











")
")

.")






 загрузка технологического оборудования (REIS Robot)")

 лазерная резка (REIS Robot)")
")














 Механика
Механика Электроника
ЭлектроникаПохожие презентации:










Декартовые базисы программирования движения
1. Декартовые базисы программирования движения
Z0αz
X1
Рабочий
орган
машины
X3
Измерительная система
Y1
Y3
Z1
Z3
αx
X0
αy
Y0
Z2
Y2
X2
Объект
работ
2. Станок с декартовым базисом исполнения движений
q3z
где
q1
x
q2
dX a1 dq1
dY a 2 dq 2
dZ a 3 dq 3
ai const
(i 1,2,3)
3.
Робот с декартовым базисом исполнения движений4.
Робот с декартовым базисом исполнения движений5.
Робот с декартовым базисом исполнения движений6. Рабочая зона манипулятора
r,m0‹r ‹ 1
q2, град
0 ‹ q2 ‹ 90
0 ‹ q2 ‹ 180
0.2 ‹ r ‹ 0.8
7.
Робот с нелинейным базисом исполнения движений(цилиндрическая система координат)
8.
Робот с нелинейным базисом исполнения движений(цилиндрическая система координат)
9.
Робот с нелинейным базисом исполнения движений(цилиндрическая система координат)
10.
Робот с нелинейным базисом исполнения движений(сферическая система координат)
11.
Робот с нелинейным базисом исполнения движений(сферическая система координат)
12.
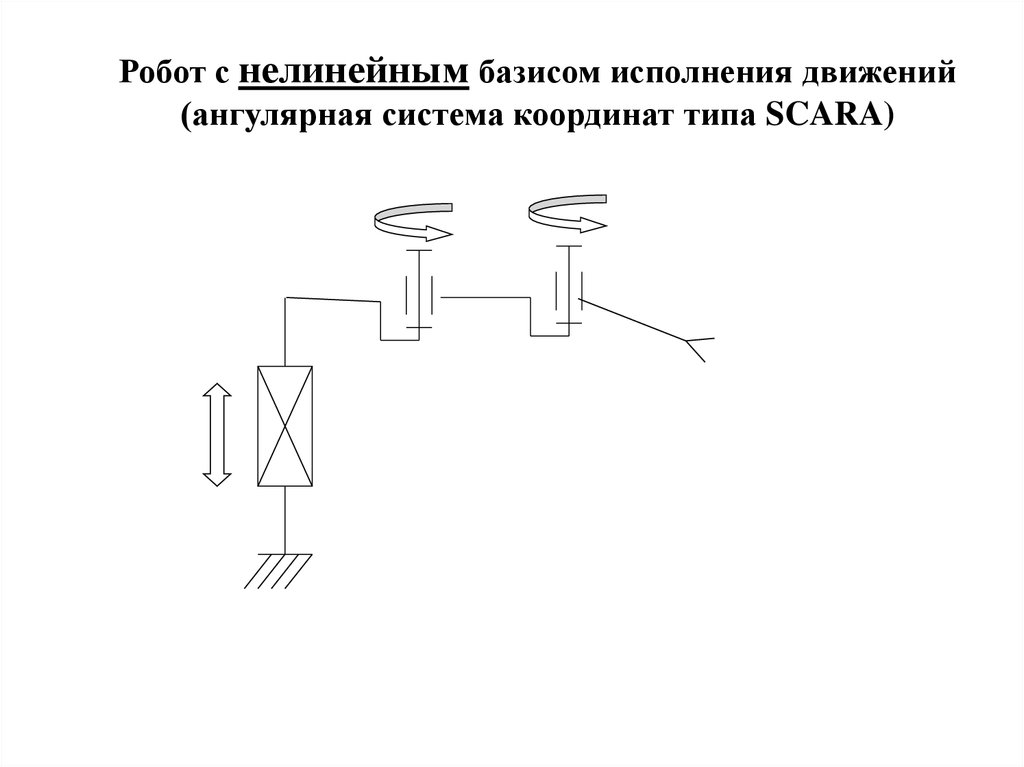
Робот с нелинейным базисом исполнения движений(ангулярная система координат типа SCARA)
13. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1= L2 )
14. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1= L2 )
IIIII
I
15. Границы рабочей зоны
L1 L2,0 q1 90 ,0 q2 180Граница1: вытянутый манипулятор,
поворот звена 2, звено 1 неподвижно
Граница2: вытянутый манипулятор,
поворот звена 1, звено 2 неподвижно
Граница3: звено 1 вдоль оси Y,
поворот звена 2, звено 1 неподвижно
16. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2 ).
