









 Физика
ФизикаПохожие презентации:







Моделирование траектории самолёта
1.
Моделирование траекториисамолёта
лабораторная работа
2.
Системы координат3.
Углы ориентации4.
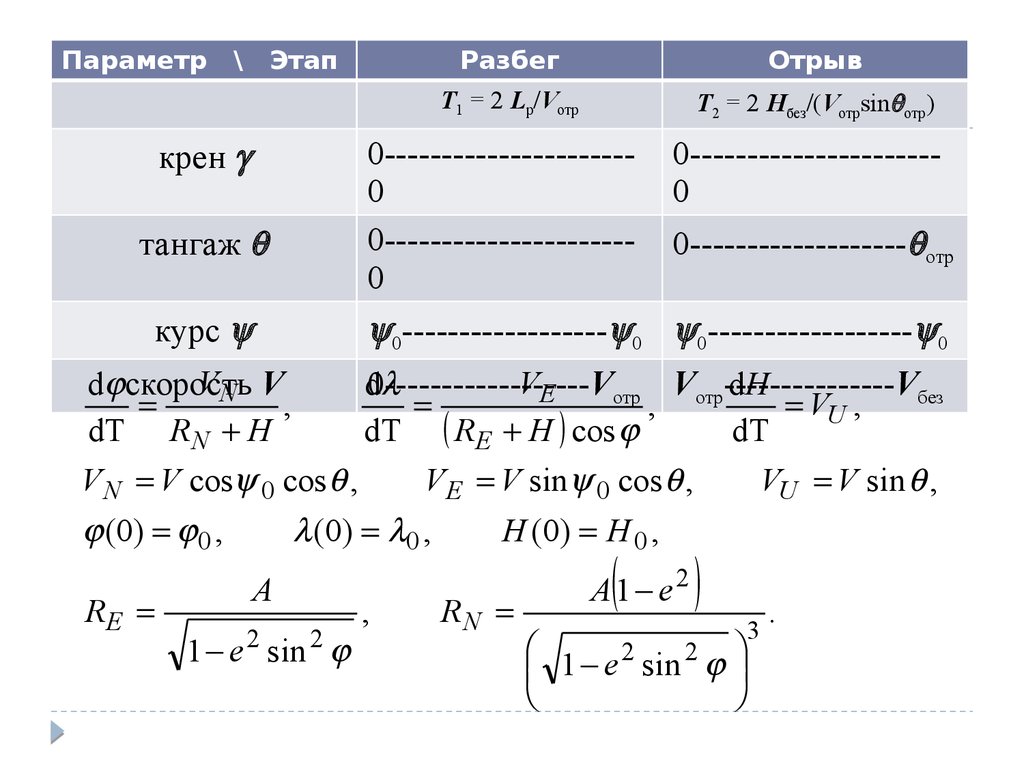
Параметр\
Этап
крен
Отрыв
T1 = 2 Lр/Vотр
T2 = 2 Hбез/(Vотрsin отр)
0---------------------0
0---------------------0
тангаж
курс
0---------------------0
0------------------- отр
0------------------ 0 0------------------ 0
VN V
d скорость
,
dT R N H
VE
d0------------------V
dH
V ---------------V
отр
без
, отр
VU ,
dT RE H cos
dT
V N V cos 0 cos ,
(0) 0 ,
RE
Разбег
VE V sin 0 cos ,
( 0) 0 ,
A
1 e 2 sin 2
,
H ( 0) H 0 ,
RN
A 1 e2
VU V sin ,
1 e 2 sin 2
3
.
5.
Расчёт летных характеристиксамолёта
f = 0.2
Xa = Ya /10
Cya отр = 1.5
= 1.2 кг/м3
6.
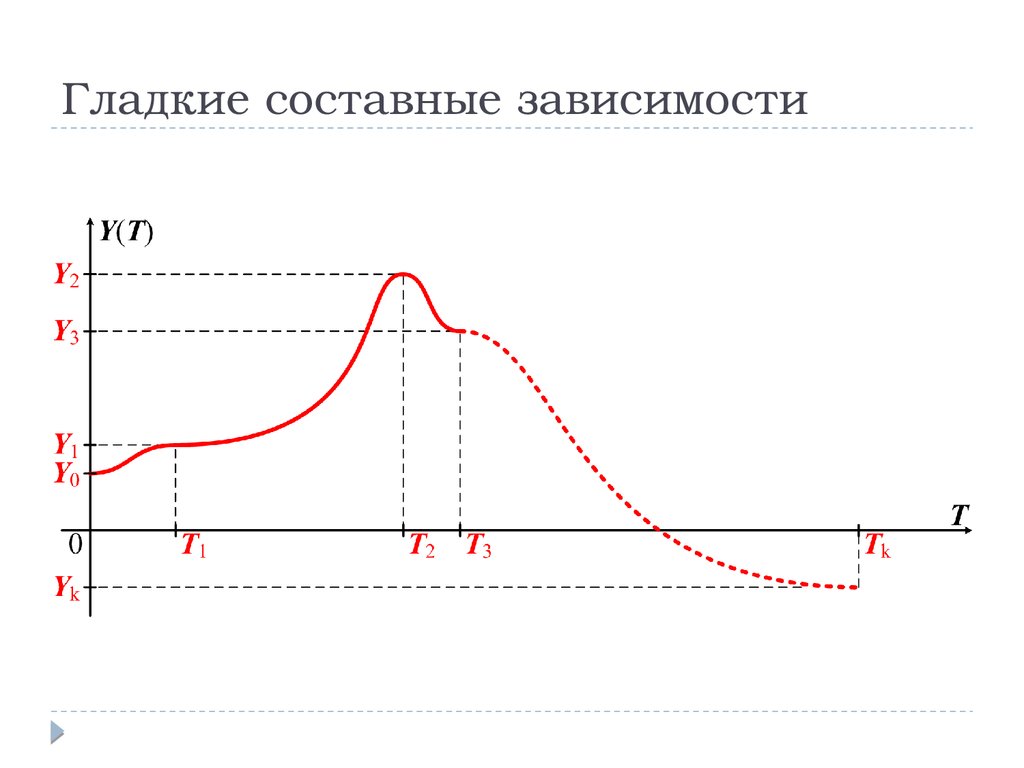
Гладкие составные зависимости7.
