























 Промышленность
ПромышленностьПохожие презентации:

")

")

")

 гидромашины")

")
Радиально-поршневые гидромашины
1. Лекция 6
Радиально-поршневые гидромашины2.
1 – кривошип;2 – шатун;
3 – кулиса;
4 – поршень;
5 - цилиндр
За каждый оборот кривошипа поршень совершает два хода
3.
Поршневой насос с подвижной кулисой1 – кривошип; 2 – шатун; 3 – кулиса; 4 – поршень; 5 - цилиндр
• четырехзвенный механизм;
• неподвижный кривошип, а кулиса вращается
Как снизить неравномерность подачи?
• можно использовать многопоршневую схему,
расположив цилиндры звездообразно.
4.
Кинематическая схема РПГ, полученная путем инверсиикривошипного механизма
1 – ротор, 2 – статор, 3 – поршень, 4 - цапфа
Цапфа неподвижна (подвод через входные (С1) и выходные
(С2) окна)
5.
Барабан может свободно вращаться, увлекаемыйприжатыми к нему поршнями
Такое конструктивное решение:
• уменьшает потери на трение поршней о статора;
• снижает износ поршней;
• позволяет довести давление до 21МПа.
6.
Давление выше 21 МПа лимитируется прогибомраспределительной цапфы:
• повышенные зазоры (утечки, вязкость, потери на
трение, КПД);
• заедание ротора.
Радиальное расположение поршней требует
достаточно большого диаметра ротора
Моменты инерций вращающихся частей
достаточно большие
7.
Классификация РПГ• гидромашины с цилиндрической
направляющей статора и принудительным
ведением поршней;
• гидромашины с конической направляющей и
прижимом поршней за счет центробежных
сил.
8.
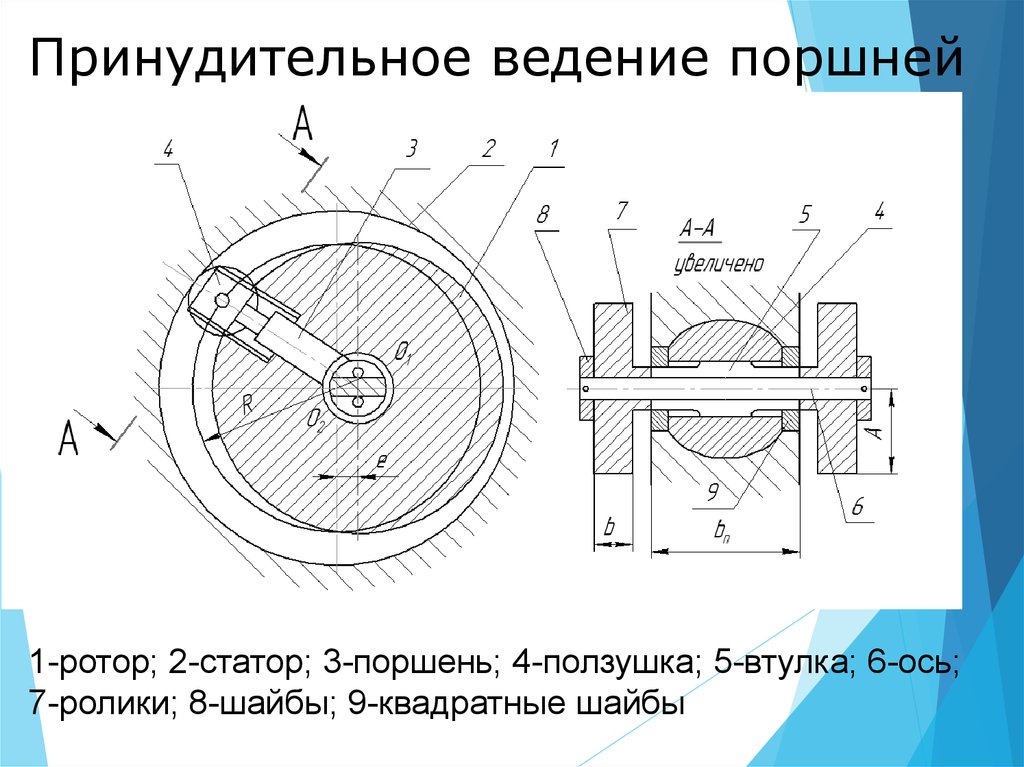
Принудительное ведение поршней1-ротор; 2-статор; 3-поршень; 4-ползушка; 5-втулка; 6-ось;
7-ролики; 8-шайбы; 9-квадратные шайбы
9.
Установка поршня с ползушкойв расточке ротора
• применяется обычно в самовсасывающих насосах;
• поршни полностью разгружены от изгибающих усилий.
10.
Прижим поршней центробежнымисилами
• используется при избыточном давлении на всасывании
(поршни прижимаются к направляющей в момент пуска).
11.
Производительность РПГСредняя геометрическая подача насоса
z d 2
Qср V0 n
2e n
4
где z – число поршней
d - диаметр поршня;
2е - ход поршня за один оборот ротора;
n - частота вращения приводного вала.
Гидромашины регулируемы (е - параметр регулирования)
Влияет на ход поршня и, следовательно, подачу насоса.
12.
