


























 – английский физик, один из первооткрывателей закона сохранения энергии.")





 Физика
ФизикаПохожие презентации:




")





Работа и энергия. Механическая работа. Мощность
1. Физические основы механики
Семестр 12. Работа и энергия
3. ЛЕКЦИЯ № 4.
1. Механическая работа. Мощность.2. Кинетическая энергия частицы.
2.1. Теорема о кинетической энергии.
2.2. Теорема Кёнига.
3. Консервативные, неконсервативные и
гироскопические силы.
4. Потенциальная энергия.
5. Связь между потенциальной энергией и силой.
6. Закон сохранения механической энергии.
7. Общефизический закон сохранения энергии.
4. Механическая работа. Мощность.
Изменение механического движения тела вызываетсясилами, которые действуют на него со стороны других тел.
Чтобы количественно охарактеризовать процесс обмена
энергии между взаимодействующими телами, в механике
вводится понятие работы силы.
Если тело движется прямолинейно и на него действует
постоянная сила F , которая составляет некоторый угол
с направлением перемещения, то работа этой силы равна
Fs F cos
произведению проекции силы Fs
на перемещение точки приложения силы S :
A Fs S F S cos F S
5.
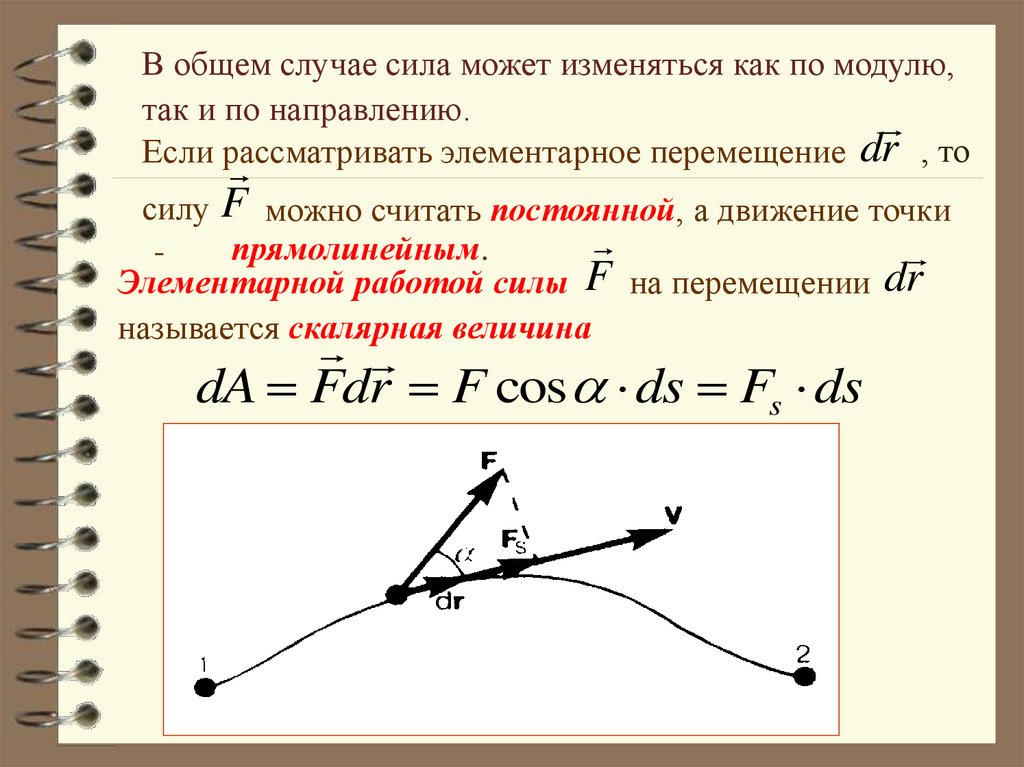
В общем случае сила может изменяться как по модулю,так и по направлению.
Если рассматривать
элементарное перемещение dr , то
силу F можно считать постоянной, а движение точки
прямолинейным.
Элементарной работой силы F на перемещении dr
называется скалярная величина
dA Fdr F cos ds Fs ds
6.
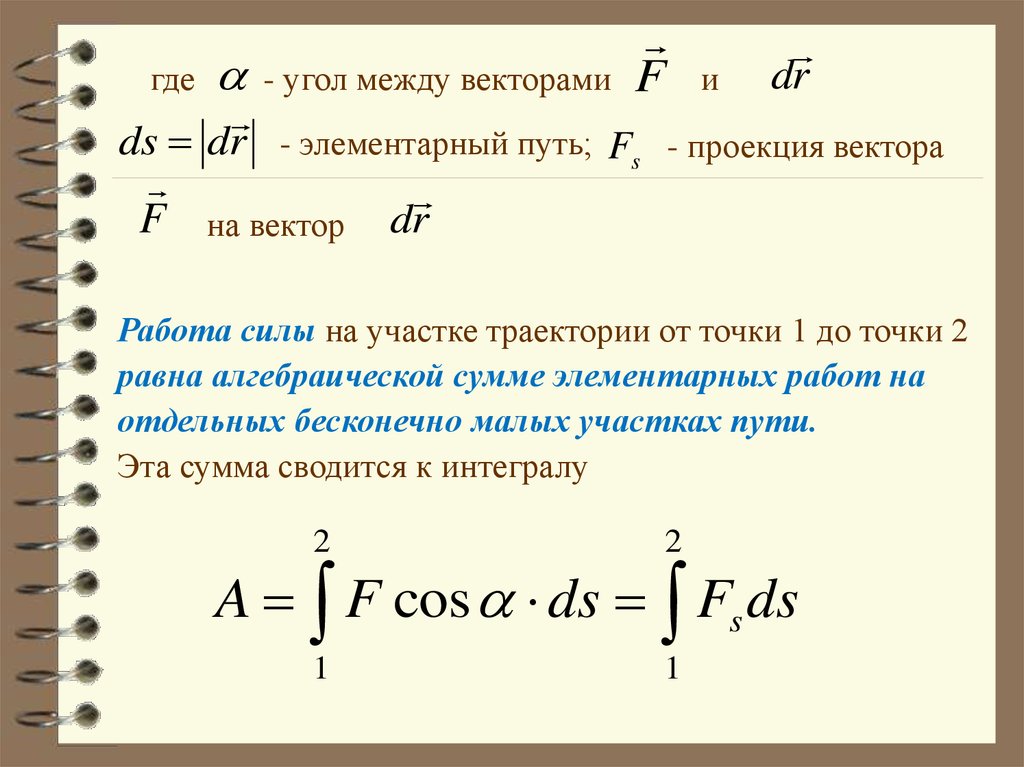
где- угол между векторами
F
и
dr
ds dr - элементарный путь; Fs - проекция вектора
F на вектор dr
Работа силы на участке траектории от точки 1 до точки 2
равна алгебраической сумме элементарных работ на
отдельных бесконечно малых участках пути.