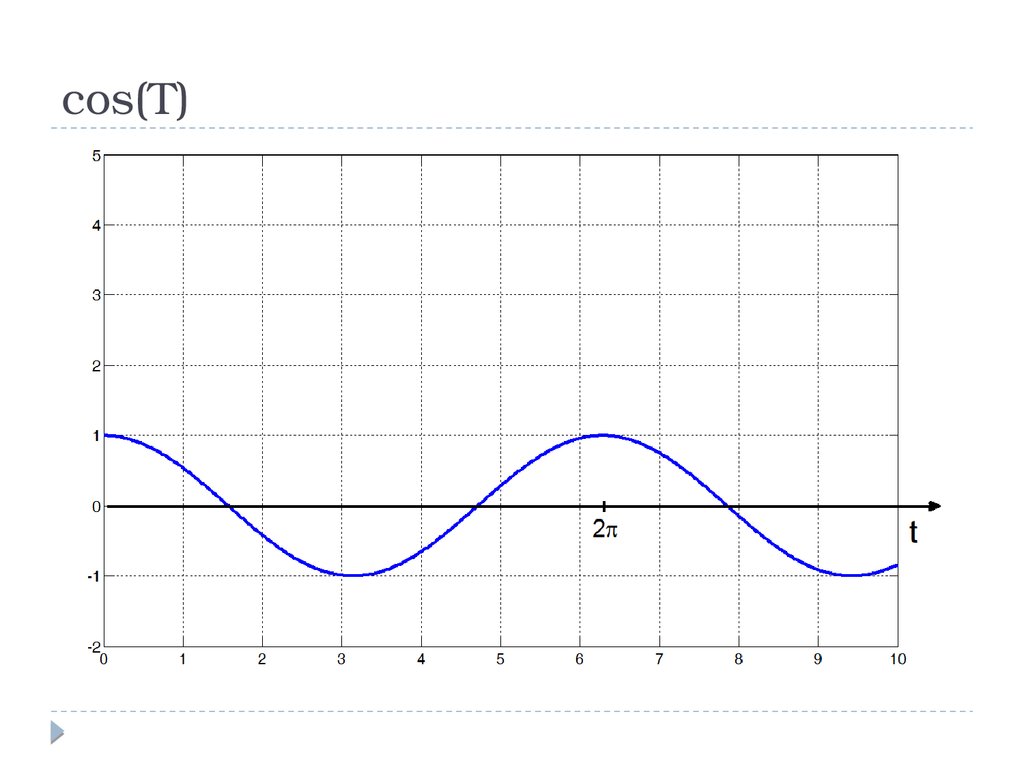
cos(T)8.
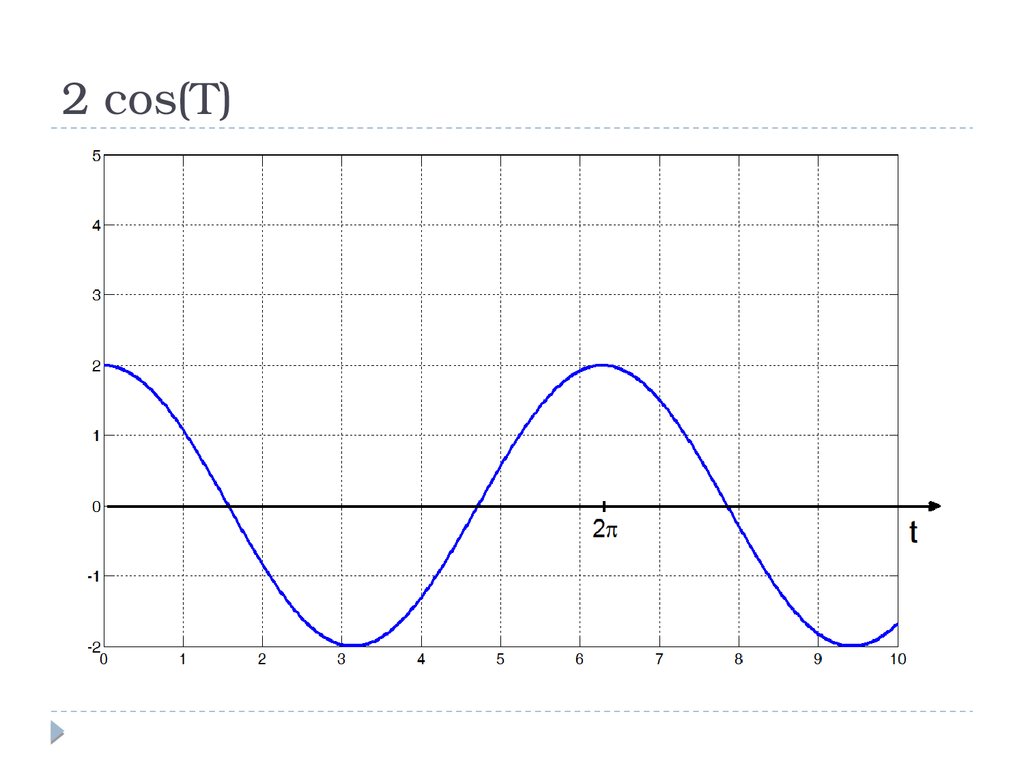
2 cos(T)9.
2 cos(T) + 110.
