












 Электроника
ЭлектроникаПохожие презентации:










Функциональные элементы САР ЭПС: исполнительные и управляющие элементы
1.
Лекция 31. Функциональные элементы САР ЭПС: исполнительные и управляющие элементы.
1
Исполнительные элементы. На ЭПС со ступенчатым регулированием функции исполнительного элемента выполняет силовой контроллер, при помощи которого осуществляют переключение позиций силовой схемы.
Силовой контроллер, получив сигнал о переходе на новую позицию, отрабатывает его
через время τ. Поэтому при разработке систем управления силовым контроллером он может рассматриваться как звено запаздывания с передаточной функцией W(p)=epτ. Это накладывает ограничение на время Ту между сменой сигнала управления Ту≥τ.
На грузовых электровозах применение автоматики предпочтительно при использовании исполнительных элементов, обеспечивающих плавное экономичное управление работой тяговых двигателей. На ЭПС переменного тока основным исполнительным элементом
является управляемый выпрямитель, который может быть выполнен по диодно-тиристорной схеме (рис. 21) со статической характеристикой для относительного значения выпрямленного напряжения иd*= иd / иdмакс:
ud
ê âû ï ð
2
U 2 (1 cos ),
где квыпр 2 2 / 0,9 – коэффициент, значение которого определяется для мостовой
схемы выпрямителя; U2 – действующее значение переменного напряжения на вентильной обмотке.
2.
VS1ud *
M
1,0
VD1
0,8
U2
иd
L
VS2
VD2
0,6
0,4
0,2
α, град
30
Рис. 21
60
90
120
150
180
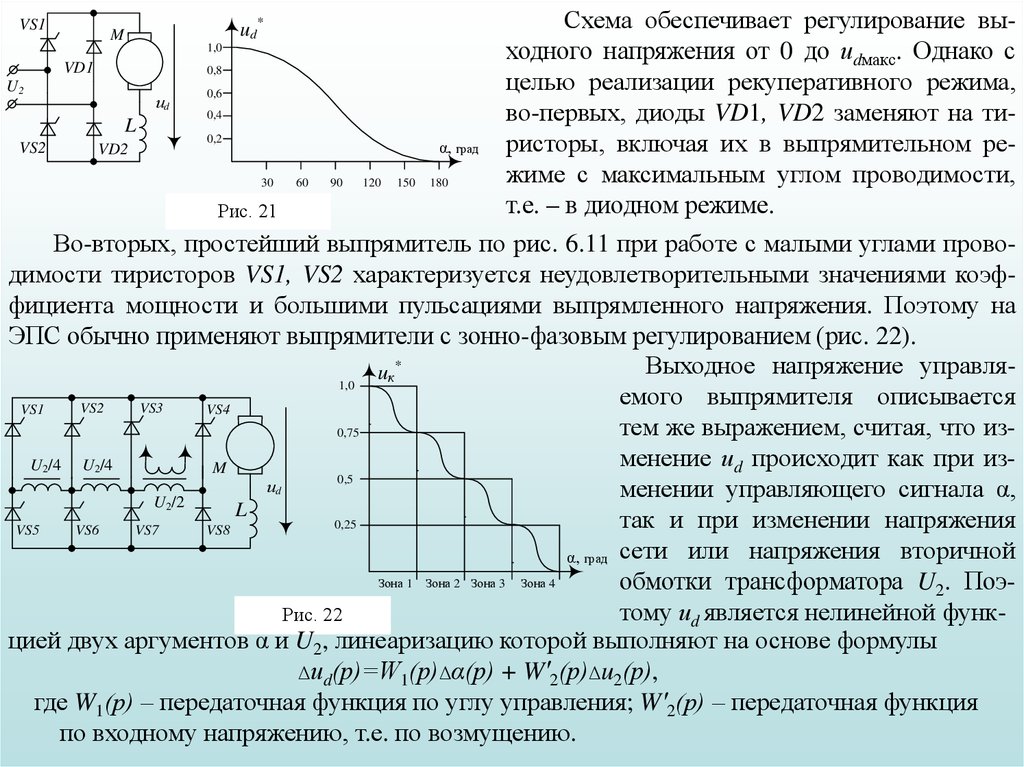
Схема обеспечивает регулирование выходного напряжения от 0 до иdмакс. Однако с
целью реализации рекуперативного режима,
во-первых, диоды VD1, VD2 заменяют на тиристоры, включая их в выпрямительном режиме с максимальным углом проводимости,
т.е. – в диодном режиме.
