






 для диэлектрических жидкостей; б) для проводящих жидкостей; в) зависимость емкости от")






















")

 расходомеры")
 Физика
ФизикаПохожие презентации:
")
")



. Теорема об изменении момента количества движения системы")




Датчики. Датчики крутящего момента. Датчики уровня
1. Часть 3
Датчики2. Датчики крутящего момента
Первый способ определения крутящего момента ― измерениенапряжений на поверхности вала
Приложение к валу крутящего момента
Для сплошного вала
Для полого вала
н
н
Нормальные напряжения
16М кр
d3
16 M кр
d 04
d 1 4
d
3
3.
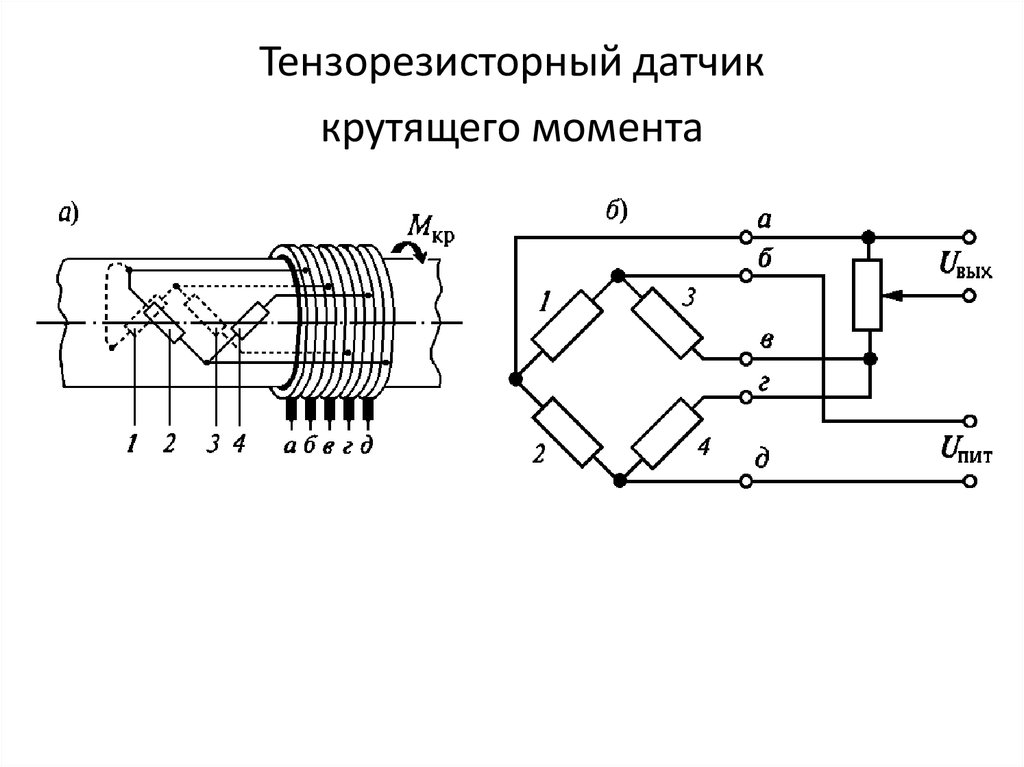
Тензорезисторный датчиккрутящего момента
4. Телеметрический тензорезисторный датчик
5. Второй способ. Измерение угла закручивания
Для сплошного вала32 l M кр
d G
4
,
где G – модуль сдвига
Для полого вала
32 l M кр
(d 4 d 04 )G
6.