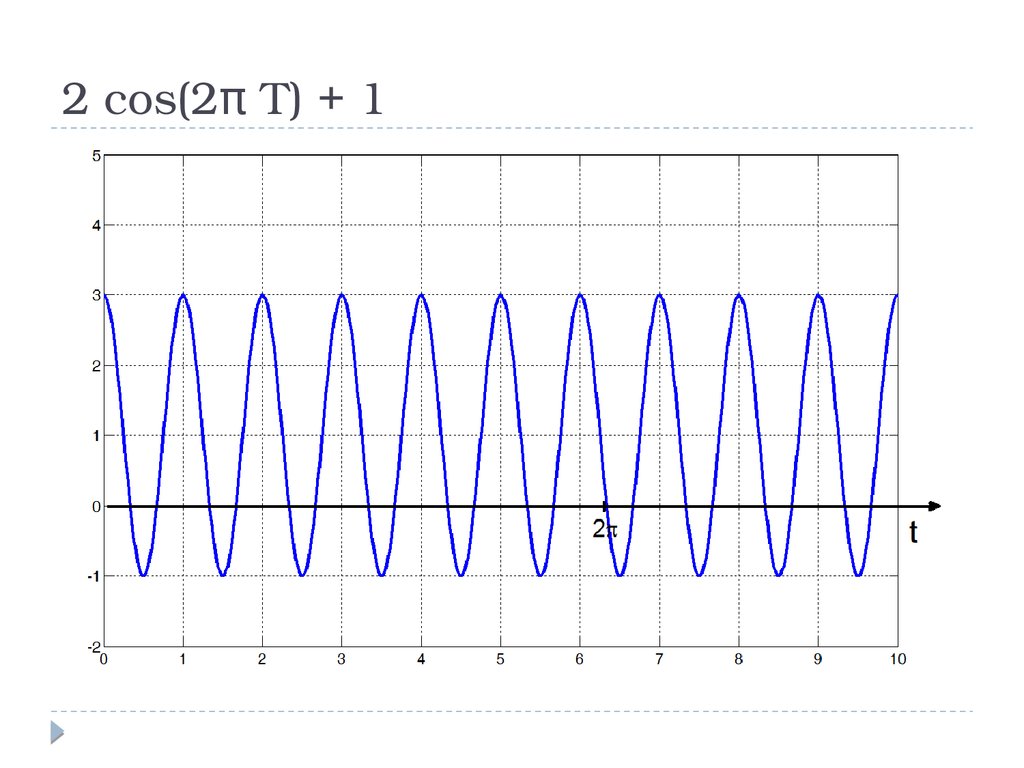
2 cos(2π T) + 111.
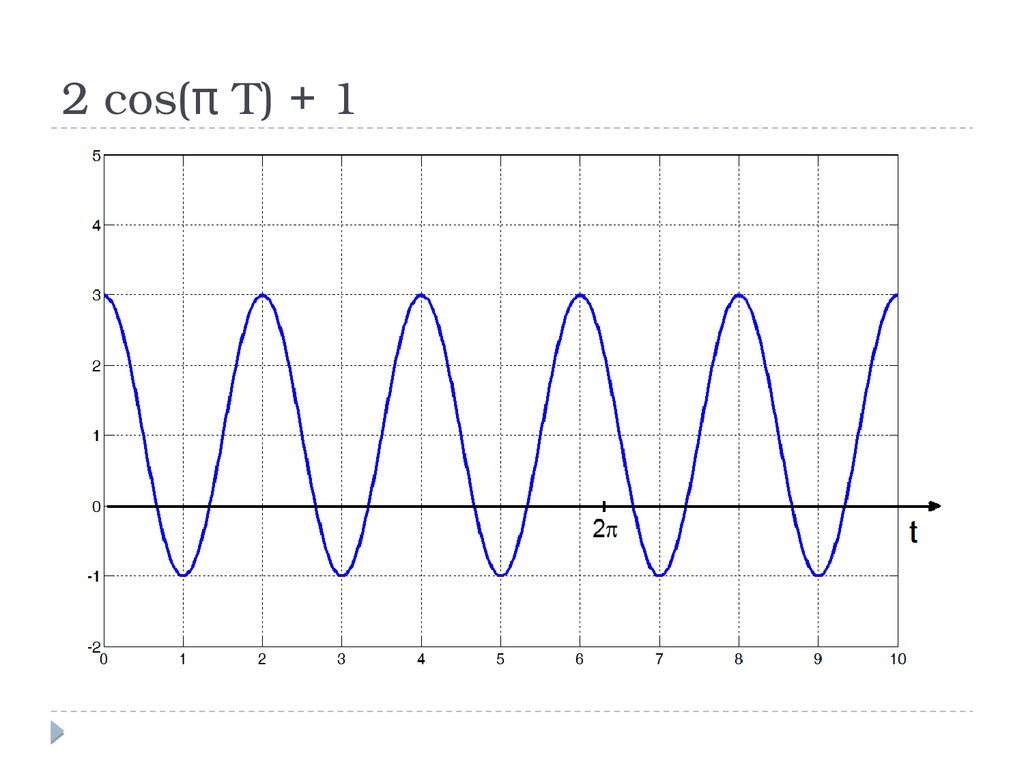
2 cos(π T) + 112.
