







 Электроника
ЭлектроникаПохожие презентации:







")


Однокристальные микро-ЭВМ
1.
Новосибирский Государственный Технический УниверситетФакультет Радиотехники, Электроники и Физики
И. А. Баховцев
Однокристальные
микро-ЭВМ
2. 7. МС и ШИМ
1) Назначение: реализация управляющих и сервисных функций, необходимых приработе трехфазного АИН с ШИМ.
2) Реализуемые алгоритмы управления: скалярная ШИМ, пространственновекторная ШИМ (ВШИМ) с 4-мя коммутациями на Тs.
3) Объект управления:
4) Вариант реализация скалярной
ШИМ в МПСУ:
-Задать режимы работы МС и ШИМ.
-Задать период и режим счета таймерасчетчика.
-В головной программе рассчи-тывать
текущие коды фазных модулирующих
сигналов и запи-сывать их в регистры
сравнения (дважды буферированные).
Все остальное делается модулем МС
и ШИМ автоматически.
3.
5) Основы представления векторной ШИМВекторы состояния: 000 V0 и 111 V7 – обеспечивают
нулевые напряжения в нагрузке («нулевые» векторы), а
V1 V6 обеспечивают ненулевые напряжения
(«образующие» векторы).
yA
d j = Tj /1
Ts
yB
yC
Вектор
Vi Si
T0
T7
T1Состояния
T2
V
*
=
V
+
V
+
V
+
V7
2
0
0 0 T 1 04
V
Ts 1 Ts
s 0 -T7.
s
,где j =
S1
1 0