Во-вторых, простейший выпрямитель по рис. 6.11 при работе с малыми углами проводимости тиристоров VS1, VS2 характеризуется неудовлетворительными значениями коэффициента мощности и большими пульсациями выпрямленного напряжения. Поэтому на
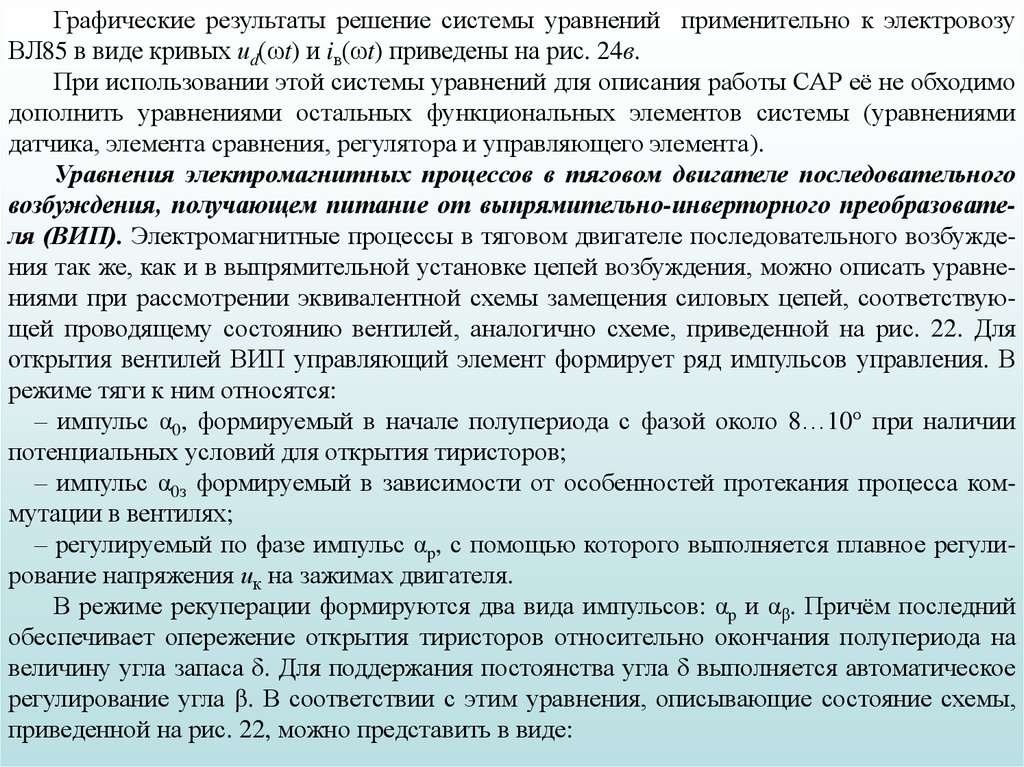
ЭПС обычно применяют выпрямители с зонно-фазовым регулированием (рис. 22).
Выходное напряжение управляuк*
1,0
емого выпрямителя описывается
VS2
VS3
VS1
VS4
тем же выражением, считая, что из0,75
менение иd происходит как при изU2/4 U2/4
M
0,5
иd
менении управляющего сигнала α,
U2/2
L
так и при изменении напряжения
0,25
VS5
VS6
VS7
VS8
α, град сети или напряжения вторичной
Зона 1 Зона 2 Зона 3 Зона 4
обмотки трансформатора U2. Поэтому иd является нелинейной функРис. 22
цией двух аргументов α и U2, линеаризацию которой выполняют на основе формулы
Δиd(р)=W1(р)Δα(р) + W′2(р)Δu2(р),
где W1(р) – передаточная функция по углу управления; W′2(р) – передаточная функция
по входному напряжению, т.е. по возмущению.