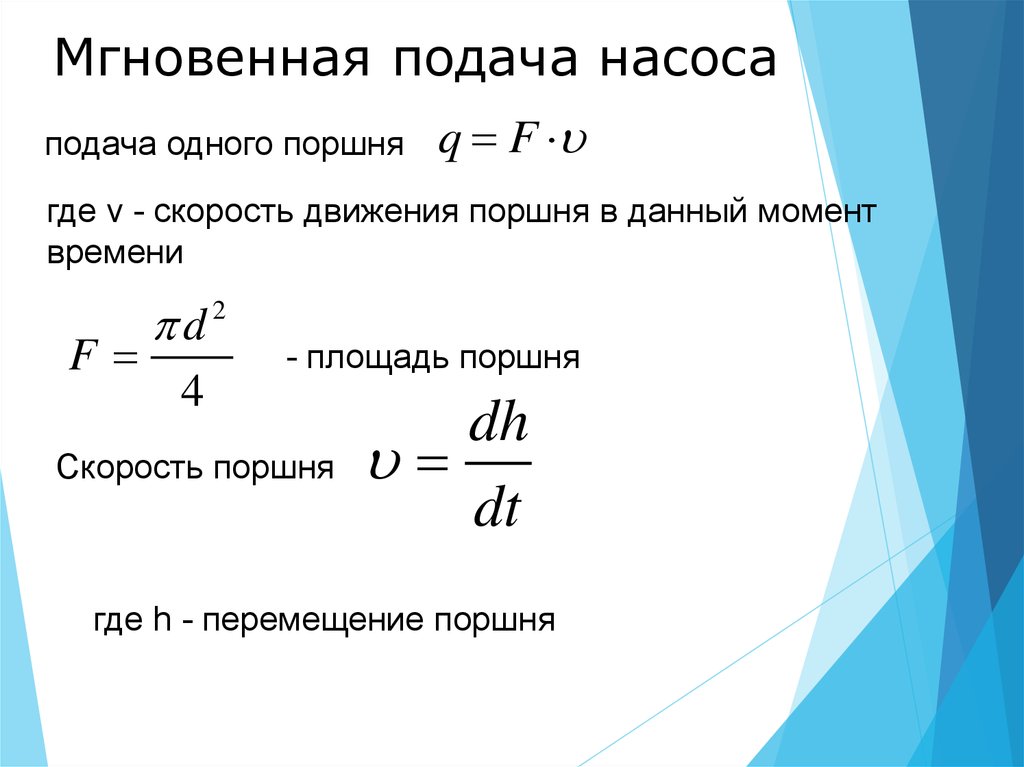
Мгновенная подача насосаподача одного поршня q F
где v - скорость движения поршня в данный момент
времени
F
d2
4
- площадь поршня
Скорость поршня
dh
dt
где h - перемещение поршня
13.
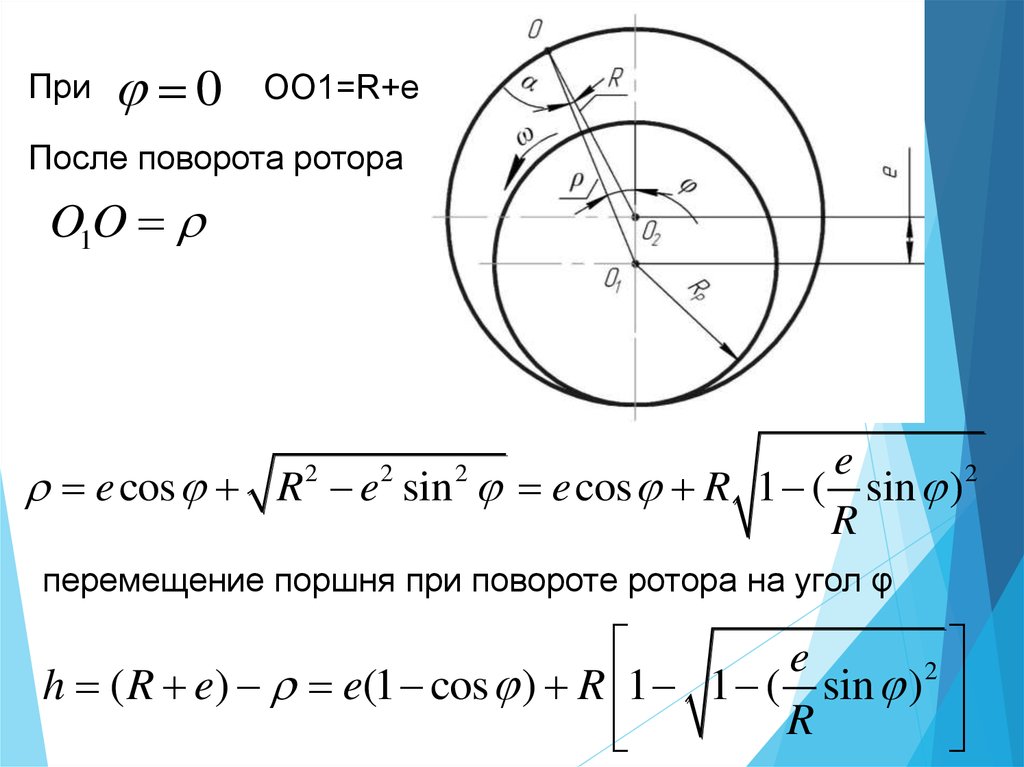
При0
ОO1=R+e
После поворота ротора
O1O
e
e cos R e sin e cos R 1 ( sin ) 2
R
2
2
2
перемещение поршня при повороте ротора на угол φ
e
2
h ( R e) e(1 cos ) R 1 1 ( sin )
R
14.
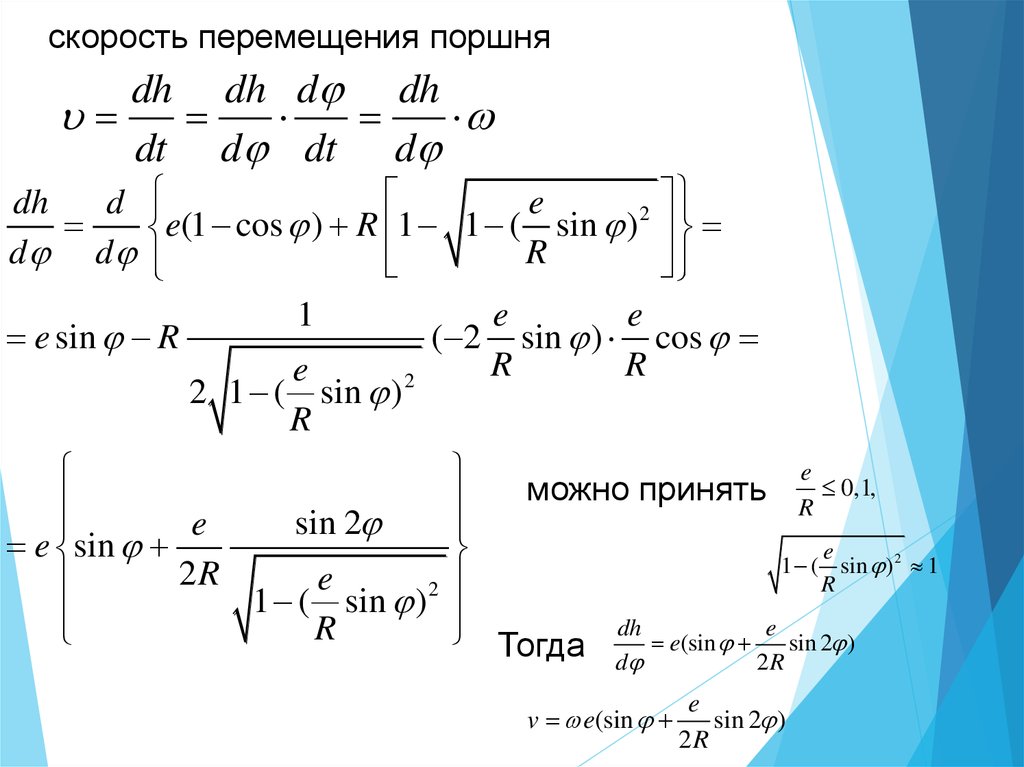
скорость перемещения поршняdh dh d dh
dt d dt d
dh
d
e
2
e(1 cos ) R 1 1 ( sin )
d d
R
1
e
e
e sin R
( 2 sin ) cos
R
R
e
2
2 1 ( sin )
R
sin 2
e
e sin
2R
e
1 ( sin ) 2
R
e
0,1,
можно
принять
R
e
1 ( sin )
R
dh
e
e
(sin
sin 2 )
Тогда d
2R
v e(sin
e
sin 2 )
2R
2
1
15.