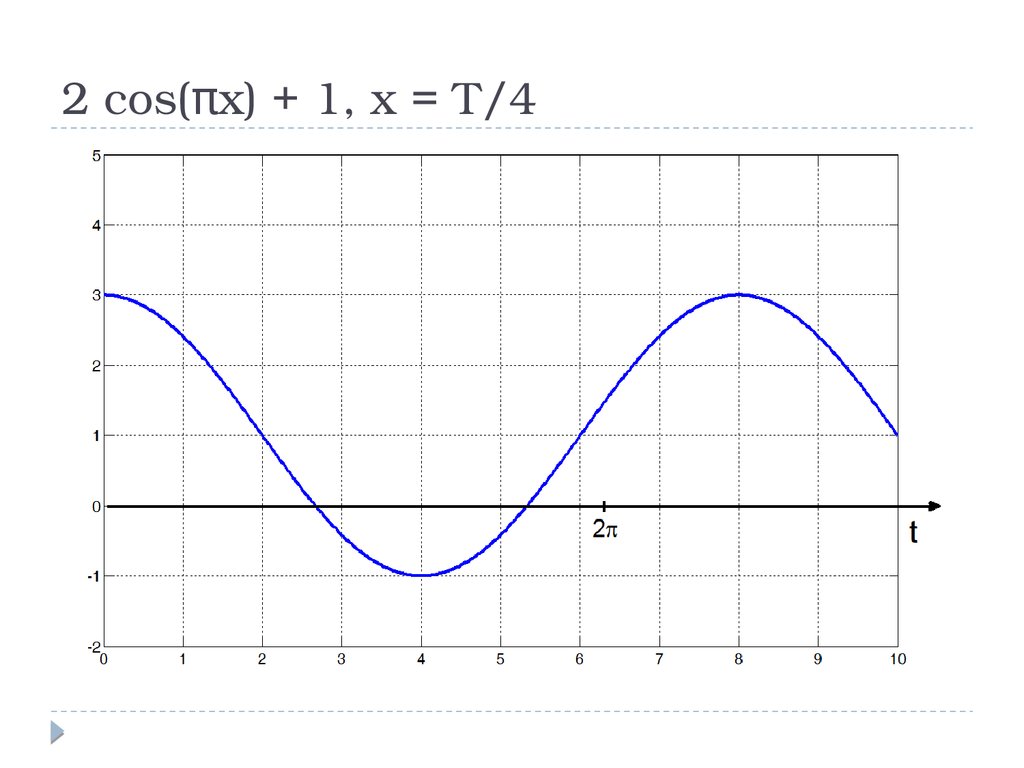
2 cos(πx) + 1, x = T/413.
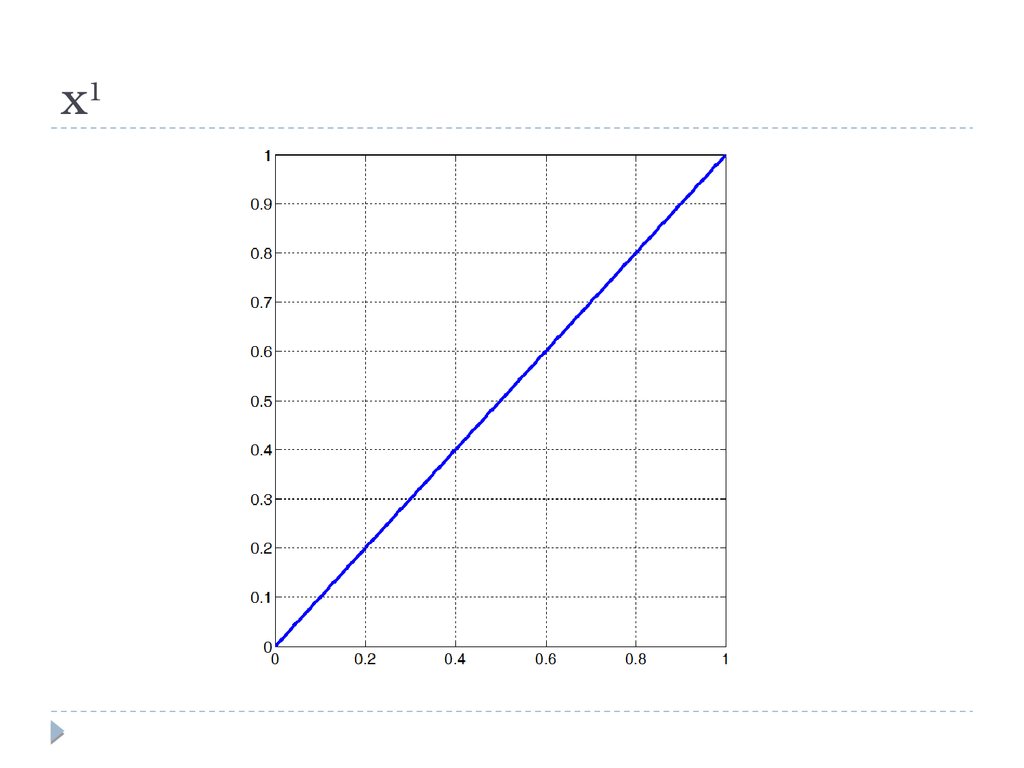
x114.
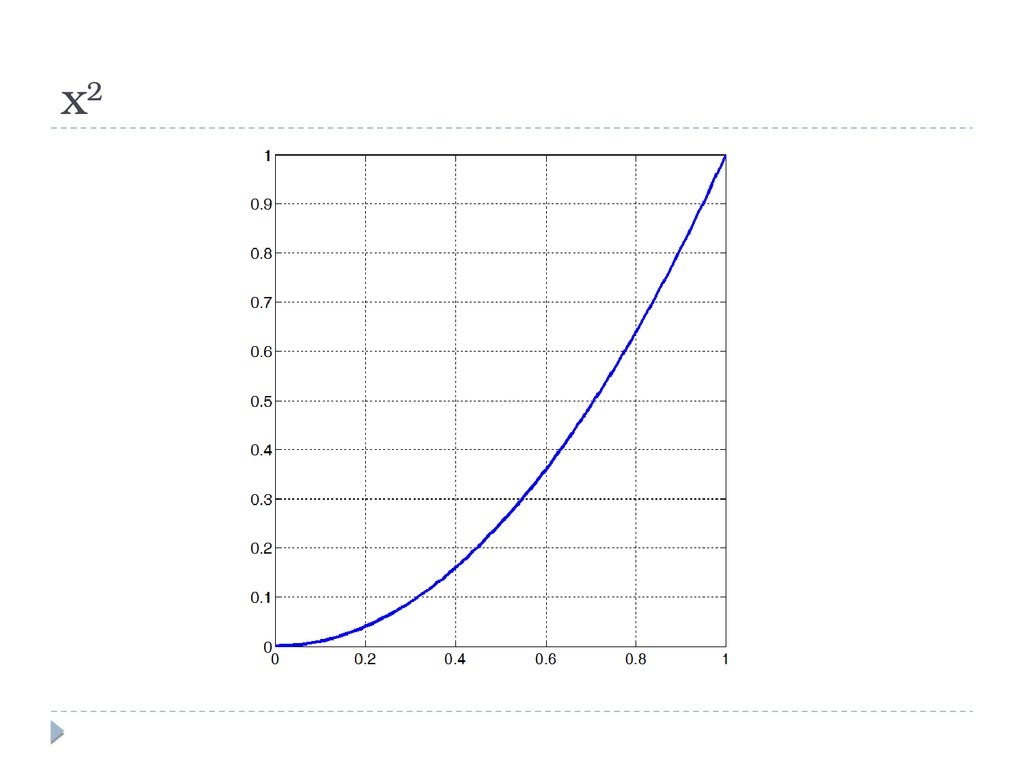
x215.
