






























 Промышленность
ПромышленностьПохожие презентации:





")




Локомотивные системы безопасности движения
1.
МКЖТ ИПТЛокомотивные системы
безопасности движения
2.
КОМПЛЕКСНОЕЛОКОМОТИВНОЕ
УСТРОЙСТВО
БЕЗОПАСНОСТИ
УНИЦИФИРОВАННОЕ
КЛУБ-У
3.
ОАО «РЖД»ЦУП
4.
СОСТАВ И РАЗМЕЩЕНИЕ ОСНОВНЫХ БЛОКОВ КЛУБУБИЛ-У
Антенна РК
ППУ-РС
Антенна СНС
ЭПК
БВД-У
БКР-У
РБ, РБС
ДПС
БЭЛ-У
5.
ФУНКЦИИ СИСТЕМЫ КЛУБ-Уприём информации каналов АЛСН и АЛС-ЕН с защитой от ложного приёма разрешающего
сигнала из канала АЛС-ЕН при сходе изолирующих стыков;
отслеживание проследования границ блок-участков при приёме информации из канала
АЛС-ЕН по смене синхрогрупп сигнала;
обмен информацией со станционными, переездными и другими устройствами цифровой
радиосвязи на частоте 160 МГц, включая устройства оповещения работающих на путях;
приём сигналов от систем локомотива: о включении/ выключении тяги, переключении
управления на вторую кабину, о положении крана машиниста и ключа ЭПК, о давлении в
тормозных цилиндрах, тормозной магистрали и уравнительных резервуарах;
формирование информации о значениях целевой и допустимой скорости движения с учетом
данных об ограничениях заложенных в электронную карту участка;
определение параметров движения поезда (железнодорожной координаты, фактической
скорости) по информации от устройства спутниковой навигации, датчиков пути и скорости
ДПС-САУТ-МП и электронной карты участка;
прием и запись во внутреннюю энергонезависимую память данных электронной карты пути
и графика движения поездов;
исключение проезда светофора с запрещающим показанием без предварительной остановки и
получения по радиоканалу разрешения на проезд от ДСП на участках, оборудованных
стационарными устройствами радиоканала;
6.
БЛОК ЭЛЕКТРОНИКИ ЛОКОМОТИВНЫЙ БЭЛ-Уприём сигналов от приемных катушек КПУ-2,
приемопередатчика РК, СНС, датчиков пути и
скорости, датчиков давления, цепей локомотива,
рукояток РБ, РБС, РБП;
обработка принимаемой информации;
выдача информации на БИЛ-У для индикации и
регистрации, в систему УСАВП, управления
клапаном ЭПК.
Блок электроники БЭЛ-У имеет модульную структуру
модуль МЦО – модуль центрального обработчика – предназначен для
обработки всей принимаемой информации, задания ограничений скорости,
выдачи управляющих воздействий, взаимодействия с САУТ-ЦМ/485, ТСКБМ и
другими бортовыми системами ЖАТ;
модуль ИПД – измеритель параметров движения – предназначен для приема
и обработки сигналов от ДПС, СНС, расчета скорости движения,
координаты и пройденного пути;
модуль РК – контроллер цифровой радиосвязи – обеспечивает передачу
информации по радиоканалу;
БВУ – блок входных устройств – предназначен для приема сигналов АЛСН и
АЛС-ЕН;
ММ – модуль маршрута – предназначен для приема данных CНC и
формирования ограничений скорости в соответствии с электронной картой
участка.
7.
БЛОК ИНДИКАЦИИ И ВВОДА ПАРАМЕТРОВ,УНИФИЦИРОВАННЫЙ БИЛ-У
подготовка информации системы, необходимой
машинисту, для индикации;
отображение информации;
взаимодействие с машинистом посредством рукояток
РБ, РБС, РБП и кнопок в составе БИЛ-У;
ввод и отображение локомотивных и поездных
характеристик;
регистрация оперативной информации о движении
поезда, диагностики системы, локомотивных и
поездных характеристик на съемной кассете
регистрации.