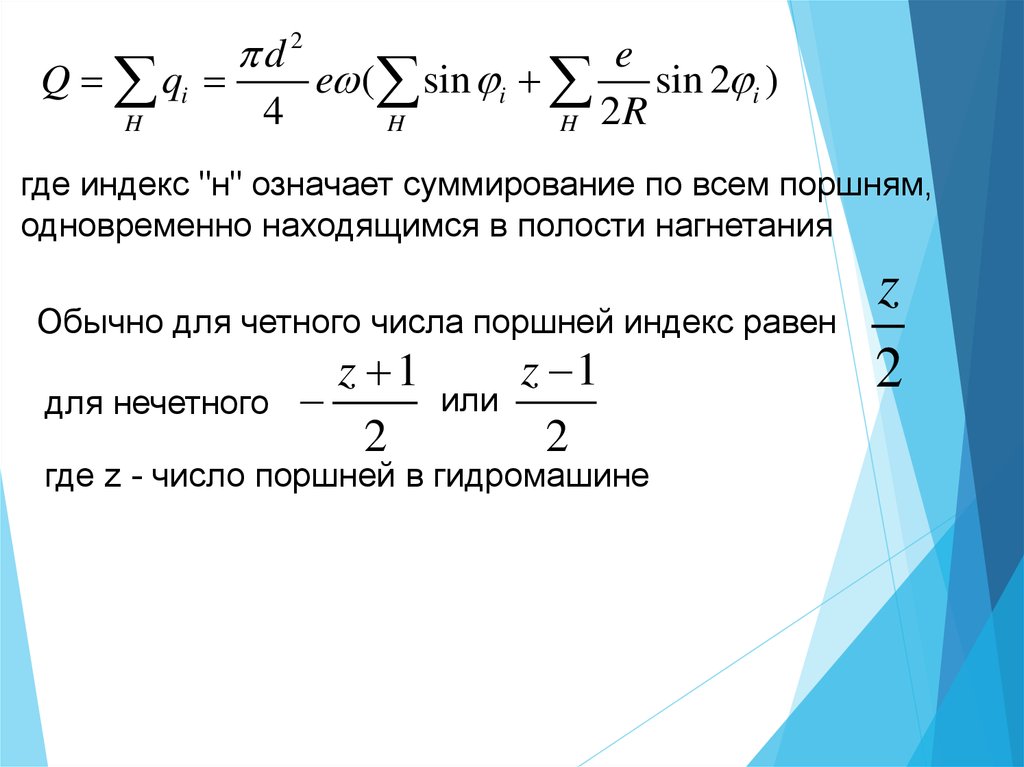
d2e
Q qi
e ( sin i
sin 2 i )
4
H
H
H 2R
где индекс "н" означает суммирование по всем поршням,
одновременно находящимся в полости нагнетания
Обычно для четного числа поршней индекс равен
для нечетного
z 1
2
или
z 1
2
где z - число поршней в гидромашине
z
2
16.
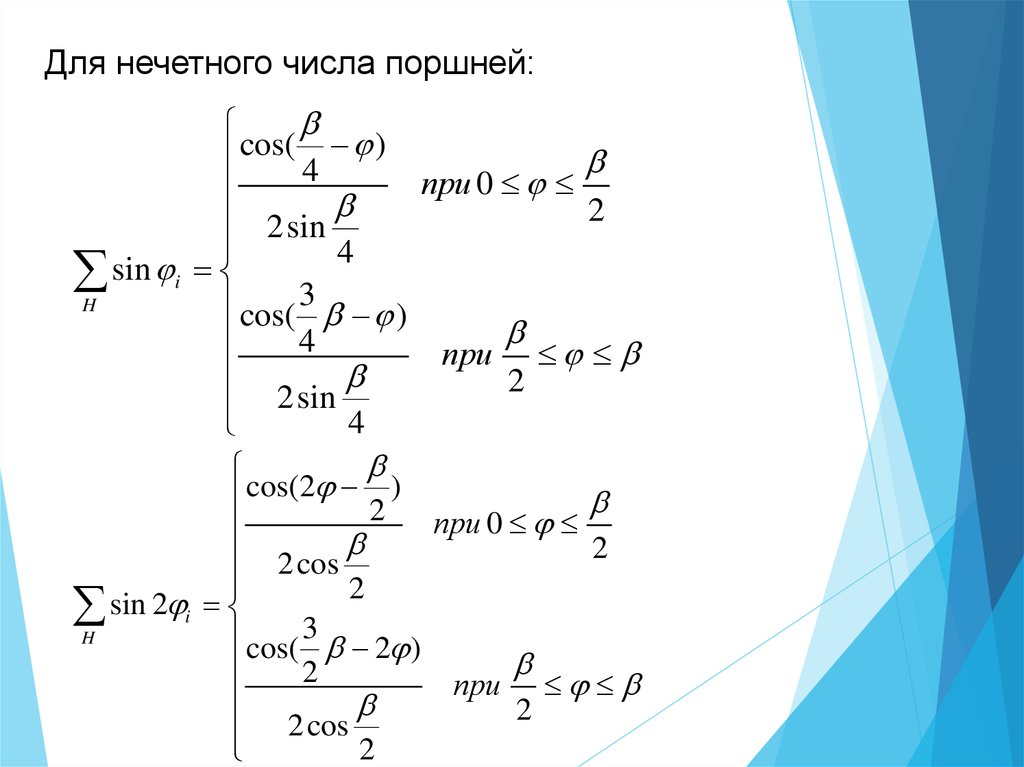
Для нечетного числа поршней:cos( 4 )
при 0
2
2sin
4
sin
i
H
cos( 3 )
4
при
2
2sin
4
cos(2 2 )
при
0
2
2 cos
2
sin
2
i
H
cos( 3 2 )
2
2 cos
2
при
2
17.