x316.
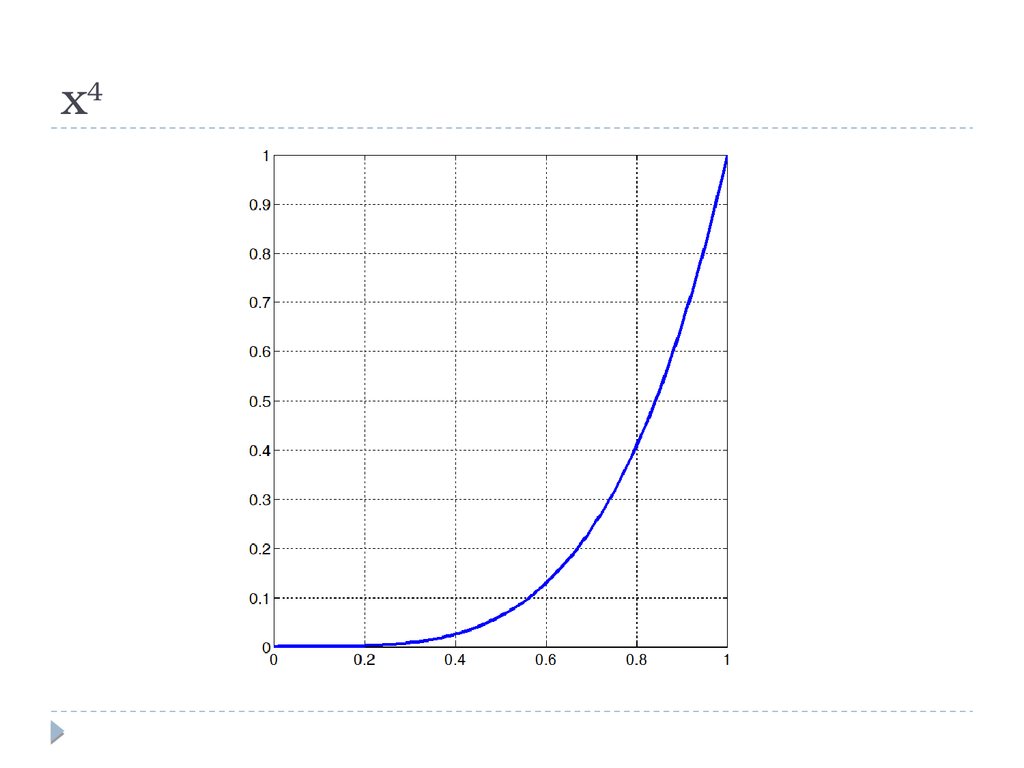
x417.
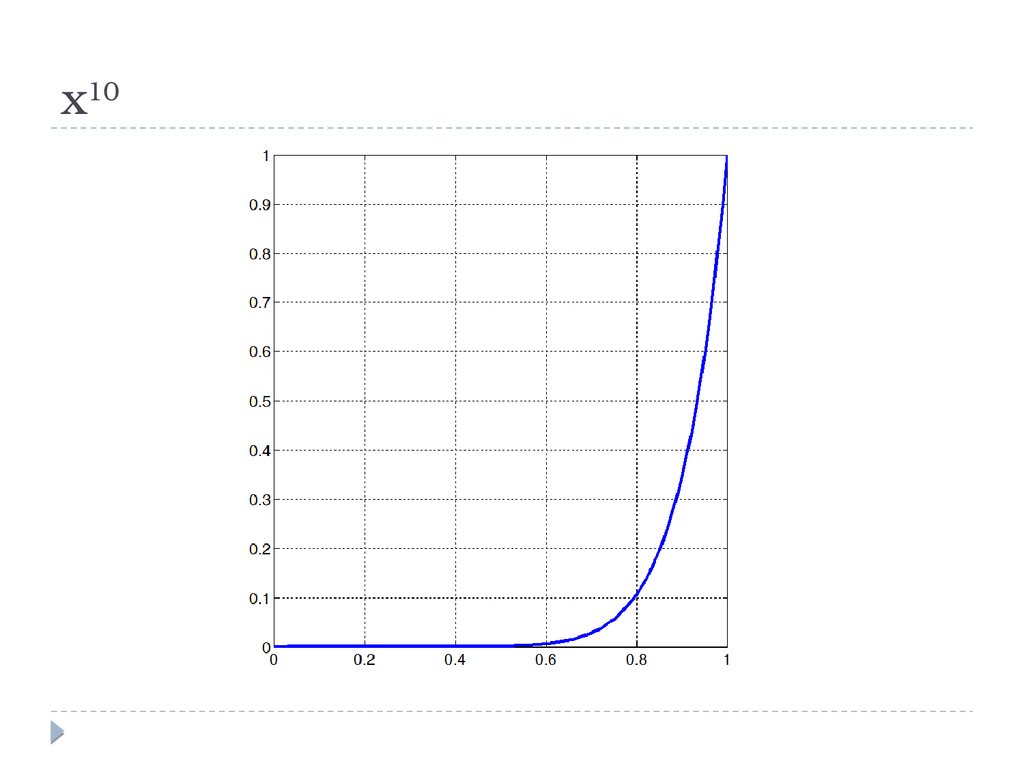
x1018.