РЕЖИМЫ ФУНКЦИОНИРОВАНИЯ
индикации (основной);
ввода/контроля локомотивных характеристик;
ввода/контроля поездных характеристик;
диагностика блоков КЛУБ-У.
8.
БЛОК КОММУТАЦИИ И ФОРМИРОВАНИЯ ИНФОРМАЦИИДЛЯ РЕГИСТРАЦИИ БКР-У
Блок коммутации и формирования информации для
регистрации предназначен для:
Приема и предварительной обработки информации о:
Давлении в тормозных цилиндрах
Давлении в тормозной магистрали
Давлении в уравнительных резервуарах
Параметрах электрических цепей локомотива
Подключения к блоку БЭЛ-У периферийных устройств, а также для
их переключения при изменении кабины управления локомотива
Формирования сигналов управления принудительной
остановки локомотива
Выдачи сигналов управления на блок контроля
несанкционированного отключения ЭПК ключом (КОН)
9.
РУКОЯТКА БДИТЕЛЬНОСТИРБ, РБС
Рукоятка бдительности с
нормированным усилием нажатия для
контроля бодрствования машиниста
10.
ДАТЧИК ДАВЛЕНИЯ КРТ - 5Датчик давления предназначен для
измерения избыточного давления
неагрессивных сред в системах сбора
данных, контроля и регулирования
параметров
в диапазоне от 0 до 1,0 Мпа и
от 0 до 1,6 Мпа.
11.
ДАТЧИК УГЛА ПОВОРОТА Л178/1Датчик угла поворота предназначен для
измерения скорости движения поезда
Содержит 2 канала формирования
импульсов, сдвинутые между собой
на угол 90°
12.
АНТЕННА ПРИЕМНИКА СИСТЕМЫ СПУТНИКОВОЙНАВИГАЦИИ
Для приема сигналов спутниковых
систем GPS и ГЛОННАС, по которым
приемник определяет значения
географической широты и долготы,
текущего времени по Гринвичу и
скорость движения поезда,
предназначена антенна приемника
системы спутниковой навигации
13.
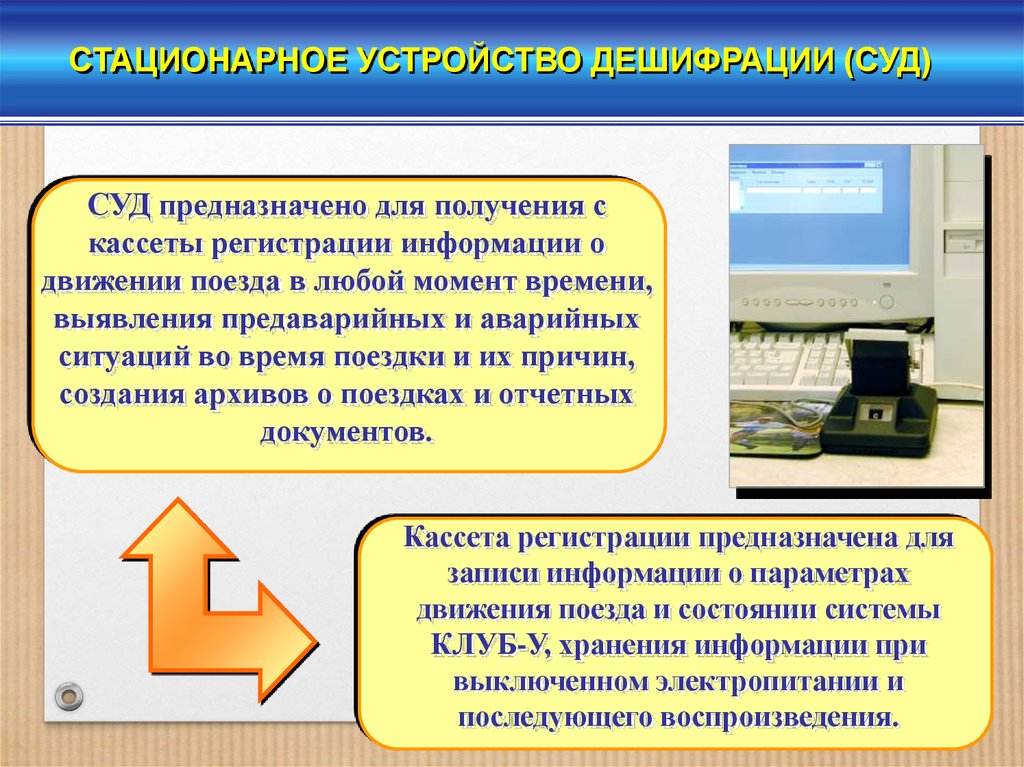
СТАЦИОНАРНОЕ УСТРОЙСТВО ДЕШИФРАЦИИ (СУД)СУД предназначено для получения с
кассеты регистрации информации о
движении поезда в любой момент времени,
выявления предаварийных и аварийных
ситуаций во время поездки и их причин,
создания архивов о поездках и отчетных
документов.
