







")
")





")






 Физика
Физика Механика
МеханикаПохожие презентации:

")
")




 = поступательное + вращательное")
")
")
Плоское движение твёрдого тела. (Лекция 3, Кафедра теоретической механики)
1.
Новосибирский Государственный Архитектурно-СтроительныйУниверситет (Сибстрин)
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ.
КИНЕМАТИКА
ЛЕКЦИЯ 3.
ПЛОСКОЕ ДВИЖЕНИЕ ТВЁРДОГО
ТЕЛА
Кафедра теоретической механики
2. План лекции
Введение.Закон плоского движения.
Скорости точек тела.
Ускорения точек тела.
Кинематический расчет плоского механизма.
Заключение.
3. На прошлых лекциях
Мы уже изучили:-Кинематику точки
-Поступательное движение твердого тела
-Вращательное движение твердого тела
Тема сегодняшней лекции:
Плоское движение твердого
тела
Q
O
Определение. Плоским
называется такое движение
P
твердого тела, при котором все x
его точки М(t) движутся в
плоскостях Q, параллельных
некоторой неподвижной
плоскости P.
M
A S
y
4. Цель лекции
Изучить плоское движениетвердого тела
5.
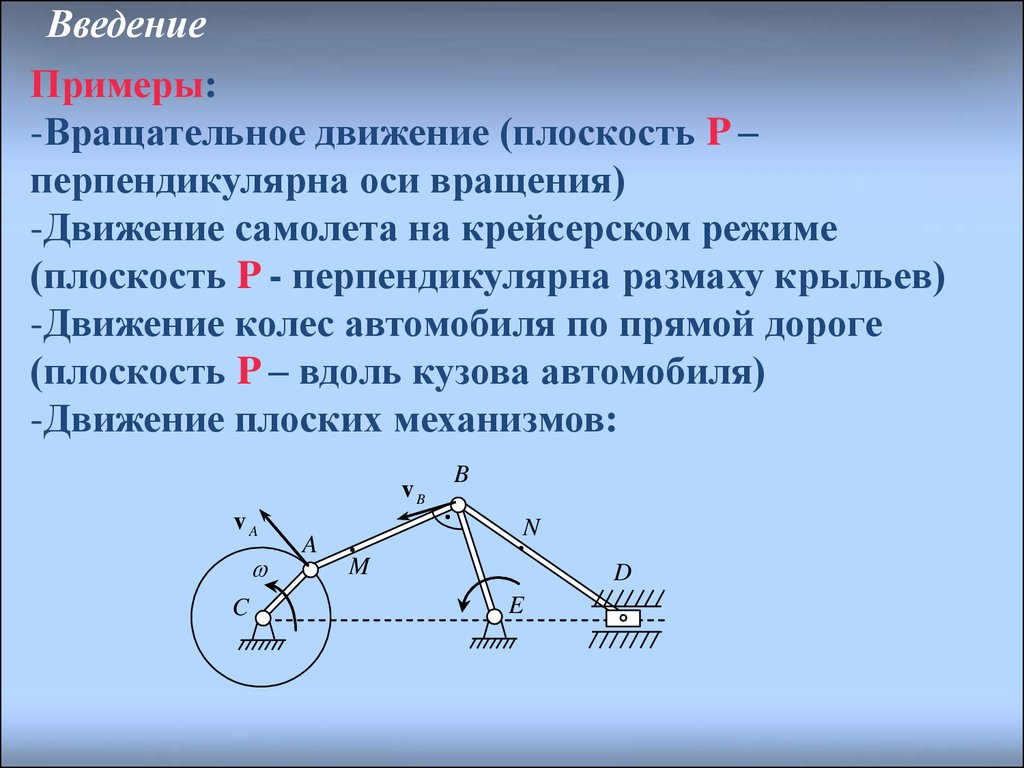
ВведениеПримеры:
-Вращательное движение (плоскость P –
перпендикулярна оси вращения)
-Движение самолета на крейсерском режиме
(плоскость P - перпендикулярна размаху крыльев)
-Движение колес автомобиля по прямой дороге
(плоскость P – вдоль кузова автомобиля)
-Движение плоских механизмов:
vB
vA
C
A
B
N
M
D
E
6.