Для четного числа поршней:sin i
H
cos(
2
sin
sin 2
i
)
2
0
H
Коэффициент неравномерности подачи
Qmax Qmin
Qmax
2
2sin
2sin 2
2z
4z
, если z четное
, если z нечетное
18.
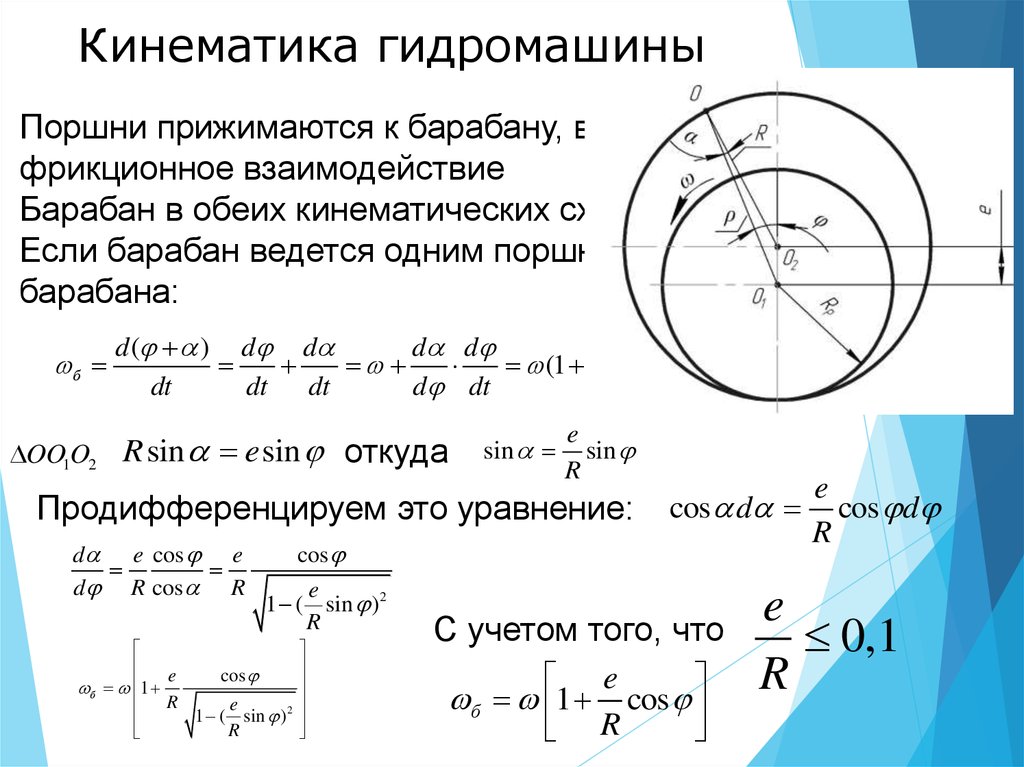
Кинематика гидромашиныПоршни прижимаются к барабану, вступая с ним во
фрикционное взаимодействие
Барабан в обеих кинематических схемах следует за ротором.
Если барабан ведется одним поршнем, то угловая скорость
барабана:
б
d ( ) d d
d d
d
(1
)
dt
dt dt
d dt
d
OO1O2 R sin e sin
откуда
sin
e
sin
R
Продифференцируем это уравнение:
d e cos e
d R cos R
cos d
cos
e
1 ( sin ) 2
R
e
cos
б 1
R
e
1 ( sin ) 2
R
С учетом того, что
e
б 1 cos
R
e
cos d
R
e
0,1
R
19.
Кинематика РПГ с цилиндрической направляющей ипринудительным ведением поршней
Угловая скорость вращения
ролика вокруг оси O определяется
рл
d d d d
dt d dt d
Поставив вместо
получим
d e cos e
d R cos R
cos
e
1 ( sin ) 2
R
e
cos
e
R
рл
cos
R
e
1 ( sin ) 2
R
Ролик относительно оси O
вращается в двух
противоположных направлениях
20.