Кассета регистрации предназначена для
записи информации о параметрах
движения поезда и состоянии системы
КЛУБ-У, хранения информации при
выключенном электропитании и
последующего воспроизведения.
14.
15.
УСТРОЙСТВО ФОРМИРОВАНИЯ КАРТЫУФК
Устройство формирования карты предназначено
для эксплуатации как в условиях стационарного
поста за рабочим местом оператора, так и в кабине
всех типов локомотивов, оборудованных
системой КЛУБ-У
Устройство УФК обеспечивает:
Создание базы данных по
железнодорожным объектам для
последующей работы
устройства СУД-У
Подготовку макета электронной карты с привязкой
географических т линейных координат для характерных
объектов
Занесение информации электронной карты во
внутреннюю энергонезависимую память системы КЛУБУ
16.
АНТЕННА ЦИФРОВОГО РАДИОКАНАЛААнтенна цифрового радиоканала
предназначена для приема и
передачи радиосигналов для
взаимодействия систем КЛУБ-У,
МАЛС и интервального
регулирования движения поездов в
диапазоне 160 МГц.
17.
ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАНЭПК
Электропневматический клапан
обеспечивает автостопное
(экстренное) торможение по
командам системы КЛУБ-У
18.
БЛОК ВВОДА ДАННЫХ ПРЕДРЕЙСОВОГО КОНТРОЛЯБВД-У
Блок ввода данных осуществляет :
Загрузку информации в электронную карту системы
КЛУБ-У
Мониторинг внутрисистемных потоков сообщений по
локальной сети при настройке КЛУБ-У
19.
КОЛИЧЕСТВО КОМПЛЕКТОВ АППАРАТУРЫ (шт.)КЛУБ, КЛУБ-У, КЛУБ-П, КЛУБ-УП, ТСКБМ,
ПОСТАВЛЕННЫХ НА СЕТЬ ЖЕЛЕЗНЫХ ДОРОГ
ЗА ПЕРИОД 1994 – 2004 гг.
( без учета КРП и поставок в другие организации)
КЛУБ
КЛУБ-У
КЛУБ-П
КЛУБ-УП
ТСКБМ
1011
1651
4865
2386
1869
20.
СИСТЕМА АВТОБЛОКИРОВКИС ЦЕНТРАЛИЗОВАННЫМ
РАЗМЕЩЕНИЕМ АППАРАТУРЫ,
ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ
ЦЕПЯМИ И ДУБЛИРУЮЩИМИ
КАНАЛАМИ ПЕРЕДАЧИ
ИНФОРМАЦИИ
АБТЦ-М
21.
Система автоблокировки с централизованным размещениемаппаратуры, тональными рельсовыми цепями и дублирующими
каналами передачи информации
АБТЦ-М
Система АБТЦ-М предназначена для интервального
регулирования движения поездов на перегонах с
обращением грузовых, пассажирских
и высокоскоростных поездов
22.