Эта сумма сводится к интегралу
2
2
1
1
A F cos ds Fs ds
7.
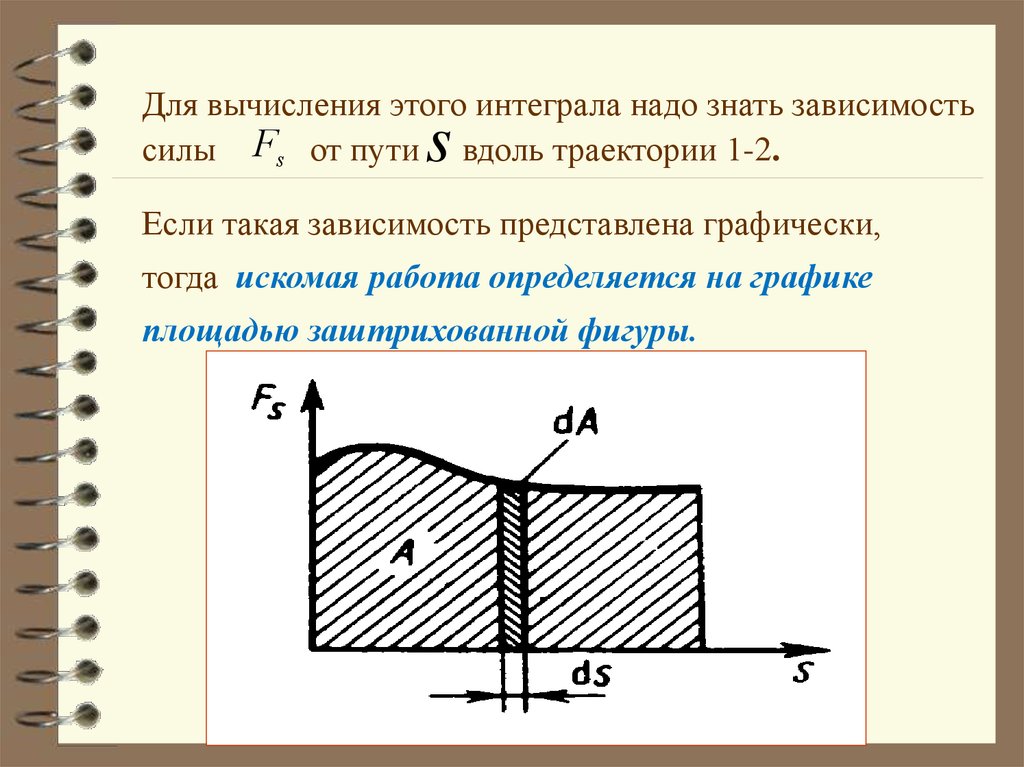
Для вычисления этого интеграла надо знать зависимостьсилы Fs от пути вдоль траектории 1-2.
s
Если такая зависимость представлена графически,
тогда искомая работа определяется на графике
площадью заштрихованной фигуры.
8.
Если, например, тело движется прямолинейно, силаF const
и
const
то получается совсем элементарно:
2
2
1
1
A F cos ds F cos ds F S cos
где
s - пройденный телом путь.
9.
Как следует из определения работы при1)
2)
2
2
работа силы положительна. В этом случае
составляющая Fs совпадает по направлению
с вектором скорости движения v
работа силы отрицательна.
работа силы равна нулю,
т.к. сила направлена
3)
2 перпендикулярно перемещению.
Единица работы – Джоуль ( Дж ).
10.
Чтобы охарактеризовать скорость совершения работы,dA
вводят понятие мощности
N
dt
F
Fdr , и
За время dt сила
совершает работу
мощность, развиваемая этой силой, в данный момент
времени
F dr
N
F v
dt
т.е. равна скалярному произведению вектора силы на
вектор скорости, с которой движется точка приложения
этой силы.
N
- величина скалярная.
Единица мощности – Ватт ( Вт ).
11. Примеры вычисления работы
Пример 1. Рассмотрим в качестве примера работу,совершаемую при деформации пружины.
В случае упругой деформации пружины F Fx k x,
x
l0
0
где
x
F
F
приложенная внешняя сила,
x деформация пружины.
Сила упругости пропорциональна деформации
Fупр
F
x
Fупр F kx
12.
где Fупр - проекция силы упругости на осьk
x;
- коэффициент упругости (для пружины –
жесткость), а знак минус указывает, что
направлена она в сторону, противоположную
деформации.
Элементарная работа dA , совершаемая силой Fx при
бесконечно малой деформации dx , равна
dA Fx dx k x dx
Полная работа внешней силы
x
Fx
2
kx
A kxdx
2
0
13. Кинетическая энергия частицы.
Кинетическая энергия механической системы – этоэнергия механического движения этой системы.
Имеем покоящееся тело. На него действует сила F , под
действием которой тело начинает двигаться.
При этом сила совершает работу, а энергия движущегося
тела возрастает на величину затраченной работы.
Работа dA силы F на пути, который тело прошло за
время возрастания скорости от 0 до V , идет на
увеличение кинетической энергии. Покажем это.
14.
Работа силы на конечном перемещении:A1 2
F
dA
F
d
S
2
2
1
Элементарная работа системы сил: F F1 F2 ... Fn
1
dA F dA1 dA2 ... dAn
Работа системы сил: A1 2
A1 2
F
n
F A1 2 Fi
i 1
FdS
1
1
2
2
dp
Vdt.
dt
то есть:
15.
A1 2Здесь
2
2
dp .
F FdS
Vdt
dt
1
1
dS Vdt ;
dp
F
dt
или
d
d
dV
F p
mV m
dt
dt
dt
Полная работа определяется следующим выражением:
A1 2
V2
2
2
2
mV2 mV1
F m VdV m VdV
2
2
1
V1
2
Здесь
mV
K Екин кинетическая энергия
2
16.