17.
Робот с нелинейным базисом исполнения движений(ангулярная система координат типа SCARA)
18.
Робот с нелинейным базисом исполнения движений(ангулярная система координат типа SCARA)
19.
Робот с нелинейным базисом исполнения движений(ангулярная система координат типа PUMA)
20.
Робот с нелинейным базисом исполнения движений(ангулярная система координат типа PUMA)
21.
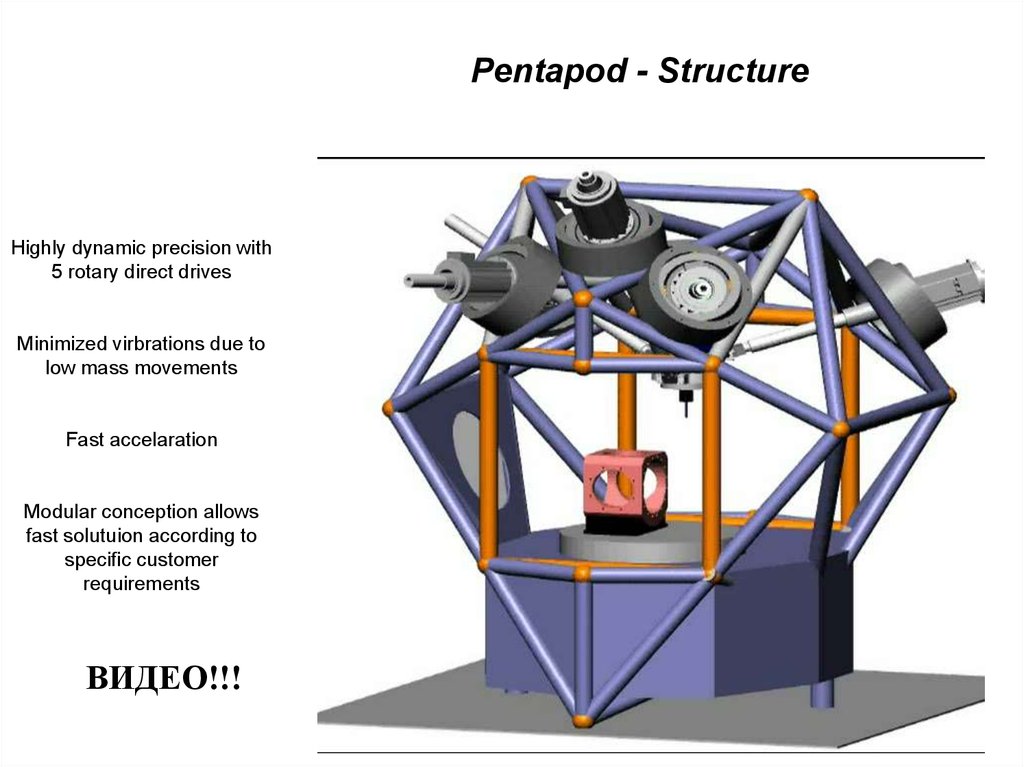
Pentapod - StructureHighly dynamic precision with
5 rotary direct drives
Minimized virbrations due to
low mass movements
Fast accelaration
Modular conception allows
fast solutuion according to
specific customer
requirements
ВИДЕО!!!
22.