Система автоблокировки с централизованным размещением аппаратуры,тональными рельсовыми цепями и дублирующими каналами передачи
информации АБТЦ-М
Стационарный
измерительный
комплекс
АРМ ДСП
Устройство
радиоканала
АБТЦ-М
CAN1
Оборудование
внутреннего
мониторинга
Блок БУ
CAN2
к ЭЦ
БИЭЦ
БКРЦ
БУСС
УС
БУСП
БПСС
БПСП
Напольное
оборудование
Рельсовая линия
Светофор
Переезд
БИСС
К соседней
станции
23.
СТРУКТУРА СИСТЕМЫ АБТЦ-МПервый (верхний) уровень: предназначен для взаимодействия
системы с другими системами управления и организации движения,
отображения информации о состоянии перегона и режимов работы
системы, а также для получения управляющих команд от оператора
(ДСП).
Второй (средний) уровень: системы предназначены для
выполнения логических зависимостей на основании информации о
состоянии устройств перегона и других систем, полученной от нижнего
уровня, и управляющих команд, получаемых от верхнего уровня системы;
формирования управляющих команд для устройств нижнего уровня и
информационных данных для аппаратуры верхнего уровня.
Третий (нижний) уровень: предназначен для сбора, обработки
информации от путевых датчиков и других систем, ее передачи на
второй (средний) уровень и исполнения или трансляции управляющих
команд, получаемых от аппаратуры второго уровня.
24.
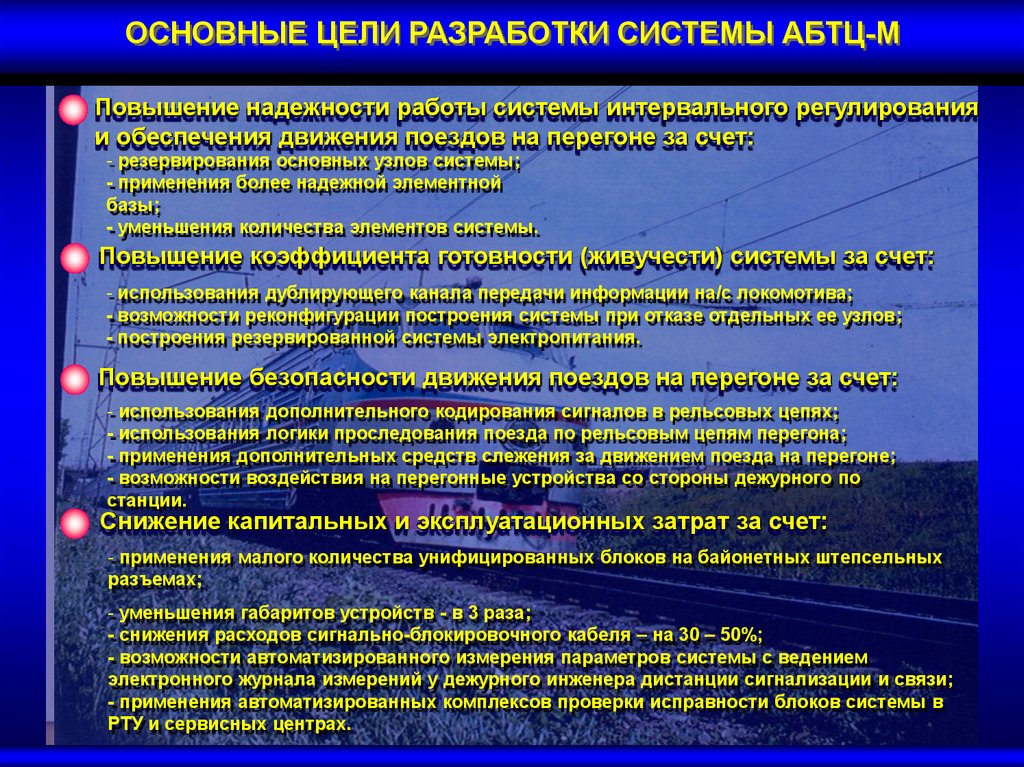
ОСНОВНЫЕ ЦЕЛИ РАЗРАБОТКИ СИСТЕМЫ АБТЦ-МПовышение надежности работы системы интервального регулирования
и обеспечения движения поездов на перегоне за счет:
- резервирования основных узлов системы;
- применения более надежной элементной
базы;
- уменьшения количества элементов системы.