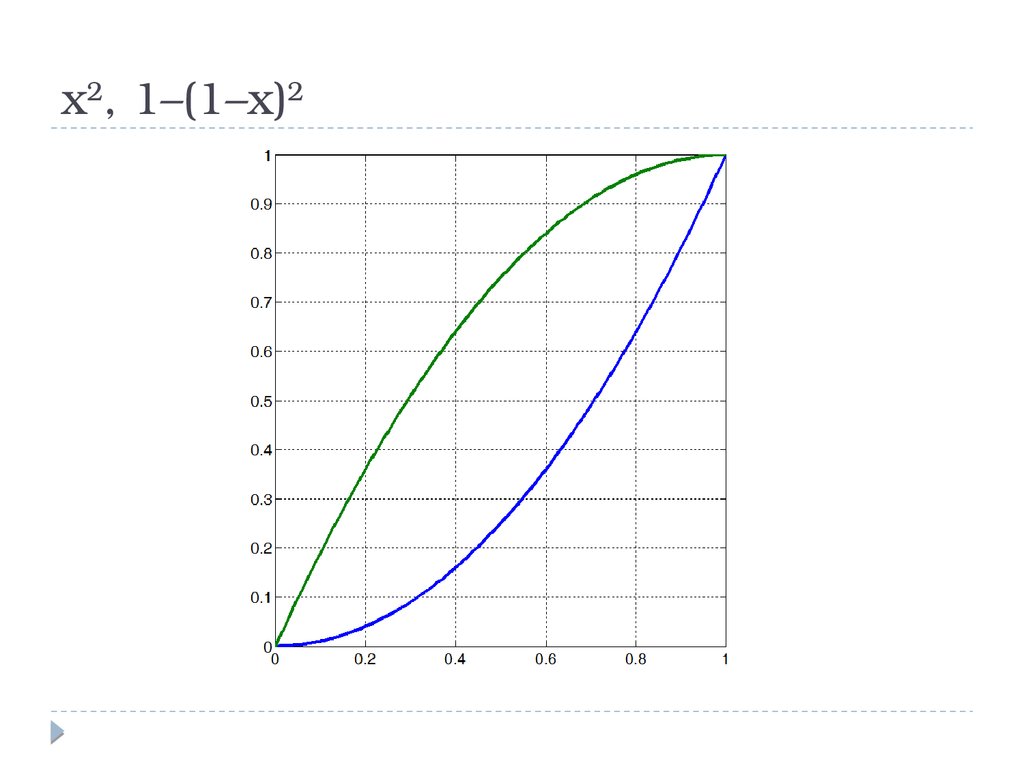
x2, 1–(1–x)219.
x10, 1–(1–x)1020.
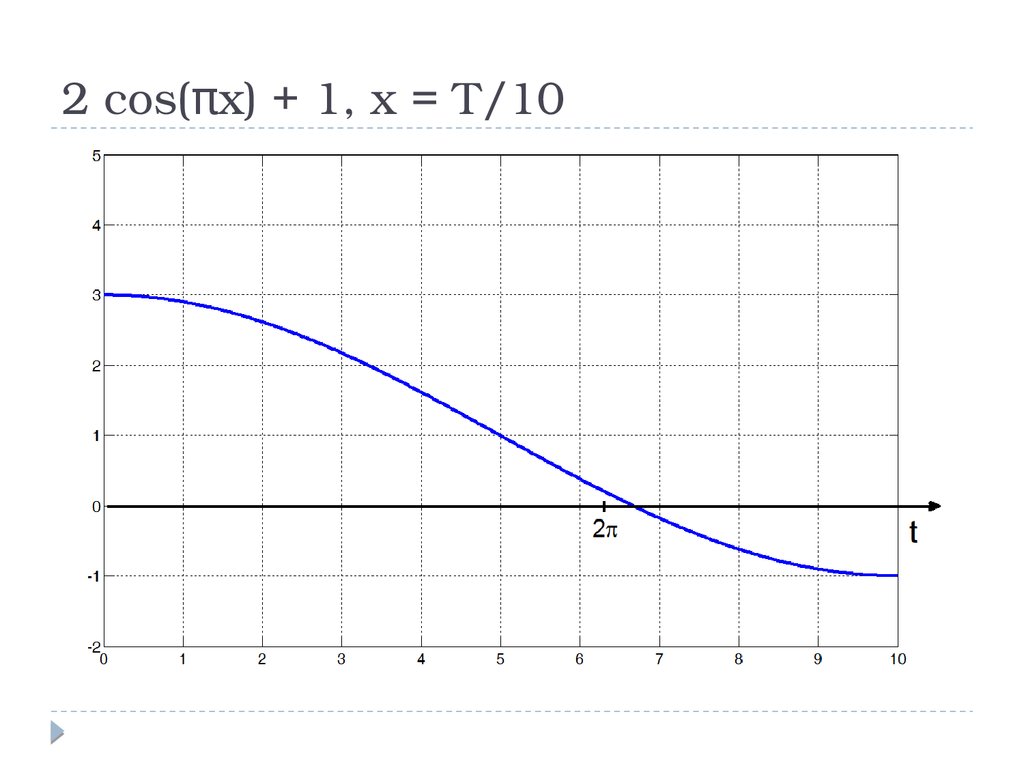
2 cos(πx) + 1, x = T/1021.
2 cos(π x) + 1,x = (T/10)2, x = 1–(1–T/10)2
22.
