







 Физика
Физика Электроника
ЭлектроникаПохожие презентации:









")
Експериментальне дослідження системи частотно-регульованого електропривода
1. Експериментальне дослідження системи частотно-регульованого електропривода
Виконав: студент АУТПм-52ННІ АКОТ
Олексієвець А.П.
2.
Проведемо дослідження розробленоїсистеми автоматичного регулювання
швидкості обертання асинхронного двигуна
з використанням частотного перетворювача.
Дослідження САК буде проводитись в три
етапи:
моделювання перехідного процесу за
допомогою ПК;
оптимізація параметрів регулятора;
дослідження характеристик.
3.
При моделюванні напівпровідниковихсистем електропривода використовуються в
основному три типи моделей:
функціональні моделі;
структурні моделі;
віртуальні моделі.
4. Моделювання перехідного процесу в середовищі MATLAB
Для моделювання системи автоматичного регулювання швидкостіобертання асинхронного двигуна з використанням частотного
перетворювача скористаємося структурною схемою лінеаризованої
системи перетворювач частоти - асинхронний двигун
Структурна схема лінеаризованої системи ЧП-АД
-
-
-
Де :
електромагнітна стала часу
модуль жорсткості лінеаризованої
механічної характеристики
електромеханічна стала часу
ТЕ
Тм
1
0, ЕЛ ,ном s к
2Ì
ê
0,íîì sê
J 0.ном
МП
5. Параметри двигуна
ПараметрЗначення
Розмірність
P ном.
0,93
кВт
Іном.
3,05
А
Uном.
220
В
n ном.
2850
об/хв
J
0,00605
Кг*м2
6. За технічними характеристиками двигуна визначимо:
номінальну кутову швидкість:-
О ,ном
2 3,14 2850
298,3
60
Î , ÅË ,íîì
Рн
н
2 nн
60
2 3,14 3000
314