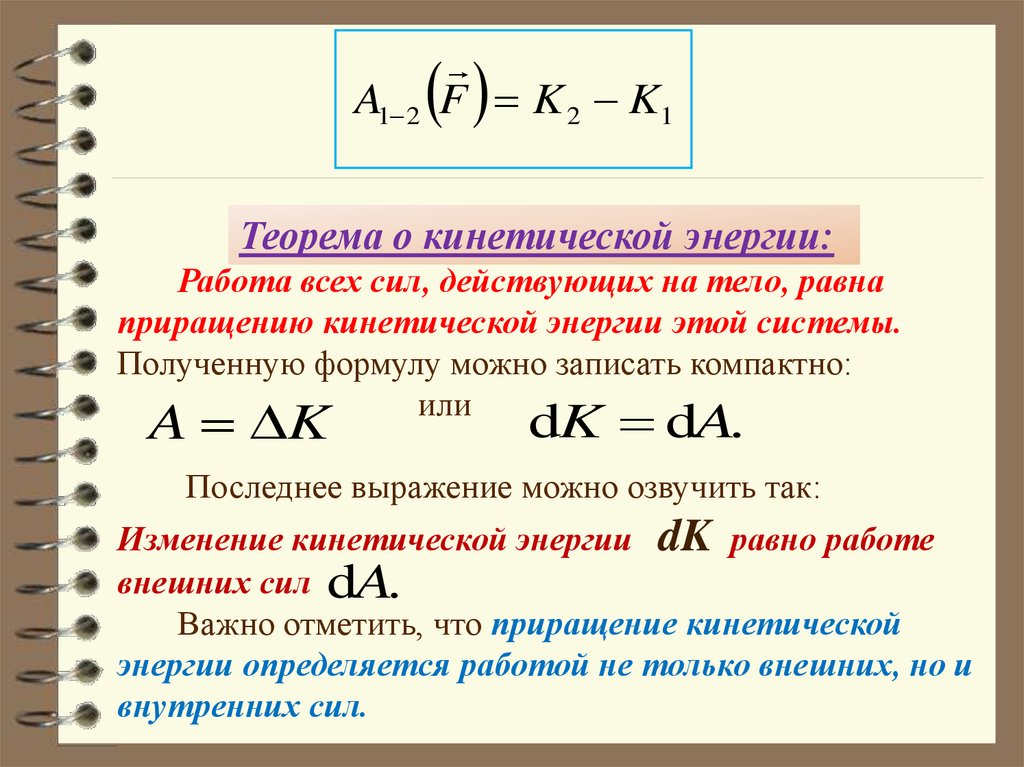
A1 2F K 2 K1
Теорема о кинетической энергии:
Работа всех сил, действующих на тело, равна
приращению кинетической энергии этой системы.
Полученную формулу можно записать компактно:
или
A K
dK dA.
Последнее выражение можно озвучить так:
Изменение кинетической энергии dK равно работе
внешних сил dA.
Важно отметить, что приращение кинетической
энергии определяется работой не только внешних, но и
внутренних сил.
17.
Связь кинетической энергии с импульсом p.Т.к.
m m m
,
2 m 2m
2
2
2
отсюда
p m
Екин K
2m 2
2
2
18.
Энергия измеряется в СИ в единицахпроизведения силы на расстояние, т.е.
в ньютонах на метр: 1 Н м 1Дж
Кроме того, в качестве единицы
измерения
энергии
используется
внесистемная единица – электронвольт (эВ): 1 эВ = 1,6 ∙10 ̄ 19 Дж.
19.
Кинетическая энергия зависит от массы и скороститела . Говорят : кинетическая энергия системы
есть функция состояния движения.
В разных инерциальных системах отсчета,
движущихся относительно друг друга, скорость
тела, а ,следовательно, и его кинетическая энергия
будут неодинаковы.
Таким образом, кинетическая энергия зависит от выбора системы отсчета.
20. Теорема Кёнига
Система S инерциальная, S тоже инерциальнаясистема, движущаяся относительно первой
поступательно с постоянной скоростью V0 .
Z’
.
V0
0
S
S
Y’
Y
X’
X
0’
V
М
Z
21.
Нерелятивистскийзакон
сложения
скоростей: V V V
0
V V V 2V V0
2
2
2
0
mV 2 mV 2 mV02
mV V0
2
2
2
mV02
K K'
p'V0
2
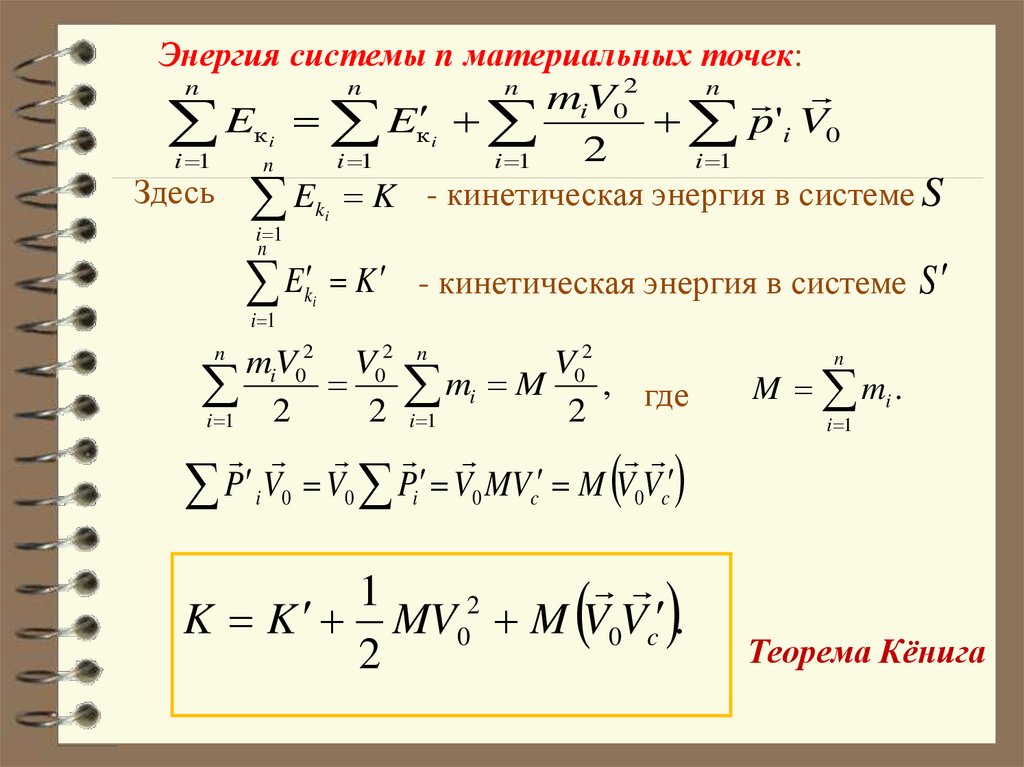
Энергия системы n материальных точек:
miV02 n
Eкi Eк i
p'i V0
2
i 1
i 1
i 1
i 1
n
n
n
22.
Энергия системы n материальных точек:n
E
кi
i 1
n
miV02
Eк i
p'i V0
2
i 1
i 1
i 1
n
n
E
Здесь
i 1
n
E
i 1
ki
ki
K - кинетическая энергия в системе S
K - кинетическая энергия в системе S
miV02 V02
2
2
i 1
n
n
V02
mi M
, где
2
i 1
n
n
M mi .
i 1
P i V0 V0 Pi V0 MVc M V0Vc
1
2
K K MV0 M V0Vc .
2
Теорема Кёнига
23.
В системе центра масс:Vc 0
2
0
MV
К К
2
Кинетическая энергия системы материальных точек
равна сумме кинетической энергии всей массы
системы, мысленно сосредоточенной в её центре масс
и движущейся вместе с ним, и кинетической энергии
той же системы в её относительном движении по
отношению к поступательно движущейся
системе координат с началом в центре масс.
24. Консервативные и неконсервативные силы.
Консервативными называются силы, работа которыхне зависит от того, по какой траектории произошло
перемещение тела, а зависит только от его начального
и конечного положений. Примеры таких сил : упругие
силы и гравитационные силы. Работа упругих сил была
рассмотрена ранее.
Определим работу, совершаемую силой тяготения
при перемещении ею материальной точки массой m .