ВведениеQ
O
P
M
A S
y
x
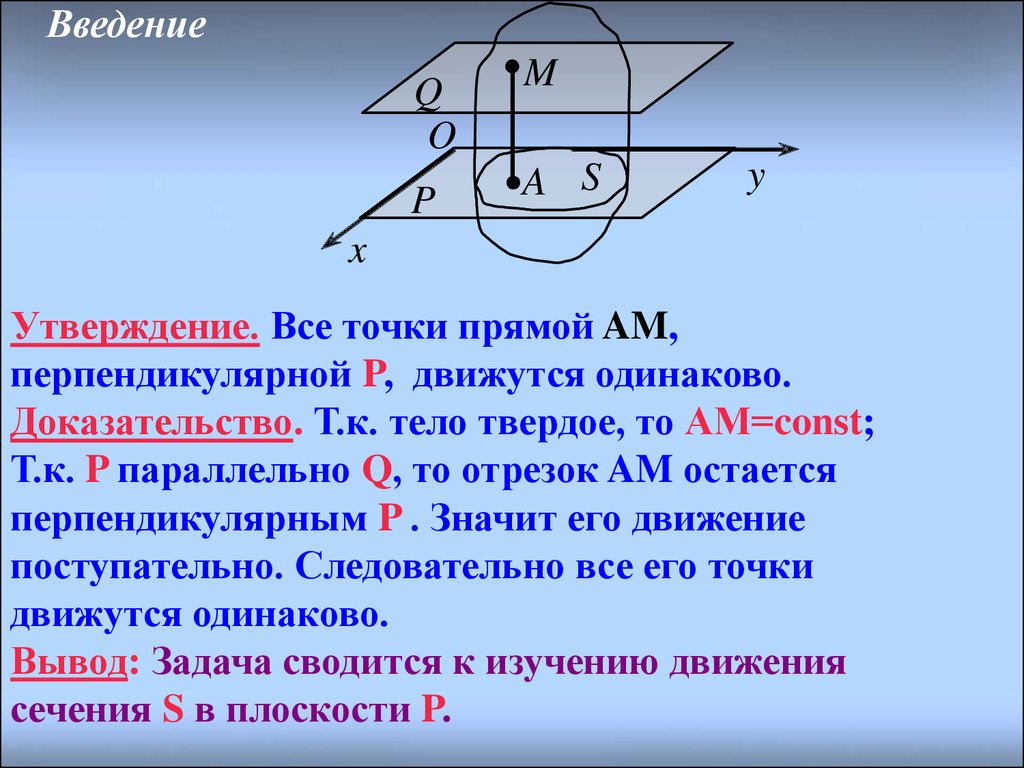
Утверждение. Все точки прямой AM,
перпендикулярной P, движутся одинаково.
Доказательство. Т.к. тело твердое, то АМ=const;
Т.к. P параллельно Q, то отрезок AM остается
перпендикулярным P . Значит его движение
поступательно. Следовательно все его точки
движутся одинаково.
Вывод: Задача сводится к изучению движения
сечения S в плоскости P.
7.