Повышение коэффициента готовности (живучести) системы за счет:
- использования дублирующего канала передачи информации на/с локомотива;
- возможности реконфигурации построения системы при отказе отдельных ее узлов;
- построения резервированной системы электропитания.
Повышение безопасности движения поездов на перегоне за счет:
- использования дополнительного кодирования сигналов в рельсовых цепях;
- использования логики проследования поезда по рельсовым цепям перегона;
- применения дополнительных средств слежения за движением поезда на перегоне;
- возможности воздействия на перегонные устройства со стороны дежурного по
станции.
Снижение капитальных и эксплуатационных затрат за счет:
- применения малого количества унифицированных блоков на байонетных штепсельных
разъемах;
- уменьшения габаритов устройств - в 3 раза;
- снижения расходов сигнально-блокировочного кабеля – на 30 – 50%;
- возможности автоматизированного измерения параметров системы с ведением
электронного журнала измерений у дежурного инженера дистанции сигнализации и связи;
- применения автоматизированных комплексов проверки исправности блоков системы в
РТУ и сервисных центрах.
25.
ОСНОВНЫЕ ФУНКЦИИ СИСТЕМЫСистема обеспечивает:
Возможность контроля и управления удаленными объектами без/с установкой
дополнительных промежуточных пунктов размещения аппаратуры на
перегонах протяженностью до/свыше 24 км;
Реализацию логических зависимостей автоблокировки: контроль
проследования поезда, блокирование запрещающего сигнала путевого
светофора;
Формирование и передачу в рельсовую линию навстречу поезду кодов
автоматической локомотивной сигнализации АЛСН и/или АЛС-ЕН в соответствии с
показаниями путевых светофоров и поездной ситуацией, а также передачу
информации на локомотив посредством цифрового радиоканала;
Прием аппаратурой радиоканала информации с локомотива о местоположении
поезда с возможностью определения точных координат головы поезда;
Управление устройствами автоматической переездной сигнализации и
контроль их состояния;
Организацию по радиоканалу двухсторонней передачи информации между
системой и локомотивными устройствами;
Взаимодействие с аппаратурой ЭЦ, ДЦ и другими системами автоматики;
26.
ПОСТРОЕНИЕ ПЕРЕГОННЫХ РЕЛЬСОВЫХ ЦЕПЕЙСИСТЕМЫ АБТЦ-М
1
Станция
1П
ПК
ПК
РК
ПЯ
ПЯ
Напольные
устройства
5П
3П
РК
ПЯ
ПЯ
Пост ЭЦ
УМ
УМ
=24 В
БКРЦ
БУ
ИПУМ
БУ
БКРЦ
БУ
БУ
~ 220 В =24 В
=24 В
К следующему
блоку БКРЦ
27.
