










")
")
 Физика
ФизикаПохожие презентации:









")
Уравнения Лагранжа ii рода. Обобщённые координаты, скорости и силы
1. УРАВНЕНИЯ ЛАГРАНЖА II РОДА. ОБОБЩЁННЫЕ КООРДИНАТЫ, СКОРОСТИ И СИЛЫ.
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ.Динамика
ЛЕКЦИЯ 12
2. Цель введения обобщенных координат, скоростей и сил
2Определять положение любой точки механической
системы
Научиться описывать движение механической системы с
несколькими степенями свободы
3. ОБОБЩЕННЫЕ КООРДИНАТЫ
Обобщенные координаты – это независимые междусобой параметры любой размерности, однозначно
определяющие положение механической системы в
пространстве.
3
Обобщенные координаты
4. ПОНЯТИЕ СТЕПЕНИ СВОБОДЫ
Число независимых между собой возможныхперемещений МС называется числом степеней
свободы системы.
z
y
У механической системы с голономными
связями число обобщенных координат
совпадает с числом её степеней свободы
х
S 3
S 6
4
Обобщенные координаты
5. КОЛИЧЕСТВО СТЕПЕНЕЙ СВОБОДЫ
Если бы система была свободной, то все 3N декартовыхкоординат ее точек были бы независимыми.
В несвободной механической системе 3N декартовых координат ее
точек должны удовлетворять mуравнениям связей, поэтому
независимыми среди них будут только S 3N m координат.
1
2
( x1 x2 ) 2 ( y1 y2 ) 2 ( z1 z2 ) 2 L2
m 1
5
Обобщенные координаты
s 5
6. КОЛИЧЕСТВО СТЕПЕНЕЙ СВОБОДЫ
У свободного твёрдого тела6 степеней свободы:
3 поступательных вдоль осей
координат и 3 вращательных
вокруг этих осей.
6
Обобщенные координаты
7. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ТОЧЕК МС
Обобщенные координаты будем обозначать буквой Тогда радиус-векторы всех точек системы можноопределить как функцию обобщенных координат
rk rk (q1, q2....qs )
7
Обобщенные координаты
k 1, 2, 3...n
q
8. ОБОБЩЁННЫЕ СКОРОСТИ
При движении системы её обобщённые координаты будут менятьсясо временем по закону
q1 f1(t),q2 f 2(t),qs f s (t)
- кинематическое уравнение движения в обобщённых координатах.
Производные от обобщённых координат по времени
называются обобщёнными скоростями
dq
q
dt
Размерность обобщённой скорости зависит от размерности
соответствующей обобщённой координаты.
8
Обобщенные скорости
9. ОБОБЩЁННЫЕ СИЛЫ
Рассмотрим МС, состоящуюточек, на
из n материальных
которые действуют силы F , F ...F
1
2
n
Пусть система имеет S степеней свободы и ее положение
,
...
определяется обобщенными координатами
1 2
s
qq q
rk rk (q1, q2....qs )
Сообщим системе такое независимое возможное перемещение,
при котором координата q1 получает приращение q1
а остальные координаты не изменяются.
Тогда каждый из радиус-векторов rk
элементарное приращение ( r )
k 1
9
Обобщенные силы
точек системы получит
10. ОБОБЩЁННЫЕ СИЛЫ
Поскольку изменяется только координата q1 , то ( rk )1вычисляется как частный дифференциал
rk
( rk )1
q1
q1
Тогда вычислим сумму элементарных работ всех
действующих сил на рассматриваемом перемещении.
A1 F1 ( r1 ) 1 F2 ( r2 )1 ... Fn ( r n )1
r1
r2
rn
F1
q1 F2
q1 ... Fn
q1 ;
q1
q1
q1
10
Обобщенные силы
11. ОБОБЩЁННЫЕ СИЛЫ
A1 F1 ( r1 )1 F2 ( r2 )1 ... Fn ( rn )1r1
r2
rn
F1
q1 F2
q1 ... Fn
q1 ;
q1
q1
q1
rk
A1 ( Fk
) q1 Q1 q1 ,
q1
Q1 - обобщённая сила, соответствующая координате q1
11
Обобщенные силы
12.