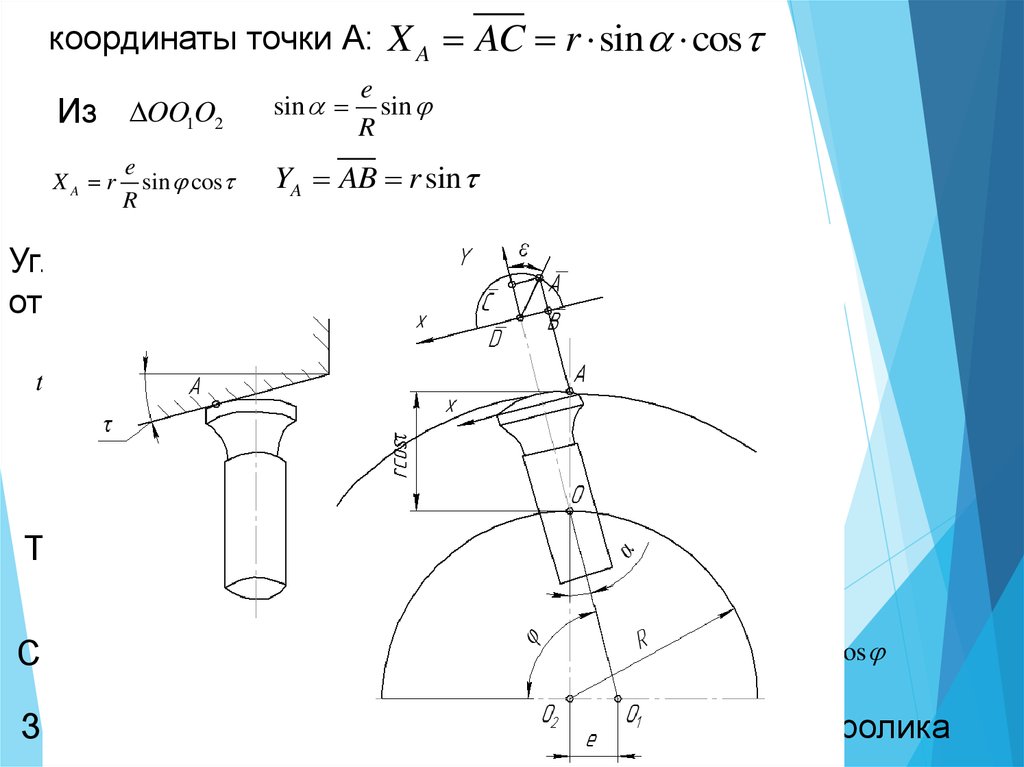
Кинематика РПГ с конической направляющей статораточка контакта сферической поверхности головки поршня
смещена относительно его центра, и при вращении ротора
поршень поворачивается вокруг собственной оси.
21.
Кинематика движения поршняА - точка контакта головки поршня с конической
направляющей;
- угол наклона конической направляющей
22.
координаты точки А: X A AC r sin cosИз OO1O2
XA r
e
sin cos
R
sin
e
sin
R
YA AB r sin
Угловая скорость поворота поршня
d
относительно собственной оси
п
dt
tg
d d d
d dt d
XA e
e
ctg sin arctg ctg sin
YA
R
R
Тогда
e
ctg cos
d
d
e
п
(arctg ctg sin ) R
e
d
d
R
1 ( ctg sin ) 2
R
С учетом того, что
e
0,1
R
можно записать п e ctg cos
R
Закономерность вращения поршня такая же, как и ролика
23.
Точка контакта должна располагаться на сферическойчасти головки поршня в достаточном удалении (не менее 1
мм) от границы сферы.
AD X A2 YA2 (r
e
cos sin ) 2 (r sin ) 2
R
Максимальное значение при
Чтобы точка с координатами
2
AD max r
e
x r cos
R
y r sin
принадлежала поршню, необходимо
откуда
d1
r
d1
e
( cos ) 2 sin 2
R
d1
( AD) max
2
5
e
( cos ) 2 sin 2
R
диаметр окружности контактов на сфере
24.
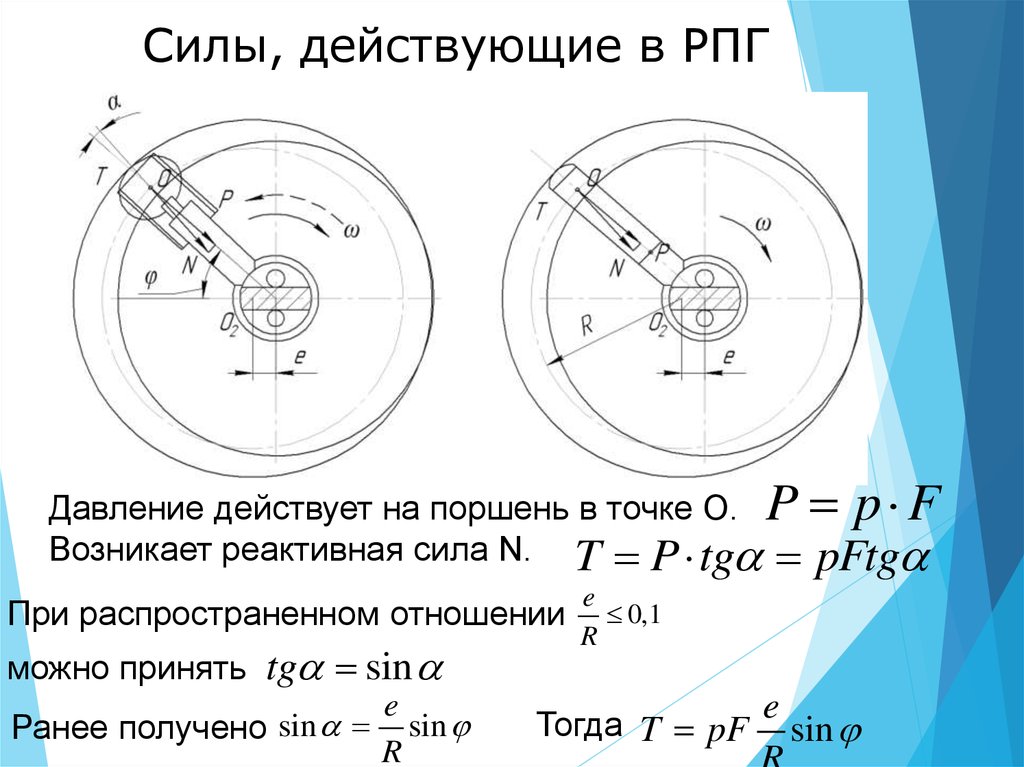
Силы, действующие в РПГДавление действует на поршень в точке O. P p F
Возникает реактивная сила N. T P tg pFtg
При распространенном отношении
можно принять tg sin
e
Ранее получено sin sin
R
e
0,1
R
Тогда T pF
e
sin
25.