На расстоянии
R
на данное тело действует сила
Mm
F G 2
R
25.
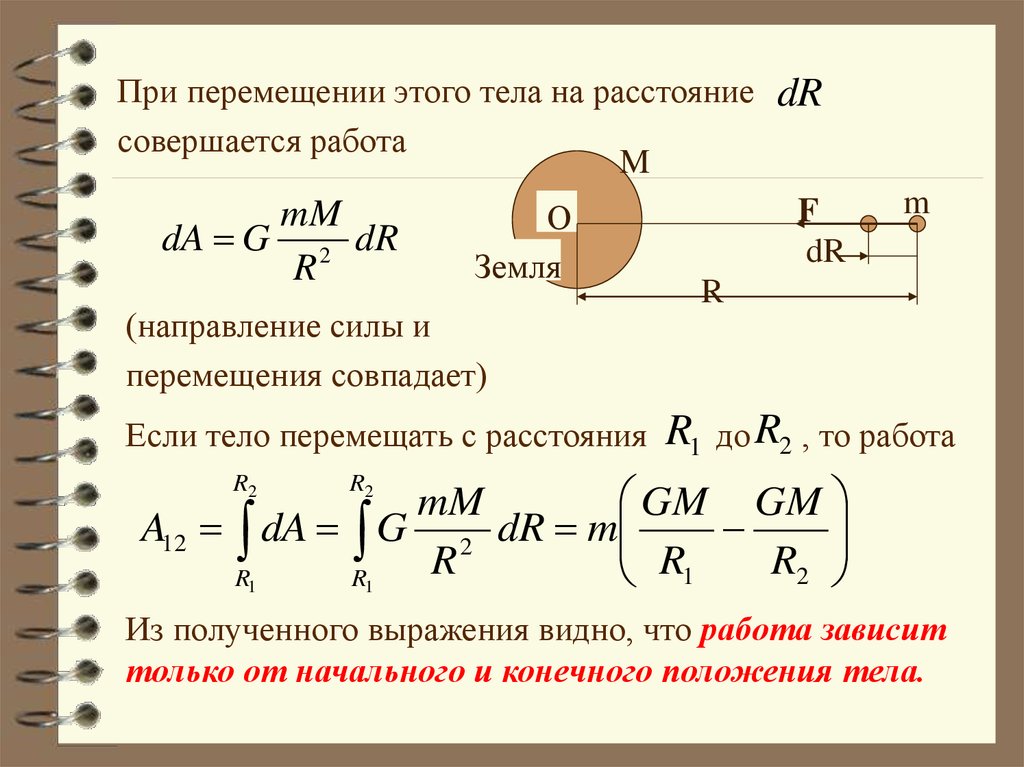
При перемещении этого тела на расстояние dRсовершается работа
M
F
mM
О
dA G 2 dR
dR
Земля
R
R
(направление силы и
перемещения совпадает)
Если тело перемещать с расстояния
R1
m
до R2 , то работа
GM GM
mM
A12 dA G 2 dR m
R
R2
R1
R1
R1
R2
R2
Из полученного выражения видно, что работа зависит
только от начального и конечного положения тела.
26.
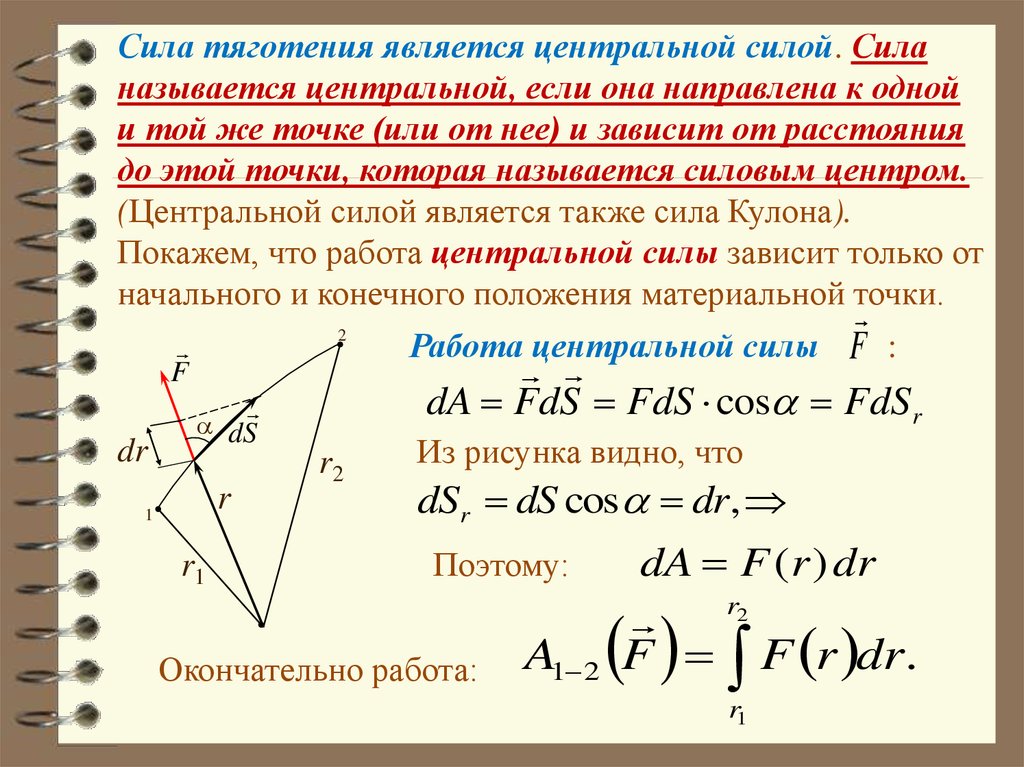
Сила тяготения является центральной силой. Силаназывается центральной, если она направлена к одной
и той же точке (или от нее) и зависит от расстояния
до этой точки, которая называется силовым центром.
(Центральной силой является также сила Кулона).
Покажем, что работа центральной силы зависит только от
начального и конечного положения материальной точки.
2
F
dr
dS
r
1
r1
r2
Работа центральной силы F :
dA FdS FdS cos FdSr
Из рисунка видно, что
dSr dS cos dr,
Поэтому:
Окончательно работа:
A1 2
dA F (r ) dr
r2
F F r dr.
r1
27.
,.
Так как по определению величина центральной силы
есть функция только расстояния r, то значение
определённого интеграла будет зависеть только от
величин r1 и r2, и не будет зависеть от формы
траектории.
Можно дать иное определение консервативной силы.
Рассмотрим перемещение частицы из положения 1 в
положение 3 под действием консервативной силы F
Работа, совершаемая
при этом
2
силой F , не зависит от
траектории, то есть:
1
3
4
A123
.
F A143 F
28.
Тогда работа по замкнутой траектории:.
A0 ( F ) A12341( F ) A123 F A341 F
Но так как:
A341
F A143 F A123 F .
Окончательно:
A0 F A123 F A341 F A123 F A123 F 0 .