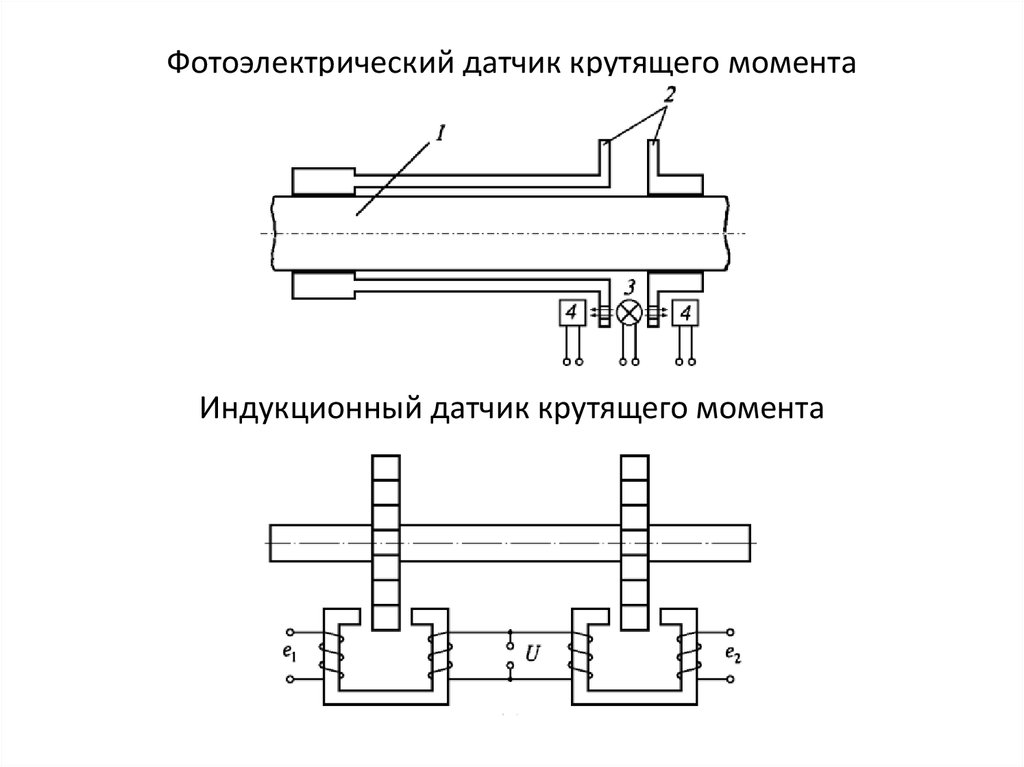
Фотоэлектрический датчик крутящего моментаИндукционный датчик крутящего момента
7. Датчики уровня
Дифференциально-трансформаторныйпоплавковый датчик уровня
8. Индуктивный поплавковый датчик уровня
9. Электромеханический поплавковый датчик уровня
Мембранныйдатчик уровня
10. Емкостной цилиндрический датчик уровня а) для диэлектрических жидкостей; б) для проводящих жидкостей; в) зависимость емкости от
уровняC C1 C2
2 0 ( H h) 2 0 r h
2 0
H h( r 1)
D
D
D
ln
ln ln
d
d
d
11. Поплавковый сигнализатор уровня рычажного типа
Принцип действияВнешний вид сигнализатора
«Mobrey»
12. Устройство сигнализатора «Mobrey»
13. Омический датчик уровня проводящей жидкости
14. Сельсины
Сельсин − специальная электрическая машина переменноготока, предназначенная для дистанционной синхронной передачи
угла поворота или вращения.
Обмотка возбуждения: однофазная или трехфазная.
Обмотка синхронизации: трехфазная.
Режимы работы сельсина:
индикаторный: датчик поворачивается принудительно, а
приемник устанавливается в согласованное с датчиком
положение под воздействием собственного
синхронизирующего момента;
трансформаторный: датчик поворачивается принудительно, а
приемник вырабатывает напряжение, являющееся функцией
угла рассогласования между датчиком и приемником.
15.
