- это реакция системы, остающаяся
спустя большой промежуток времени с
момента приложения входного сигнала.
Решаются две задачи:
согласование диапазонов изменения
переменных в элементах СУ с диапазоном
изменения переменных ОУ и определение
коэффициента усиления УУ.
25. Зависимость между входным и выходным сигналами в установившемся режиме называется статической.
18Зависимость между входным и выходным
сигналами в установившемся режиме
называется статической.
Статические
характеристики
линейные
нелинейные
Линейными называются статические
характеристики, описываемые уравнением
y k x b,
26.
19Примеры статических характеристик
y
нелинейная
kx = dy/dx
0
линейная
k=tg
x
Значение производной dy/dx в какой-либо
точке статической характеристики
называется коэффициентом усиления в
этой точке.
27.
20Переходный (динамический режим)
- характеризуется переходом
динамической системы из одного
равновесного состояния в другое.
Характеристики поведения САУ в ПП
называются ДИНАМИЧЕСКИМИ.
УСТАНОВИВШЕМСЯ называется режим,
наступающий после завершения ПП.
28.
Любая САР состоит из 2-х основных элементов: объектарегулирования (ОР) и регулятора. Основными свойствами
объектов
регулирования
являются
емкость
объекта,
самовыравнивание, время регулирования и запаздывания.
Емкость объекта – способность объекта аккумулировать
вещество или энергию.
Самовыравнивание – свойство ОР после внесения
возмущения (например, нарушение равновесия между
притоком и расходом вещества) самостоятельно, без участия
человека или регулятора, переходить в новое равновесное
состояние. Самовыравнивание облегчает функционирование
регулятора.
Объекты регулирования, обладающие свойством
самовыравнивания, называются статическими, а не
обладающие этим свойством – астатическими.
29.
226. ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ
О динамических свойствах системы судят
по ее реакции на типовые входные
воздействия.
Временной характеристикой звена
называют закон изменения выходной
величины звена во времени y(t) в ответ на
изменение входного воздействия x(t) при
условии, что до приложения входного
воздействия звено находилось в покое.
30.
23А) Единичная ступенчатая функция
ЕДИНИЧНОЙ СТУПЕНЧАТОЙ
называется функция, удовлетворяющая
условиям:
0
1( t )
1
t 0,
1
t 0.
0
1
1
pt
.
L [ 1( t )] 1( t ) e dt
p 0
p
0
t
31. Б) Единичный импульс
24Б) Единичный импульс
ЕДИНИЧНЫМ ИМПУЛЬСОМ
(“дельта”функцией, функцией Дирака)
называется функция, удовлетворяющая
условиям:
0
(t)
t
( )d 1;
0
1/
t
t 0,
t 0.
( t ) lim ( t ) .
0
L [ ( t )] 1 .
32.
25В) Гармонический входной сигнал
ГАРМОНИЧЕСКИЙ ВХОДНОЙ СИГНАЛ
имеет вид:
x(t) = Ax Sin ( t + x ),
Ax - амплитуда входного сигнала;
- круговая частота (рад/с);
x - начальная фаза (рад).
33.
267. ПЕРЕХОДНАЯ ФУНКЦИЯ САУ
При анализе качества системы управления
обычно выбирается ступенчатый сигнал
П Е Р Е Х О Д Н О Й Ф У Н К Ц И Е Й h(t)
САУ называется ее реакция на
единичный ступенчатый
сигнал при нулевых начальных условиях.
Функция h(t) характеризует переход САУ из
одного равновесного состояния в другое.
34.
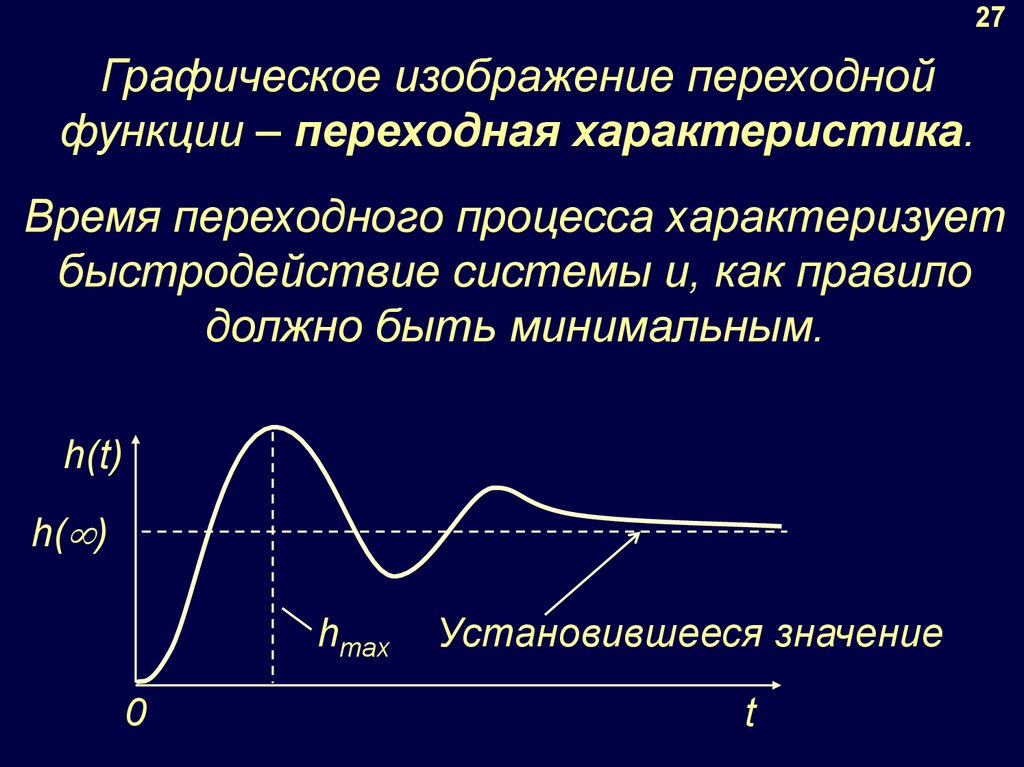
27Графическое изображение переходной
функции – переходная характеристика.
Время переходного процесса характеризует
быстродействие системы и, как правило
должно быть минимальным.
h(t)
h( )
hmax
0
Установившееся значение
t
35.
285% h( )
h(t)
h( )
hmax
0
tр
ПЕРЕРЕГУЛИРОВАНИЕ - это
величина, определяемая
формулой:
t
h max - h( )
100 %
h( )
ВРЕМЕНЕМ РЕГУЛИРОВАНИЯ называется
момент времени tР , когда график переходной
функции h(t) входит в “трубку” 5% h( ) и в
дальнейшем не выходит из нее.