3.
Это уравнение может быть представлено в виде структурной схемы, приведенной нарис. 23, а передаточная функция входящая в выражение, соответствует усилительным
ê
ê
äè
du
звеньям:
W1 ( p) d âû ï ð U 20 sin 0 ; W2 ( p) d âû ï ð (1 cos 0 ).
äα
2
äU 2
2
Δик
Здесь индексом «нуль» обозначены исходные начальные зна-чения
Δα
W1
аргументов. При более детальном рассмотрении процессов,
возникающих в цепи «тиристорный преобразователь–тяговый двиΔи2
гатель», необходимо составить соответствующую систему нелинейW2
ных дифференциальных уравнений.
Уравнения электромагнитных процессов в выпрямительной
Рис. 23
установке цепей возбуждения. Силовая схема выпрямительной
установки возбуждения (рис. 24а) включена на одну эквивалентную обмотку возбуждения
ОВ тягового двигателя, зашунтированную сопротивлением r3. Управление этой установкой осуществляется импульсами, поступающими от управляющего элемента в моменты
времени αp1/2πfc и αp2/2πfc положительного и отрицательного полупериодов на вентили VS1,
и VS2 соответственно (рис. 246).
Допустим, что в исходном состоянии этой схемы вентиль VS2 был открыт, тогда при
подаче управляющего импульса в момент αp1/2πfc открывается вентиль VS1 и возникает
процесс коммутации, в результате которого происходит запирание вентиля VS2. Цепь тока
(рис. 24в) содержит ЭДС етр полуобмоток трансформатора, индуктивные и активные сопротивления этих полуобмоток Lтр и rтр и обмотки возбуждения Lв и rв. Кроме того, учитывается влияние контура вихревого тока iвих с параметрами Lвих и rвих. Уравнения для этого
состояния схемы имеет вид:
4.
eтр е20 sin[( k 2) f ct ], k 0 ,1,2,...;diтр1
1
[етр rтрiтр1 rш ( iтр1 iтр2 iв )]G1 ;
dt
Lтр
diтр2
1
[eтр rтрiтр2 rш ( iтр1 iтр2 iв )]G2 ;
dt
Lтр
diв
1
[rвiв rш ( iтр1 iтр2 iв )];
dt Lвэ (iв )
dФ rвих ( Fв iв wв )
; Fв f (Ф),
2
dt
2 ра wвих
где G1, G2 – логические функции;
(1)
dLв (iв ) – динамическая индукdiв
тивность обмотки возбуждения; Fв=wвiв-wвихiвих – намагничивающая сила обмотки
возбуждения; wв и wвих – количество витков соответственно обмоток возбуждения и
контура вихревых токов; ра – количество пар полюсов; σ – коэффициент рассеяния.
Зависимость Fв =f(Ф) является обратной по отношению кривой намагничивания Ф=
F(Fв).
Завершением этого процесса является запирание вентиля VS2, которое произойдет в
момент времени (αp1+γ)/(2πfc). Начиная с этого момента ток протекает только по первой
полуобмотке трансформа тора. Уравнения для этого режима можно получить из системы,
приняв ток iтр2 и производную diтр2/dt равными нулю.
В момент времени (π+αp2)/(2πfc) подается управляющий импульс на вентиль VS2. Этот
вентиль открывается и начинается новый процесс коммутации, в результате которого произойдет запирание вентиля VS1.
Lвэ (iв ) Lв (iв ) iв
5.
Такой режим работы соответствует схеме на рис. 24в при обратном направлениипоказанном на этом рисунке штриховыми стрелками, и описывается теми же
уравнениями. После запирания VS1 в момент времени (π+αp2+γ)/(2πfc) ток протекает
только по второй полуобмотке трансформатора. Уравнения для этого режима работы
схемы можно также получить из системы, приняв ток iтр1 и производную diтр1/dt равными
нулю.