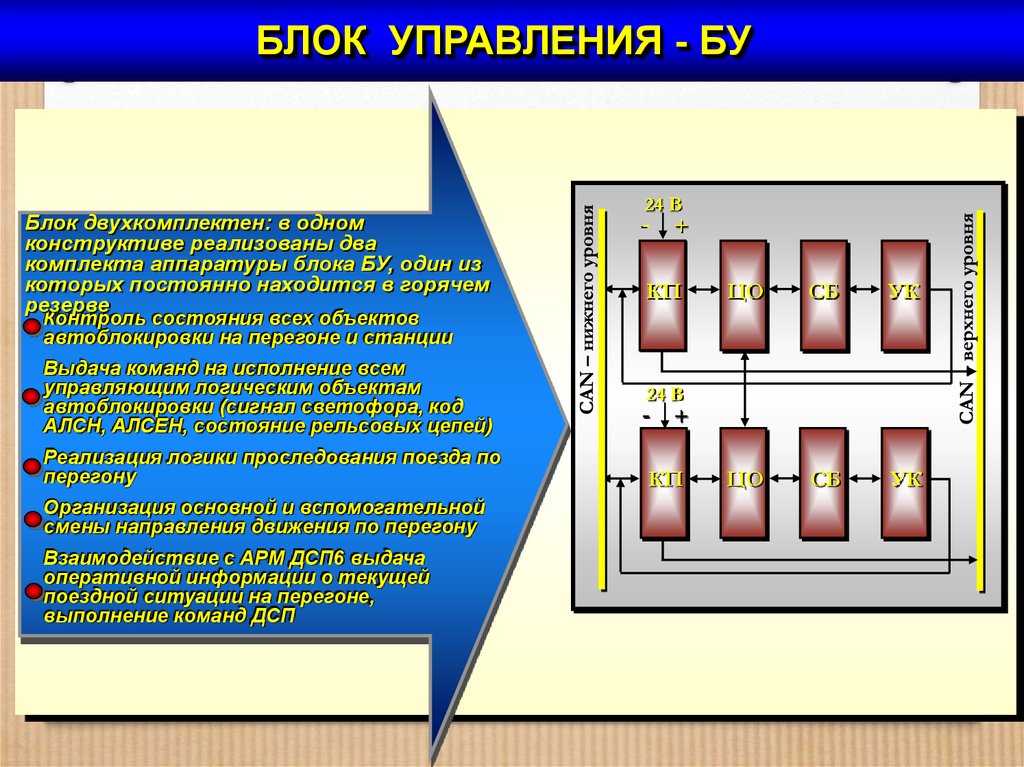
БЛОК УПРАВЛЕНИЯ - БУБлок двухкомплектен: в одном
конструктиве реализованы два
комплекта аппаратуры блока БУ, один из
которых постоянно находится в горячем
резерве
24 В
-
+
КП
ЦО
СБ
УК
ЦО
СБ
УК
Контроль состояния всех объектов
автоблокировки на перегоне и станции
Выдача команд на исполнение всем
управляющим логическим объектам
автоблокировки (сигнал светофора, код
АЛСН, АЛСЕН, состояние рельсовых цепей)
-
Реализация логики проследования поезда по
перегону
КП
Организация основной и вспомогательной
смены направления движения по перегону
Взаимодействие с АРМ ДСП6 выдача
оперативной информации о текущей
поездной ситуации на перегоне,
выполнение команд ДСП
24 В
+
28.
БЛОК КОНТРОЛЯ РЕЛЬСОВЫХ ЦЕПЕЙ (БКРЦ)Блок предназначен для контроля
свободности/занятости/исправности
рельсовой цепи по анализу сигнала в
приемопередающем тракте, в котором
в качестве физического канала
используется ограниченный участок
рельсовой линии
СОСТАВ И ФУНКЦИИ БЛОКА:
Содержит два независимых двухканальных приемника, контролирующих соседние
рельсовые цепи (МП), двухканальный формирователь комплексного сигнала (ФКС),
соответствующие им ячейки безопасного сравнения (СБ), аналоговый преселектор
(НС) и вторичные источники питания;
Формирование сигнала контроля рельсовой цепи, который через усилитель
мощности (УМ) и согласующее устройство подается в рельсовую цепь;
При обрыве цепи (повреждении рельса) или появлении шунта (подвижной единицы)
приемник формирует сигнал занятости/неисправности рельсовой цепи.
29.
БЛОК УПРАВЛЕНИЯ СВЕТОФОРОМ СТАНЦИОННЫЙ БУССк БУ
Обеспечивает управление огнями
проходных светофоров по физическим
цепям сигнально-блокировочного кабеля с
парной скруткой жил и использованием
одной пары на светофор.