06
V2
где Т , Т , Т0, Т7 - время S2
0 1 01 2 02
V3
существования одноименных
S3 S6
0 векторов.
1 1
03
V4
V * = d1V1 + d 2V2 + d0V0 + d7V7
S4
0 0 1
01
V5
Ts = T1 + T2 + T0 + T
S7
5
1 0 1
05
V6
1
æp
ö
d1 = M sin ç j ' ÷
è3
ø
1 1
d1
2 = M sin j '
0
0
0
07d + d V+7 d + d = 1
1
2
0
7
00
V0
4.
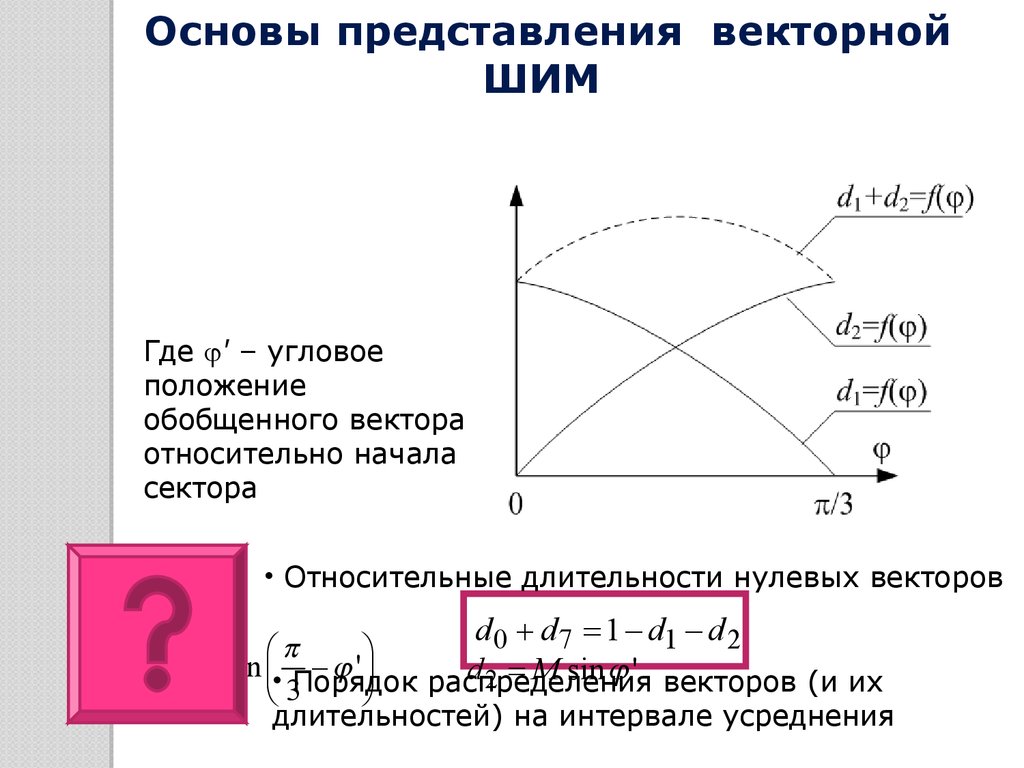
Основы представления векторнойШИМ
Где j' – угловое
положение
обобщенного вектора
относительно начала
сектора
• Относительные длительности нулевых векторов
d0 + d7 = 1 d1 d 2
æp
ö
d1 = M sin ç• Порядок
j '÷
d 2 = M sin j ' векторов (и их
распределения
è3
ø
длительностей) на интервале усреднения
5.
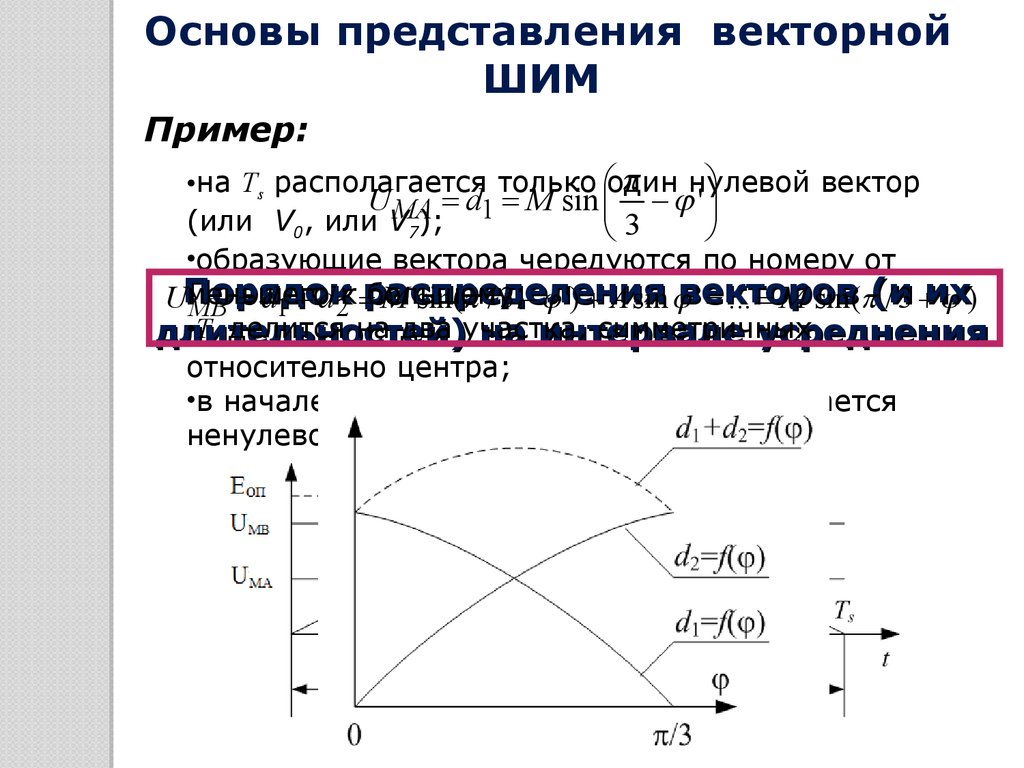
Основы представления векторнойШИМ
Пример:
p
нулевой
вектор
ö
•на Ts располагается только æодин
U MA = d1 = M sin ç j ' ÷
(или V0, или V7);
è3
ø
•образующие вектора чередуются по номеру от
распределения
меньшего
UПорядок
M sin(p / 3 j ') + A sin jвекторов
' = ... = M sin(p(и
/ 3 +их
j ')
MB = d1 + d 2к =большему;
симметричных
•Ts делится на два участка,
длительностей)
на интервале
усреднения
относительно центра;
•в начале интервала усреднения располагается
ненулевой вектор.