Подача следующего управляющего импульса на
е
е
а)
б)
вентиль VS1 в момент (2π+αp1)/(2πfc) вызовет но-вый
Т
ωt
L
L
процесс коммутации токов по схеме, приведён-ной
γ
α
VS2
VS1
α
на рис. 24в, и начнется второй цикл работы выL
r
γ
u
ωt прямительной установки возбуждения. Для получеi
ния обобщённой записи уравнений (1) состояния
ωt
схемы, приведёне
е
в)
r
r
Таблица 1
L
L
ной на рис. 24а, в
е
е
Значение
i
систему уравнелогической
Момент времени
функции
L
L
r
ний дополнительi
G
G
i
r
но введены логи1
1
r
ческие
функции
i
i
G1 и G2 (табл. 1),
1
0
которые
в
зависиРис. 24
мости от подачи
1
1
управляющих импульсов могут принимать одно из
двух значений – 0 или 1.
0
1
тр
тр
тр
тр
ш
2
p2
p1
1
сх
в
тр
тр
тр
тр
тр
тр
тр
тр
вих
вих
вэ
тр1
в
ш
вих
тр2
ш
в
1
2
6.
Графические результаты решение системы уравнений применительно к электровозуВЛ85 в виде кривых иd(ωt) и iв(ωt) приведены на рис. 24в.
При использовании этой системы уравнений для описания работы САР её не обходимо
дополнить уравнениями остальных функциональных элементов системы (уравнениями
датчика, элемента сравнения, регулятора и управляющего элемента).
Уравнения электромагнитных процессов в тяговом двигателе последовательного
возбуждения, получающем питание от выпрямительно-инверторного преобразователя (ВИП). Электромагнитные процессы в тяговом двигателе последовательного возбуждения так же, как и в выпрямительной установке цепей возбуждения, можно описать уравнениями при рассмотрении эквивалентной схемы замещения силовых цепей, соответствующей проводящему состоянию вентилей, аналогично схеме, приведенной на рис. 22. Для
открытия вентилей ВИП управляющий элемент формирует ряд импульсов управления. В
режиме тяги к ним относятся:
– импульс α0, формируемый в начале полупериода с фазой около 8…10° при наличии
потенциальных условий для открытия тиристоров;
– импульс α0з формируемый в зависимости от особенностей протекания процесса коммутации в вентилях;
– регулируемый по фазе импульс αp, с помощью которого выполняется плавное регулирование напряжения ик на зажимах двигателя.
В режиме рекуперации формируются два вида импульсов: αp и αβ. Причём последний
обеспечивает опережение открытия тиристоров относительно окончания полупериода на
величину угла запаса δ. Для поддержания постоянства угла δ выполняется автоматическое
регулирование угла β. В соответствии с этим уравнения, описывающие состояние схемы,
приведенной на рис. 22, можно представить в виде:
7.
eòð å20 sin[(k 2) f ct ], k 0,1,2,...;diòð
dt
åòðG2 [eòð (rñð rä )iä rø (iä iâ ) ròðiòð ]G1
Lòð [ Läý (iä ) Lñðý (iä )]G1
;
diä [(eòð iòð ròð )G2 rø (iä iâ ) (rñð rä )iä G1 ]G1
;
dt
LòðG1 Läý (iä ) Lñðý (iä )
diê 1
( åê rê iê )G3
dt Lê
(2)
diâ
1
[râiâ rø (iä iâ )];
dt Lâý (iâ )
dÔ râèõ ( Fâ iâ wâ )
; Fâ f (Ô),
2
dt
2 ðà wâèõ
где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора; rд – сопротивление тягового двигателя.
Здесь iк, Lк и rк характеризуют цепь фазовой коммутации. Значения етр, Lтр и rтр определяются номером зоны регулирования.
