")
















 декаметрового диапазона волн")





![Радиолокационная станция обзора летного поля [12,13]](https://cf2.ppt-online.org/files2/slide/1/1zLurSPUfcsIRy9HX2jJOd8aFi67thbQpMvnWg/slide-45.jpg "Радиолокационная станция обзора летного поля [12,13]")











 Физика
ФизикаПохожие презентации:




")





Мультистатическая радиоголография и MIMO радиолокация (обзор отечественных и зарубежных исследований)
1. Мультистатическая радиоголография и MIMO радиолокация (обзор отечественных и зарубежных исследований)
В. В. ЧапурскийМосковский Государственный технический университет
им. Н.Э. Баумана,
valch2008@yandex.ru
2.
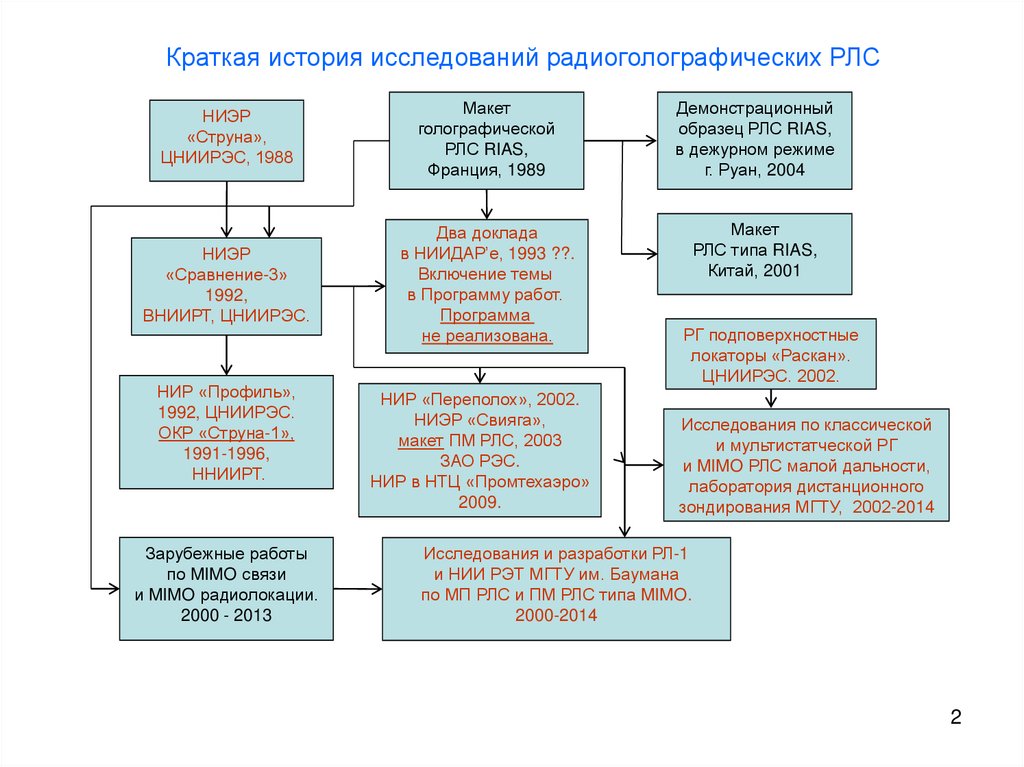
Краткая история исследований радиоголографических РЛСНИЭР
«Струна»,
ЦНИИРЭС, 1988
Макет
голографической
РЛС RIAS,
Франция, 1989
Демонстрационный
образец РЛС RIAS,
в дежурном режиме
г. Руан, 2004
НИЭР
«Сравнение-3»
1992,
ВНИИРТ, ЦНИИРЭС.
Два доклада
в НИИДАР’е, 1993 ??.
Включение темы
в Программу работ.
Программа
не реализована.
Макет
РЛС типа RIAS,
Китай, 2001
НИР «Профиль»,
1992, ЦНИИРЭС.
ОКР «Струна-1»,
1991-1996,
ННИИРТ.
Зарубежные работы
по MIMO связи
и MIMO радиолокации.
2000 - 2013
НИР «Переполох», 2002.
НИЭР «Свияга»,
макет ПМ РЛС, 2003
ЗАО РЭС.
НИР в НТЦ «Промтехаэро»
2009.
РГ подповерхностные
локаторы «Раскан».
ЦНИИРЭС. 2002.
Исследования по классической
и мультистатческой РГ
и MIMO РЛС малой дальности,
лаборатория дистанционного
зондирования МГТУ, 2002-2014
Исследования и разработки РЛ-1
и НИИ РЭТ МГТУ им. Баумана
по МП РЛС и ПМ РЛС типа MIMO.
2000-2014
2
3.
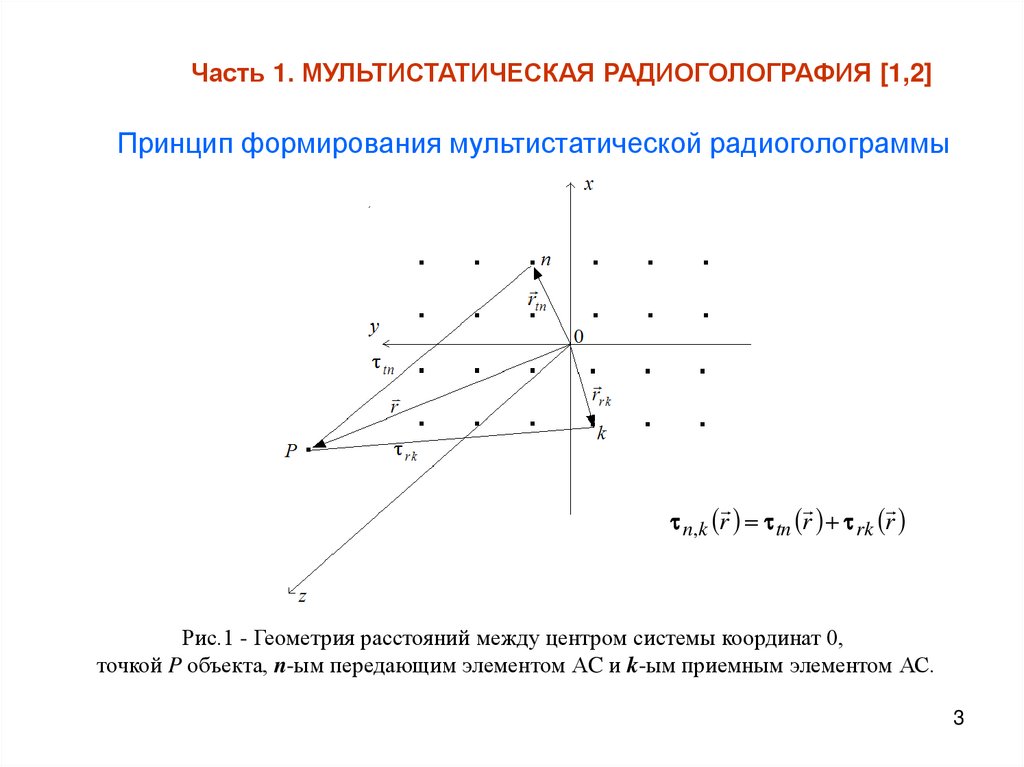
Часть 1. МУЛЬТИСТАТИЧЕСКАЯ РАДИОГОЛОГРАФИЯ [1,2]Принцип формирования мультистатической радиоголограммы
n,k r tn r rk r
Рис.1 - Геометрия расстояний между центром системы координат 0,
точкой P объекта, n-ым передающим элементом АC и k-ым приемным элементом АС.
3
4.
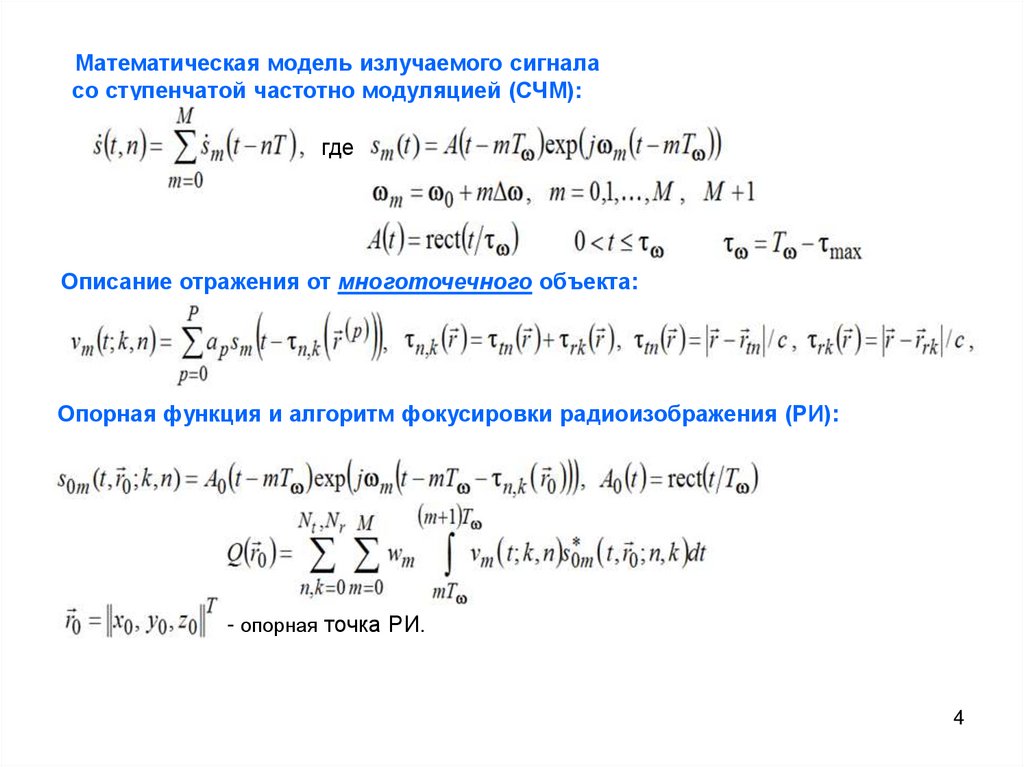
Математическая модель излучаемого сигналасо ступенчатой частотно модуляцией (СЧМ):
где
Описание отражения от многоточечного объекта:
Опорная функция и алгоритм фокусировки радиоизображения (РИ):
- опорная точка РИ.
4
5.
ОФН МРГ - РИ точечного объектаQ(r , r0 )
n ,k ,m
M 1 T
mT
s0 m t , r ; k , n s
0m
t , r0 ; k , n dt
(r , r0 )
Q(r , r0 )
Q(r , r ) Q(r0 , r0 )
5
6.