6.
6) Вариант реализация векторной ШИМ в МПСУ:-Задать режимы работы МС и ШИМ.
-Задать период и режим счета таймера-счетчика.
-В головной программе рассчитывать текущие коды двух
модулирующих сигналов формирования состояния АИН и
записывать их в соответствующие регистры сравнения (дважды
буферированные).
-Записывать также трехразрядный начальный вектор и
устанавливать направления вращения обобщенного вектора (по
или против часовой стрелки).
Все остальное делается модулем МС и ШИМ автоматически.
7.
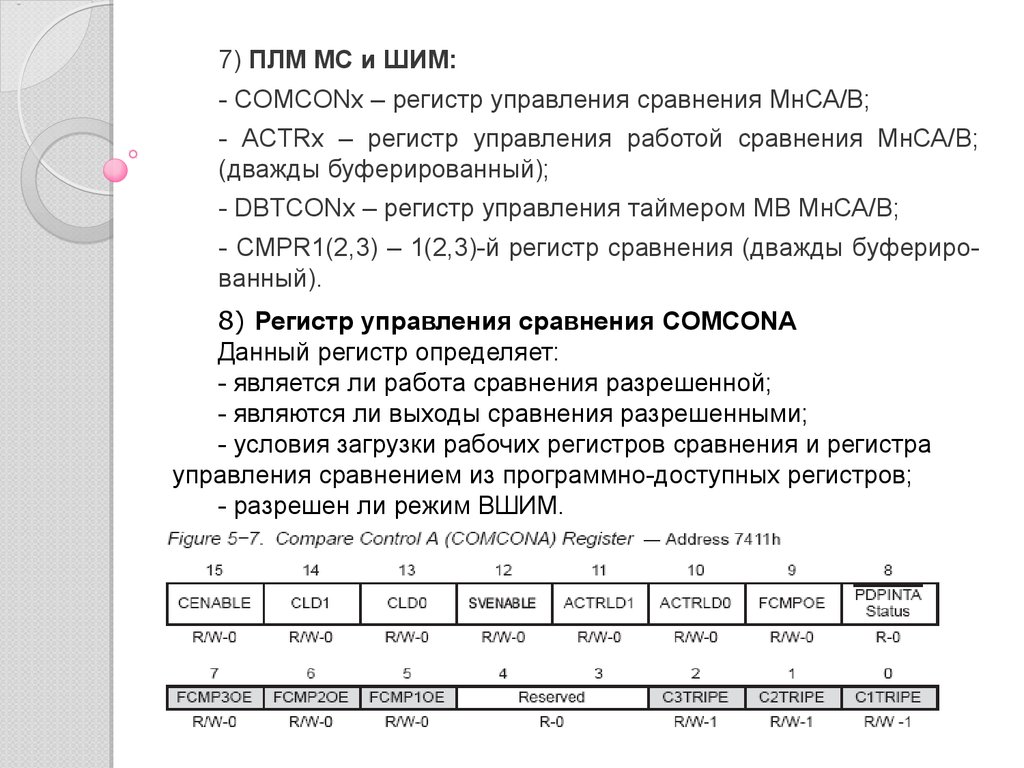
7) ПЛМ МС и ШИМ:- COMCONx – регистр управления сравнения МнСА/В;
- ACTRx – регистр управления работой сравнения МнСА/В;
(дважды буферированный);
- DBTCONx – регистр управления таймером МВ МнСА/В;
- CMPR1(2,3) – 1(2,3)-й регистр сравнения (дважды буферированный).