Для описания электромагнитных переходных процессов в режиме рекуперации из сисмы уравнений (2) необходимо исключить составляющие, относящиеся к обмотке возбуждения. Значения логических функций G1, G2 и G3, как и для выпрямительной установки
цепей возбуждения, определяются интервалами расчета мгновенных схем замещения,
соответствующих проводящим состояниям вентилей.
8.
На ЭПС постоянного тока плавное экономичное регулирование возможно при помощиимпульсных преобразователей (рис. 25а и б).
Обычно используемые для этих
ИП
а)
б)
i
целей импульсные преобразователи с
VD2
VS1
I
параллельной емкостной коммутацией
и
M
VD1
C
и
имеют
линейную
статическую
t
L2
τ
характеристику (рис. 6.15в):
t
и
VS2
VD3
и
икс / икс kuкс .
L1
к
г)
τ
t
п
и
i
L1
в)
Для реальных импульсных преоби /и
XA
i
1,0
M
разователей необходимо учесть инер0,8
i
0,6
ционность, связанную с наличием
и
0,4
C
входного фильтра, обладающего ин0,2
VD3
τ/t
дуктивностью L1, активным сопротивi L
0,2
0,4
0,6
0,8
1,0
лением r1 и ёмкостью С (рис. 25г).
τ /t
τ /t
Пренебрегая дискретностью и
Рис. 25
запаздыванием собственно импульсного преобразователя, работу схемы, приведенной на рис. 6.2г, для усредненных за период
tп ‚ параметров электромагнитного процесса в фильтре можно описать системой дифференциальных уравнений при малых отклонениях всех переменных (3).
д
д
кс
к
п
кс
кс
1
к
кс
кс
C
к
п
д
мин п
макс п
9.
d iêñr1 iêñ è Ñ è êñ ;
dt
d è êñ
Ñ
i1 iêñ ;
dt
è ê fuC 0 f uÑ ;
L1
(3)
d iä
rä iä uê åä ;
dt
i1 fiä0 f iä .
Läý
Уравнения для Δик и Δi1 получены линеаризацией по формуле полного дифференциала.
Эти же уравнения в операторной форме:
è ( ð ) Wô 1 ( ð) è êñ ( ð) Wô 2 ( ð) i1 ( p);
Ñ
è ( ð) Wèïè 1 ( ð) ( ð) Wèïè 2 ( ð) è Ñ ( ð);
ê
i ( ð ) Wä ( ð) è ê ( ð);
(4)
ä
i ( p ) Wèïi 1 ( p) Wèïi 2 ( p) iä ( ð).
1
Передаточные функции:
фильтра
Wф1 ( р)
1
;
L1Cp 2 r1Cp 1
Wф2 ( р)
L1 p r1
1;
L1Cp 2 r1Cp
импульсного преобразователя
è
è
по напряжению Wèï 1 ( ð) fuC 0 ; Wèï 2 ( ð) f 0 ;
i
по току Wип1 ( p) fiд0 ;
i
и
Wип2
( p) f 0 Wип2
( р);
10.
передаточная функция тягового двигателя последовательного возбуждения (лекция 2)п
к
i
u
Wд ( р) Wi пu ( р )
.
1 Т iп u р
Выражения передаточных функций по напряжению и току получены на основе линеаризации третьего и пятого уравнений системы (3). В качестве аргументов были приняты
малые отклонения управляющего сигнала Δτ, а также напряжения ΔиС и Δiд тока от исходного состояния, характеризуемого величинами τ0, ΔиС0 и Δiд0.
Структурная схема, соответствующая системе уравнений (4), приведена на рис. 26а.
Эта схема преобразуется, т.е. переносится сумматор с выхода звена на его вход, а со входов звеньев на их выходы (рис. 26б). При этом:
к
к
к
Wý1 ( ð) W ( ð)Wä ( ð)
è
èï 1
fuC 0 êiï uê
1 Òiï uê
;
Wèïi 1 ( p) iä0
Wý2 ( ð) i
;
Wèï 2 ( p) 0
Wý3 ( ð) W ( ð)Wô 2 ( ð)W ( p)Wä ( ð ) f
è
èï 2
i
èï 1
2 2
0
êiï uê
1 Òiï uê
L1 p r1
;
L1Cp 2 rCp
1
1
êiï uê
f 0
Wý4 ( ð) Wô 1 ( ð)W ( ð)Wä ( ð )
.