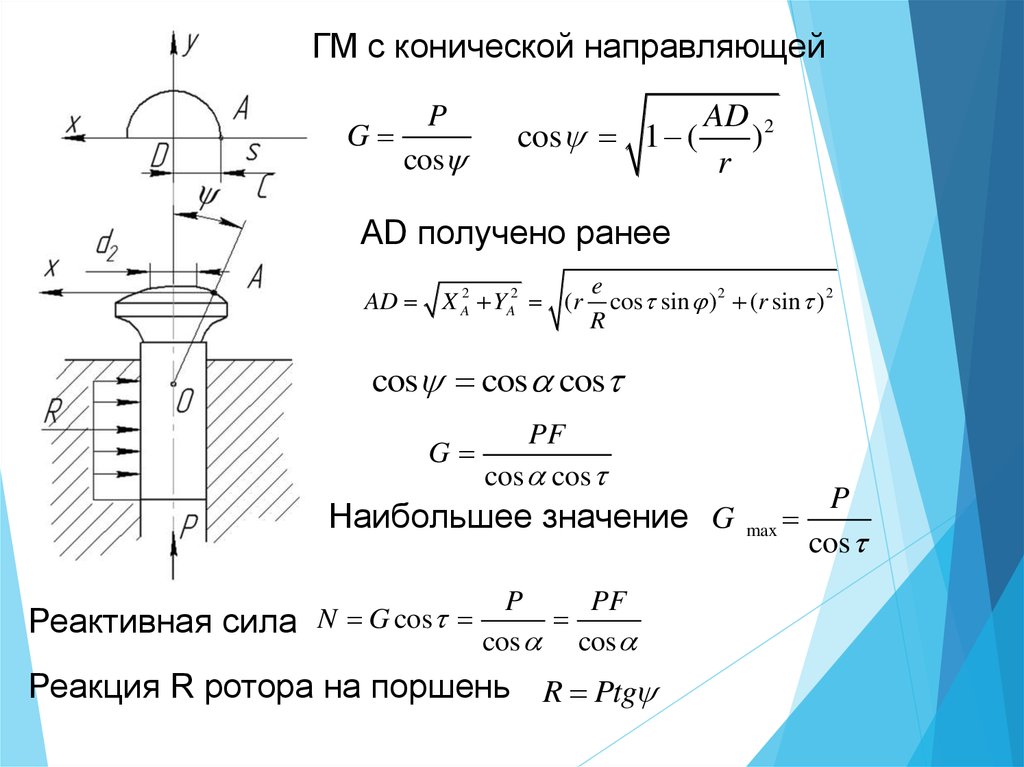
ГМ с конической направляющейG
P
cos
AD 2
cos 1 (
)
r
AD получено ранее
AD X A2 YA2 (r
e
cos sin ) 2 (r sin ) 2
R
cos cos cos
G
PF
cos cos
Наибольшее значение G
Реактивная сила N G cos
P
PF
cos cos
Реакция R ротора на поршень R Ptg
max
P
cos
26.
Сила Т является составляющей силы R и лежит вплоскости, перпендикулярной к оси ротора
T R sin Ptg sin
XA
arctg
arctg (ctg sin )
YA
1 cos 2
sin ctg
T p
cos
1 sin 2 ctg 2
Второй составляющей силы R будет сила Т0
направленная вдоль оси ротора
tg
T0 R cos Ptg cos P
cos
27.
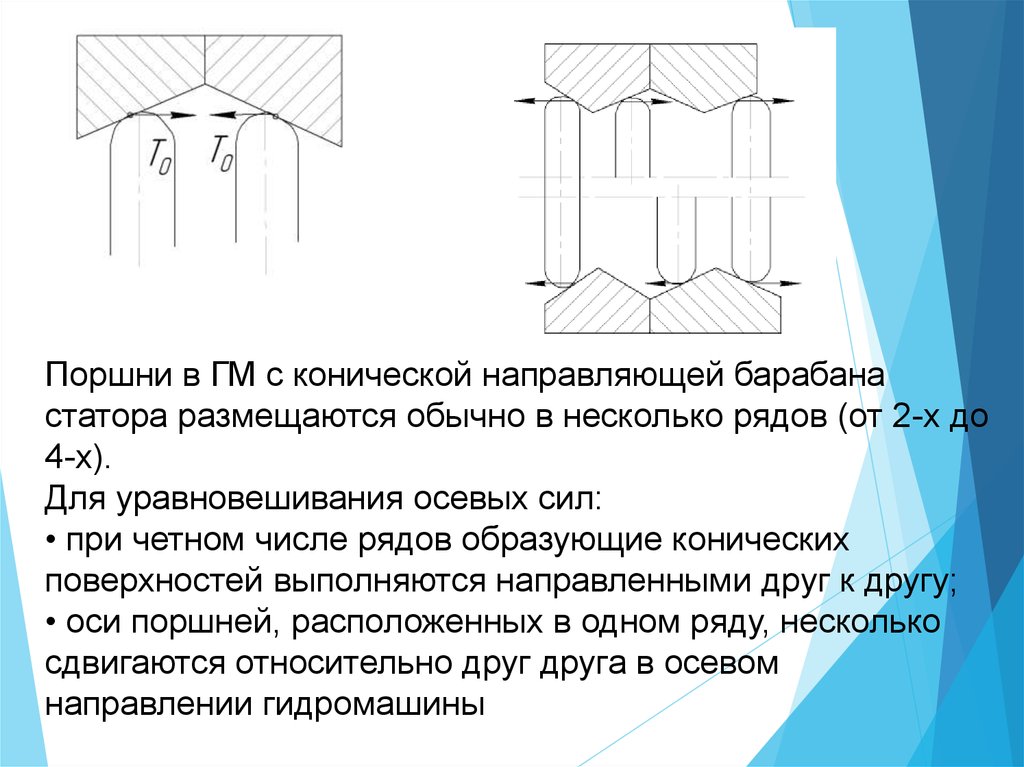
Поршни в ГМ с конической направляющей барабанастатора размещаются обычно в несколько рядов (от 2-х до
4-х).
Для уравновешивания осевых сил:
• при четном числе рядов образующие конических
поверхностей выполняются направленными друг к другу;
• оси поршней, расположенных в одном ряду, несколько
сдвигаются относительно друг друга в осевом
направлении гидромашины
28.
Гидромашины с цилиндрической направляющейРеакция N статорного кольца передается оси ползушки.
Составляющая Т реакции - это усилие, с которым ползун
воздействует на ротор.
Площадь опоры ползуна определяем из допустимого
напряжения смятия T
см
см
f
f
- площадь опоры ползуна
0,95МПа при нормальной нагрузке
1,3МПа при кратковременной перезагрузке
см
до 10% опорной поверхности ползуна занимают смазочные
канавки, необходимую площадь опоры ползуна определяют
f
T
0,9 см
29.