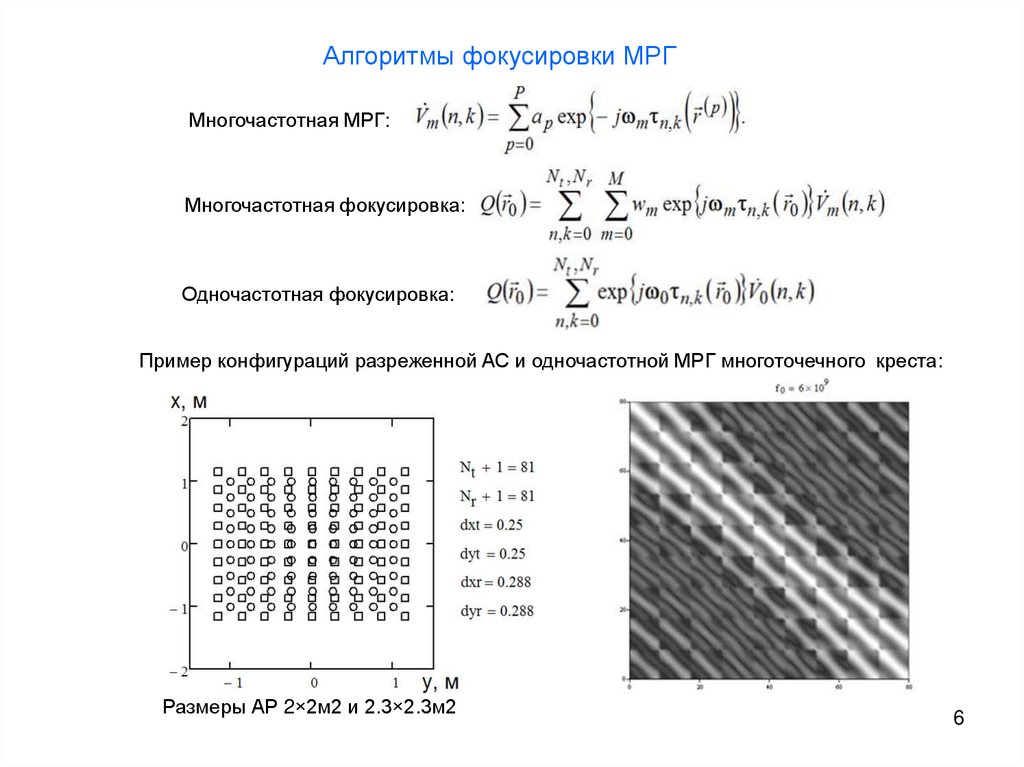
Алгоритмы фокусировки МРГМногочастотная МРГ:
Многочастотная фокусировка:
Одночастотная фокусировка:
Пример конфигураций разреженной АС и одночастотной МРГ многоточечного креста:
Размеры АР 2×2м2 и 2.3×2.3м2
6
7.
Модели наблюдения многоточечных объектов,приятые при расчетах сфокусированных РИ
Плоский (двумерный) объект:
Объемный (трехмерный) объект:
x
x
Антенная система
Антенная система
0
y
z0
z0
z
0
y
z
7
8.
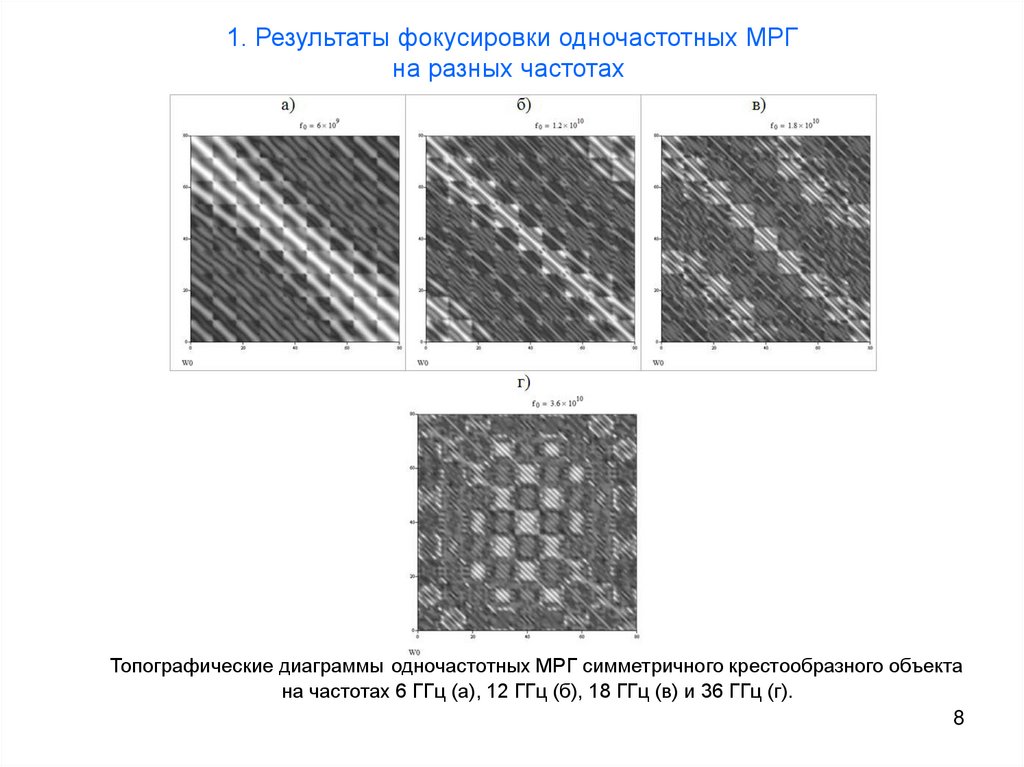
1. Результаты фокусировки одночастотных МРГна разных частотах
Топографические диаграммы одночастотных МРГ симметричного крестообразного объекта
на частотах 6 ГГц (а), 12 ГГц (б), 18 ГГц (в) и 36 ГГц (г).
8
9.
РИ плоского крестообразного объекта на удалении 1,5 м при частотах 6 ГГц (а, в)и 18 ГГц (б, г) в картинной плоскости (а, б) и вертикальной плоскости (в, г),
проходящей через нормаль к плоскости АС в ее центре.
9
10.
2. Влияние дальности до объекта на качество фокусировки РИ(«глубина резкости»)
РИ плоского крестообразного объекта при увеличении удаления от АС (1м, 2м и 3м)
в случае одночастотной МРГ на частоте 15 ГГц. Верхний ряд - РИ в картинной плоскости,
нижний ряд - РИ в вертикальной плоскости, проходящей через нормаль к плоскости АС в ее центре.
10
11.
3. Моделирование РИ трехмерного объектапри фокусировке одночастотных и многочастотных МРГ
11
12.
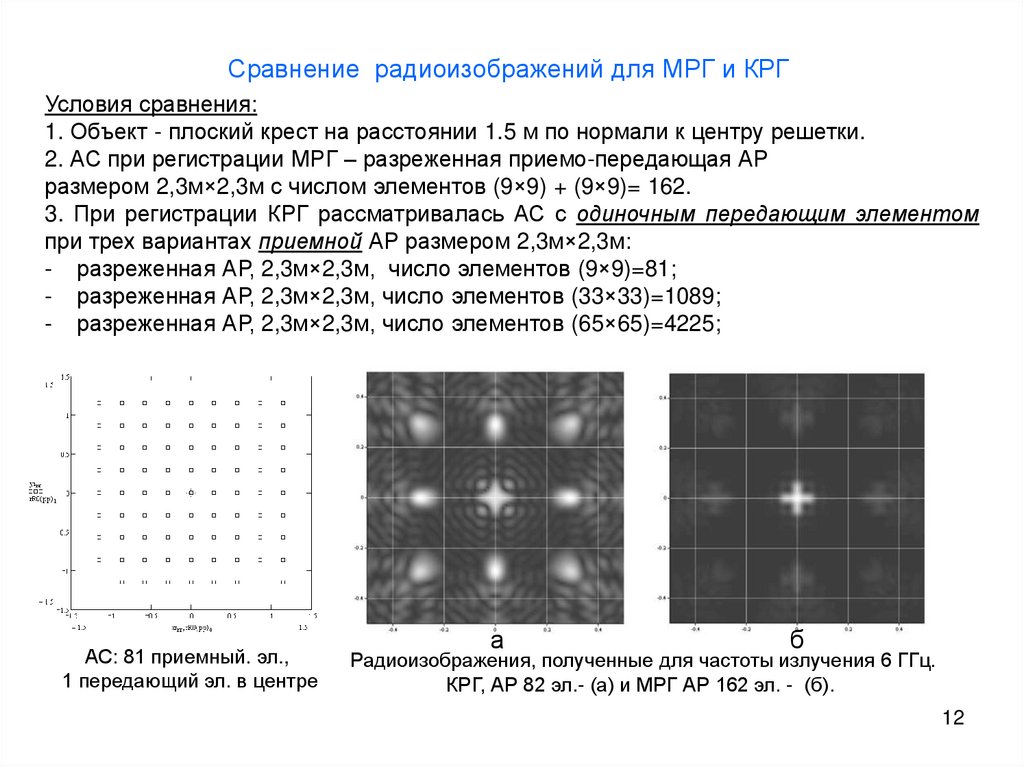
Сравнение радиоизображений для МРГ и КРГУсловия сравнения:
1. Объект - плоский крест на расстоянии 1.5 м по нормали к центру решетки.
2. АС при регистрации МРГ – разреженная приемо-передающая АР
размером 2,3м×2,3м с числом элементов (9×9) + (9×9)= 162.
3. При регистрации КРГ рассматривалась АС с одиночным передающим элементом
при трех вариантах приемной АР размером 2,3м×2,3м:
- разреженная АР, 2,3м×2,3м, число элементов (9×9)=81;
- разреженная АР, 2,3м×2,3м, число элементов (33×33)=1089;
- разреженная АР, 2,3м×2,3м, число элементов (65×65)=4225;
АС: 81 приемный. эл.,
1 передающий эл. в центре
а
б
Радиоизображения, полученные для частоты излучения 6 ГГц.
КРГ, АР 82 эл.- (а) и МРГ АР 162 эл. - (б).
12
13.
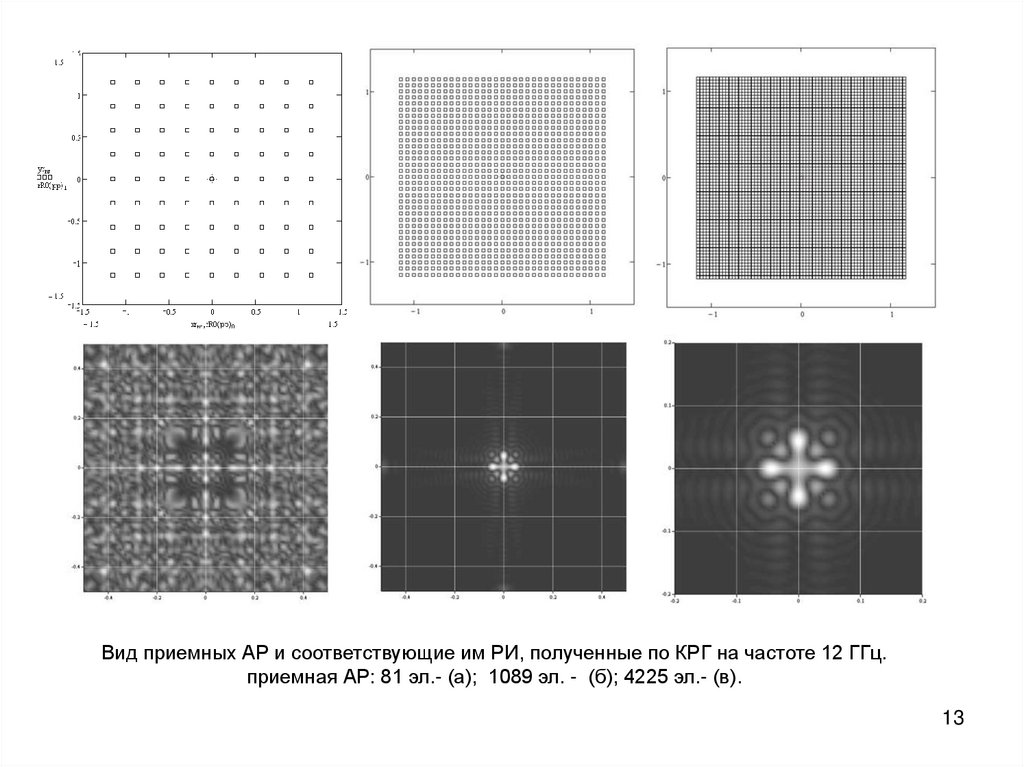
Вид приемных АР и соответствующие им РИ, полученные по КРГ на частоте 12 ГГц.приемная АР: 81 эл.- (а); 1089 эл. - (б); 4225 эл.- (в).
13
14.