ï
L1Cp 2 rCp
1
1
Ò
ð
1
i uê
è
èï 2
На следующем этапе точка разветвления координаты Δiд(р) перенесится через сумматор, после чего точка разветвления переносится с выхода звена на его вход и преобразуется первый сумматор (рис. 26г). В этой схеме исключены все местные связи и система (4)
представлена в виде окончательной структурной схемы (рис. 26д), для которой
iä ( ð) Wý5 ( ð) ( ð) Wý6 ( ð) è êñ ( ð),
11.
гдеWэ5 ( р)
Wэ1 ( р) Wэ2 ( р)
Wэ4 ( р)
Wэ2 ( р); Wэ3 ( р)
.
1 Wэ3 ( р)
1 Wэ3 ( р)
Wиип2
Δτ
Δик
Wиип1
Wд
Wэ3
WФ1
Δикс
Δiд
а)
Wiип1
Δе
б)
Wiип2
Δτ
WФ2
Wэ4
Δiд
Wэ1
Wэ2
в)
г)
д)
Δикс
Δτ
Wэ4
Δикс
Wэ3
Δiд
Δiд
Δτ
Wэ3
Wэ4
Δикс
-
Wэ1
Wэ6
Δiд
Wэ1
Δτ
Wэ5
Δiд
Wэ2
Wэ2
Wэ2
Рис. 26
Рассмотренное представление тягового электропривода с импульсным преобразователем как линеаризованной системы позволило использовать для его описания передаточные функции и соответственно линейные методы расчета систем автоматического регулирования.
Существенная особенность импульсных преобразователей связана с ограниченностью диапазона регулирования выходного напряжения, поскольку коэффициент заполнения k=Δτ/tп при включении тяговых двигателей, т.е. при трогании поезда, обычно можно
12.
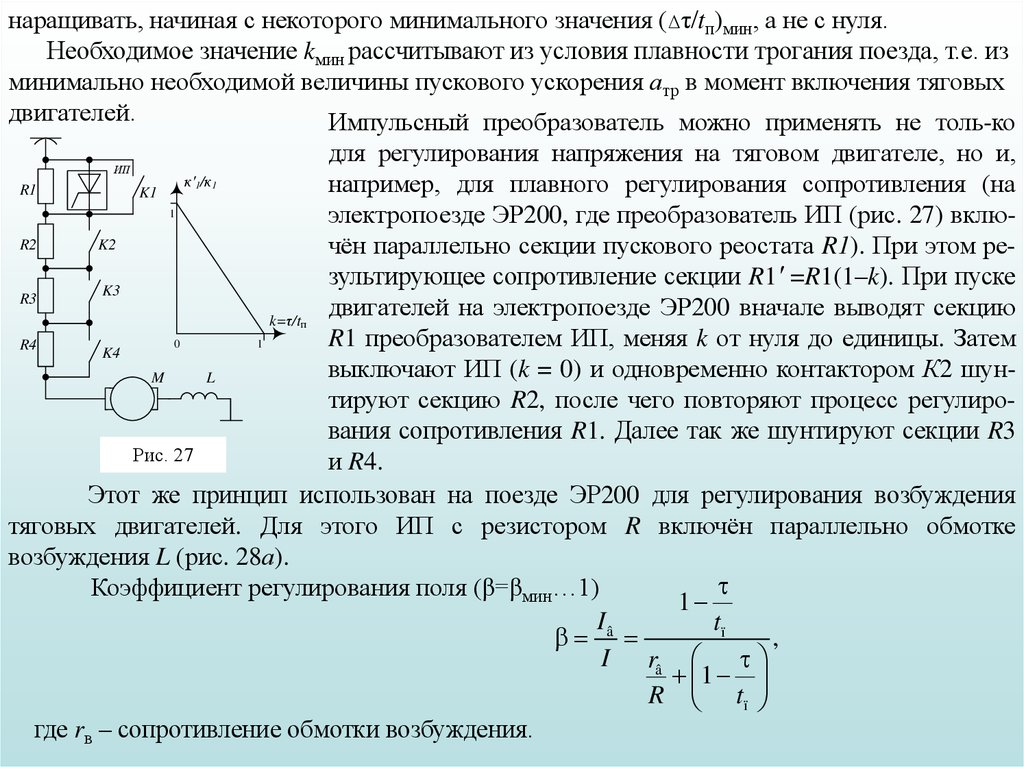
наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля.Необходимое значение kмин рассчитывают из условия плавности трогания поезда, т.е. из
минимально необходимой величины пускового ускорения атр в момент включения тяговых
двигателей.
