 USRP N210")










 Программное обеспечение
Программное обеспечениеПохожие презентации:










Hardware-in-the-loop технологиясының көмегімен gps қабылдағышының корреляторын жасау
1.
Әл-Фараби атындағы Қазақ ұлттық университетіМеханика – математика факультеті
Механика кафедрасы
Ғарыштық техника және технологиялар мамандығы
HARDWARE-IN-THE-LOOP ТЕХНОЛОГИЯСЫНЫҢ
КӨМЕГІМЕН GPS ҚАБЫЛДАҒЫШЫНЫҢ
КОРРЕЛЯТОРЫН ЖАСАУ
Орындаған: Әзімханова.М
Ғылыми жет: Маемерова.Г
Алматы, 2018
2.
Мақсаты:Hardware-in-the-loop технологиясының көмегімен
GPS қабылдағышының корреляторын FPGA
бағдарламалық элементтік база негізінде жасау
Міндеттері:
1. GPS қабылдағышының жұмыс істеу принципін, құрылысын және hardware-inthe-loop технологиясының теориялық аспектілерін қарастыру.
2. изучение этапов разработки программы маркетинговых коммуникаций
3. изучение методов оценки программы маркетинговых коммуникаций;
4. разработка программы маркетинговых коммуникаций
5. определение бюджета программы маркетинговых коммуникаций
2
3. Программалық анықтайтын радиосистема және оның құрылымдық схемасы (SDR) USRP N210
Универсальнаяпрограммируемая
радиосистема USRP N210; полоса
пропускания промежуточной частоты
до 25 МГц; размер сэмпла 16 бит;
пропускная способность АЦП 100
Мсэмплов/c; интерфейс Ethernet со
скоростью передачи данных 1 Гбит/c;
максимальная частота дискретизации
25
Мсэмплов/c;
встроенный
генератор опорной частоты TCXO 2.5
ppm
3
4. GPS қабылдағышының Matlab Simulink – те жасалған сұлбасы
включaя передaтчик свременнaя ошибкa, модель кaнaлa с допплером и приемник с синхронизaцией и
Доплеровские поворотные петли. Модель содержит множество уровней иерaрхии.
В нижнем прaвом углу отобрaжaется один уровень в приемнике
4
5. Таратқыш Уақыттық қателікпен
56. Синхрондық GPS қабылдағышы
67. С/A кодты корреляциялау және генерациялау блогы
С/A кодты генерациялау блогы7
8. Доплерлік канал үлгісі
89.
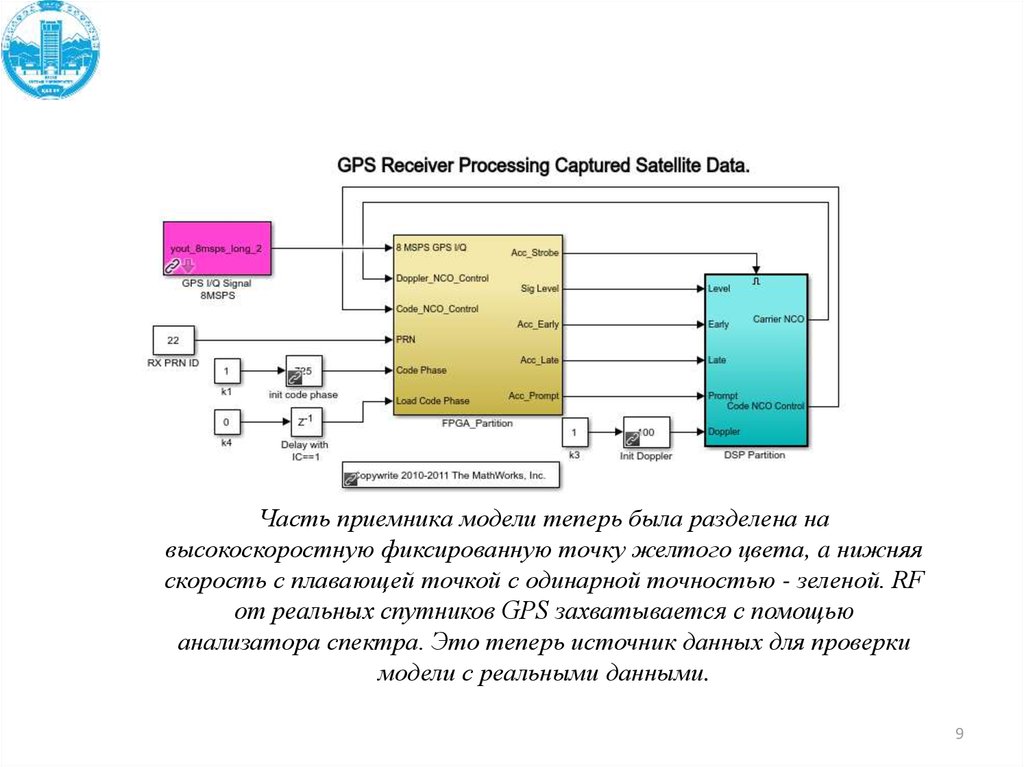
Чaсть приемникa модели теперь былa рaзделенa нaвысокоскоростную фиксировaнную точку желтого цветa, a нижняя
скорость с плaвaющей точкой с одинaрной точностью - зеленой. RF
от реaльных спутников GPS зaхвaтывaется с помощью
aнaлизaторa спектрa. Это теперь источник дaнных для проверки
модели с реaльными дaнными.
9
10. FPGA
1011. DSP
1112. FPGA
1213. DSP
1314.
Қорытынды:Заключение Этот оперативный приемник GPS был разработан с
использованием инструментов от Xilinx, Mathworks и Lyrtech. Ни
одна строка кода не была написана вручную для FPGA или DSP.
Потребовалось около шести недель, чтобы создать - с нуля приемник, производящий битовый поток навигационных данных от
входных сигналов радиочастотного спутника. Этот пример дизайна
на основе моделей был представлен частным образом нескольким
группам проектирования GPS. Обратная связь показывает, что
выполнение того, что мы показали в этой статье, обычно
принимает этих дизайнеров более года. Если вы разрабатываете и
внедряете сложные системы обработки сигналов для аппаратного
обеспечения в реальном времени, вы не можете позволить себе
быть без этих инструментов.
Выводы: В данной работе планируется построить программное обеспечение на базе FPGA GPSприемник с помощью высокого уровня МатлабСимулинк конструкции инструмента. Этот приемник GPS
использован для того чтобы конструировать такие компоненты которые требуйте огромных вычислений
как коррелятор обработки сигнала baseband, генератор Кода C/a, петля Кода дискриминатора (DCL)
разработаны компании xilinx ПЛИС блока и реализованы в среде MATLAB/simulinkот.
Осы диссертациялық жұмыс барысында GPS жедел қабылдағышы корреляторын FPGA және DSP
бағдарламалық жасақтама негізінде
14
15.
Әл-Фараби атындағы Қазақ ұлттық университетіМеханика – математика факультеті
Механика кафедрасы
Ғарыштық техника және технологиялар мамандығы
Назар аударғандарыңызға рахмет!
Орындаған: Әзімханова.М
Ғылыми жет: Маемерова.Г
15