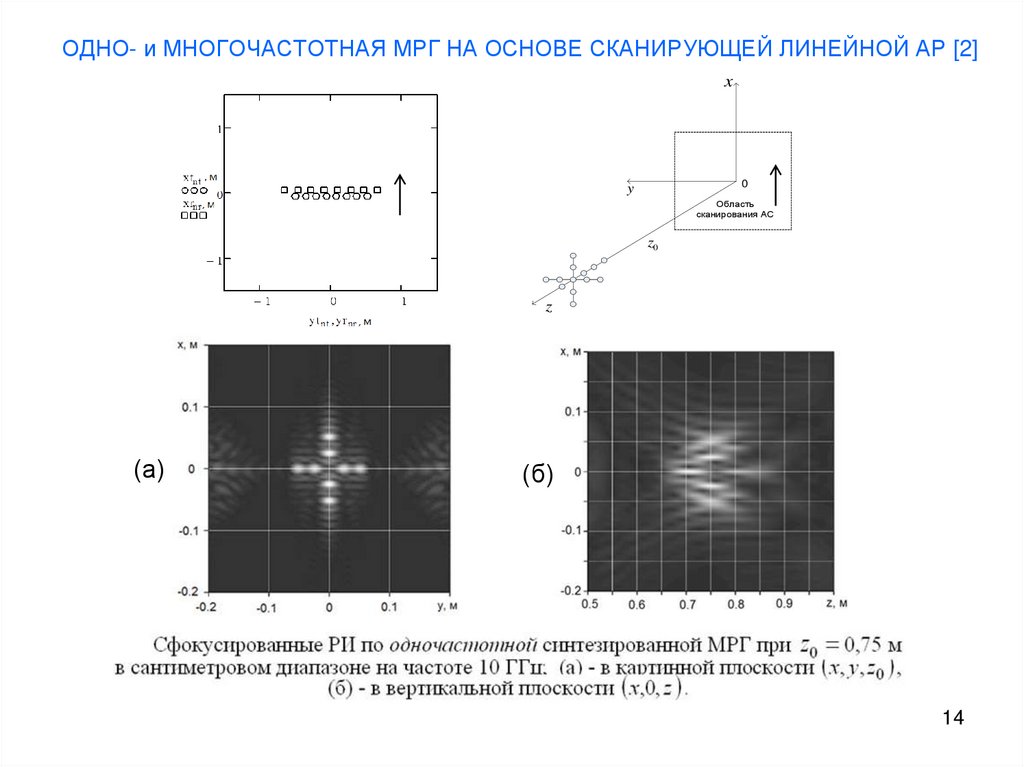
ОДНО- и МНОГОЧАСТОТНАЯ МРГ НА ОСНОВЕ СКАНИРУЮЩЕЙ ЛИНЕЙНОЙ АР [2]x
0
y
Область
сканирования АС
z0
z
(а)
(б)
14
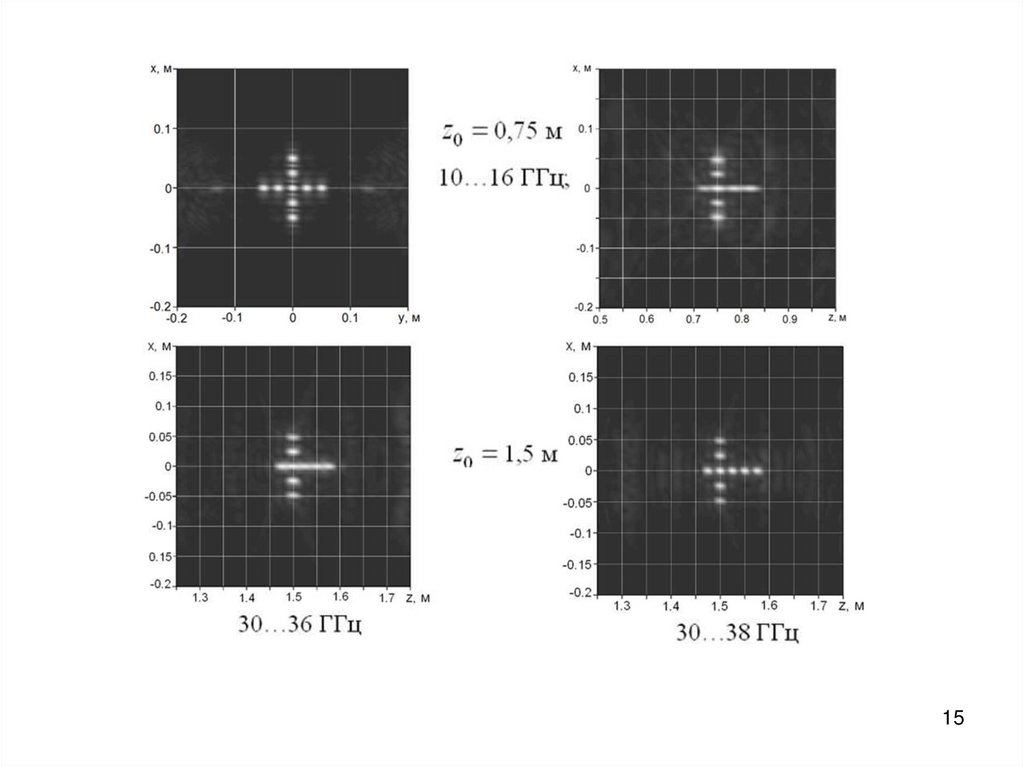
15.
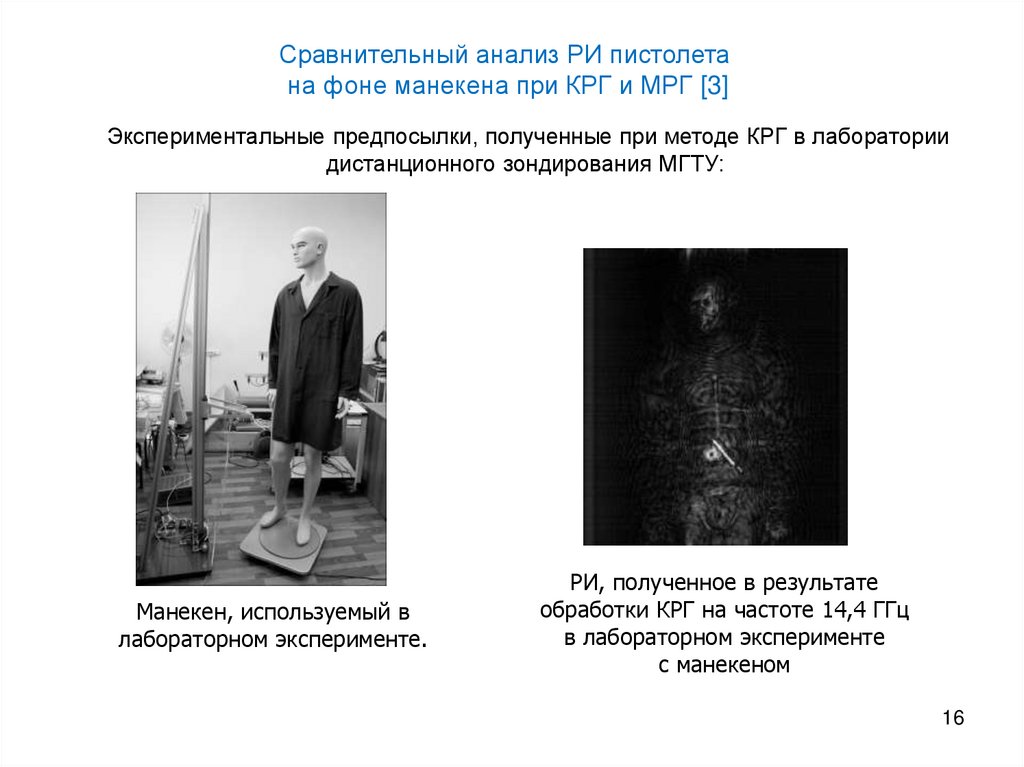
1516.
Сравнительный анализ РИ пистолетана фоне манекена при КРГ и МРГ [3]
Экспериментальные предпосылки, полученные при методе КРГ в лаборатории
дистанционного зондирования МГТУ:
Манекен, используемый в
лабораторном эксперименте.
РИ, полученное в результате
обработки КРГ на частоте 14,4 ГГц
в лабораторном эксперименте
с манекеном
16
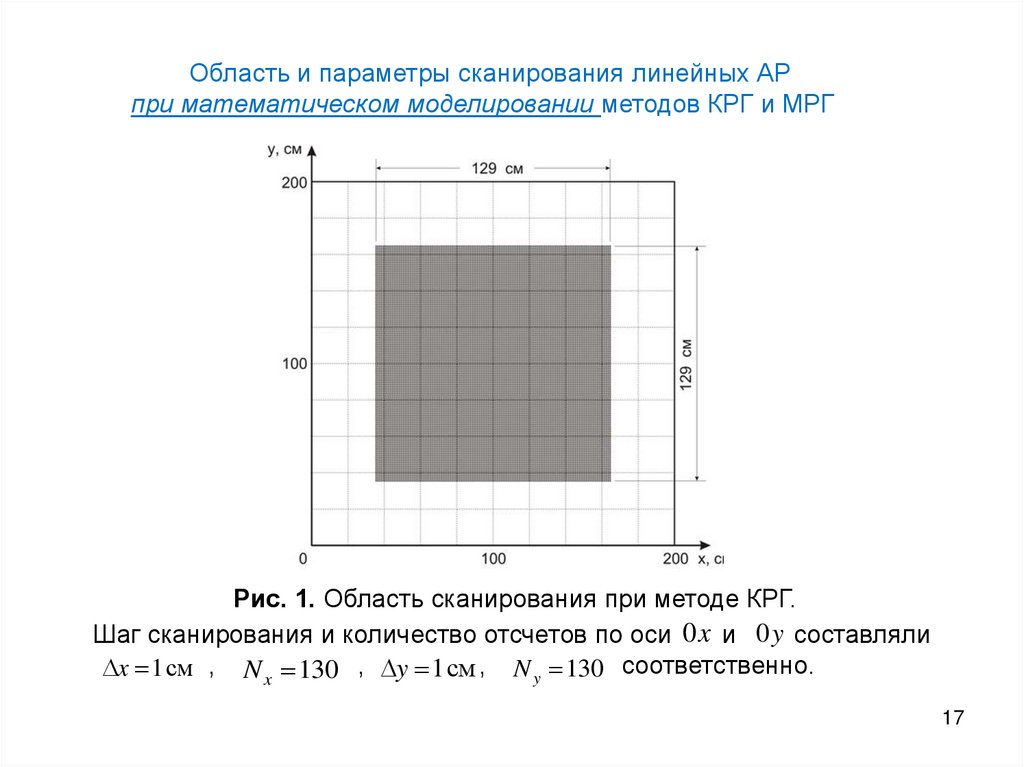
17.
Область и параметры сканирования линейных АРпри математическом моделировании методов КРГ и МРГ
Рис. 1. Область сканирования при методе КРГ.
Шаг сканирования и количество отсчетов по оси 0x и 0y составляли
x 1см , N x 130 , y 1см , N y 130 соответственно.