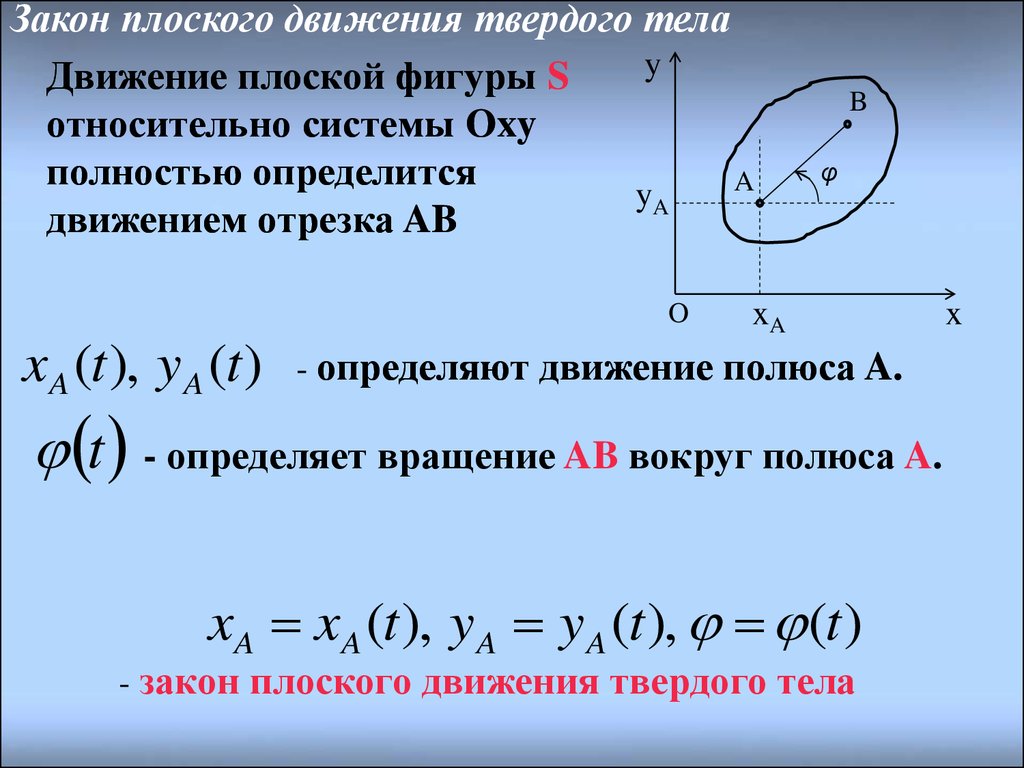
Закон плоского движения твердого телаy
Движение плоской фигуры S
относительно системы Oxy
полностью определится
A
yA
движением отрезка AB
O
xA (t ), y A (t )
B
φ
xA
- определяют движение полюса A.
t - определяет вращение AB вокруг полюса A.
xA xA (t ), y A y A (t ), (t )
- закон плоского движения твердого тела
x
8.
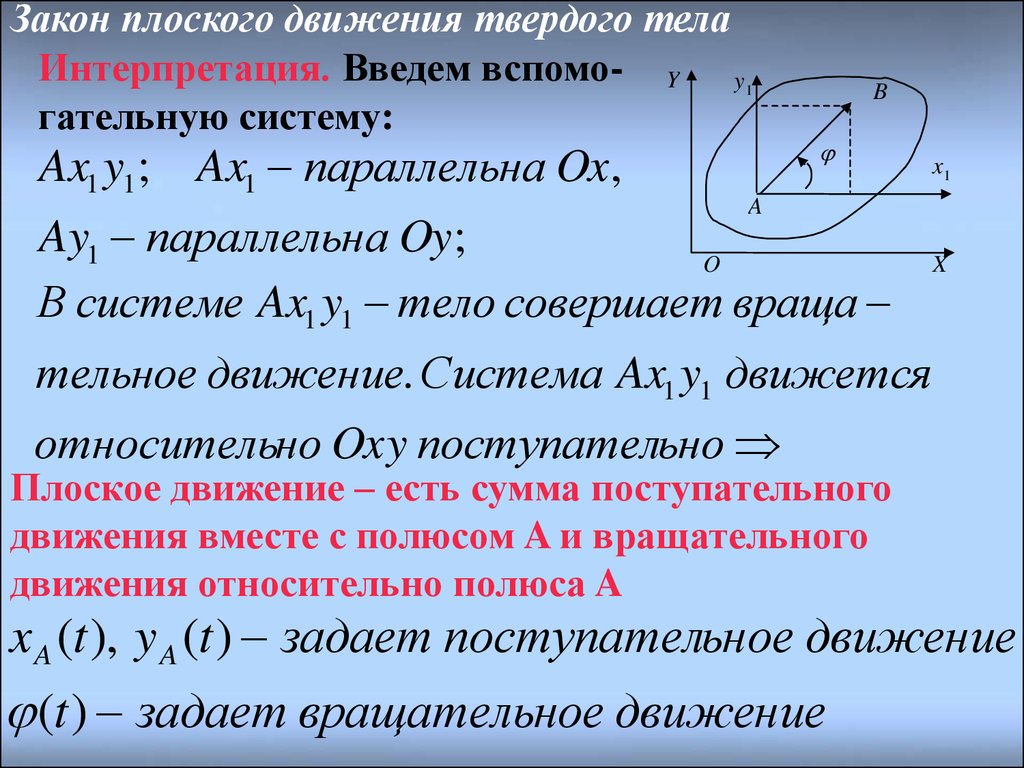
Закон плоского движения твердого телаИнтерпретация. Введем вспомо- Y y
гательную систему:
Ax1 y1; Ax1 параллельна Ox,
B
1
x1
A
Ay1 параллельна Oy;
O
В системе Ax1 y1 тело совершает враща
X
тельное движение. Система Ax1 y1 движется
относительно Oxy поступательно
Плоское движение – есть сумма поступательного
движения вместе с полюсом A и вращательного
движения относительно полюса A
x A (t ), y A (t ) задает поступательное движение
(t ) задает вращательное движение
9. Интерпретация
1а)
A
B
2
B'
1'
1
б)
φ
A'
1'
2
B
A
B'
φ
A'
Перевод сечения из положения 1 в положение 2 можно
рассматривать как суперпозицию двух движений:
поступательного из 1 в 1' и вращательного из 1' в 2
вокруг точки A'.