60
930
-
номінальний момент: М н 298,3 3,117
н
М
2
М
к
н 6,234
критичний момент:
пусковий момент: Ì Ï 1.2Ì Í 3.75(H m)
-
ковзання:
-
sk 0,05(2 2 2 1) 0,25
Підставивши відповідні значення у вирази, отримаємо:
ÒÅ
1
0,0133(ñ)
314 0,24
2 6,234
0,23( Hìc )
298,3 0,186
Tì
0,00605 298,3
0,48(c)
3,75
7.
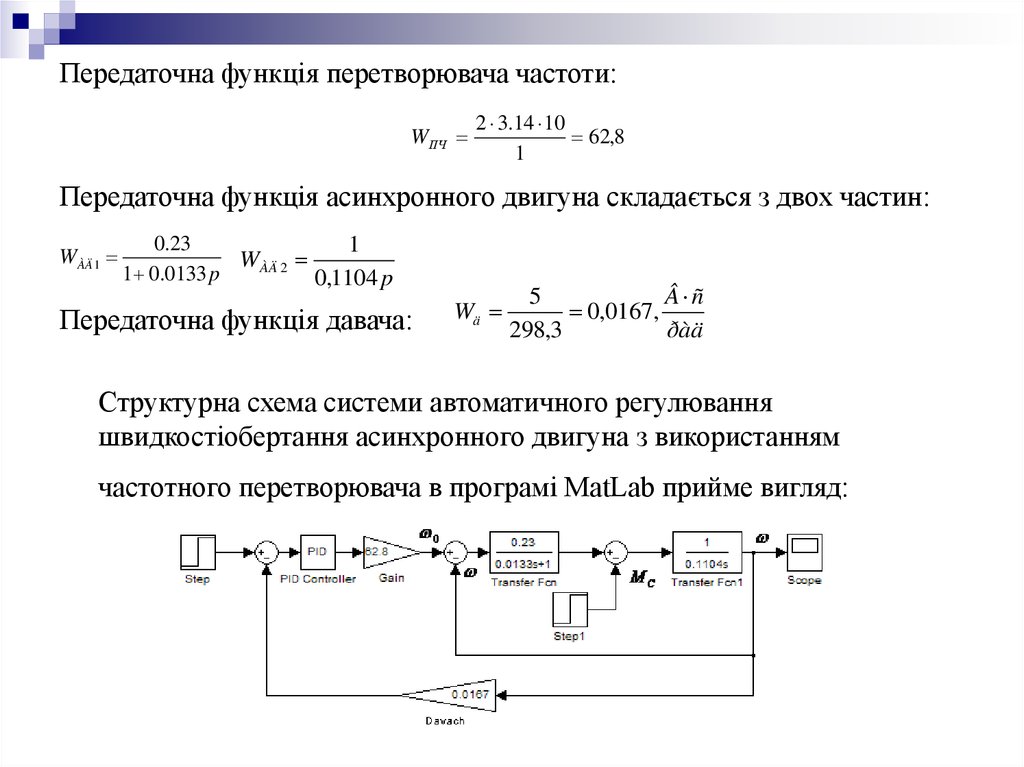
Передаточна функція перетворювача частоти:W ПЧ
2 3.14 10
62,8
1
Передаточна функція асинхронного двигуна складається з двох частин:
WÀÄ 1
0.23
1
WÀÄ 2
1 0.0133 p
0,1104 p
Передаточна функція давача:
Wä
5
 ñ
0,0167,
298,3
ðàä
Структурна схема системи автоматичного регулювання
швидкостіобертання асинхронного двигуна з використанням
частотного перетворювача в програмі MatLab прийме вигляд:
8. Оптимізація параметрів регулятора
Для визначення оптимальних настроювальних параметріврегулятора скористаємося програмою MatLab, зокрема її
пакетом NCD. За допомогою даного пакету можна
настроювати параметри моделі, в якості яких може бути
довільна кількість змінних. Задавання динамічних
обмежень здійснюється у візуальному режимі, а хід
оптимізації – на екрані за допомогою відображення
графіка перехідного процесу і поточних значень функції,
що оптимізується.
9.
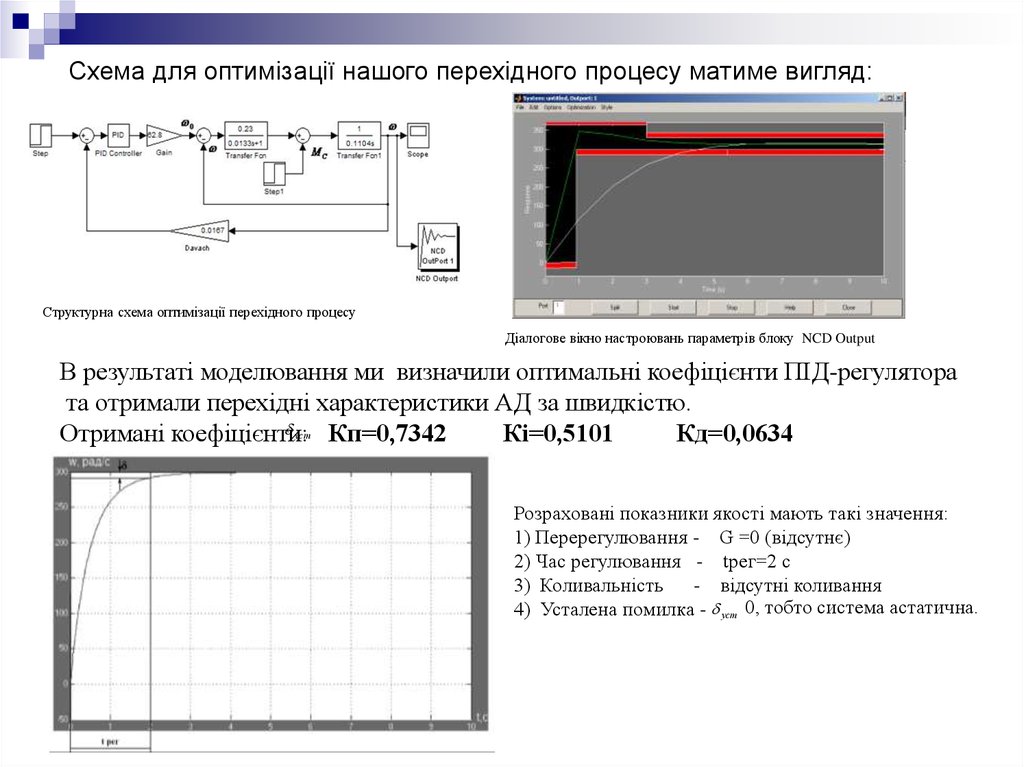
Схема для оптимізації нашого перехідного процесу матиме вигляд:Структурна схема оптимізації перехідного процесу
Діалогове вікно настроювань параметрів блоку NCD Output
В результаті моделювання ми визначили оптимальні коефіцієнти ПІД-регулятора
та отримали перехідні характеристики АД за швидкістю.