Напряжение в линии контакта ролика с цилиндрическойнаправляющей
NE 1
1
0,175
2b r1 r1 R
где N — реактивная сила N max
pF
cos max
Е - приведенный модуль упругости материалов ролика и
статорного кольца;
b, r - ширина и радиус ролика;
R - радиус расположения оси ролика;
При уточненных расчетах учитывают центробежную силу
I m rц
2
где m - масса поршня и сопряженных с ним частей
(ползушки, роликов, шайб, оси);
rц - радиус центра тяжести поршня и сопряженных с ним
частей
30.
Гидромашины с конической направляющейНапряжение в месте контакта головки
поршня с коническим кольцом
1 1
m 3 Gmax E 2
r Rk
2
где m - коэффициент, определяемый отношением
Rk r
Rk
G - наибольшее значение реакции конического кольца;
E - приведенный модуль упругости материалов поршня и
конического кольца
Rk
R
r
cos
- радиус кривизны конической поверхности
31.
Для насосов с конической направляющейвеличина центробежной силы должна быть
достаточной для преодоления действия
следующих сил:
• силы трения поршня в роторе;
• силы для разгона поршня;
• силы атмосферного давления на поршень,
возникающей в результате образования вакуума
под поршнем.
Поршень должен иметь массу достаточной
величины. Поэтому, диаметр поршня не должен
быть меньше 16 мм при n=1000 об/мин и 22 мм при n = 750 об/мин.
32.
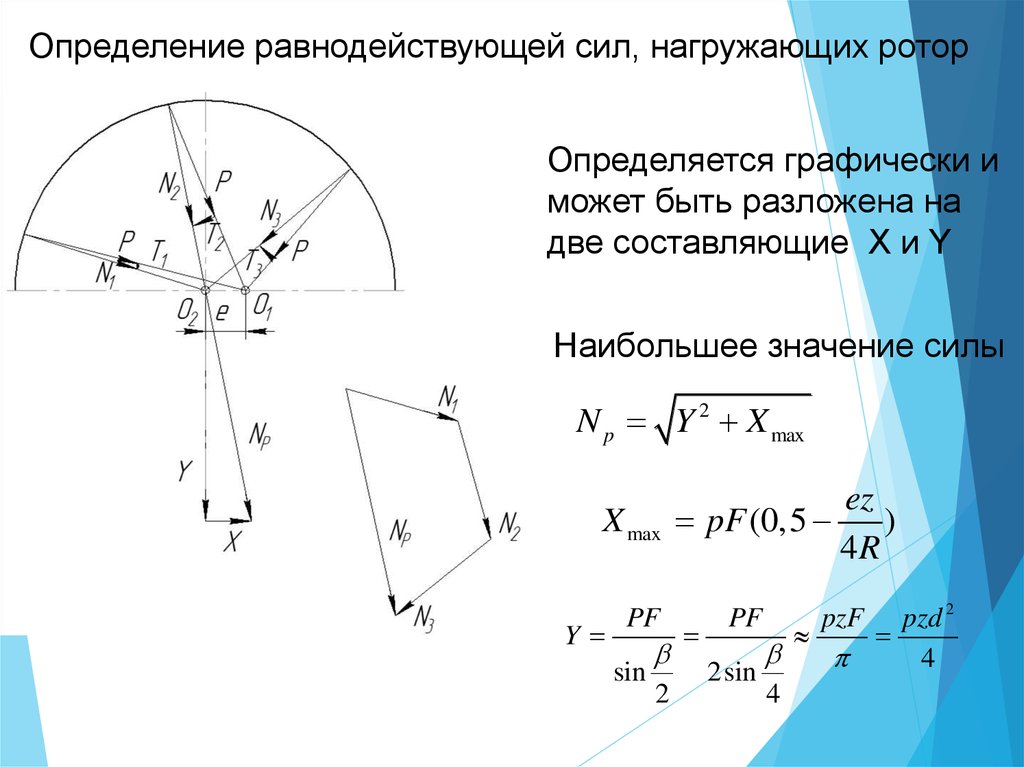
Определение равнодействующей сил, нагружающих роторОпределяется графически и
может быть разложена на
две составляющие X и Y
Наибольшее значение силы
N p Y 2 X max
X max
ez
pF (0,5
)
4R
pzd 2
Y
4
sin
2sin
2
4
PF
PF
pzF
33.
Цапфовые распределителиприменяются в большинстве конструкций радиальных машин
Диаметр зависит от площади просверленных отверстий,
которая, в свою очередь, зависит от расхода жидкости,
проходящей через машину.
• для самовсасывающих насосов скорость потока жидкости
=3...4 м/с
• в насосах, не рассчитанных на самовсасывание, и в
гидромоторах =6 м/с.
34.
Цапфа 1 выполняется цилиндрической или конической формыКонусная цапфа обеспечивает малый зазор между цапфой 1
и втулкой ротора 2.
Однако изготовление и замена изношенной втулки сложнее
35.
При проектировании распределительной оси необходимообеспечение четырех условий:
•напряжение на изгиб не должно выходить за допустимые
пределы, доп 80 120МПа
• прогиб цапфы должен быть в пределах допустимого во
избежание заедания пары цапфа - втулка ротора;
• скорости скольжения втулки ротора на
распределительной оси не должны превосходить
допустимых ( =3м/с - для регулируемых насосов и =4,5м/с
- для нерегулируемых гидромотором);
• ротор на распределительной оси должен находиться во
взвешенном состоянии (гидравлическое уравновешивание
обязательно).
36.
необходимо рассчитать прогиб в направлении оси YYl13
3EJ x
где Y - сила, нагружающая цапфу в направлении оси y;
E - модуль упругости материала цапфы;
d04
d c4 d c2 2
Jx
4
y
64
4
64
- момент инерции цапфы
относительно оси x
Во избежание недопустимого прогиба должно быть
соблюдено условие
l1
0, 0003
37.
Выводы• Как кинематически получилась РПГ?
• Схемы РПГ (pвс);
• Гидромашины работают в основном в режиме насоса. В
режиме гидромотора используются высокомоментные
гидромоторы, которые являются модификацией РПГ;
• Для получения большого момента без существенного
увеличения габаритов, давления и числа поршней следует
увеличить кратность действия поршней.