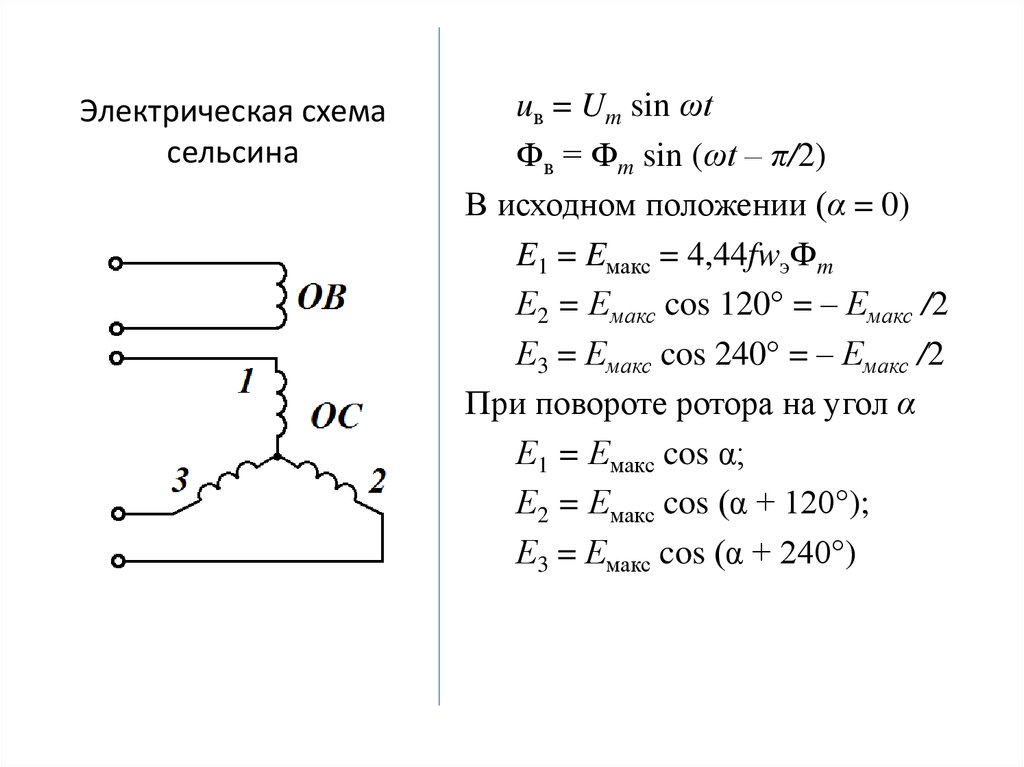
Электрическая схемасельсина
uв = Um sin ωt
Фв = Фm sin (ωt – π/2)
В исходном положении (α = 0)
E1 = Eмакс = 4,44fwэФm
Е2 = Емакс cos 120° = – Емакс /2
Е3 = Емакс cos 240° = – Емакс /2
При повороте ротора на угол α
Е1 = Емакс cos α;
Е2 = Емакс cos (α + 120°);
Е3 = Емакс cos (α + 240°)
16. Бесконтактный сельсин
17. Индикаторный режим работы сельсина
Схема соединениясельсинов
ЭДС датчика
Ед1 = Емакс cos αд;
Ед2 = Емакс cos (αд + 120°);
Ед3 = Емакс cos (αд + 240°)
ЭДС приемника
Еп1 = Емакс cos αп;
Еп2 = Емакс cos (αп + 120°);
Еп3 = Емакс cos (αп + 240°)
Результирующие ЭДС фаз
д п
E1 2 Емакс sin
2
sin ;
2
п
E2 2 Емакс sin д
120 sin ;
2
2
п
E3 2 Емакс sin д
240 sin .
2
2
18. Определение токов
Уравнения для контуров токовU0п = Е1д – Е1п +I1 2Z;
U0п = Е2д – Е2п +I2 2Z;
U0п = Е3д – Е3п +I3 2Z,
Сумма уравнений
3U0п = Е1д + Е2д + Е3д – (Е1п + Е2п + Е3п) + (I1 + I2+ I3) 2Z.
Вывод: потенциал нейтрали приемника U0п = 0
Токи:
E
д п
I1
I макс sin
sin ;
2Z
2
2
E
п
I 2 2 I макс sin д
120 sin ;
2Z
2
2
1
E3
д п
I3
I макс sin
240 sin .