Отсюда следует еще одно определение
консервативных сил: работа консервативных сил по
любой замкнутой траектории равна нулю.
29.
Математическая запись этого утверждения может бытьпредставлена, исходя из определения работы, следующим
образом:
Fdr A12 A21 A12 A12 0
L
Интеграл по замкнутому контуру L :
Fdr
L
циркуляцией вектора F .
называется
Введение нового математического понятия векторного
анализа позволяет дать еще одно определение
консервативной силы:
Если циркуляция какого-либо вектора силы равна нулю,
то эта сила консервативна.
F
d
r
0
L
30.
Неконсервативные силы. К ним относятся преждевсего, так называемые диссипативные силы :трение, сила
вязкого сопротивления. Эти силы зависят не только от
конфигурации тел, но и от относительных скоростей
движения.
Сила трения направлена против скорости тела, поэтому
работа сил трения отрицательна. Отсюда определение:
Диссипативными называются такие силы, полная
работа которых при любых движениях в замкнутой
системе всегда отрицательна.
Рассмотрим примеры диссипативных сил: сухое трение
и вязкое трение.
31.
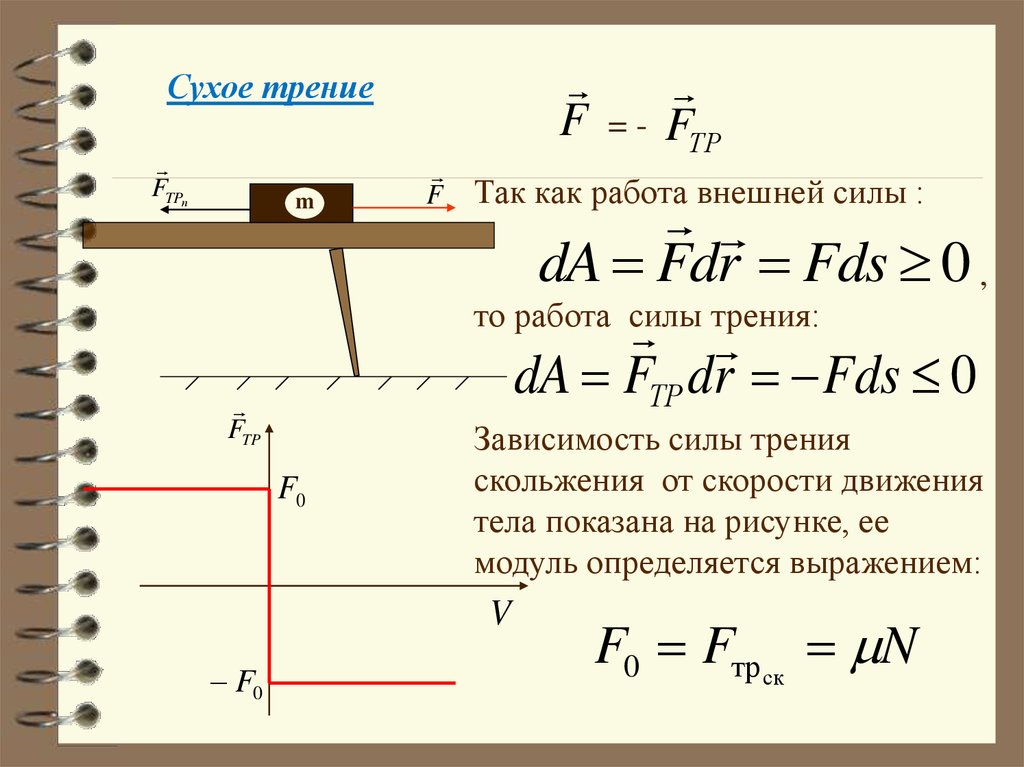
FСухое трение
FTPп
m
m
FTP
F0
F
Так как работа внешней силы :
dA Fdr Fds 0 ,
то работа силы трения:
dA FТР dr Fds 0
Зависимость силы трения
скольжения от скорости движения
тела показана на рисунке, ее
модуль определяется выражением:
V
F0
=-
FТР
F0 Fтр ск N
32.
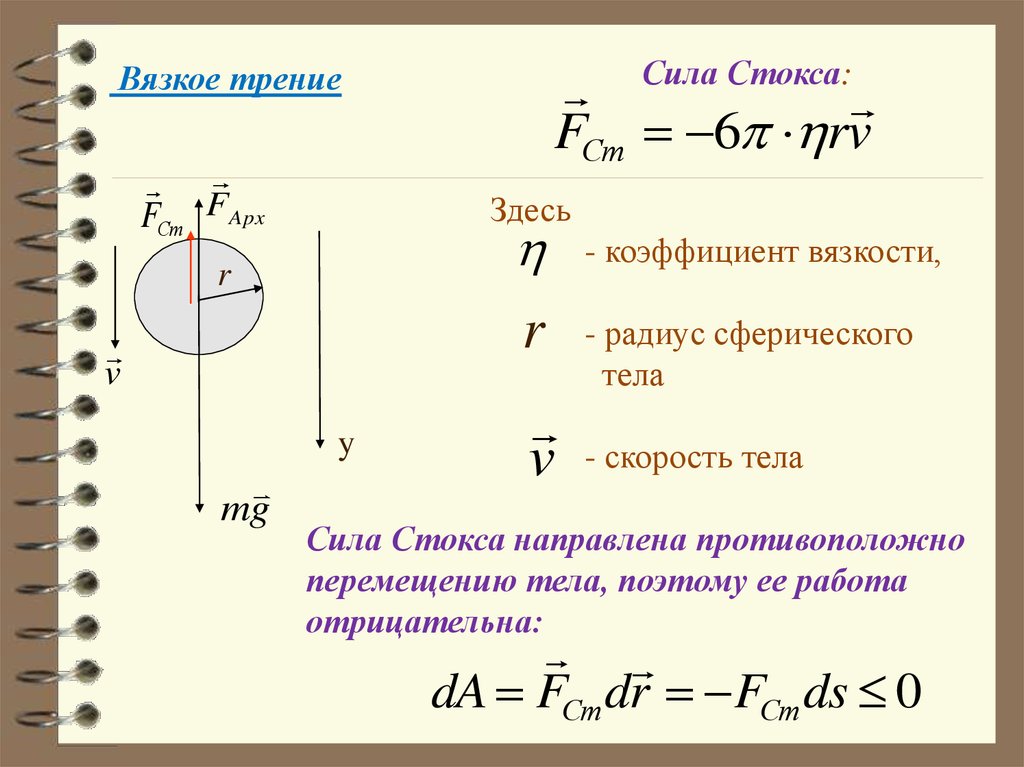
Сила Стокса:FСт 6 rv
Вязкое трение
FСт FApx
Здесь
r
r
v
y
mg
v
- коэффициент вязкости,
- радиус сферического
тела
- скорость тела
Сила Стокса направлена противоположно
перемещению тела, поэтому ее работа
отрицательна:
dA FСт dr FСт ds 0
33.
Еще один вид неконсервативных сил гироскопическиесилы.