Отримані коефіцієнти:
Кп=0,7342
Кі=0,5101
Кд=0,0634
уст
Розраховані показники якості мають такі значення:
1) Перерегулювання - G =0 (відсутнє)
2) Час регулювання - tрег=2 c
3) Коливальність - відсутні коливання
4) Усталена помилка - уст 0, тобто система астатична.
10. Дослідження реальних перехідних характеристик
Для зняття реальних перехідних характеристик роботи двигуна буланаписана програма прийому даних з контролера по СОМ-порту та
графічного їх відображення.
По перехідній характеристиці АД за
швидкістю, отриманій у ході даної роботи
можна зробити висновок, що система стійка і
має такі прямі показники якості:
1) Перерегулювання - G =0 (відсутнє)
2) Час регулювання - tрег=3 c
3) Коливальність - відсутні коливання
4) Усталена помилка =0, тобто система астатична.
Реальна перехідна характеристика АД за швидкістю при оптимальних значеннях коефіцієнтів ПІД- регулятора.
11. Для зняття експериментальних перехідних характеристик привода при зміні навантаження склали схему, яка зображена
Вона складається з електромашинного підсилювача, перетворювача частоти ПЧ,давача швидкості nE (давач Хола), контролера МК 1305, вимірювальних приладів
та персонального комп’ютера (ПК).
12.
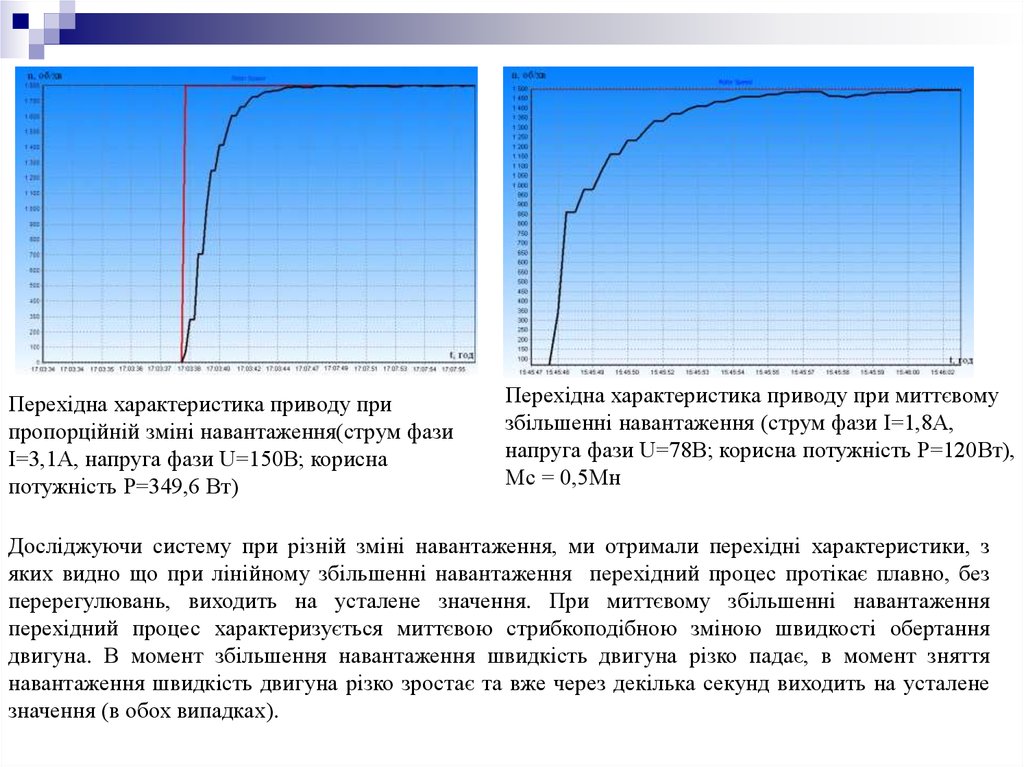
Перехідна характеристика приводу припропорційній зміні навантаження(струм фази
І=3,1А, напруга фази U=150В; корисна
потужність Р=349,6 Вт)
Перехідна характеристика приводу при миттєвому
збільшенні навантаження (струм фази І=1,8А,
напруга фази U=78В; корисна потужність Р=120Вт),
Мс = 0,5Мн
Досліджуючи систему при різній зміні навантаження, ми отримали перехідні характеристики, з
яких видно що при лінійному збільшенні навантаження перехідний процес протікає плавно, без
перерегулювань, виходить на усталене значення. При миттєвому збільшенні навантаження
перехідний процес характеризується миттєвою стрибкоподібною зміною швидкості обертання
двигуна. В момент збільшення навантаження швидкість двигуна різко падає, в момент зняття
навантаження швидкість двигуна різко зростає та вже через декілька секунд виходить на усталене
значення (в обох випадках).