2Z
2
2
19. Разложение МДС на составляющие
МДС фазыFф
4 2
wэ I ф 1,8wэ I ф
Продольная составляющая
МДС приемника
Fd п Fп1 cos п Fп 2 cos( п 120 ) Fп 3 cos( п 120 )
1,8wэ I1 cos п I 2 cos( п 120 ) I 3 cos( п 120 ) 1,8wэ I d п
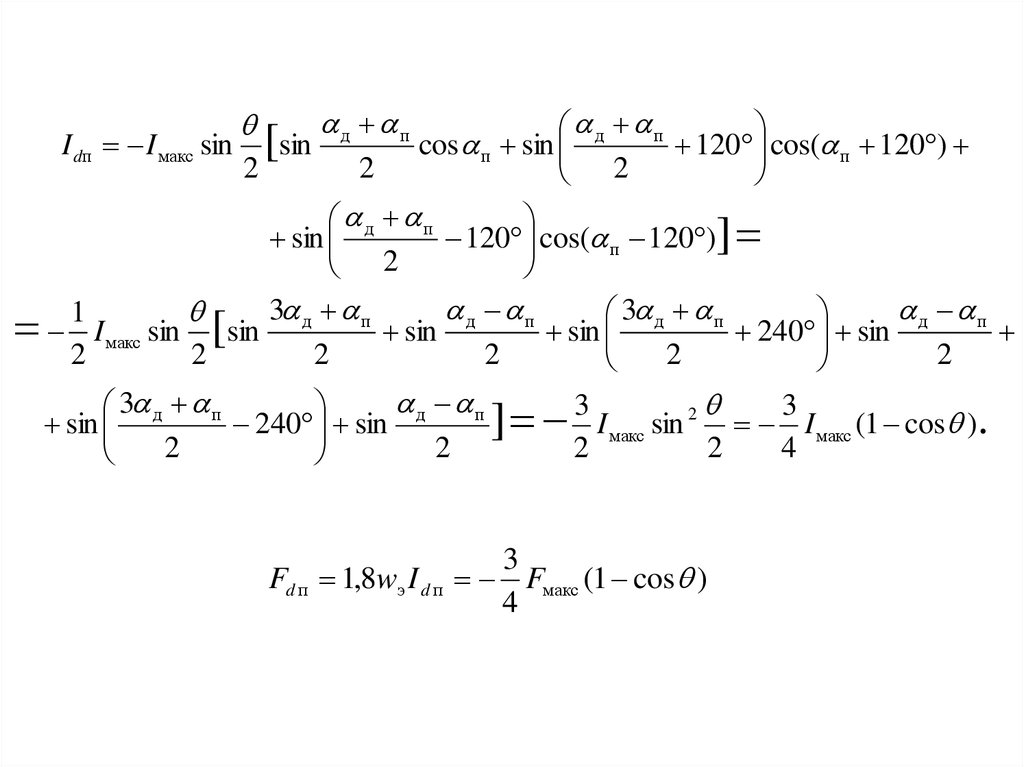
20.
I dп I макс sin2
[sin
д п
2
д п
cos п sin
120 cos( п 120 )
2
п
sin д
120 cos( п 120 )]
2
1 I макс sin [sin 3 д п sin д п sin 3 д п 240 sin д п
2
2
2
2
2
2
д п
3
3
3 д п
2
sin
240 sin
] I макс sin I макс (1 cos ).
2
2
2
2
4
Fd п 1,8wэ I d п
3
Fмакс (1 cos )
4
21.
Поперечная составляющая МДСFq п Fп1 sin п Fп 2 sin( п 120 ) Fп 3 sin( п 120 )
1,8wэ I1 sin п I 2 sin( п 120 ) I 3 sin( п 120 ) 1,8wэ I q п .
I qп I макс sin
2
[sin
д п
2
д п
sin п sin
120 sin( п 120 )
2
д п
sin
120 sin( п 120 )]
2
д п
д 3 п
д п
1
д 3 п
I макс sin [cos
cos
cos
cos
240
2
2
2
2
2
2
cos
д п
2
3
3
д 3 п
cos
240 ] I макс sin cos I макс sin .
2
2
2
2
4
3
Fq п 1,8wэ I q п Fмакс sin .
4
22. Определение синхронизирующего момента
Мгновенное значение синхронизирующего моментаmс.п = с Фв fqп
где с − конструктивная постоянная;
Фв – мгновенное значение потока обмотки возбуждения;
3
f qп 2 Fмакс sin sin t .
2
3
Тогда mс.п сФ m sin t 2 Fмакс sin sin t
2 4
2
3
1
сФ m 2 Fмакс sin cos cos( 2 t ) .