Эти силы зависят от скорости материальной точки и
перпендикулярны к этой скорости. Работа таких сил
равна нулю. Примером таких сил является сила
Лоренца:
Здесь q - заряд частицы,
FЛ q V B
V - скорость ее движения
B - индукция магнитного
поля, в котором эта частица движется.
По определению, элементарная работа силы Лоренца:
dA FЛ dS FЛ dS сos 0
так как
cos 0 , поскольку
2
( F V )
Л
34.
Примером таких сил в механике является сила Кориолиса:Здесь m - масса частицы
FК 2m V
V - скорость ее движения
- угловая скорость
вращения неинерциальной системы отсчета.
Аналогично предыдущему рассмотрению:
dA FК dS FК dS сos 0
FК V
35. Потенциальная энергия
Потенциальная энергия –механическая энергия системытел, определяемая их взаимным расположением и
характером сил взаимодействия между ними.
Если на частицу действует консервативная сила F , то
каждой точке поля сил можно сопоставить значение
некоторой функции координат , U Е
которая
пот
называется
потенциальной энергией частицы в поле
данной консервативной силы.
Зная потенциальную энергию, можно вычислить
работу, совершаемую силами поля над телом с массой m
при перемещении его из положения 1 в положение 2.
36.
Эта работа может быть выражена через разностьзначений потенциальной энергии в указанных точках:
A Fdr U1 U 2 (U 2 U1 ) U
2
1
Полученное выражение означает, что работа
консервативных сил равна убыли потенциальной энергии.
Кроме того из нее следует, что потенциальная энергия
определена с точностью до определенной постоянной.
Так как определена только ее разность, то к выражениюU
можно добавить или вычесть любую постоянную величину.
При этом величина U , конечно, будет разной, но работа
консервативной силы останется одной и той же. Поэтому в
каждом конкретном случае договариваются о начале
отсчета потенциальной энергии: в какой именно точке
следует считать U 0
из соображения удобства.
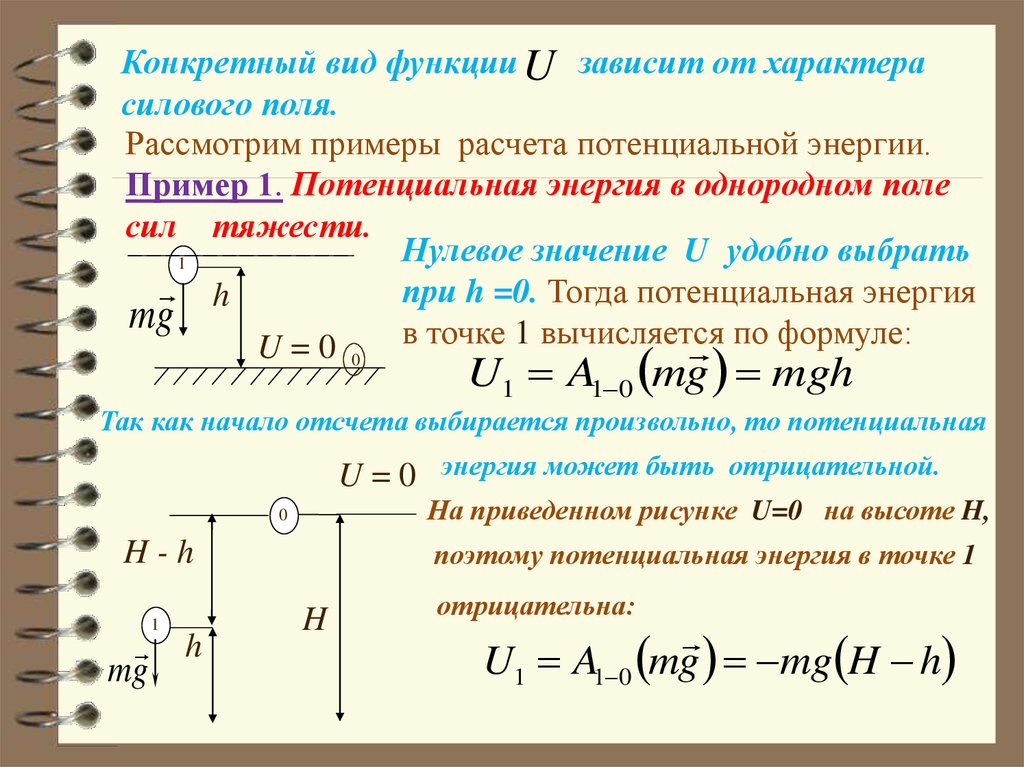
37.
Конкретный вид функции U зависит от характерасилового поля.
Рассмотрим примеры расчета потенциальной энергии.
Пример 1. Потенциальная энергия в однородном поле
сил тяжести.
Нулевое значение U удобно выбрать
1
h
при h =0. Тогда потенциальная энергия
mg
в точке 1 вычисляется
U=0
по формуле:
0
U1 A1 0 mg mgh
Так как начало отсчета выбирается произвольно, то потенциальная
U = 0 энергия может быть отрицательной.
На приведенном рисунке U=0 на высоте H,
0
поэтому потенциальная энергия в точке 1
H-h
1
h
mg
H
отрицательна:
U1 A1 0 mg mg H h
38.
Пример 2. Потенциальная энергия гравитационногопритяжения.
M
F
dR
О
Земля
R
Работа, совершаемая силой
m тяготения по перемещению тела
массой m из точки с радиусом R1 до
точки с радиусом R2 была найдена
ранее, она равна:
GM GM
mM
A12 dA G 2 dR m
R
R2
R1
R1
R1
R2
R2
Нулевое значение потенциальной энергии выбирается при
R . Тогда работа силы тяготения при перемещении
тела из точки с радиусом R на бесконечность равна:
39.