• Четное число кратности действия позволяет устранить
радиальные силы давления блока цилиндров на подшипники
38.
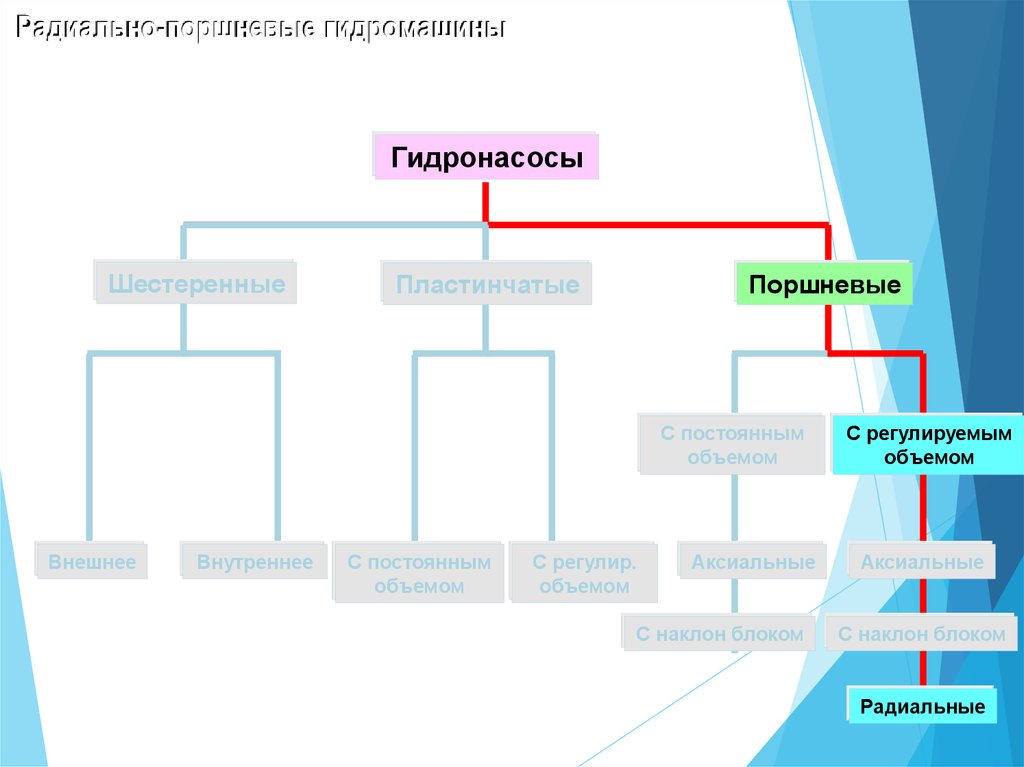
Радиально-поршневые гидромашиныГидронасосы
Шестеренные
Пластинчатые
Поршневые
С постоянным
объемом
Внешнее
Внутреннее
С постоянным
объемом
С регулир.
объемом
Аксиальные
С наклон блоком
С регулируемым
объемом
Аксиальные
С наклон блоком
Радиальные
39.
Радиально-поршневой насос с регулируемым объемом40.
Характеристики Радиальных насосовu Рабочий объем до 250 см3
u Давление до 350 бар
u Регулируется
u Высокий КПД
u Высокая продолжительность
работы
u Малые габариты
u Высокая стоимость
41.
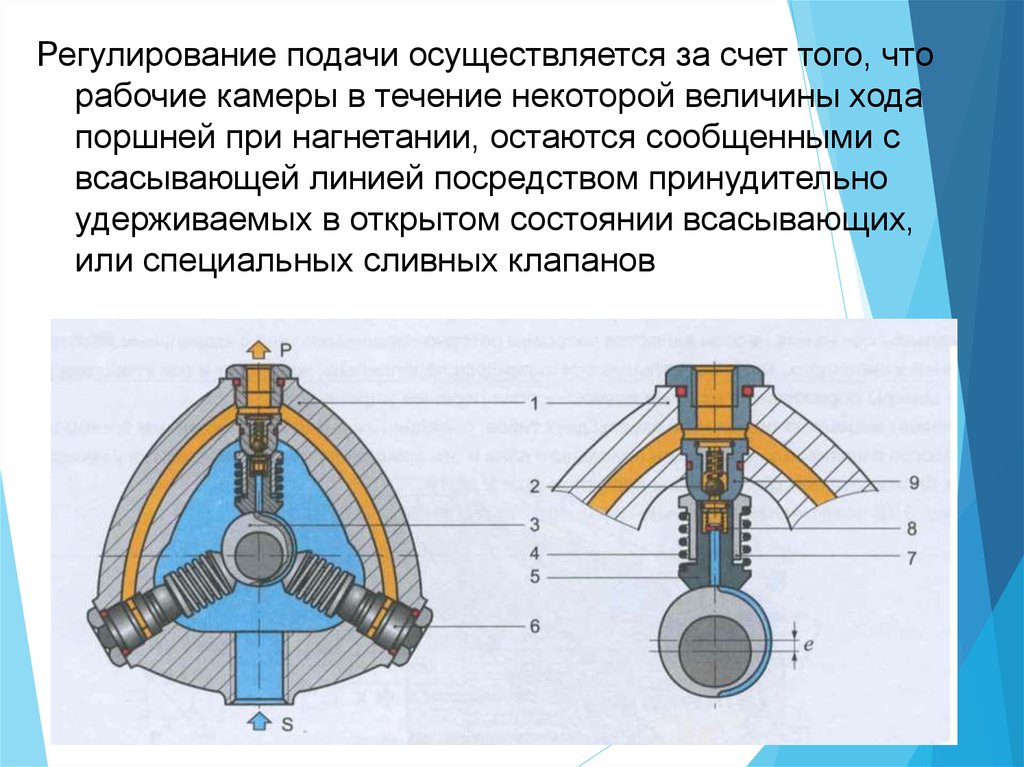
Регулирование подачи осуществляется за счет того, чторабочие камеры в течение некоторой величины хода
поршней при нагнетании, остаются сообщенными с
всасывающей линией посредством принудительно
удерживаемых в открытом состоянии всасывающих,
или специальных сливных клапанов