4
2
4
Среднее значение синхронизирующего момента
М с сФ m
3
2 Fмакс cos sin M m sin .
8
23. Трансформаторный режим работы
Токи фаз:E1
I1
I макс cos д ;
2Z
E
I 2 2 I макс cos д 120 ;
2Z
E
I 3 3 I макс cos д 120 .
2Z
Продольная составляющая МДС:
Поперечная составляющая МДС:
Выходная ЭДС:
3
Fd п Fмакс cos .
2
3
Fq п Fмакс sin .
2
Eвых Eвых.макс cos .
Выходная ЭДС с учетом сдвига:
Eвых Eвых.макс sin .
24. Следящая система с сельсинами в трансформаторном режиме
25. Вращающиеся трансформаторы
Вращающийся трансформатор (ВТ) −электрическая микромашина переменного тока,
служащая для преобразования угла поворота
ротора в напряжение. В зависимости от закона
изменения выходного напряжения ВТ
подразделяются на следующие типы:
• синусно-косинусные ВТ (СКВТ): два выходных
напряжения, одно из которых
пропорционально синусу угла поворота
ротора, а другое – косинусу угла;
• линейные ВТ (ЛВТ): выходное напряжение
изменяется по закону, близкому к линейному,
в определенном диапазоне изменения угла;
• масштабные ВТ: выходное напряжение
изменяется пропорционально входному, а
коэффициент пропорциональности
определяется углом поворота ротора.
Схема ВТ:
26. Синусно-косинусный ВТ
Работа СКВТ при холостом ходеЕв = 4,44 f wс.э Фdm
Еs0 = 4,44 f wp.э Фdm sin α
Еc0 = 4,44 f wp.э Фdm cos α
Es0 = kEв sin α; Ec0 = kEв cos α,
где k = wр.э /wс.э − коэффициент
трансформации СКВТ.
Работа СКВТ при нагрузке
I s
E s
Z s Z нs
F s 2 I s wр.э
27. Работа СКВТ при нагрузке
Разложение МДСсинусной обмотки
по осям
Поперечная составляющая потока
F s cos
sqm
Rм
ЭДС самоиндукции синусной обмотки
F
E sq 4,44 f wр.э sqm cos 4,44 f wр.э s cos 2
Rм
Выражая F через I, а I через Es, получаем:
cos 2
E
E sq jxs s
Z s Z нs
Полная ЭДС синусной обмотки
cos 2
E
E s kE в sin jxs s
Z s Z нs
Отсюда находим ЭДС синусной обмотки:
Fsd Fs sin ; Fsq Fs cos .
kE в sin
Es
cos 2
1 jxs
Z s Z нs
28.
Линейный ВТИспользование зависимости sin α α
α, °
1
2
4,5
7
δ, %
0,005
0,02
0,1
0,25
Аппроксимация зависимостью
При -60° < α < 60°
f ( )
ЛВТ с первичным
симметрированием
sin
1 k cos
k = 0,536.
Напряжение сети
U в E в E c 4,44 f wc.э dm 4,44 f wр.э dm cos
Отсюда магнитный поток
dm
U в
4,44 f ( wc.э wр.э cos )
ЭДС синусной обмотки
wр.эU в sin
F s 2 I s wр.э
sin
k
U
в
E s 4,44 f wр.э dm sin
wc.э wр.э cos
1 k cos
29. Датчики давления
Упругие чувствительные элементы:а) мембрана; б) мембранная коробка;
в) сильфон; г) трубка Бурдона
30. Примеры датчиков давления
а) с потенциометрическим преобразователем;б) с индуктивным преобразователем;
в) дифференциальный датчик давления.
31. Электроконтактный манометр
32. Датчики расхода
Расход – объем или масса вещества, проходящие черезопределенное сечение в единицу времени.
Датчики расхода делятся на расходомеры и счетчики.
Наибольшее применение нашли:
расходомеры переменного и постоянного перепада
давления;
• объемные счетчики и расходомеры;
• тахометрические расходомеры ;
• электромагнитные (индукционные) расходомеры.
33. Расходомеры переменного перепада давления
Уравнение Бернуллиp1 w12 p2 w22
2
2
Уравнение неразрывности струи
F1w1 = F2w2
F2 = μF0
Из (1 – 3) получаем
w2
1
2
1 m
2
2
(1)
(2)
(3)
( p1 p2 ) ,
где m = F0/F1.