В качестве полюса можно выбрать любую точку. На
рис. б) в качестве полюса выбрана точка В.
Внимание: Длина пути при поступательном перемещении изменилась, но угол поворота остался прежним!
Т.е. поступательная часть от выбора полюса зависит, а
вращательная часть – не зависит!
10. Закон движения и траектории точек тела
rM (t ) rA (t ) (t )xM (t ) x A (t ) (t ) cos( (t ))
y1
y
rM
yM (t ) y A (t ) (t ) sin( (t ))
Пример (движение эллипсографа)
AB l , AM b;
y
O
rA
B
x1
x
Определить закон движения
и траекторию точки M
M
B
xM (t ) (b l ) cos (t )
A
A
M
ρ
O
x
yM (t ) b sin (t ) закон движения
xM2
yM2
2 1 эллипс
2
(b l )
b
11. Скорости точек тела
y1rM (t ) rA (t ) (t )
y
rM
Дифференцируя, получим:
M
ρ
B
x1
A
v M v A v MA
x
r
O
v A скорость полюса
d
v MA
скорость вращения вокруг полюса
dt
( v MA скорость M в системе Ax1 y1 ).
A
vM
vMA AM
v MA
vA
A
M
vA
12. Следствия формулы для скоростей точек
Следствие 1. Проекции скоростей двух точек твердогоvB
тела на прямую, их соединяющую, равны.
Доказательство.
v B v A v BA
v B cos v A cos
Следствие 2. Если точки
A,B,C лежат на одной
прямой, то и концы
векторов v A , v B , v C
лежат на одной прямой,
причем ab/bc AB/BC
vA
A
vBA
β
α
α
B
vA
13. Мгновенный центр скоростей (МЦС)
МЦС – это точка, скорость которойA
равна нулю в данный момент времени.
C
Пример. Катящийся без проскальзыL
вания диск. МЦС-точка С.
Утверждение. Если угловая скорость не равна нулю
для данного t, то МЦС существует и единственен.
vA
Доказательство.
A
Т.к. 0 то A и B, v A v B .
C
Если v A и v B не параллельны : B A
v A v C v AC ; v B v C v BC
Если v C 0 то v A AC , v B BC
C найдено.
B
vB
14. Мгновенный центр скоростей (МЦС)
Если v A и vB параллельны :A
B
C
в)
б)
a)
vA
A
vA
vB
C
vB
vA
A
B
vB
B
Если 0 то случай в ) невозможен
(по теореме о проекциях )
Если 0 то для всех A, B : v A v B
и МЦС не существует
15.
Свойства МЦС.Пусть P- МЦС. Выбирая P за полюс, получим:
v A ω PA; v B ω PB;
v A PA; v B PB
vB
vA vB vC
Или :
...
AP BP CP
Причем v С PС
v B PB
A
P
vA
ω
B
Вывод. Если МЦС (точку P) взять за полюс, то
плоское движение для данного t представляет собой
чистое вращение вокруг точки P
16.
МЦУ(пример)Пример. Колесо катится без проскальзывания по
прямой дороге.