17
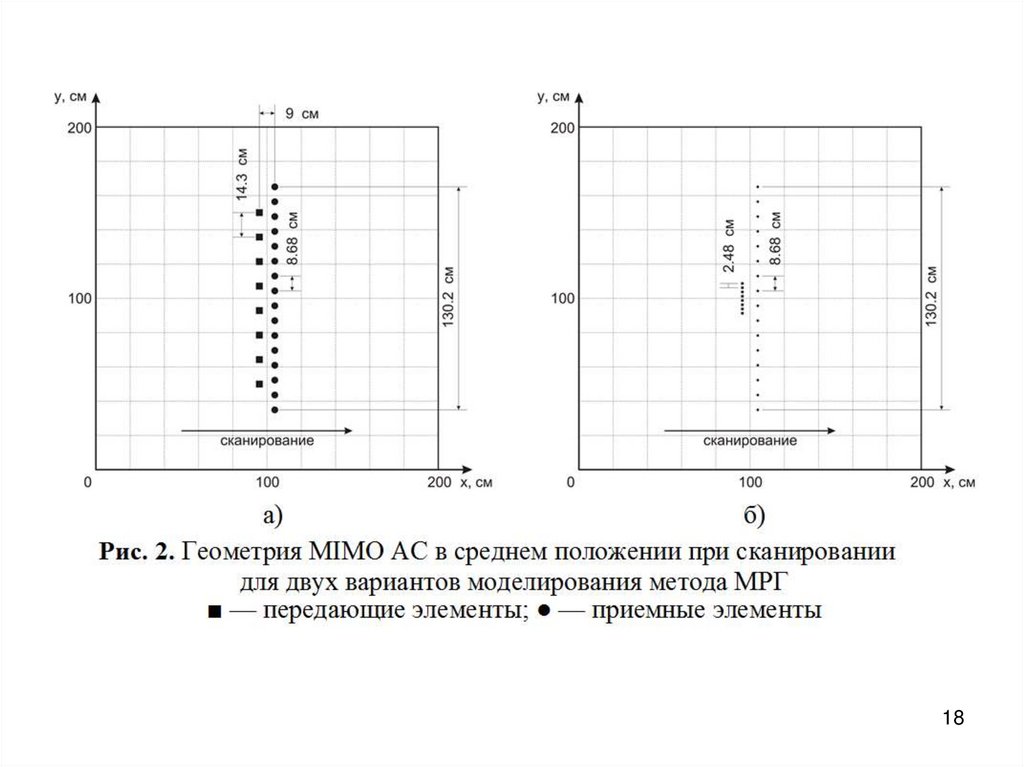
18.
1819.
а)б)
Рис. 3. Газовый пистолет: а) 3D-макет; б) фотография
а)
б)
в)
Рис. 4. РИ уединенного пистолета, восстановленные по одночастотным КРГ (а),
МРГ по варианту 1 (б) и МРГ по варианту 2 (в) на частоте 10 ГГц
19
20.
а)б)
в)
Рис. 5. РИ уединенного пистолета, восстановленные по одночастотным КРГ (а),
МРГ по варианту 1 (б) и МРГ по варианту 2 (в) на частоте 16 ГГц
а)
б)
в)
Рис. 6. Плоские и объемные РИ уединенного пистолета, восстановленные по
многочастотным в полосе частот 10…16 ГГц КРГ (а), МРГ по варианту 1 (б)
и МРГ по варианту 2 (в)
20
21.
Рис. 7. Модель человека с размещенным на поясе пистолетом21
22.
б)в)
а)
Рис. 9. Результаты восстановления РИ при размещении пистолета на теле
человека по одночастотным на частоте 16 ГГц КРГ (а), МРГ по варианту 1 (б)
и МРГ по варианту 2 (в)
б)
в)
а)
Рис. 10. Результаты восстановления РИ при размещении пистолета на теле
человека по многочастотным в полосе частот 10…16 ГГц КРГ (а),
МРГ по варианту 1 (б) и МРГ по варианту 2 (в)
22
23. 1. Фокусировка РИ методом суммы обратных проекций
Сравнение быстродействия алгоритмов обратных проекцийи не эквидистантного БПФ (НБПФ) [4]
1. Фокусировка РИ методом суммы обратных проекций
Комплексный корреляционный интеграл одночастотной МРГ:
Q r0
Nt , Nr
n , k 0
exp j 0 r0 rtn r0 rrk
c
V n, k
Q r0
РИ объекта
2. Фокусировка РИ по МРГ в приближении Френеля на основе
не эквидистантного БПФ
Q x0 , y0
0
Wp exp j
p x0 p y0
cz
p 0
0
W p V p exp j 0
c
P
2
rtn p rrk p
2 z0
2
p xtn p xrk p
p yrn p yrk p
23
24.
Параметры численного экспериментаЧастота излучения,
Число элементов АР,
Размер передающей АР,
Межэлементный шаг передатчиков,
Размер приёмной АР,
Межэлементный шаг приёмников,
0,288х0,288м
6 ГГц
9х9
2x2м
0,25м
2,3х2,3 м
Объект:
Многоточечный симметричный плоский объект в
форме
прямоугольного креста
Размеры объекта
0,3х0,3м
Число отражающий элементов
9
Шаг между элементами
0,075м
Удаление от АР
3м
Метод фокусировки основан на быстром вычисления
НДПФ*, основанном на быстрой гауссовой привязке
не эквидистантных узлов (fast Gaussian gridding).
Реализация алгоритма в среде MatLab представлена
по адресу:
http://www.mathworks.com/matlabcentral/fileexchange/25
135-nufft--nfft--usfft .
* Leslie Greengard, Jun-Yub Lee. Accelerating the
Nonuniform Fast Fourier Transform. SIAM Review. Vol.
46. No.3, pp.443-453.
24
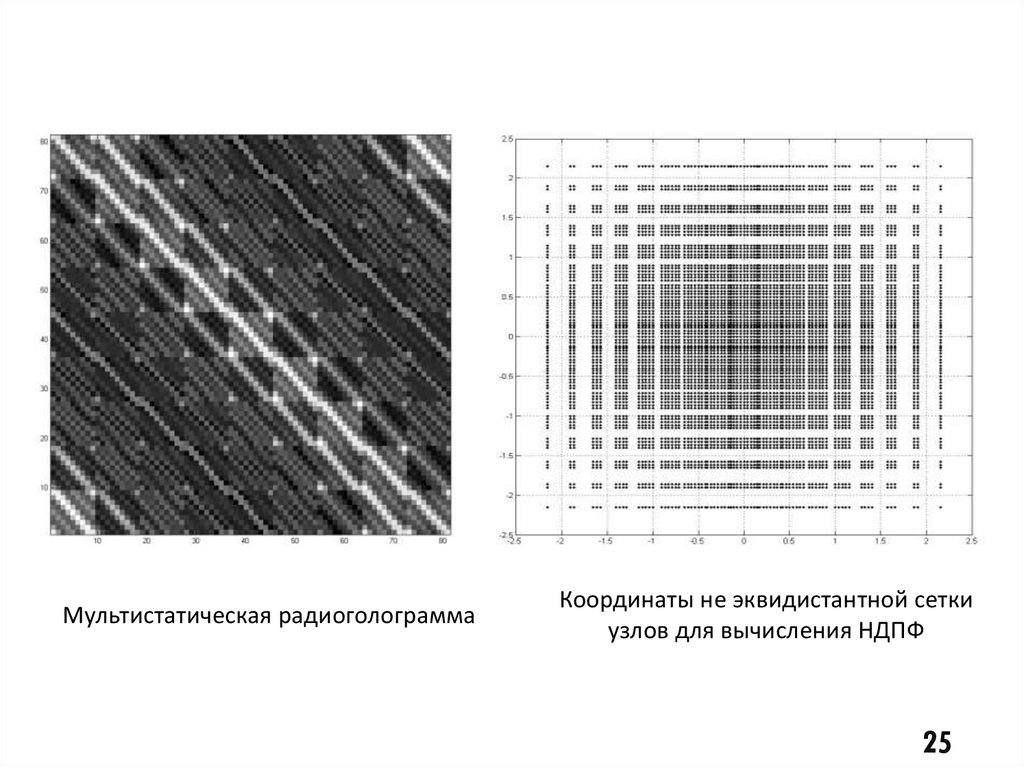
25.
Мультистатическая радиоголограммаКоординаты не эквидистантной сетки
узлов для вычисления НДПФ
25
26.
Точный метод обратныхпроекций
Прямой расчет
не эквидистантного ДПФ
(приближение Френеля)
НБПФ по не эквидистантной
сетке узлов
(приближение Френеля)
26
27.
Гипотеза о возможности применения классическогоэквидистантного БПФ к фокусировке РИ по МРГ
при определенных видах АР
Передающая и приемная эквидистантные АР
со специально подобранными
положением и шагом.
Решетка виртуальных эквидистантных узлов,
позволяющая применение классического БПФ
при фокусировке МРГ.
27
28. Примеры практической реализации ПМ РЛС типа MIMO. Многочастотная ПМ РЛС (проект RIAS – “Radar a Impulsion et Antenne
Часть 2. ПРОСТРАНСТВЕННО-МНОГОКАНАЛЬНЫЕ РЛС (ПМ РЛС) MIMO [5-11]Примеры практической реализации ПМ РЛС типа MIMO.
Многочастотная ПМ РЛС
(проект RIAS – “Radar a Impulsion et Antenne Synthetiques” - Франция)
Фото экспериментального макета РЛС типа RIAS, созданного во Франции (1989г)
и расположенного на острове Левант в Средиземном море.
28
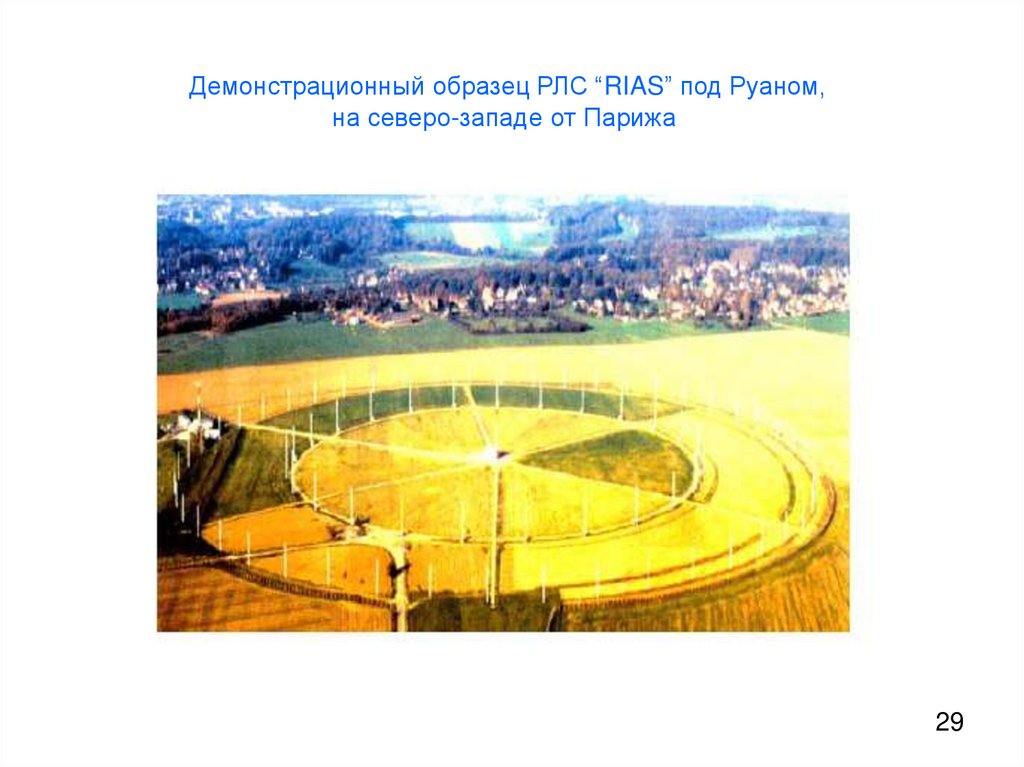
29.
Демонстрационный образец РЛС “RIAS” под Руаном,на северо-западе от Парижа
29
30. 1. К пояснению принципа действия РЛС типа RIAS – синтез импульса и апертуры.
3031. 2. Укрупненная структурная схема системы цифровой обработки сигналов РЛС RIAS
3132.
3. Бистатический принцип реализации РЛС “RIAS”Прм
Прд
Цель
32
33.
4. Метод сопряжения фазы,как дальнейшее развитие системы «RIAS» (Патент ONERA).
4.1. Функциональная схема,
поясняющая принцип сопряжения фазы.
4.2. Моделирование фокусировки диаграммы
по методу сопряжения фазы в процессе
сопровождения цели.
33
34. Экспериментальный макет РЛС типа RIAS, созданный в КНР
Фотография антенной системы РЛС RIAS,построенной в Китае
34
35.
Пример сопоставления трасс воздушных объектов,построенных традиционной РЛС С-диапазона (а)
и трасс тех же целей, построенных в РЛС типа RIAS (б).
35
36. Загоризонтная РЛС «NOSTRADAMUS» (Франция) декаметрового диапазона волн
Расположение антенных элементовРЛС «NOSTRDAMUS» на местности.