При измерении давления у диафрагмы
w2
2
1 m
2
2
( p1 p2 )
34.
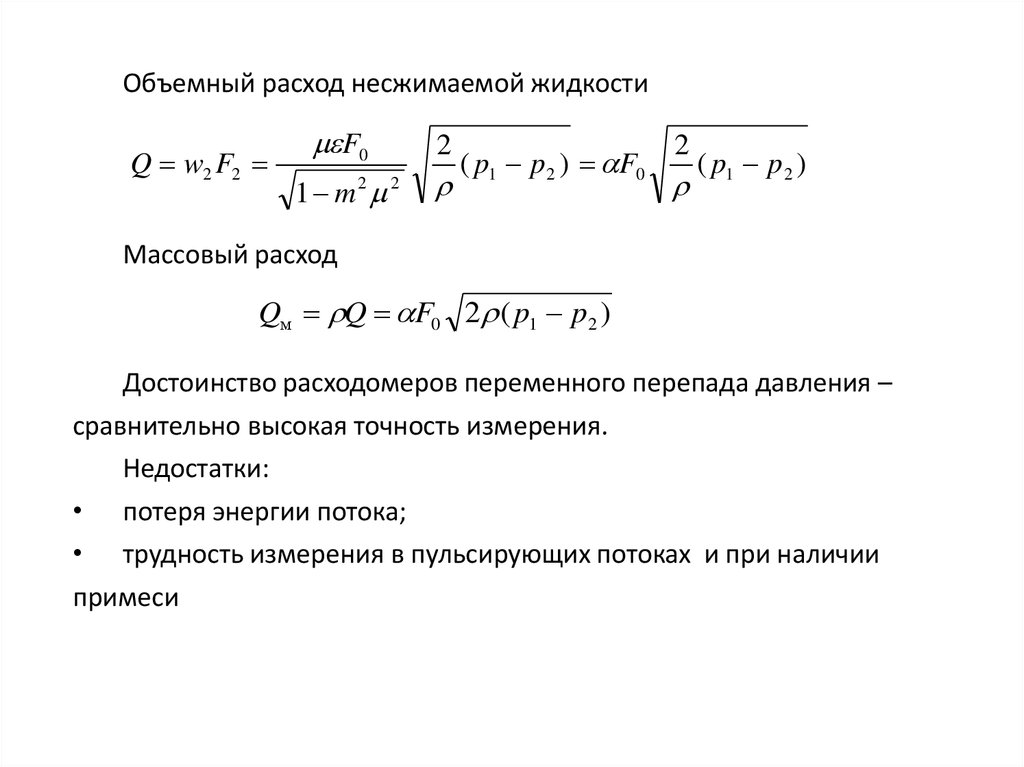
Объемный расход несжимаемой жидкостиQ w2 F2
F0
1 m
2
2
2
( p1 p 2 ) F0
2
( p1 p 2 )
Массовый расход
Qм Q F0 2 ( p1 p2 )
Достоинство расходомеров переменного перепада давления –
сравнительно высокая точность измерения.
Недостатки:
• потеря энергии потока;
• трудность измерения в пульсирующих потоках и при наличии
примеси
35. Расходомеры постоянного перепада давления
Сила тяжести поплавкаP = Vп g (ρп – ρ)
Подъемная сила
R = (p1 – р2)F0
В установившемся режиме P = R, поэтому
Vп g ( п )
p1 p2 p
F0
2
w
( p1 p2 ),
Скорость протекания жидкости
откуда
w2
p
2
Приравнивая два выражения для Δр, получаем:
Объемный расход
w
2Vп g ( п )
F0
Q = αwFк.
Так как практически w = const, то Q пропорционально высоте подъема поплавка
36. Объемные счетчики (расходомеры)
Счетчик с овальными шестернямиЛопастной счетчик
37. Тахометрические расходомеры
Угловая скорость крыльчаткиQ
сw c
F
38. Электромагнитные (индукционные) расходомеры
ЭДС между электродами при постоянном магнитном потоке4
Q.
d
При переменном магнитном потоке
4
e Bm
Q sin t.
d
e Bdw B