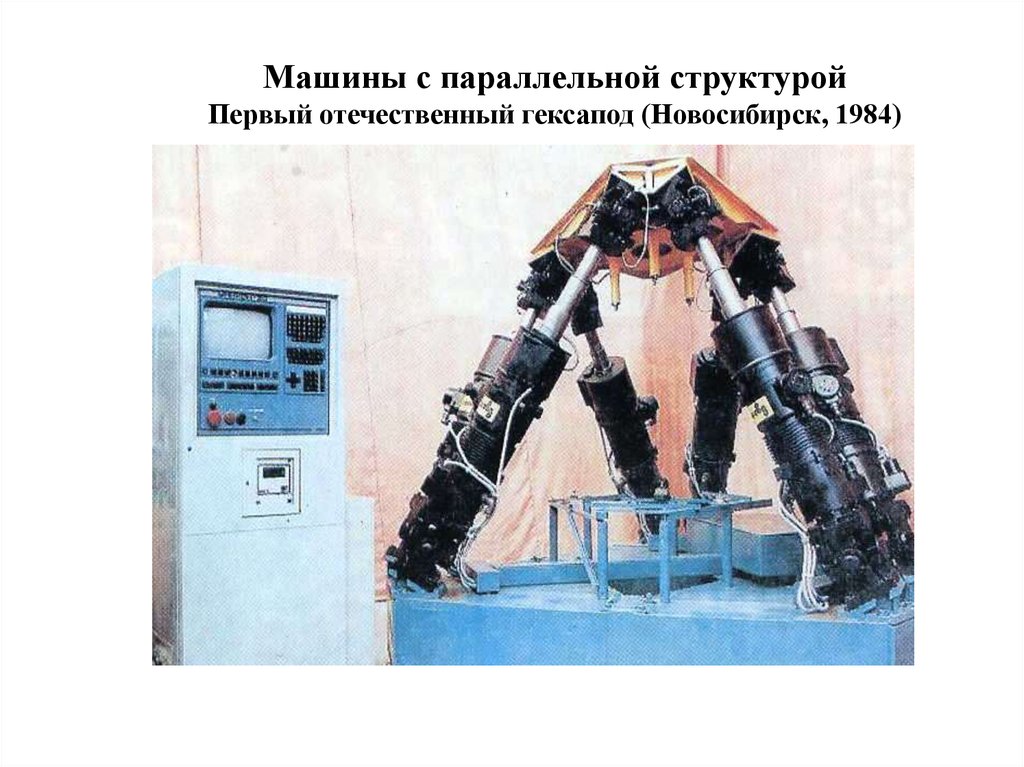
Машины с параллельной структуройПервый отечественный гексапод (Новосибирск, 1984)
23.
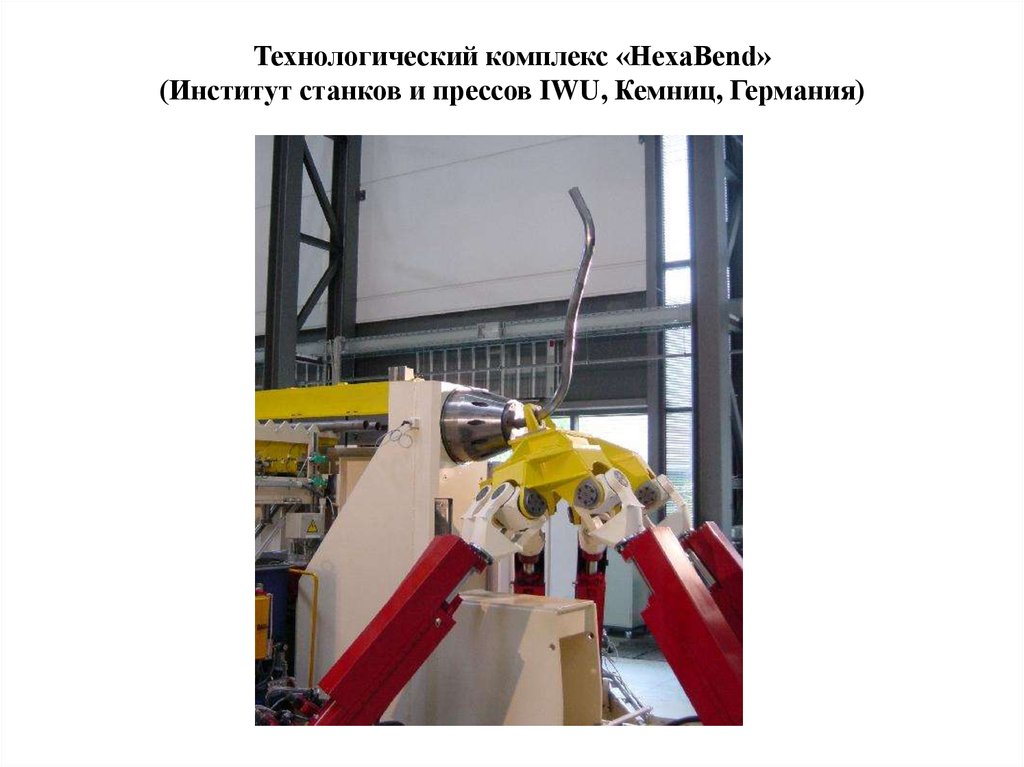
Технологический комплекс «HexaBend»(Институт станков и прессов IWU, Кемниц, Германия)
24.