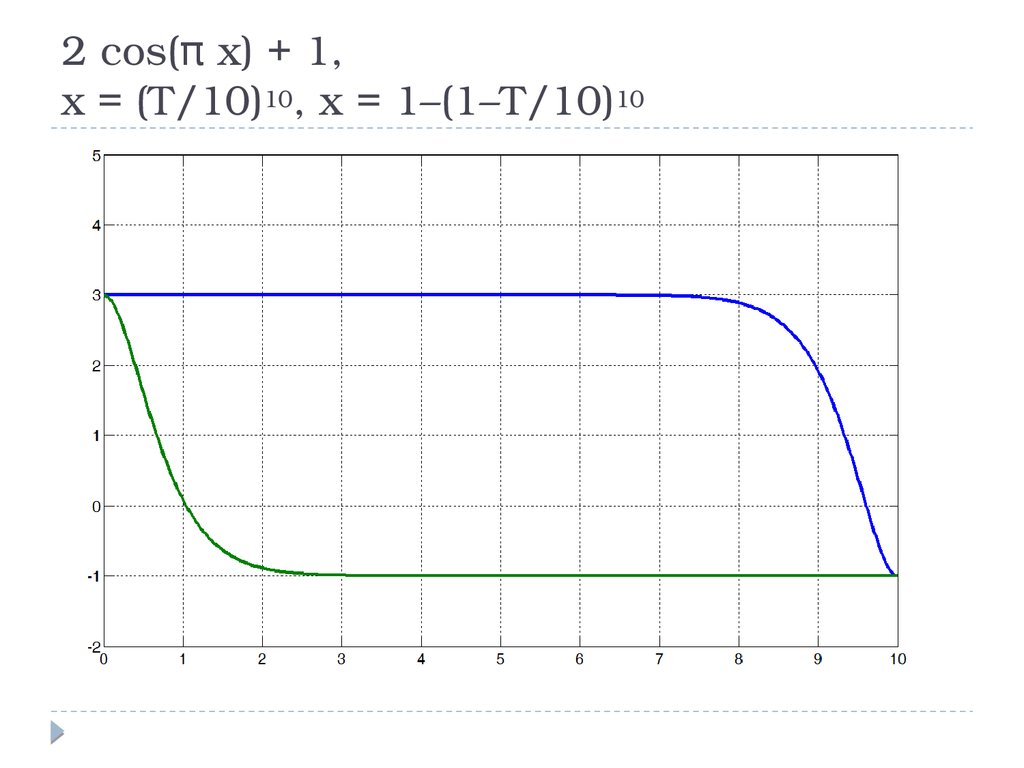
2 cos(π x) + 1,x = (T/10)10, x = 1–(1–T/10)10
23.
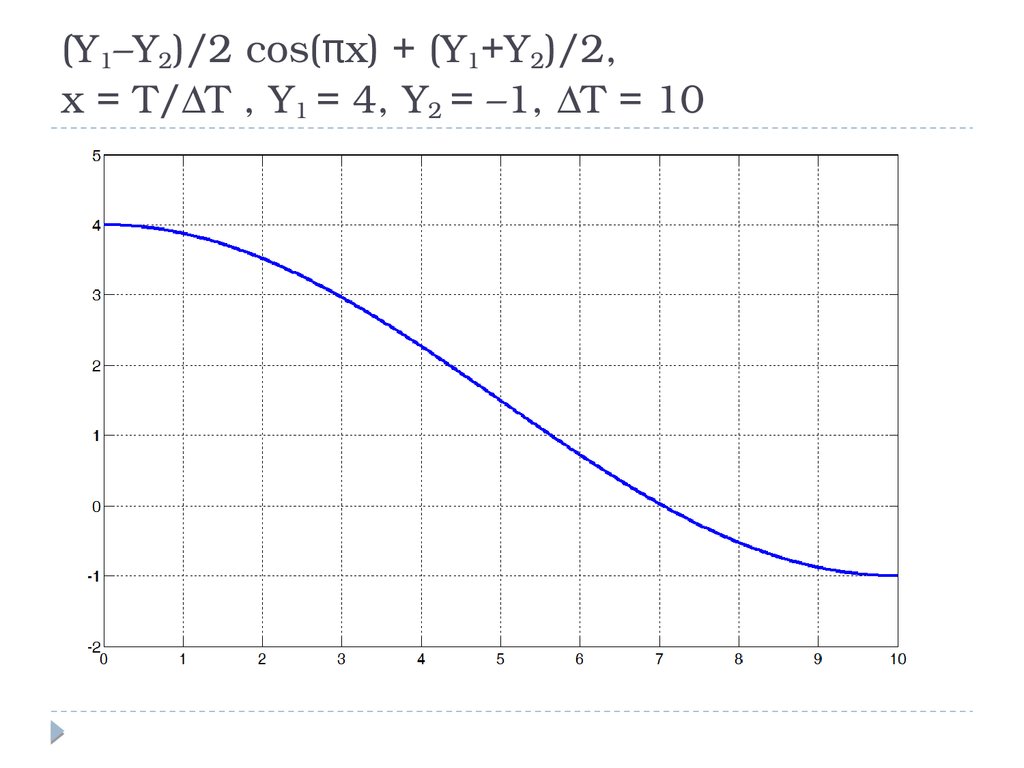
(Y1–Y2)/2 cos(πx) + (Y1+Y2)/2,x = T/∆T , Y1 = 4, Y2 = –1, ∆T = 10
24.
(Y1–Y2)/2 cos(πx) + (Y1+Y2)/2,x = (T/∆T)k , Y1 = 4, Y2 = –1, ∆T = 10, k = 2
25.