Красные антенны – приемопередающие,
зеленые – только приемные.
Вид биконических антенн РЛС «NOSTRADAMUS»,
расположенной в 100км на запад от Парижа.
36
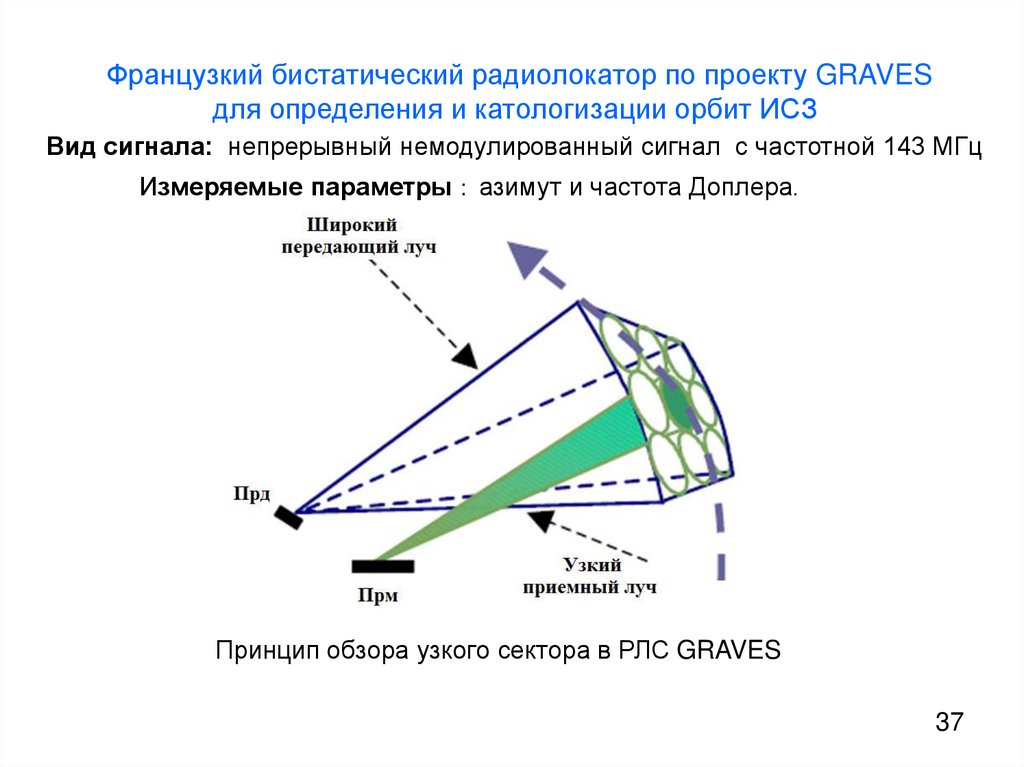
37.
Французкий бистатический радиолокатор по проекту GRAVESдля определения и катологизации орбит ИСЗ
Вид сигнала: непрерывный немодулированный сигнал с частотной 143 МГц
Измеряемые параметры : азимут и частота Доплера.
Принцип обзора узкого сектора в РЛС GRAVES
37
38.
Измерение параметров орбиты КА в РЛС GRAVES38
39.
Передающая позиция и ее модуль с ФАР в составе РЛС GRAVES39
40.
Приемная АР РЛС GRAVES40
41.
Закон изменения частоты Доплера принимаемого сигналапри отражении от КА и анализ его корреляции с опорой
41
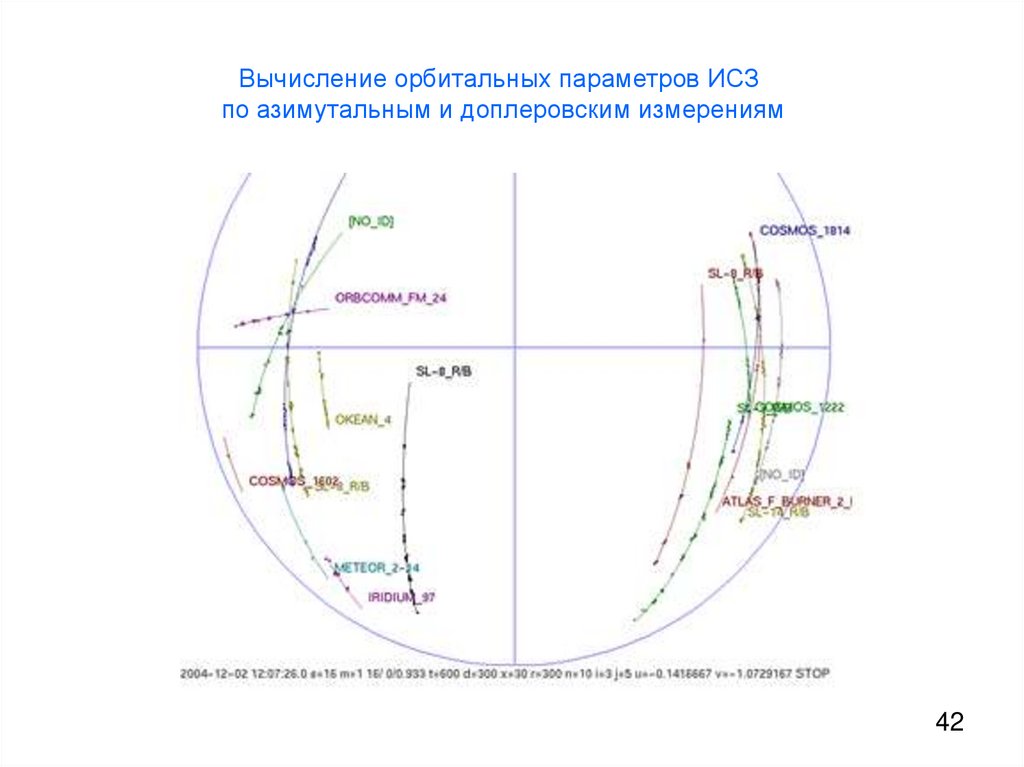
42.
Вычисление орбитальных параметров ИСЗпо азимутальным и доплеровским измерениям
42
43.
Уравнения дальности обнаружения MIMO РЛСс многочастотными сигналами
Rобн 4
P0и Gt Gr 2 ц и Nt N r M t Tн / Tповт Lдоп
Rобн 4
64 qпор k БT ш
3
o
ММЧС-КНИ
P0Gt Gr 2 ц N t N r M t Tн Lдоп
64 3 qпор k Б T o ш
ММЧС-НИ
43
44.
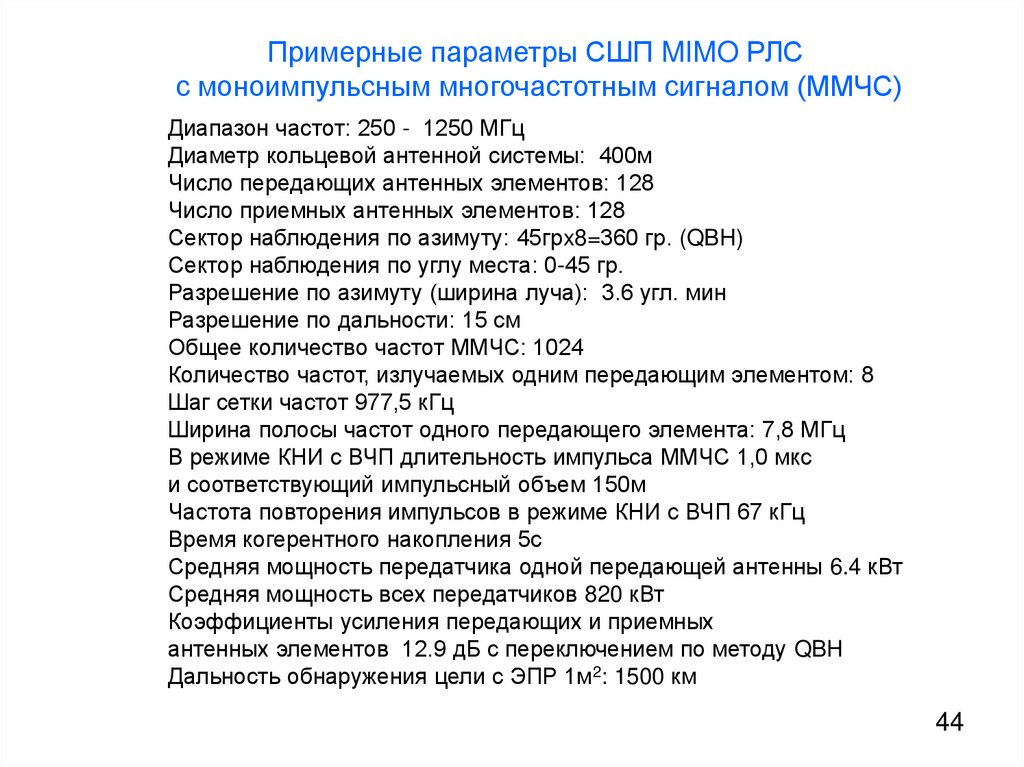
Примерные параметры СШП MIMO РЛСс моноимпульсным многочастотным сигналом (ММЧС)
Диапазон частот: 250 - 1250 МГц
Диаметр кольцевой антенной системы: 400м
Число передающих антенных элементов: 128
Число приемных антенных элементов: 128
Сектор наблюдения по азимуту: 45грx8=360 гр. (QBH)
Сектор наблюдения по углу места: 0-45 гр.
Разрешение по азимуту (ширина луча): 3.6 угл. мин
Разрешение по дальности: 15 см
Общее количество частот ММЧС: 1024
Количество частот, излучаемых одним передающим элементом: 8
Шаг сетки частот 977,5 кГц
Ширина полосы частот одного передающего элемента: 7,8 МГц
В режиме КНИ с ВЧП длительность импульса ММЧС 1,0 мкс
и соответствующий импульсный объем 150м
Частота повторения импульсов в режиме КНИ с ВЧП 67 кГц
Время когерентного накопления 5с
Средняя мощность передатчика одной передающей антенны 6.4 кВт
Средняя мощность всех передатчиков 820 кВт
Коэффициенты усиления передающих и приемных
антенных элементов 12.9 дБ с переключением по методу QBH
Дальность обнаружения цели с ЭПР 1м2: 1500 км
44
45.