Машины с гибридной структуройТехнологический комплекс «Dynapod»
(Институт станков и прессов IWU, Кемниц, Германия)
25. Цикловое управление
Исходное положениеЦелевое положение
Pm
P0
Движения всех звеньев робота
происходит из начального в
целевое положение, которое
задается механическими
упорами или электрическими
конечными выключателями
26. Позиционное управление
Промежуточные точкиИсходное
положение
P0
P1
P2
P3
Целевое
положение
Pm
Движения всех звеньев робота
происходит из начального в
целевое положение через
промежуточные точки, заданные
в программе. Траектория
рабочего органа между точками
не задается.
27. Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)
28. Контурное управление
P0P1P2P3Pm - программная траекторияV(t) – контурная скорость
V
P0
P1
P2
P3
Pm
Программа движения задает
траекторию рабочего органа в
декартовом пространстве и во
времени
29. Контурное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
30. Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ)
1 – манипулятор PUMA-560, 2 – устройство управления Сфера-36,3 – рабочий орган, 4 – компьютер верхнего уровня управления,
5
– информационное устройство, 6 – стол с заготовкой
31.
Адаптивное управление(на основе информации о возмущающем воздействии)
32. Конструкция силомоментного датчика
С.А.Воротников Информационные устройства робототехническихсистем, Изд-во МГТУ им. Баумана, 2005
33.
Основные части нервной клетки (нейрона)34.
Структура нейронной сетиANNs are taught by system developer at concrete cases. While teaching the developer gives
information on inputs and corresponding desired outputs. Special tuning programme automatically
selects weight coefficients the way to get correspondence. The learning is repeated at all known
examples accumulating existing experience.This way the tuned net is ready for solution of new tasks
for other combinations of inputs. The main specifics of ANN method is in the fact that developer
doesn't need to programme clear task solution algorithm. He only needs to dive the input and output
data for teaching.
35.
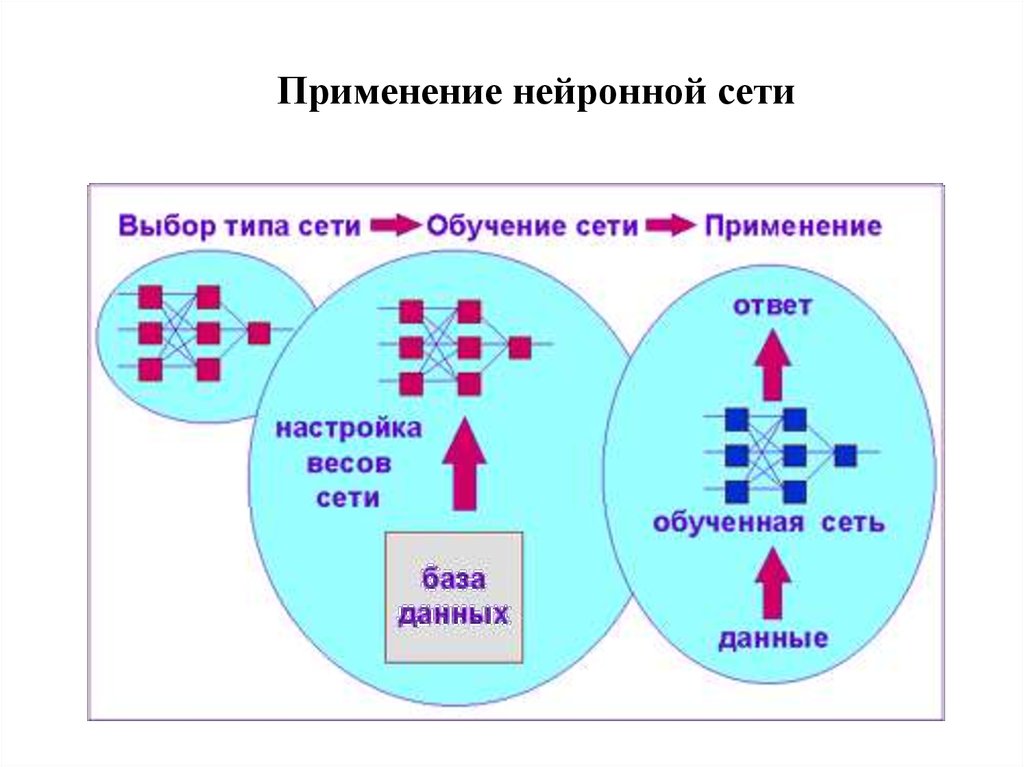
Обучение нейронной сети36.