mMmM
A10 dA G 2 dR G
R
R
R
R
Но т.к. работа и потенциальная энергия связаны формулой:
A12 Fdr U1 U 2 (U 2 U1 ) U
2
1
Отсюда находим потенциальную энергию
гравитационного притяжения:
mM
U ( R) G
R
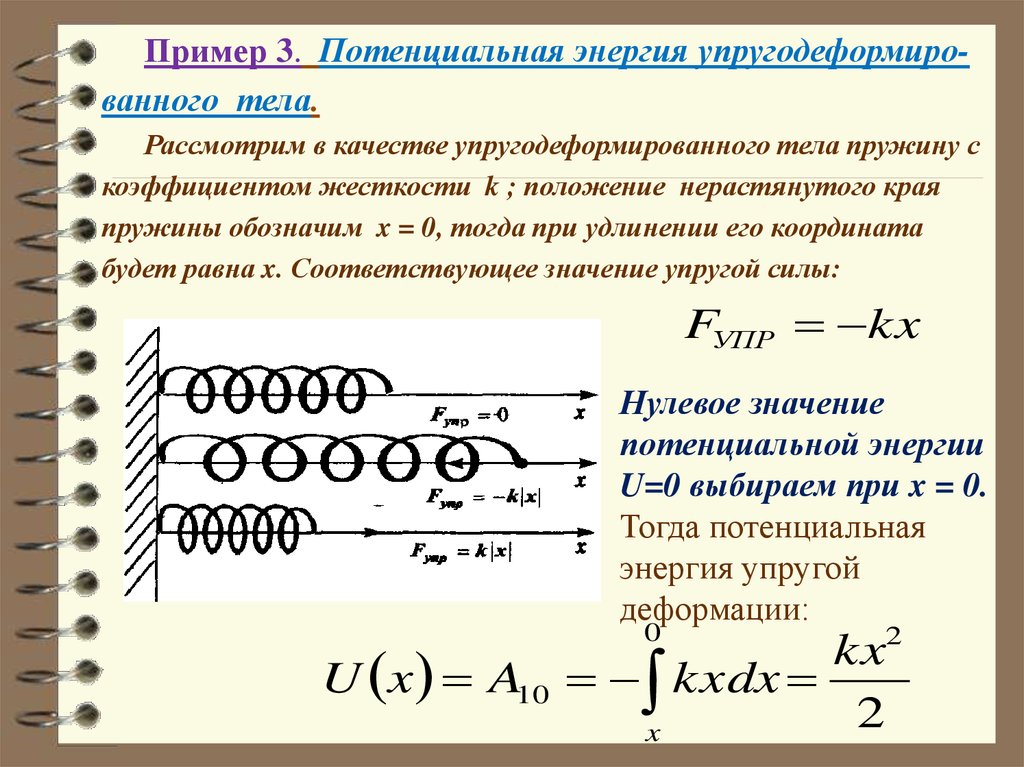
40.
Пример 3. Потенциальная энергия упругодеформированного тела.Рассмотрим в качестве упругодеформированного тела пружину с
коэффициентом жесткости k ; положение нерастянутого края
пружины обозначим x = 0, тогда при удлинении его координата
будет равна x. Соответствующее значение упругой силы:
FУПР kx
Нулевое значение
потенциальной энергии
U=0 выбираем при x = 0.
Тогда потенциальная
энергия упругой
деформации:
0
kx2
U x A10 kxdx
2
x
41.
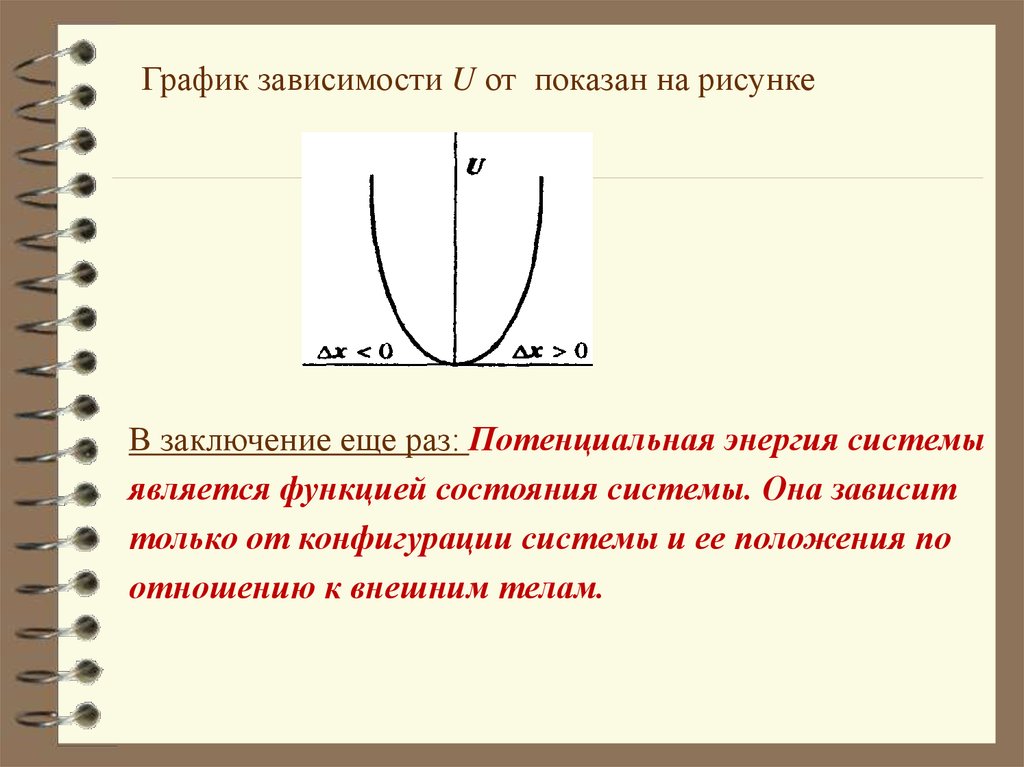
График зависимости U от показан на рисункеВ заключение еще раз: Потенциальная энергия системы
является функцией состояния системы. Она зависит
только от конфигурации системы и ее положения по
отношению к внешним телам.
42. Связь между потенциальной энергией и силой
Пространство, в котором действуют потенциальные(консервативные) силы, называется потенциальным
полем. Каждой точке потенциального поля соответствует
некоторое значение силы F , действующей на тело, и
некоторое значение потенциальной энергии U . Значит
между F и U должна быть связь.
Работа консервативной силы:
dA Fdr dU
43.
Работа консервативной силы:dA Fdr dU
Здесь:
F Fx i Fy j Fz k ,
dr dx i dy j dz k .
Тогда:
Fdr Fx dx Fy dy Fz dz dU .
dy dz 0, то Fx x U .
Если
Окончательно:
U
Fx .
x
44.
По аналогии для двух остальных проекций силы F получаем:U
Fy
y
U
Fz
z
,
Связь консервативной силы с потенциальной энергией
принимает вид:
U U U
F Fx i Fy j Fz k
i
j
k
y
z
x
В правой части этого выражения стоит оператор набла,
или градиент (понятие векторного анализа):
grad i
j k
x
y
z
Тогда окончательно получаем:
F grad U
или
F U
45.
Закон сохранения механической энергииЗакон сохранения энергии – результат обобщения
многих экспериментальных данных.
Идея этого закона принадлежит Ломоносову,
изложившему закон сохранения материи и движения, а
количественная формулировка закона сохранения энергии
дана Ю. Майером , Г. Гельмгольцем и Дж Джоулем.
Получим закон сохранения энергии, рассмотрев
уравнения движения системы материальных точек.
46. Джоуль Джеймс Прескотт (1818 –1889) – английский физик, один из первооткрывателей закона сохранения энергии.
Первые уроки по физике ему давалДж. Дальтон, под влиянием которого
Джоуль начал свои эксперименты. Работы
посвящены механике, электромагнетизму,
кинетической теории газов.
47.