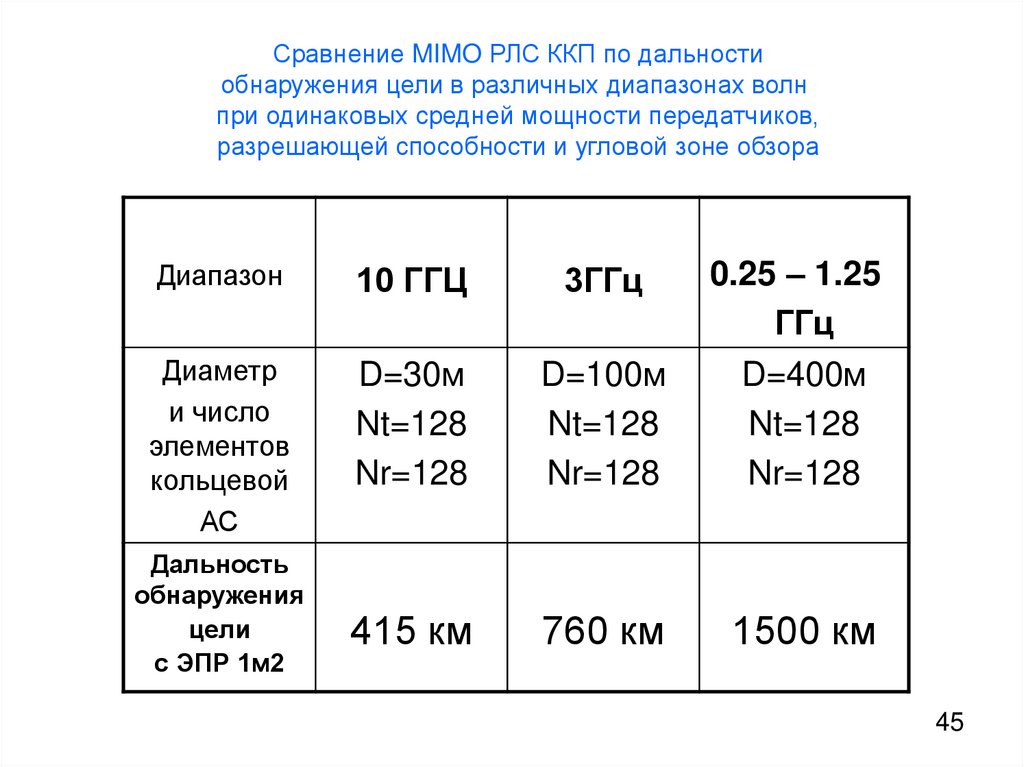
Сравнение MIMO РЛС ККП по дальностиобнаружения цели в различных диапазонах волн
при одинаковых средней мощности передатчиков,
разрешающей способности и угловой зоне обзора
Диапазон
10 ГГЦ
3ГГц
Диаметр
и число
элементов
кольцевой
АС
D=30м
Nt=128
Nr=128
D=100м
Nt=128
Nr=128
0.25 – 1.25
ГГц
D=400м
Nt=128
Nr=128
415 км
760 км
1500 км
Дальность
обнаружения
цели
с ЭПР 1м2
45
46. Радиолокационная станция обзора летного поля [12,13]
4647. Исходные данные для анализа вариантов построения РЛС ОЛП на основе MIMO локации
Рабочая частота15 ГГц
Полоса частот
15 МГц
Количество частотных компонент,
M = 512
Шаг по частоте,
Δf = 29.354 кГц
Количество передающих
элементов АР,
ar
1
yt n
Nt = 32
yr n
t
0
r
Количество приемных
элементов АР,
Период обновления информации
Nr = 29
1
ar
T0 = 1 секунда
Максимальная дальность
Rmax = 5000 м
ЭПР цели
σц = 1 м2
Пороговое отношение сигнал/шум
q∑ = 13 дБ
1
ar
0
xt n xr n
t
1
r
ar
47
48. Кольцевая антенная система с пространственной развязкой многоэлементных передающего и приемного колец
rr 190
80
rt
70
( h 0.01) 60
( h 0.1)
( h 0.2)
h
50
( h 0.4)
40
( h 0.8)
30
20
10
0
0
0.4
0.8
1.2
1.6
2
2.4
2.8
3.2
3.6
4
h
rr
105
120
90
1
a 0.513
75
105
f( 0) 1.997
60
135
120
45
a 0.525
75
f( 0) 1.988
60
135
45
0.1
0.1
150
30
150
0.01
165
90
1
15
ff ( )
30
0.01
165
15
ff ( )
180
0.001
0
195
345
210
330
225
315
240
300
255
270
285
180
0.001
0
195
345
210
330
225
315
240
300
255
270
285
48
49. Укрупненная структурная схема РЛС ОЛП с последовательным излучением частотных компонент многочастотного непрерывного ЗС и
одноканальными передатчиком и приемником50. Характеристики и параметры технического облика РЛС ОЛП, построенной на основе принципов MIMO радиолокации с непрерывным
последовательнымизлучением частотных компонент многочастотного сигнала
сектор обзора по азимуту =360˚;
период обновления информации по
целям 1.0с;
разрешающая способность по
дальности 10м;
полосы частот сигнала =15МГц при
общем числе излучаемых частот 512 и
равномерном шаге частотной
расстройки 29.296 КГц;
максимальная дальность действия
=5000м по целям с ЭПР 1.0 м2 при
пороговом отношении сигнал/шум 13
дБ;
передающее
устройство:
разрешающая способность по поперечной
дальности 15м на дальности 2000м, что
отвечает разрешению по азимуту 0.43˚;
среднеквадратичная погрешность
измерения по дальности 10м;
среднеквадратичная погрешность
измерения по азимуту 0.25˚;
средняя частота излучения =15 ГГц;
вид излучения сигнала: последовательное
излучение частот последовательными
элементами передающей антенной
системы – пространственно-временная
ступенчатая частотная модуляция;
одноканальный
передатчик или распределенное передающее
устройство с последовательным включением
передающих элементов антенной системы с
помощью СВЧ переключателей; подводимая к
передающему элементу средняя и пиковая
мощности соответственно 23.9 Вт и 764.2 Вт; средняя
мощность всей передающей системы 764.2 Вт
приемное устройство: одноканальный приемник с
последовательным подключением приемных элементов
антенной системы с помощью СВЧ переключателей; полоса
пропускания приемного устройства 440 кГц, динамический
диапазон не менее 70 дБ при факторе шума 4.0
50
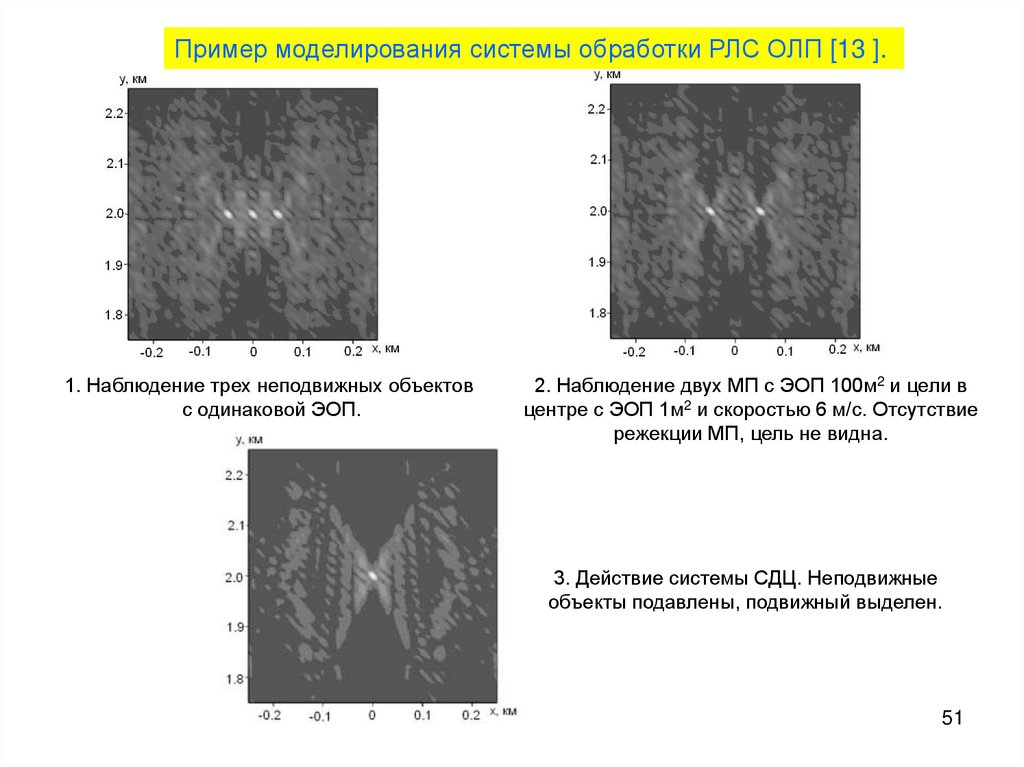
51.
Пример моделирования системы обработки РЛС ОЛП [13 ].1. Наблюдение трех неподвижных объектов
с одинаковой ЭОП.
2. Наблюдение двух МП с ЭОП 100м2 и цели в
центре с ЭОП 1м2 и скоростью 6 м/с. Отсутствие
режекции МП, цель не видна.
3. Действие системы СДЦ. Неподвижные
объекты подавлены, подвижный выделен.
51
52.
РАДИОЛОКАТОР МАЛОЙ ДАЛЬНОСТИ С MIMO АНТЕННОЙ СИСТЕМОЙ ИМНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ [14]
Макет двухкоординатной MIMO РЛС малой дальности с СЧМ ЗС в полосе от 1450 МГц до 1750 МГц.
Использовалось 16 частот с равномерным шагом по частоте.
(б)
(а)
Топографическая диаграмма ССФ при отсутствии (а) и наличии (б) ЧПК (эксперимент).
52
53.
Принцип создания пространственно распределенной MIMO РЛ системыс узконаправленными управляемыми ФАР [15].
53
54.
МЕТОДЫ ПВ ОБРАБОТКИ СИГНАЛОВВ МНОГОЧАСТОТНЫХ ПМ РЛС ТИПА MIMO [16,17]
1. Пачечный ММЧ зондирующий сигнал (ЗС):
I
sn t А t iTr exp j nt , n 0,1, , N t
i 0
2. Принимаемый сигнал от
Nt
P
P 1
целей:
p
p
srec t; k q exp j n t r ; n, k
n 0 p 0
I
p
A t r ; n, k
i 0
3. Опорный сигнал:
Nt
p
1
p
1 iTr
, k 0,1, , N r
sref t ; k ; r0 , 0 exp j n t r0 ; n, k 1 0
n 0
I
A t r0 ; n, k 1 0 iTr , k 0,1, , N r
i 0
p p 0 2vr p c
,
0 2vr 0 c 0 0
54
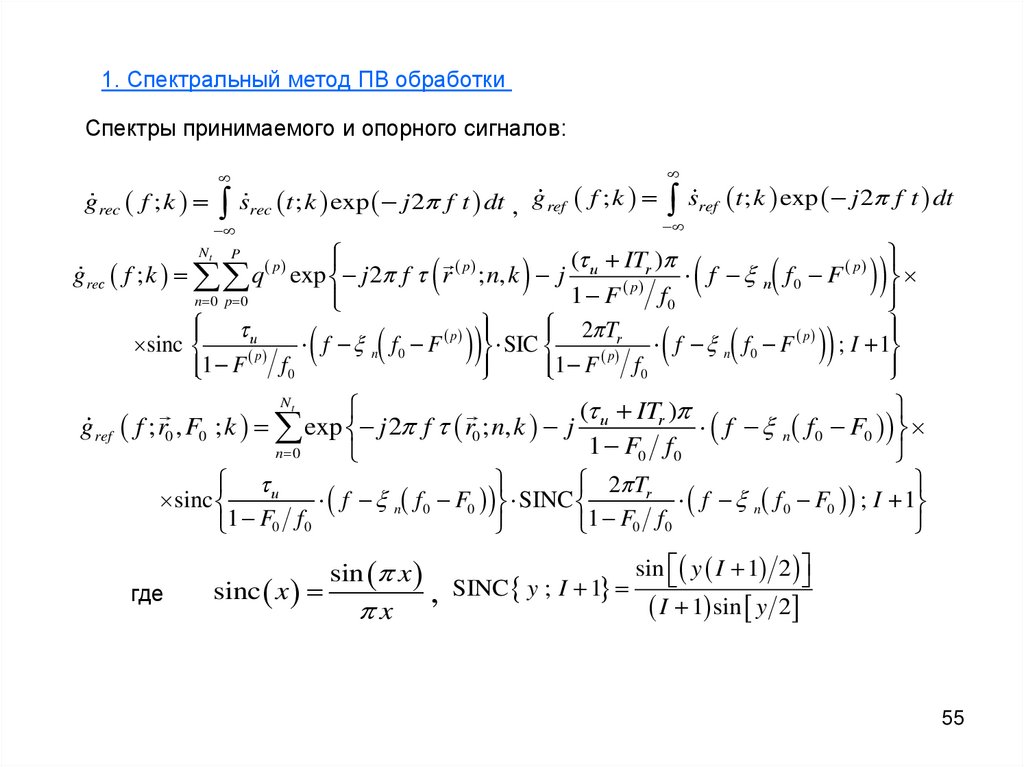
55.