Применение нейронной сети37. Кинематические задачи в робототехнике и мехатронике - Прямая задача о положении многозвенного механизма - Обратная задача о
положении- Прямая задача о скорости
- Обратная задача о скорости
- Прямая задача об усилии
- Обратная задача об усилии
38.
Примерy
P
q1= r
q2
x
39. Прямая задача о положении многозвенного механизма
Постановка задачи:Определить вектор положения концевой
точки (рабочего органа) в декартовой системе
координат по заданным обобщенным
координатам многозвенного механизма
X f (q )
T
X [ xyz x y z ]
T
q [ q1q2 ...qn ]
40.
Примерx r cos( q 2) q1 cos( q 2)
y r sin( q 2) q1 sin( q 2)
41. Обратная задача о положении многозвенного механизма
Постановка задачи:Определить обобщенные координаты
многозвенного механизма по заданному
вектору положения концевой точки (рабочего
органа)
q f 1 ( X )
if
qi min qi qi max,
i 1,..., n
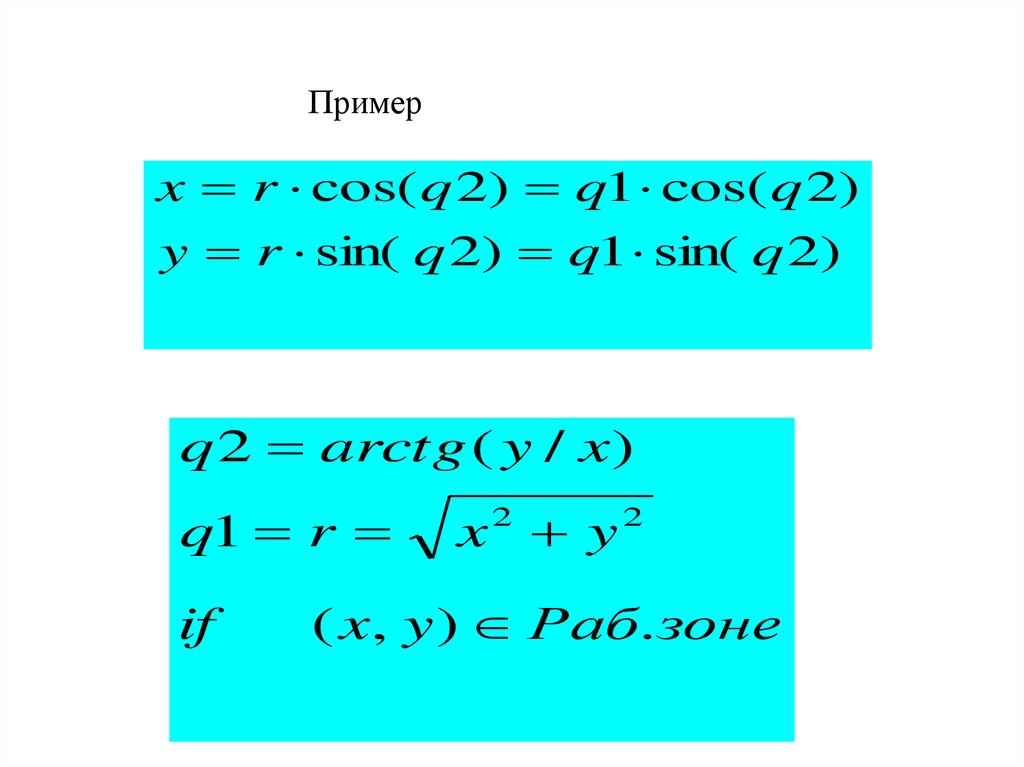
42.