ФУНКЦИИ БЛОКА:
к БУ
Канал А
Канал В
СБ
к БУСП-1
к БУСП-2
Управление двумя светофорами для разных направлений движения;
Передача питающего напряжения постоянного тока на каждый светофор;
Передача на каждый светофор управляющих команд выбора огней светофора;
Контроль правильности выбора огней светофора и исправности БУСП;
Отключение питающего напряжения светофора при выявлении неисправности и
несоответствии выбранного огня светофора переданного команде;
Автоматическое включение резервной нити лампы светофора при перегорании
основной.
30.
БЛОК УПРАВЛЕНИЯ ПЕРЕГОННЫМИ СВЕТОФОРАМИБУСП
к БУСС
Блок предназначен для управления огнями
линзовых светофоров со светофорными
лампами с 3-х или 4-х значной сигнализацией и
устанавливается для эксплуатации в трансформаторный ящик проходного светофора
А
В
Ключи
управления
канала А
Ключи
управления
канала В
Контроль
ФУНКЦИИ БЛОКА:
Светофор
Вместе с блоком БУСС образуют устройство управления огнями проходных светофоров
для систем с централизованным размещением;
Обеспечивает включение ламп светофора в режиме непрерывного горения, в мигающем
режиме и в режиме ДСН в соответствии с полученными командами от блока БУСС;
Обеспечивает включение ламп светофора через режим ДСН для увеличения срока службы
ламп;
Обеспечивает контроль состояния нитей ламп светофора, режима двойного снижения
напряжения.
Обеспечивает управление основной и резервной нитями ламп светофора.
31.
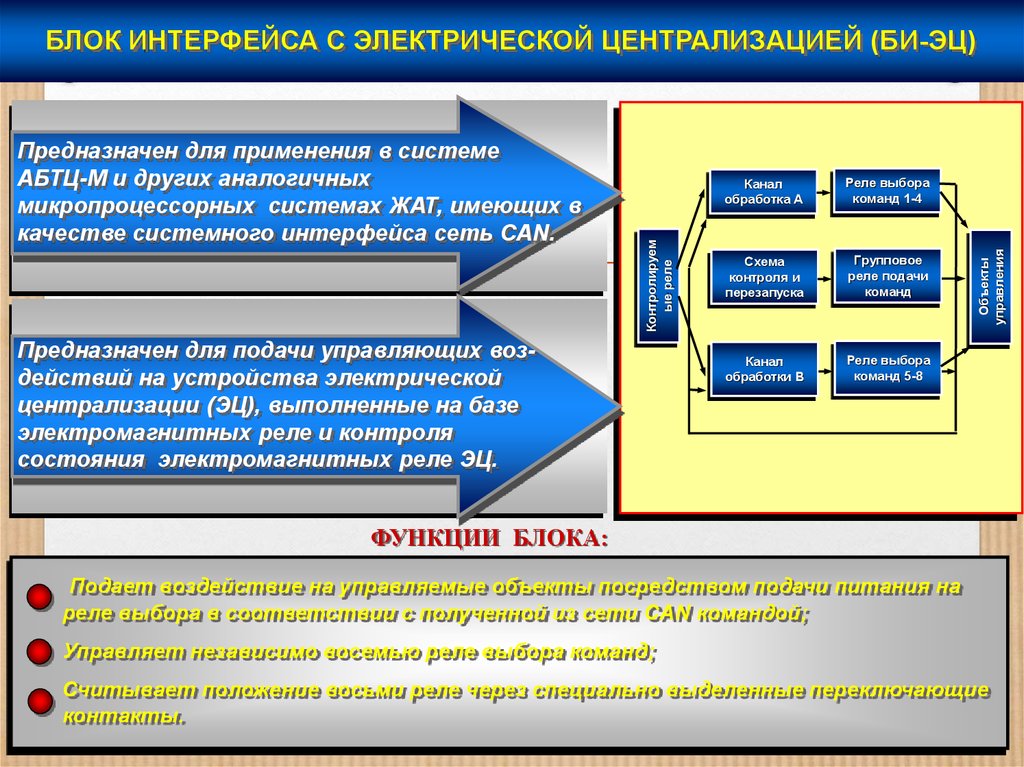
Предназначен для подачи управляющих воздействий на устройства электрическойцентрализации (ЭЦ), выполненные на базе
электромагнитных реле и контроля
состояния электромагнитных реле ЭЦ.