1. Спектральный метод ПВ обработкиСпектры принимаемого и опорного сигналов:
g rec f ; k
srec t; k exp j 2 f t dt ,
g ref
f ; k sref t ; k exp j 2 f t dt
( IT )
p
p
p
g reс f ; k q exp j 2 f r ; n, k j и p r f n f 0 F
1 F
f0
n 0 p 0
2 Tr
и
p
p
sinc
f
f
F
SIC
f
f
F
;
I
1
n 0
n 0
p
p
1 F f 0
1 F f 0
Nt
P
( ITr )
g ref f ; r0 , F0 ; k exp j 2 f r0 ; n, k j и
f n f 0 F0
1 F0 f 0
n 0
и
2 Tr
sinc
f n f 0 F0 SINC
f n f 0 F0 ; I 1
Nt
1 F0 f 0
где
sin x
sinc x
x
,
1 F0 f 0
sin y I 1 2
SINC y ; I 1
I 1 sin y 2
55
56.
Исходные данные ПМ РЛС и целей:60
30
yt n
0
yr m
30
60
60
30
0
30
60
1.5 108
1.502 108
1.504 108
f0
8
1.506 10
8
1.508 10
8
1.51 10
5 105
3 105
1 105
ff
5
1 10
5
3 10
5
5 10
xt n xr m
0.5
q 1
0.1
56 103
xx 56.4 103
100 103
0
3
yy 3 10
0
0
0
zz
4 103
200
FF 300
100
56
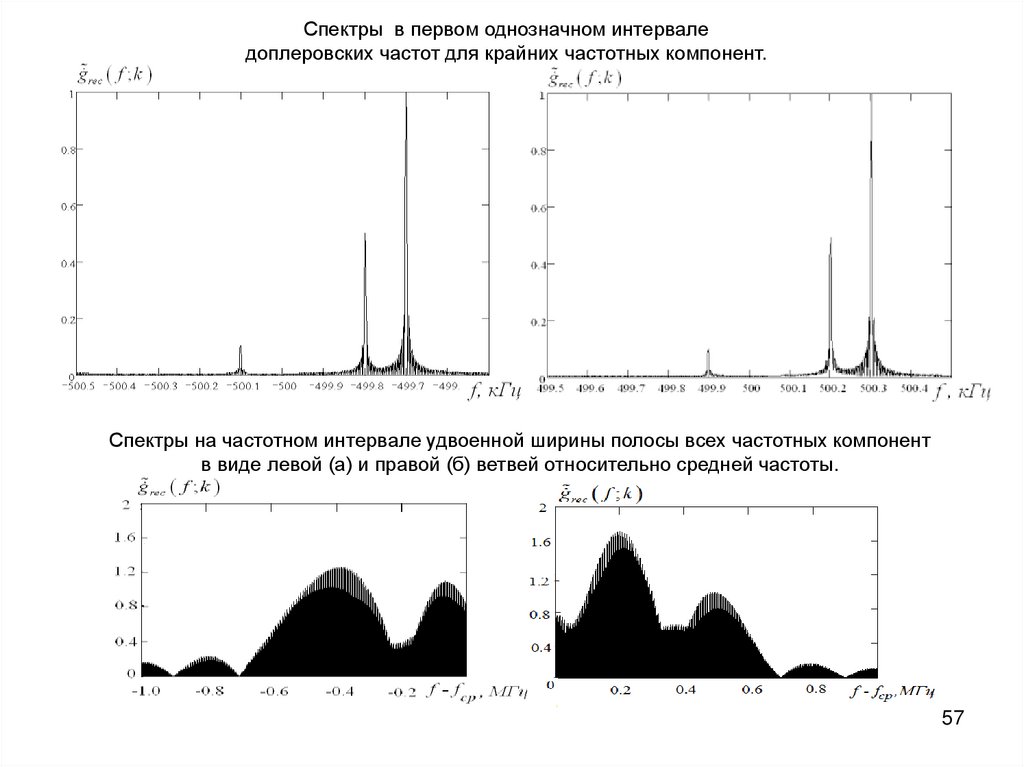
57.
Спектры в первом однозначном интерваледоплеровских частот для крайних частотных компонент.
Спектры на частотном интервале удвоенной ширины полосы всех частотных компонент
в виде левой (а) и правой (б) ветвей относительно средней частоты.
57
58.
Алгоритм пространственно-спектральной обработки:Q r0 , F0
где
m m2
Nr
Nt
wm g rec f n,m F0 ; k exp j 2
m m1
k 0 n 0
j m и ITr
m и
wm exp
sinc
,
Tr
Tr
f n , m F f n, m F f ср ,
f n ,m F0 r0 ; n, k ,
m
f n ,m F f 0 F n
f ср
f 0Tr
n 1 n f
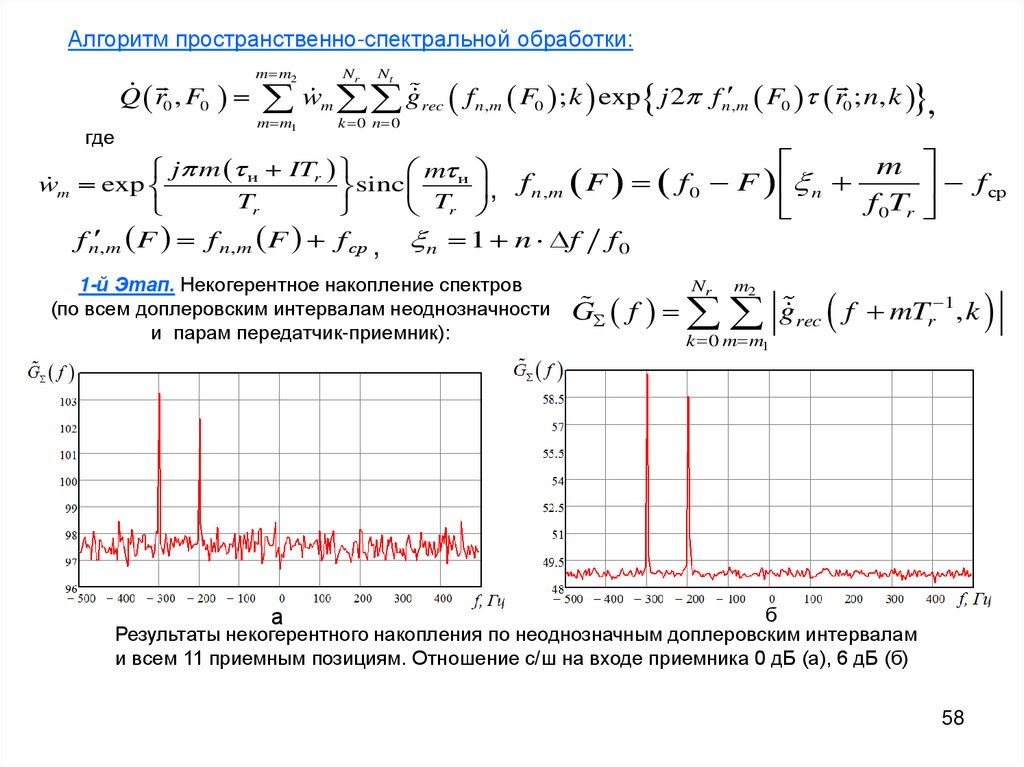
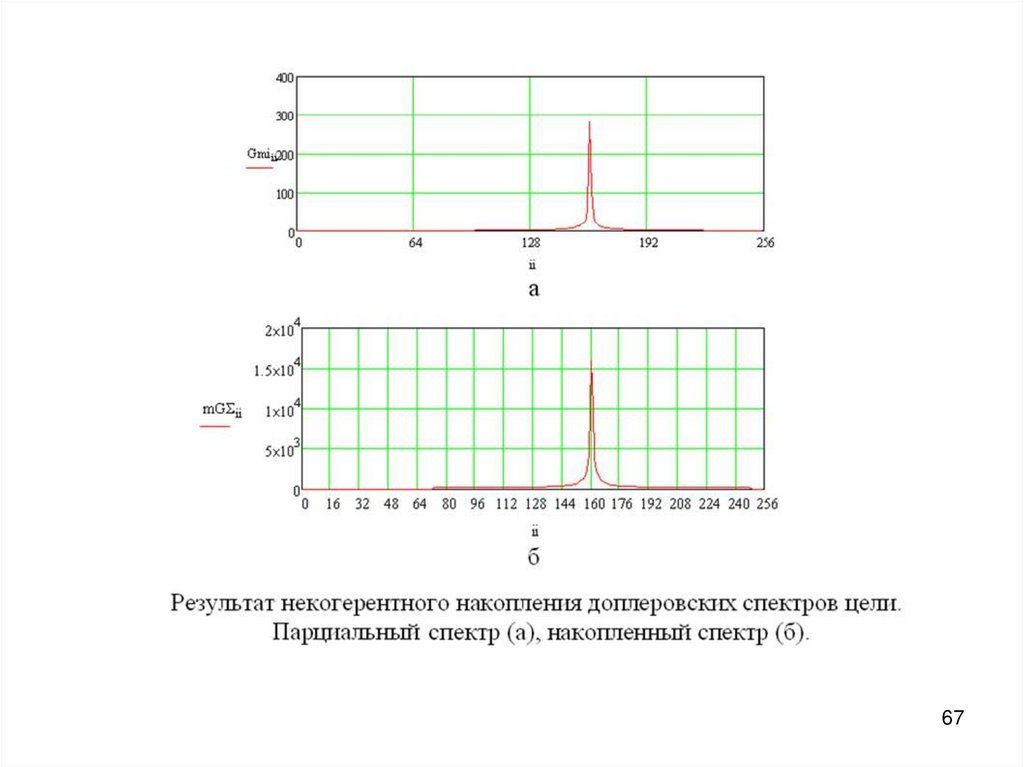
1-й Этап. Некогерентное накопление спектров
(по всем доплеровским интервалам неоднозначности
и парам передатчик-приемник):
f0
Nr
G f
m2
k 0 m m1
g rec f mTr 1, k
б
а
Результаты некогерентного накопления по неоднозначным доплеровским интервалам
и всем 11 приемным позициям. Отношение с/ш на входе приемника 0 дБ (а), 6 дБ (б)
58
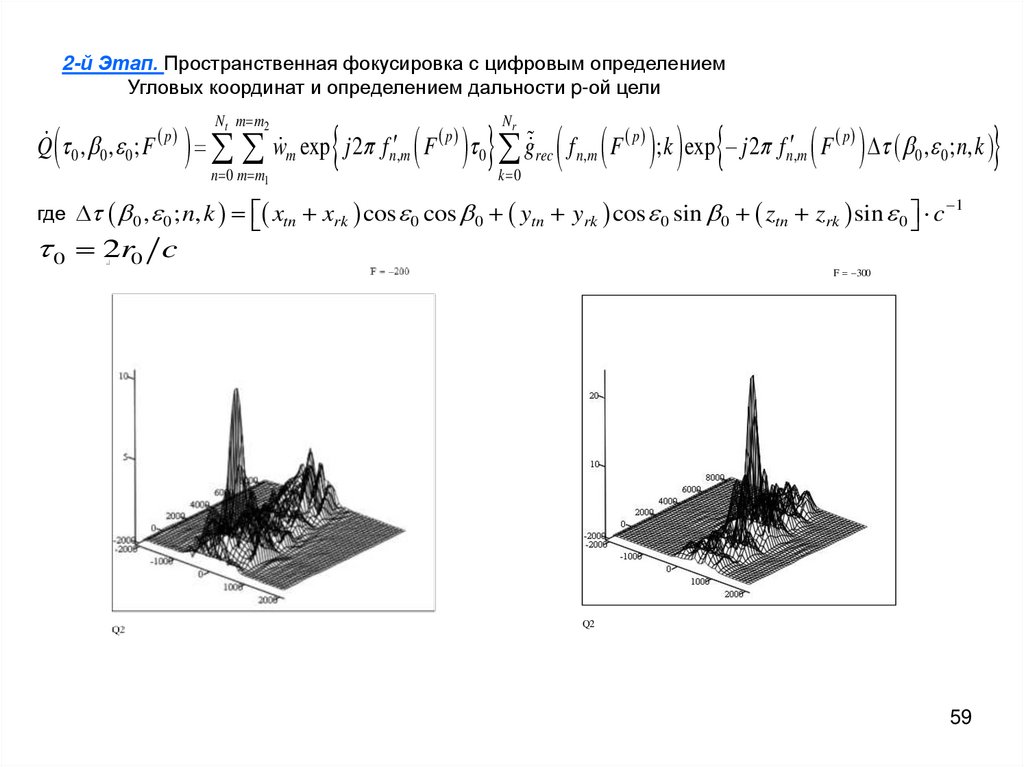
59.