Импульсный преобразователь можно применять не толь-ко
для регулирования напряжения на тяговом двигателе, но и,
к′ /к
например, для плавного регулирования сопротивления (на
R1
K1
1
электропоезде ЭР200, где преобразователь ИП (рис. 27) вклюR2
K2
чён параллельно секции пускового реостата R1). При этом результирующее сопротивление секции R1′ =R1(1–k). При пуске
K3
R3
двигателей на электропоезде ЭР200 вначале выводят секцию
k=τ/t
R1 преобразователем ИП, меняя k от нуля до единицы. Затем
0
1
R4
K4
выключают ИП (k = 0) и одновременно контактором К2 шунM
L
тируют секцию R2, после чего повторяют процесс регулирования сопротивления R1. Далее так же шунтируют секции R3
Рис. 27
и R4.
Этот же принцип использован на поезде ЭР200 для регулирования возбуждения
тяговых двигателей. Для этого ИП с резистором R включён параллельно обмотке
возбуждения L (рис. 28а).
Коэффициент регулирования поля (β=βмин…1)
1
I
tï
â
,
I râ
1
R tï
где rв – сопротивление обмотки возбуждения.
ИП
1
1
п
13.
Регулировочная характеристика, показанная на рис. 28а, существенно нелинейна, причём характер нелинейности зависит от соотношения rв /R. Исполнительный элемент ИПописывается передаточной функцией W(р) = dβ/dτ. Для реализации линейной регулировочной характеристики β=β(τ) используют схему ИП с двумя поочерёдно включаемыми тиристорными ключами ИП1 и ИП2 (рис. 28б), имеющими общее устройство искусственной
коммутации УИК. Эта схема имеет регулировочную характеристику
i
M
1
M
β
iв
1,0
iв
0,8
ИП
0,8
L
0,6
L
0,6
R
0,4
R
0,2
ИП2
k
ИП1
0,2 0,4 0,6 0,8 1,0
а)
β
1,0
0,4
0,2
k
tï
râ
1
R
,
которая линейна во всем диапазоне изменения τ.
0,2 0,4 0,6 0,8 1,0
ИП
УИК
б)
Рис. 28
Управляющие элементы. Т.к. исполнительным элементом в САР ЭПС является тиристорный преобразователь постоянного или переменного тока, то возникает необходимость в специальных управляющих элементах УЭ (рис. 29), которые должны на базе аналоговых или цифровых сигналов иу, поступающих с выхода регулятора Р, вырабатывать
управляющие сигналы для включения тиристоров исполнительного элемента.
Принципиальные схемы УЭ:
– с гальваническим разделением, выполненном на выходе формирователя импульсов управления ФИ (рис. 29а);
14.
УЭ– с гальваническим разделением, выполненном на выхоИТ
де усилителя импульсов управления УМ (рис. 29б).
VD
Гальваническим разделением может быть импульсΔ
и ФИ
R
Р
УМ
ный трансформатор ИТ (рис. 29) или оптронный элемент
типа «светодиод–фототиристор», «светодиод–фототранУЭ
б)
зистор» и т. д.