13.
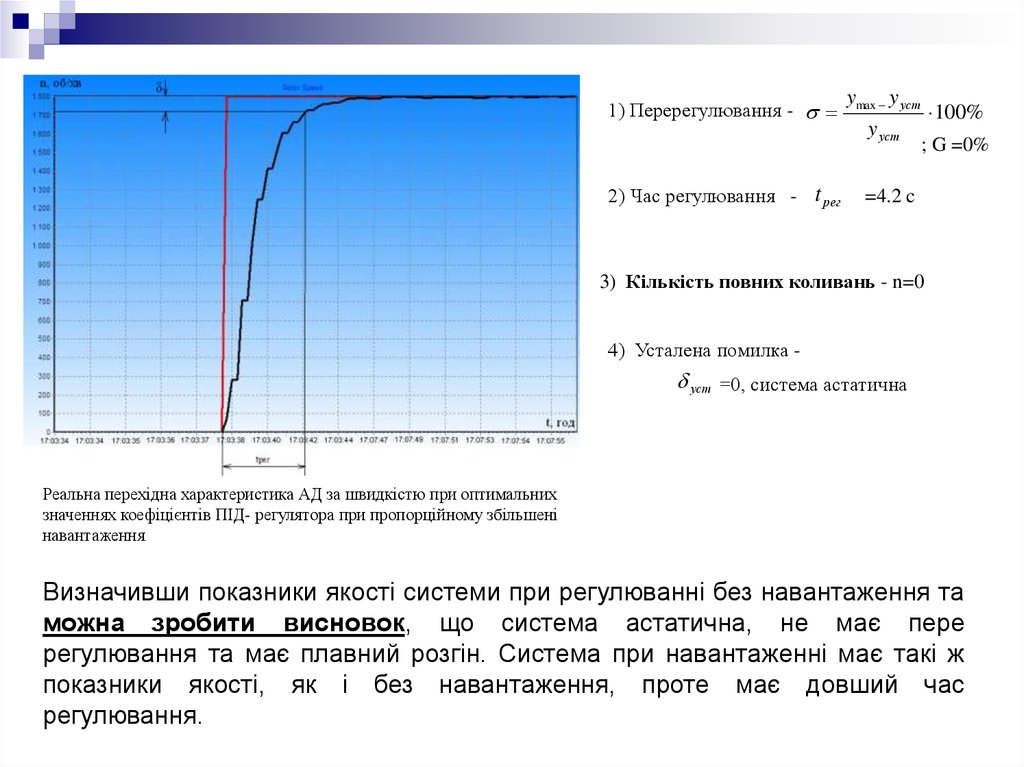
1) Перерегулювання -2) Час регулювання - t рег
ymax y уст
y уст
100%
; G =0%
=4.2 c
3) Кількість повних коливань - n=0
4) Усталена помилка -
уст =0, система астатична
Реальна перехідна характеристика АД за швидкістю при оптимальних
значеннях коефіцієнтів ПІД- регулятора при пропорційному збільшені
навантаження
Визначивши показники якості системи при регулюванні без навантаження та
можна зробити висновок, що система астатична, не має пере
регулювання та має плавний розгін. Система при навантаженні має такі ж
показники якості, як і без навантаження, проте має довший час
регулювання.