8) Регистр управления сравнения COMCONА
Данный регистр определяет:
- является ли работа сравнения разрешенной;
- являются ли выходы сравнения разрешенными;
- условия загрузки рабочих регистров сравнения и регистра
управления сравнением из программно-доступных регистров;
- разрешен ли режим ВШИМ.
8.
D15 – CENABLE – бит разрешение сравнения:= 0/1 работа сравнения запрещена/разрешена.
D14-D13 – CLD1, CLD0 – биты задания условия загрузки рабочих регистров
сравнения:
=00 – когда счетчик = 0;
=01 – когда счетчик = 0 или = регистру периода (ОШИМ);
=10 – немедленно;
=11 – резерв.
D12 – SVENABLE – бит разрешения режима ВШИМ:
= 0/1 режим ВШИМ запрещен/разрешен.
D11, D10 - ACTRLD1, ACTRLD0 – биты условия загрузки рабочего регистра
управления работой:
=00 – когда счетчик = 0;
=01 – когда счетчик = 0 или = регистру периода (ОШИМ);
=10 – немедленно;
=11 – резерв.
9.
D9 – FCMPOE – бит разрешения выходов МСиШИМ. Бит активен, когдаEXTCONA(0)=0, иначе – резерв. В активном состоянии этот бит = 0, когда
PDPINTA/T1CTRIP=0 и EVAIFRA(0)=1.
= 0/1 выходы PWM1 – PWM6 в 3-м состоянии/ управляются соответствующей логикой сравнения.
D8 - /PDPINTA Status - бит отражает (дублирует) текущее состояние вывода
/PDPINTA.
D7-D5 - FCMP3OE, FCMP2OE, FCMP1OE – биты разрешения выхода соответственно 3-го, 2-го, 1-го каналов сравнения, т.е. выходов PWM5/6, PWM3/4,
PWM1/2. Биты активны, когда EXTCONA(0)=1, иначе – они в резерве. В активном состоянии этот биты 0, когда соответственно сигналы C3TRIP/ C2TRIP/
C1TRIP = 0 и также разрешены.
= 0/1 выходы соответственно 3-го, 2-го, 1-го каналов сравнения в 3-м
состоянии/ управляются логикой 3-го канала сравнения.
D4-D3 – резерв.
D2 – D1 - C3TRIPE, C2TRIPE, C1TRIPE – биты разрешения соответственно
сигналов отключения C3TRIP, C2TRIP, C1TRIP. Биты активны, когда
EXTCONA(0)=1, иначе – они в резерве.
= 0 сигнал C3(2,1)TRIP запрещен и не влияет на выходы 3-го (2-го, 1-го)
канала сравнения, на COMCONA(8) или на флаг PDPINT (EVAIFRA(0))
= 1 сигнал C3(2,1)TRIP разрешен. Когда C3(2,1)TRIP=0, оба выхода 3-го (2го, 1-го) канала сравнения переходят в 3-е состояние, COMCONA(8) 0 и флаг
PDPINT (EVAIFRA(0)) 1.
10.
9) Регистр управления работой сравнения ACTRАРегистр управление работой сравнения ACTRA управляет действием,
которое происходит на каждом из шести выходов сравнения PWM1-PWM6
по событию сравнения, если работа сравнения разрешена в
COMCONА(15).
ACTRA - дважды буферированный регистр. Условия, по которому
этот регистр перезагружаются, определяется битами в COMCONА. ACTRA
также содержит биты SVRDIR, D2, D1, D0, необходимые для работы
ВШИМ.
D15 – SVRDIR – бит направления вращения обобщенного вектора. Используется только при генерации ВШИМ.
= 0/1 положительное (против ЧС)/ отрицательное (по ЧС) вращение.
D14-D12 – D2-D0 - Биты основных пространственных векторов. Используются только при генерации ВШИМ.