Примерx r cos( q 2) q1 cos( q 2)
y r sin( q 2) q1 sin( q 2)
q 2 arctg ( y / x )
q1 r
if
x2 y 2
( x, y ) Раб.зоне
43. Прямая задача о скорости многозвенного механизма
Постановка задачи:Определить вектор скорости концевой точки
(рабочего органа) по заданным обобщенным
скоростям многозвенного механизма
dq
V J
dt
44. Прямая задача о скорости многозвенного механизма
zV
dq n
dt
P
dq 2
dt
Ω
dq1
dt
x
y
dX
V
[VxVyVz x y z ]T
dt
dqn
dq
dq1 dq2
[
,
,...,
]
dt
dt dt
dt
45.
dx x dq1 x dq2dt q dt q dt
1
2
dy y dq1 y dq2
dt q1 dt q2 dt
dX
dq
J
dt
dt
x
q1
J
y
q1
x
q 2
y
q 2
46. Пример
dxdq1
dq2
(cos q2 )
( q1 sin q2 )
dt
dt
dt
dy
dq1
dq2
(sin q2 )
( q1 cos q2 )
dt
dt
dt
x
q1
J
y
q1
x
q 2 cos q 2 q1 sin q 2
y sin q 2 q1 cos q 2
q 2
47. Обратная задача о скорости многозвенного механизма
Постановка задачи:Определить обобщенные скорости
многозвенного механизма по заданному
вектору скорости концевой точки
(рабочего органа).
dq
1
J V
dt
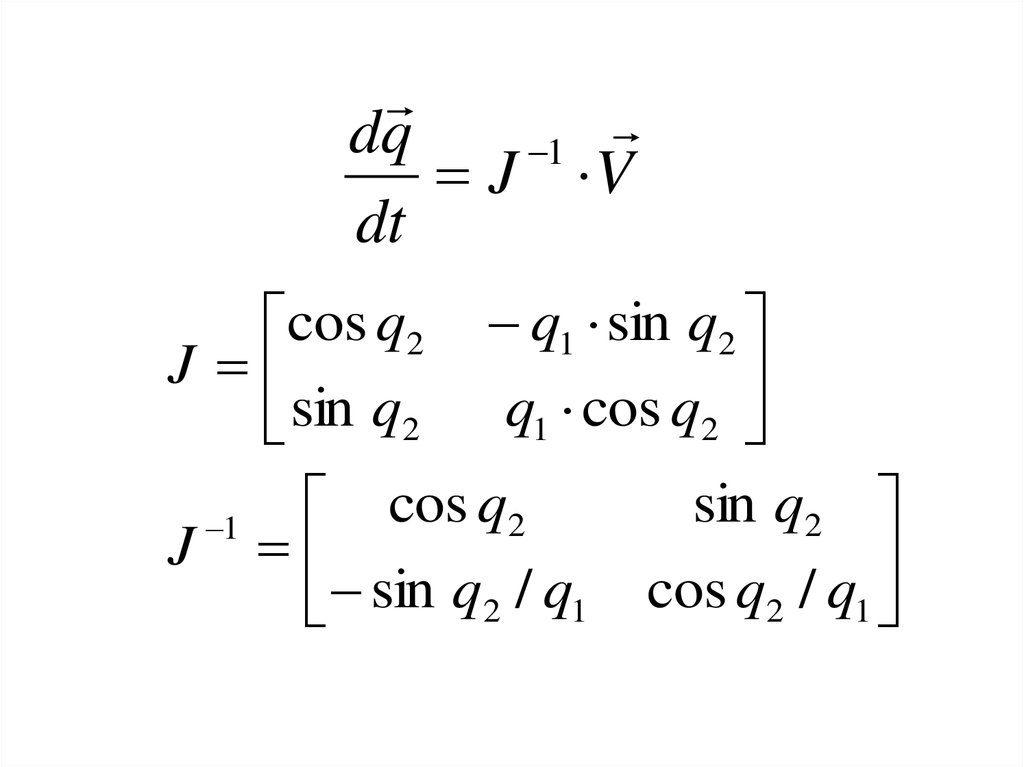
48.
dq1
J V
dt
cos q2 q1 sin q2
J
sin q2 q1 cos q2
sin q2
cos q2
1
J
sin q2 / q1 cos q2 / q1