Канал
обработка А
Реле выбора
команд 1-4
Схема
контроля и
перезапуска
Групповое
реле подачи
команд
Канал
обработки В
Реле выбора
команд 5-8
Объекты
управления
Предназначен для применения в системе
АБТЦ-М и других аналогичных
микропроцессорных системах ЖАТ, имеющих в
качестве системного интерфейса сеть CAN.
Контролируем
ые реле
БЛОК ИНТЕРФЕЙСА С ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИЕЙ (БИ-ЭЦ)
ФУНКЦИИ БЛОКА:
Подает воздействие на управляемые объекты посредством подачи питания на
реле выбора в соответствии с полученной из сети CAN командой;
Управляет независимо восемью реле выбора команд;
Считывает положение восьми реле через специально выделенные переключающие
контакты.
32.
БЛОК БИССБИСС
Блок предназначен для организации
межстанционного канала связи двух
полукомплектов системы АБТЦ-М
Порт
локальный
ПИ
M300
V.21 CCITT
CANv.2.0A
Порт
глобальный
С2- ИС
Основными функциями блока являются:
Функции глобального моста межсетевого взаимодействия технологических
процессов полукомплектов системы АБТЦ-М с фиксированной маршрутизацией,
с CAN 0 интерфейсом для подключения к локальной сети и со встроенным
модемом.ю подключенному к последовательному глобальному порту моста.
33.
АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТОДЕЖУРНОГО ПО СТАНЦИИ (АРМ-ДСП-АБ)
АРМ –ДСП предназначено для
отображения состояния перегона,
блоков системы АБТЦ-М и
информирования дежурного по
станции о важных событиях,
произошедших в системе.
ФУНКЦИИ АРМ:
Индикация состояния рельсовых цепей;
Индикация сигналов напольных светофоров;
Индикация состояний переезда;
Вывод на экран в тестовом виде сообщений о произошедших в системе важных
событий;
Диагностика блоков системы АБТЦ-М;
Блокировка светофоров с их последующей разблокировкой;
Цифровая радиосвязь для передачи состояния перегонных объектов;
Ведение, просмотр и архивация протоколов:
принятых от системы АБТЦ-М данных;
сбоев в работе системы АБТЦ-М;
34.
АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТОЭЛЕКТРОМЕХАНИКА (АРМ-ШН)
Программа «Диагностика АБТЦ-М»
отображает состояние блоков АБТЦ-М и
позволяет выполнять их настройку.
Программа «Диагностика АБТЦ-М»
создает файлы протоколов
диагностики блоков АБТЦ-М. С ее
помощью производится настройка
блоков БКРЦ перед их включением в
систему.
35.
ПУЛЬТ КОНТРОЛЯ АВТОБЛОКИРОВКИПК-АБ
БИК2
Ячейка
интерфейсов
Ячейка
выходов
Ячейка
входов
БК
Микроконтроллер
Ячейка
УК-БУСС
Ячейка
расширения
Ячейка
нагрузок
ПК-АБ предназначено для
проверки работоспособности и
контроля на соответствие
техническим условиям блоков
системы АБТЦ-М на этапах входного
контроля и технического
обслуживания.
Клавиатура
ФУНКЦИИ АРМ:
БИК2
БК
Выдает сигналы тестирования проверяемых блоков, контроля
ответных сигналов проверяемых блоков, обслуживания
клавиатуры и дисплея.
Выполняет роль сопряжения сигналов, выдаваемых БИК2, с
аппаратурой системы АБТЦ-М.