A
B
vA
C
vB
vC
D
ω
vD
P E
vA
A
B
vB
D
vD
17.
Пример (расчет скоростей плоского механизма)Дано: OA , r1 r2 r, BD CD l
Определить v A , v B , v D , BD ; CD
Решение.
A
O
OA : v A OA OA ;
AB : P1 - МЦС AB v B BP1 ;
vA
P1
vB
D
B
45º P
BD
vD
ω AB v A /AP1 v B /BP1 v B 2 2r OA
BD : PBD МЦСBD BD v B / BPBD v D / DPBD
BD 4r OA / l , v D 2 2r OA
CD : v D CD, CD v D / CD 2 2r OA / l
C
18. Ускорения точек тела.
Имеем равенство : v B v A ω ρПродифференцируем его :
d v B dv A dω d ρ
aB
ρ ω
dt
dt
dt
dt
z
aA ε ρ ω ω ρ
y
B
aBA n
aBA
vBA
A
O
z1
ω
aA
ɛ
x
n
aBA ; aBA vBA
n
aB a A aBA aBA
Ускорение точки B равно сумме ускорения полюса A и
ускорения вращения точки B вокруг полюса A
19. Следствие формулы для ускорений точек
ca
aA
A
b
aB
B
aC
C x
Рис. 13.19
Следствие . Если точки
на одной прямой,
A,B,C
лежат
то и концы векторов aA , aB , aC
лежат на одной прямой, причем ab/bc AB/BC
20. Мгновенный центр ускорений (МЦУ)
МЦУ- это точка Q , ускорение которой в данныймомент времени t равно нулю.
Утверждение. Для непоступательного движения МЦУ
В
существует и единственен.
a
B
A
aA
Доказательство.
aA aQ a AQ ; Q МЦУ
2
aA a AQ ; tg / ;
aC
C
Q
a A AQ 2 4 AQ a A / 2 4
Распределение ускорений как при вращении вокруг Q.
aA / AQ aB / BQ aC / CQ
2
Замечание. МЦС и МЦУ- разные точки!
4
21. Кинематический расчет плоского механизма
Пример. Дано: OA , OAОпределить:
v A , v B , AB ,
BC , aA , aB , AB , AB
Схема решения.
1. Расчет скоростей.
OA : v A OA; v A OA;
AB : v B BC PAB МЦС AB ; ωAB v A /APAB v B /BPAB
BC : ωBC v B /BC
22. Кинематический расчет плоского механизма
2. Расчет ускорений.OA : a An 2OA; a A OA;
n n
2
AB : aB a A aBA aBA ; aBA AB
AB; a BA AB AB;
n
2
BC : aB aB aB (*); aBn BC
BC ; a B BC BC
n n
n
aB aB a A a A aBA aBA (**)
В (**) две неизвестные : AB , BC . Проецируя (**) на
две оси, найдем их. Ускорение aB найдем из (*).
23. Еще один пример
OA 0 , OA l1; AB l2 ; BD l3 ; DE l4Определить v E
Дано:
24. Заключение
Заключение1. Выведен закон плоского движения.
2. Показано, что плоское движение представляется
суммой простейших движений – поступательного
вместе с полюсом и вращательного вокруг
полюса.
3. Выведены формула связи между скоростями
точек и ее следствия.
4. Определено понятие МЦС и показаны его
своцства.
5. Выведены формула связи между ускорениями
точек и ее следствия.
6. Рассмотрены примеры кинематического расчета
плоских механизмов.
25. Контрольные вопросы к лекции
1. Сколько степеней свободы имеет твёрдое тело,совершающее плоское движение?
2. Запишите закон плоского движения твёрдого тела.
3. Как связаны между собой скорости двух точек твёрдого
тела, совершающего плоское движение?
4. Чему равна угловая скорость вращения твёрдого тела?
5. Сформулируйте теорему о проекциях скоростей двух
точек твёрдого тела при плоском движении.
6. Что называется мгновенным центром скоростей?
7. Что нужно знать, чтобы определить МЦС?
8. Из каких составляющих складывается ускорение точки
твёрдого тела, совершающего плоское движение?
9. Чему равно ускорение вращательного движения точки
вместе с телом вокруг полюса?