VS
Более детальное рассмотрение структурных схем цеИТ
VD
пей управления полупроводниковыми приборами расΔ
R
Р
ФИ
УМ
и
сматривается в курсе «Электронные импульсные системы управления электрическим транспортом».
В тиристорных преобразователях постоянного и переРис. 29
менного тока функции УЭ примерно одинаковы и сводятся к реализации регулируемой задержки времени включения тиристора по отношению к
некоторому фиксированному моменту времени В преобразователях переменного тока
указанный фиксированный момент времени – это переход переменного напряжения через
нуль. Фиксация момента перехода осуществляется блоком синхронизации БС (рис. 30),
который дает сигнал и на запуск генератора пилообразного напряжения ГПН. Выходное
напряжение этого генератора сравнивают в элементе сравнения ЭС с управляющим напряжением, которое в форме аналогового сигнала поступает в управляющий элемент с выхода регулятора. В момент равенства напряжений (иу=иГПН) узел сравнения выдаёт импульс. Далее эти импульсы распределяют по каналам управления тиристорами при помощи распределителя импульсов РИ, а затем через усилители мощности УМ импульсов управления – на тиристоры.
Если импульсы управления для включения всех тиристоров преобразователя формируются в одном канале, то такие системы называют одноканальными.
а)
VS
у
у
15.
Блок синхронизации БС (рис. 30) – это усилитель в режиме нуль-органа, сравнивающий напряжение переменного тока с напряжением источника нулевого потенциала. Сложность выполнения БС связана с сильными искажениями напряжения в контактной сети.Переход через нуль может иметь место несколько раз в начале каждой полуволны, поэтому для правильности отсчета фазы на входе БС необходимо устанавливать фильтр Ф, который обеспечивает передачу на вход БС основной гармоники питающего напряжения.
В качестве ГПН используют опеК управляющим электродам тиристоров
и
рационный усилитель в режиме инωt
тегратора, подключая его к источниУМ
УМ
УМ
УМ
ку стабильного напряжения. Тогда
и
РИ
выходной сигнал этого усилителя
и
ωt
будет представлять собой линейно
ЭС
и =α
нарастающее в функции времени
и
и
ГПН
ωt
напряжение (так называемое пилоt
и
образное напряжение).
и
и
ωt
и
Узел сравнения ЭС также выполФ
БС
и
и
ωt
α
няют на операционном усилителе,
но без элементов обратной связи.
Рис.30
Такой усилитель, имея очень боль5
коэффициент усиления (до 10 ) при любых соотношениях сравниваемых сигналов будет
выдавать на выходе максимальное напряжение и лишь в момент равенства входных сигналов выходной сигнал кратковременно принимает нулевое значение; этот сигнал и используют для формирования отпирающих импульсов.
Аналогичным образом выполняют и управляющие элементы для преобразователей по2
2Ф
α
α
зад
ГПН
сх
у
2
2Ф
ГПН
α
16.
стоянного тока.Более надёжными и помехозащищёнными являются цифровые системы (рис. 6.21), которые обеспечивают высокую стабильность и точность регулирования фазы. Схема цифрового УЭ для импульсного преобразователя содержит регистр Рг, на котором на котором зафиксировано заданное значение фазы, т. е. длительности выходного импульса преобразователя в форме двоичного кода.
Это значение сравнивают с
Р
Рг
содержимым тактового счётчиЗГ
t
ка СчТ, который подключен к
ЭС
ГТИ
t
выходу генератора тактовых
импульсов ГТИ высокой частоГТИ
СчТ
ты 20…50 кГц. Сравнение коРг
дов Рг и ТСч осуществляется
t
С
СчТ
VS2
PU
VS1
схемой сравнения ЭС. В моVD
ЭС
L
мент равенства кодов ЭС генеt
рирует импульс на включение
гасящего тиристора VS2. ВклюРис. 31
чение главного тиристора VS1
осуществляется задающим генератором импульсов ЗГ, частота которого равна рабочей частоте преобразователя.