Рассмотрим систему материальных точек с массамиm , m ,..., m , которые движутся со скоростями:
1
2
n
1 , 2 ,..., n . Для каждой из этих точек запишем
второй закон Ньютона:
d v1
m1
F '1 F1 f1
dt
d v2
Или:
m2
F '2 F2 f 2
dt
……………………………..…… d v
mi i F 'i Fi f i
d vn
dt
mn
F 'n Fn f n
dt
48.
d vimi
F 'i Fi f i
dt
F 'i - равнодействующая внутренних консервативных
сил, действующих на каждую из этих точек;
Fi
-равнодействующая внешних сил, которые также
будем считать консервативными;
f i -равнодействующие внешних неконсервативных
сил, которые действуют также на каждую из
материальных точек
Двигаясь под действием сил, точки системы за интервал
времени
dt
равные
. dr
d r1 , d r2 ,...,
n
совершают перемещения, соответственно
49.
Умножим каждое из уравнений движения скалярно насоответствующее перемещение и, снова учтем, что
d ri vi dt
В результате получим:
m1 (v1d v1 ) ( F '1 F1 )d r1 f1d r1
m2 (v2 d v2 ) ( F '2 F2 )d r2 f 2 d r2
……………………………………………….
mn (vn d vn ) (F 'n Fn )d rn f n d rn
или:
mi (vi d vi ) ( F 'i Fi )d ri fi d ri
50.
Сложив эти уравнения, получим:n
n
n
m (v d v ) ( F ' F ) d r f d r
i 1
i
i
i
i
i 1
i
i
i 1
i
i
Первое слагаемое левой части:
n
n
m (v d v ) d ( m v
i 1
где
i
dK
i
i
i 1
2
i i
/ 2) dK
- приращение кинетической энергии системы.
Второе слагаемое левой части:
n
( F ' F )d r
i 1
i
i
i
элементарная работа внутренних и внешних консервативных сил, взятая со знаком минус, т.е. элементарное
приращение потенциальной энергии dU системы.
51.
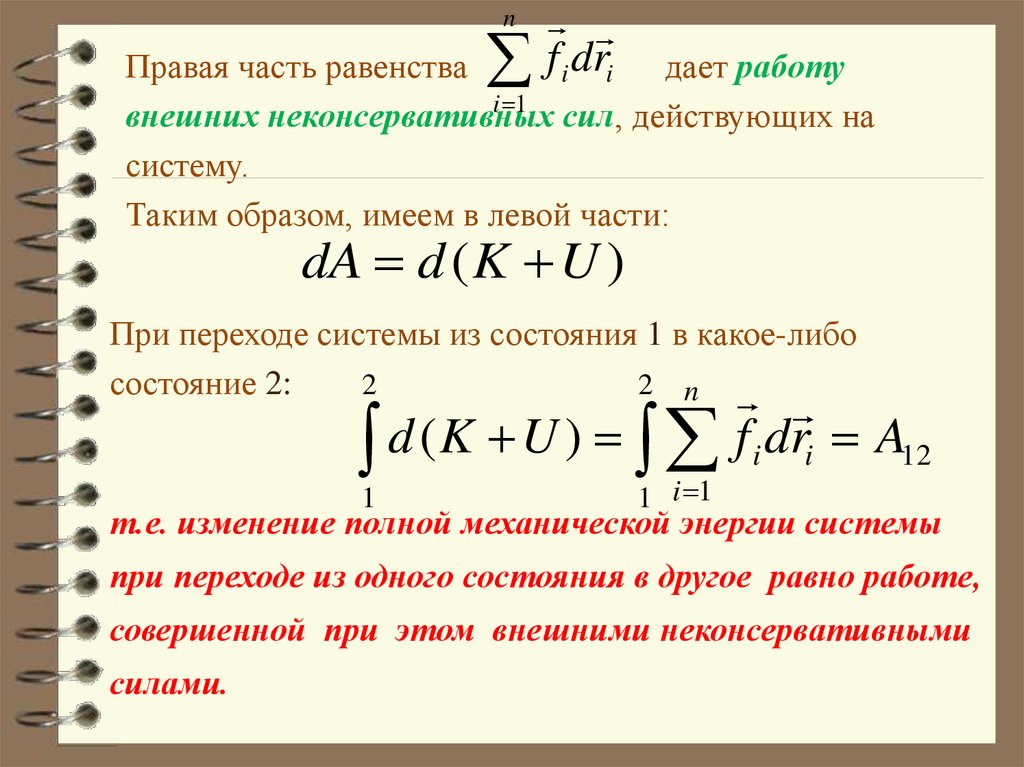
nf i dri
Правая часть равенства
дает работу
i 1
внешних неконсервативных
сил, действующих на
систему.
Таким образом, имеем в левой части:
dA d ( K U )
При переходе системы из состояния 1 в какое-либо
2
2 n
состояние 2:
d (K U )
1
1 i 1
f i dri A12
т.е. изменение полной механической энергии системы
при переходе из одного состояния в другое равно работе,
совершенной при этом внешними неконсервативными
силами.
52.
Если внешние неконсервативные силы отсутствуют, то:d (K U ) 0
откуда:
K U E const
т.е. полная механическая энергия системы сохраняется
постоянной. Полученное выражение представляет собой
закон сохранения механической энергии:
В системе тел, между которыми действуют
только консервативные силы, полная
механическая энергия сохраняется, т.е. не
изменяется со временем.
53.
Итак, в консервативных системах полная механическаяэнергия остается постоянной. Могут происходить лишь
превращения кинетической энергии в потенциальную и
обратно в эквивалентных количествах так, что полная
энергия остается неизменной.
Закон сохранения механической энергии связан с
однородностью времени.
Однородность времени проявляется в том, что физические
законы инвариантны относительно выбора начала отсчета
времени. Например, при свободном падении тела в поле сил
тяжести его скорость и пройденный путь зависят лишь от
начальной скорости и продолжительности свободного
падения тела и не зависят от того, когда тело начало падать.
54.
Общефизический закон сохранения энергииСуществует еще один вид систем – диссипативные
системы, в которых механическая энергия постепенно
уменьшается за счет преобразования в другие
(немеханические) формы энергии. Этот процесс получил
название диссипации (или рассеяние) энергии. Строго
говоря, все системы в природе являются диссипативными.
Действительно, из полученного ранее выражения
d ( K U ) dE dA
дисс
12
0
видно, что при наличии диссипативных сил полная
механическая энергия уменьшается.
55.
Итак, в системе, в которой действуют такженеконсервативные силы, (например, силы трения,)
полная механическая энергия системы не сохраняется.
Следовательно, в этих случаях закон сохранения
механической энергии не справедлив.
Однако при «исчезновении» механической энергии всегда
возникает эквивалентное количество энергии другого вида.
Таким образом, энергия никогда не исчезает и
не появляется вновь, она лишь превращается
из одного вида в другой.
В
этом
и
заключается
физическая
сущность
общефизического
закона
сохранения
и
превращения
энергии
–
сущность
неуничтожимости материи и ее движения.
56.
Таким образом, энергия никогда не исчезает и непоявляется вновь, она лишь превращается из
одного вида в другой.
Этот закон не есть просто закон количественного
сохранения энергии, а закон сохранения и превращения
энергии,
выражающий
и
качественную
сторону
взаимного превращения различных форм движения
друг в друга.
Закон
сохранения
и
превращения
энергии
–
фундаментальный закон природы, он справедлив как
для систем макроскопических тел, так и для систем
микротел.