11.
D11, D10 - CMP6ACT1, CMP6ACT0 – бит воздействия на выходнойвывод сравнения PWM6.
=00 – форсированный ноль;
=01 – активный ноль;
=10 – активная единица;
=11 – форсированная единица.
Оставшиеся пять пар разрядов – то же самое для выводов сравнения соответственно PWM5-PWM1.
10) Регистр управления таймером МВ МСА
12.
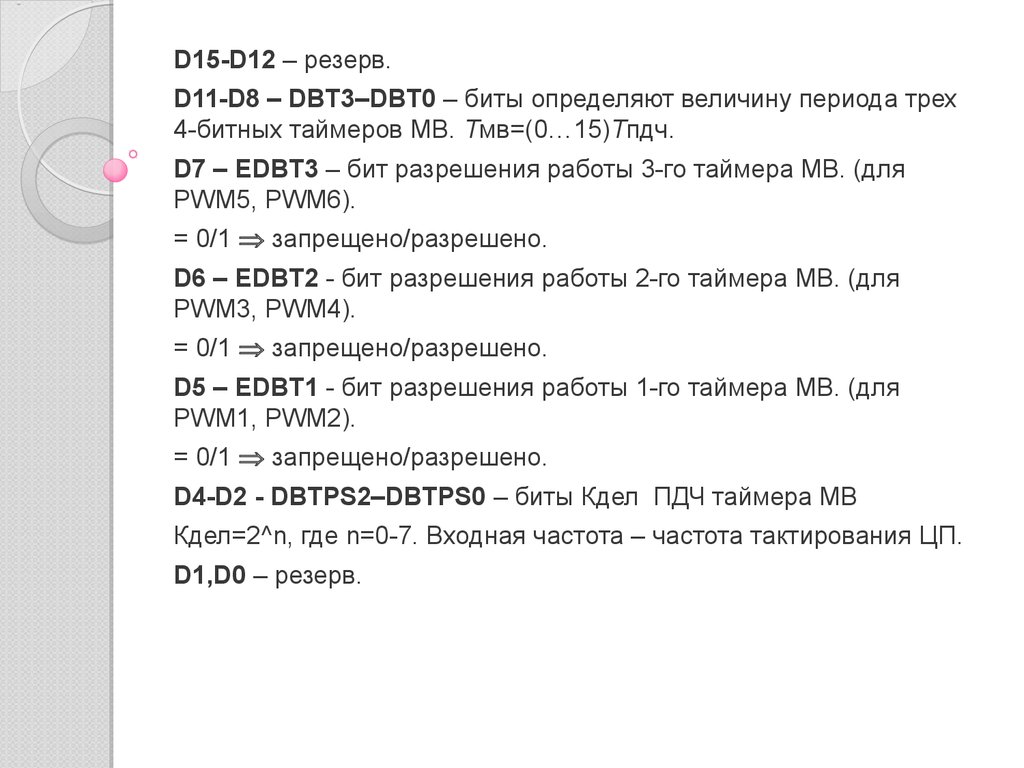
D15-D12 – резерв.D11-D8 – DBT3–DBT0 – биты определяют величину периода трех
4-битных таймеров МВ. Тмв=(0…15)Тпдч.
D7 – EDBT3 – бит разрешения работы 3-го таймера МВ. (для
PWM5, PWM6).
= 0/1 запрещено/разрешено.
D6 – EDBT2 - бит разрешения работы 2-го таймера МВ. (для
PWM3, PWM4).
= 0/1 запрещено/разрешено.
D5 – EDBT1 - бит разрешения работы 1-го таймера МВ. (для
PWM1, PWM2).
= 0/1 запрещено/разрешено.
D4-D2 - DBTPS2–DBTPS0 – биты Кдел ПДЧ таймера МВ
Кдел=2^n, где n=0-7. Входная частота – частота тактирования ЦП.
D1,D0 – резерв.