Если системе сообщить такое возможное перемещение, прикотором одновременно меняются все обобщенные
координаты, то сумма элементарных работ приложенных
сил на этом перемещении равна:
n
A
k 1
k
Q1 q1 Q2 q2 ... Qn qn
Обобщённые силы – это величины, равные
коэффициентам при приращениях обобщённых
координат в выражении полной элементарной работы
действующих на систему сил.
Размерность обобщённой силы равна размерности работы,
деленной на размерность соответствующей обобщённой
координаты.
12
Обобщенные силы
А
Q
q
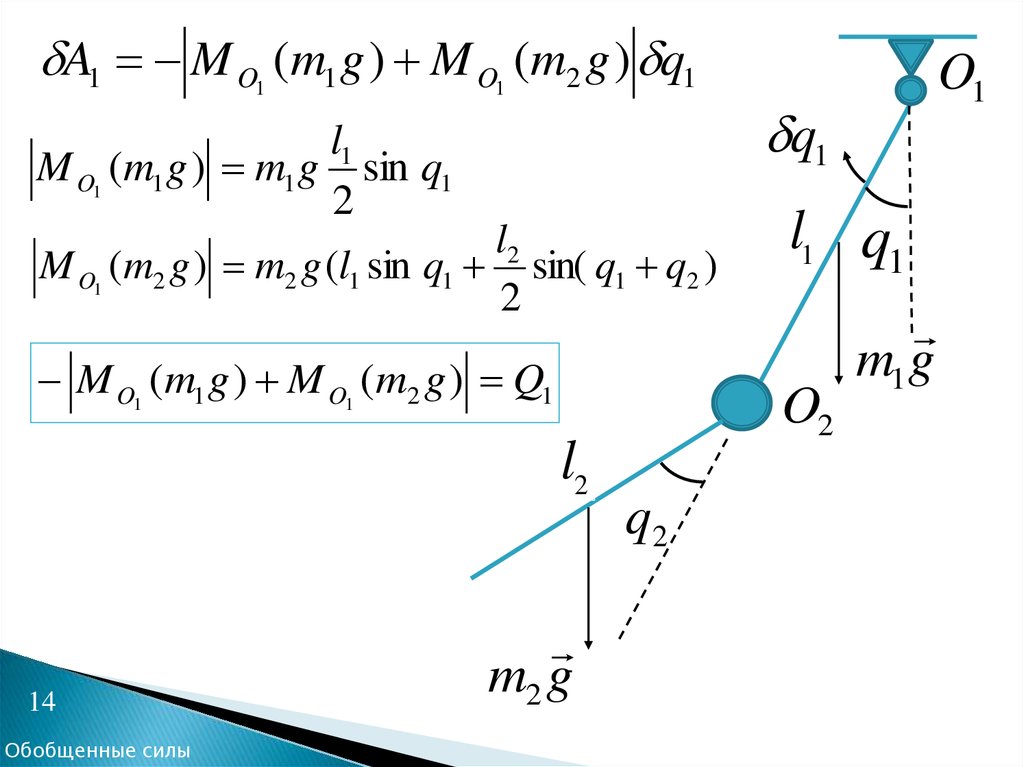
13. ПРИМЕР (ДВОЙНОЙ МАЯТНИК)
O1l1 q
1
l2
13
Обобщенные силы
O2
q2
14. ПРИМЕР (ДВОЙНОЙ МАЯТНИК)
A2 M O (m2 g ) q2O1
2
l2
M O2 (m2 g ) (m2 g ) sin( q1 q2 )
2
l2
(m2 g ) sin( q1 q2 ) Q2
2
q2
l2
13
Обобщенные силы
m2 g
q2
l1 q
1
O2
15.
A1 M O (m1 g ) M O (m2 g ) q11
1
q1
l1
M O1 (m1 g ) m1 g sin q1
2
l2
M O1 (m2 g ) m2 g (l1 sin q1 sin( q1 q2 )
2
M O1 (m1 g ) M O1 (m2 g ) Q1
l2
14
Обобщенные силы
O1
m2 g
l1 q1
O2
q2
m1 g