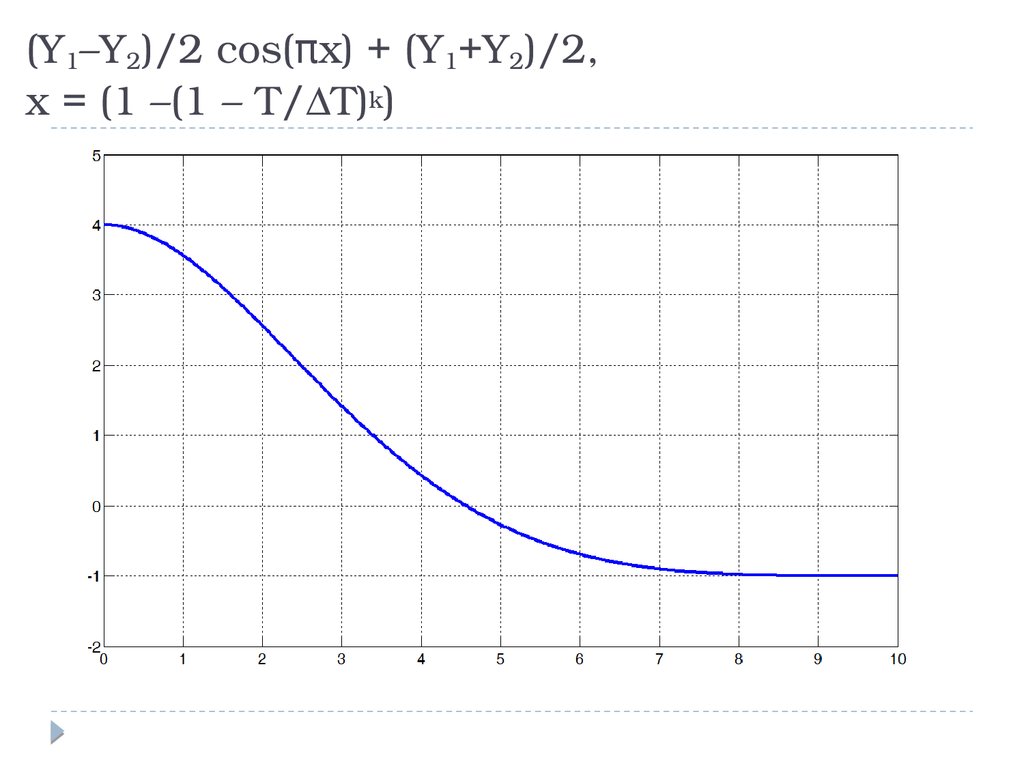
(Y1–Y2)/2 cos(πx) + (Y1+Y2)/2,x = (1 –(1 – T/∆T)k)
26.
k = 1027.
Построение участка кривой1)
Ti 1 ,
Ti ,
3)
Yi ,
k
T Ti 1
,
Ti Ti 1
2)
Yi 1 ,
x
k
T Ti 1
1 1 T T , k 0
i
i 1
Y Y
Y Y
Y i 1 i cos x i 1 i
2
2
k 0
k
28.
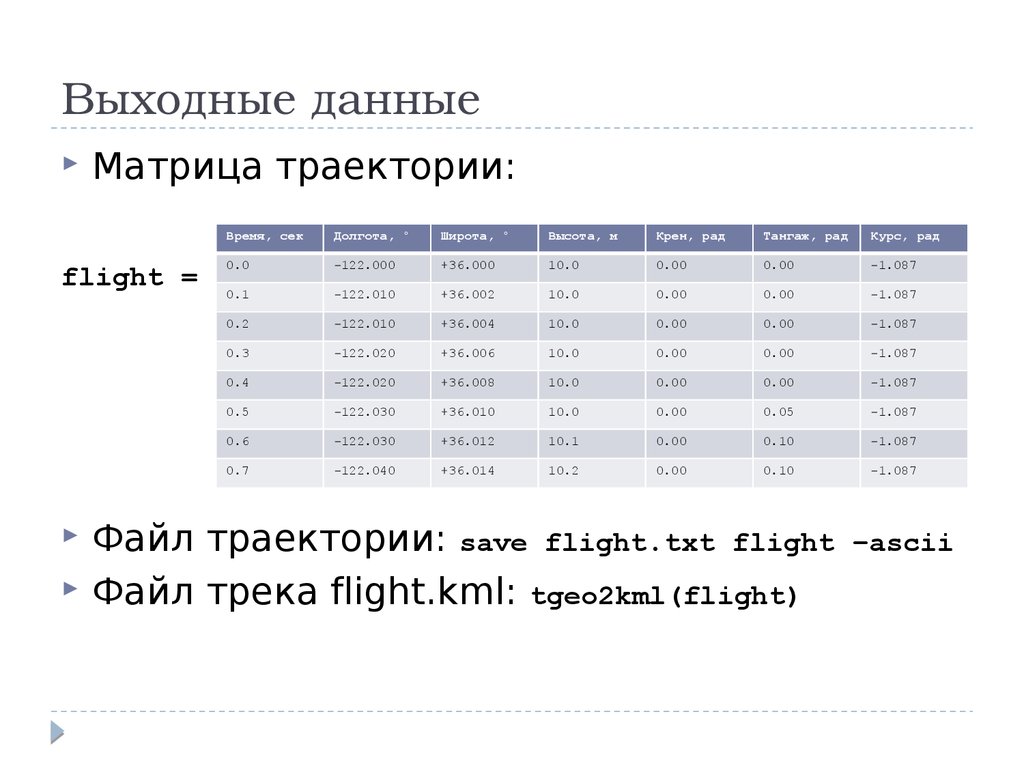
Выходные данныеМатрица траектории:
flight =
Время, сек
Долгота, °
Широта, °
Высота, м
Крен, рад
Тангаж, рад
Курс, рад
0.0
-122.000
+36.000
10.0
0.00
0.00
-1.087
0.1
-122.010
+36.002
10.0
0.00
0.00
-1.087
0.2
-122.010
+36.004
10.0
0.00
0.00
-1.087
0.3
-122.020
+36.006
10.0
0.00
0.00
-1.087
0.4
-122.020
+36.008
10.0
0.00
0.00
-1.087
0.5
-122.030
+36.010
10.0
0.00
0.05
-1.087
0.6
-122.030
+36.012
10.1
0.00
0.10
-1.087
0.7
-122.040
+36.014
10.2
0.00
0.10
-1.087
Файл траектории: save flight.txt flight
Файл трека flight.kml: tgeo2kml(flight)
–ascii