2-й Этап. Пространственная фокусировка с цифровым определениемУгловых координат и определением дальности p-ой цели
Q 0 , 0 , 0 ; F
p
w exp j2 f F g f F ; k exp j2 f F , ; n, k
Nt m m2
n 0 m m1
Nr
p
m
n ,m
0
k 0
p
rec
n ,m
p
n ,m
0
0
где 0 , 0 ; n, k xtn xrk cos 0 cos 0 ytn yrk cos 0 sin 0 ztn zrk sin 0 c
0 2r0 c
1
F 300
Q2
59
60.
2. Обобщенный корреляционный алгоритм ПВ обработкиНефиксированный строб задержки:
N r Nt
I
k 0 n 0
i 0
Q r0 , 0 exp j n r0 ; n, k exp j n 0 iTr
srec t ; k exp j nt A t r0 ; n, k 1 0 0 iTr dt
Обработка в фиксированных стробах задержки:
N r Nt
I
k 0 n 0
i 0
Qm r0 , 0 exp j n r0 ; n, k exp j n 0 iTr
srec t ; k exp j nt A t m c iTr dt
m 0,1,2,...
Поэтапная детализация ПВ обработки в фиксированных стробах:
m
Ui
n, k
m c iTr u
srec t ; k exp j nt A t m c iTr dt
m c iTr
I
G n,k n 0 ; m U i m n, k exp j n 0 iTr
i 0
N r Nt
Qm r0 , 0 exp j n r0 ; n, k Gn,k n 0 ; m
k 0 n 0
60
61.
Общая часть структурной схемы системы обработкиNr
K
0
Ф1
УВЧ
ПРЕСЕЛ
f гет1
f гет
2
n
ПФ-0
…
ПФ-n
…
ПФ-Nt
И
…
И
…
И
Строб
m c iTr
I 1 N r 1
i 0,..., I
(0)
I 1 N r 1
I 1 N r 1
(n)
( Nt )
Преобразование, разделение, стробирование и внутриимпульсное накопление
частотных компонент в приемных каналах ПМ РЛС
61
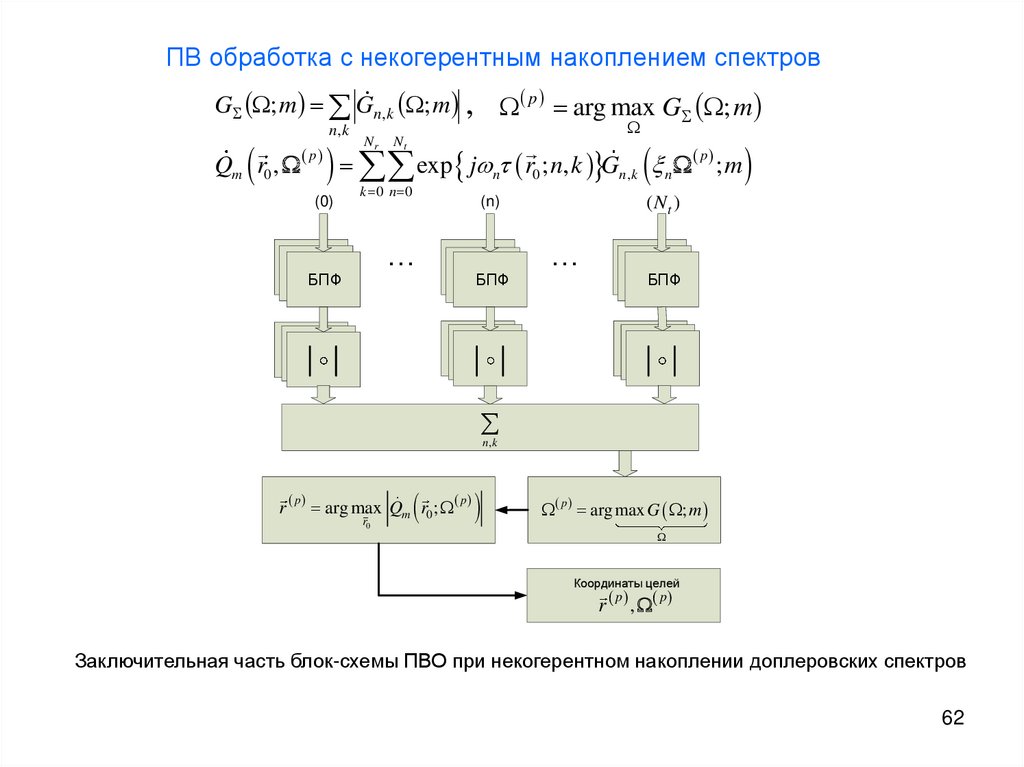
62.
ПВ обработка с некогерентным накоплением спектровG ; m G n,k ; m ,
n, k
Qm r0 ,
p
p arg max G ; m
exp j r ; n, k G ; m
(0)
Nr
Nt
p
n
k 0 n 0
n ,k
(n)
…
БПФ
0
БПФ
n
( Nt )
…
БПФ
n ,k
p
p
r arg max Qm r0 ;
r0
p
arg max G ; m
Координаты целей
p
p
r ,
Заключительная часть блок-схемы ПВО при некогерентном накоплении доплеровских спектров
62
63.
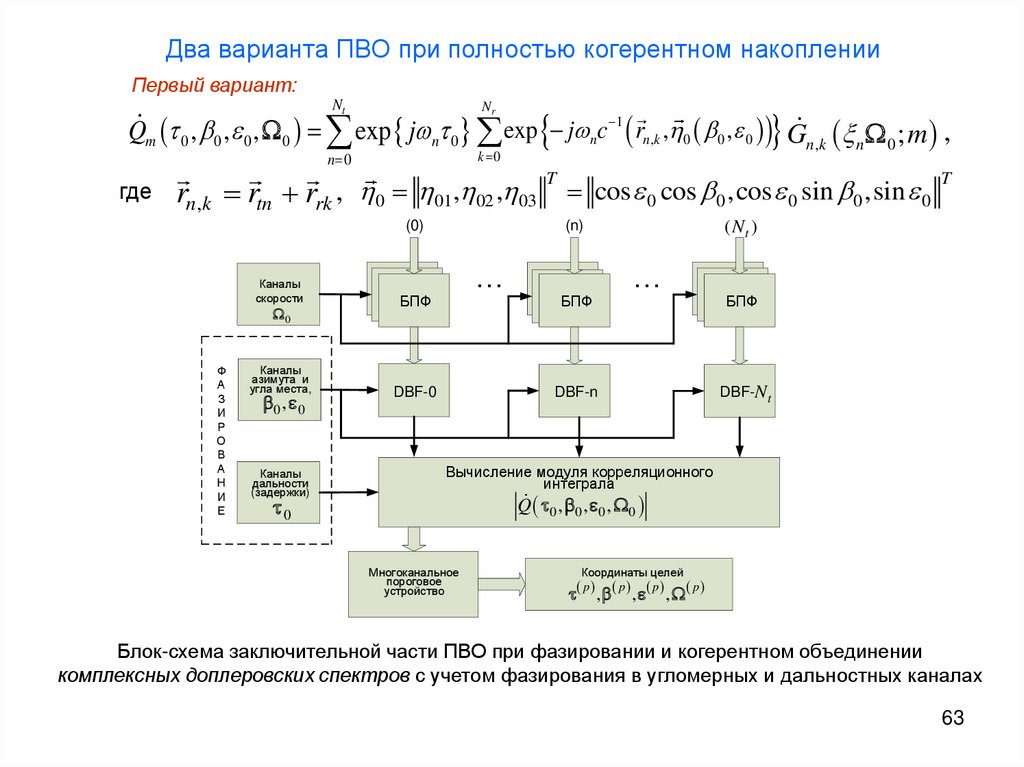
Два варианта ПВО при полностью когерентном накопленииПервый вариант:
Nt
Nr
n 0
k 0
Qm 0 , 0 , 0 , 0 exp j n 0 exp j nc 1 rn,k , 0 0 , 0 Gn,k n 0 ; m ,
где
T
rn,k rtn rrk , 0 01, 02 , 03 cos 0 cos 0 ,cos 0 sin 0 ,sin 0
(0)
Каналы
скорости
БПФ
Каналы
азимута и
угла места,
DBF-0
0
Ф
А
З
И
Р
О
В
А
Н
И
Е
0 , 0
Каналы
дальности
(задержки)
(n)
…
T
( Nt )
…
БПФ
DBF-n
БПФ
DBF-N t
Вычисление модуля корреляционного
интеграла
Q 0 , 0 , 0 , 0
0
Многоканальное
пороговое
устройство
Координаты целей
p
p
p
p
, , ,
Блок-схема заключительной части ПВО при фазировании и когерентном объединении
комплексных доплеровских спектров с учетом фазирования в угломерных и дальностных каналах
63
64.
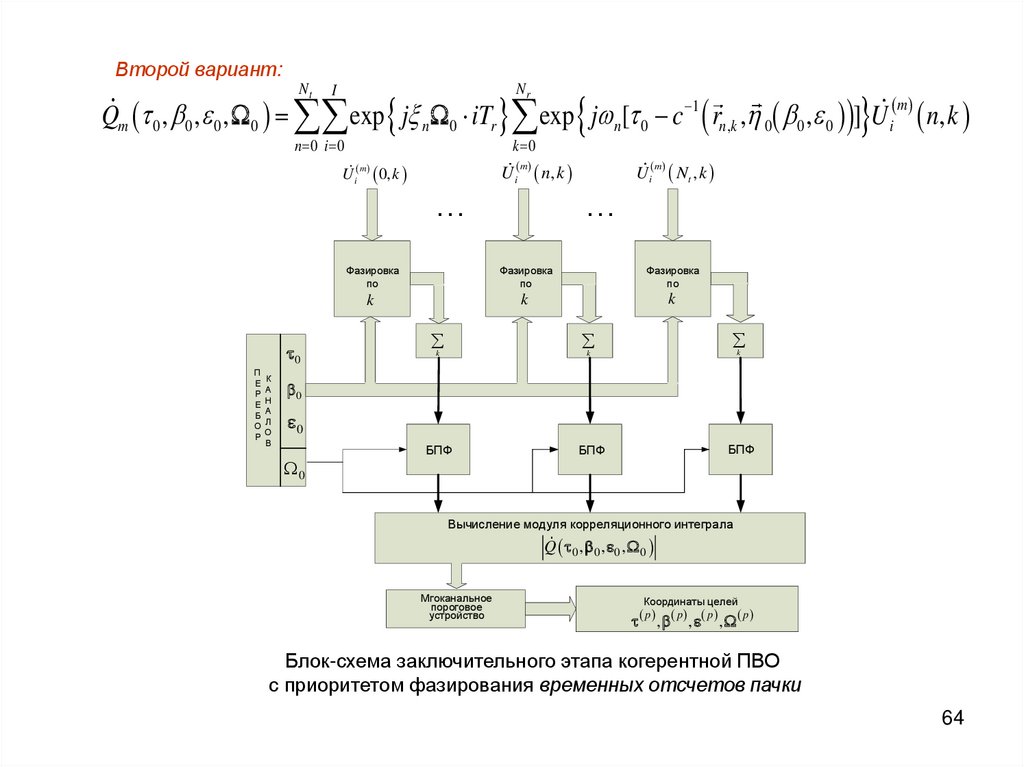
Второй вариант:Nt
Qm 0 , 0 , 0 , 0 exp j n 0 iTr exp j n [ 0 c 1 rn,k , 0 0 , 0 ] U i
Nr
I
n 0 i 0
k 0
U i
m
U i
0, k
m
n, k
…
0
П
Е
Р
Е
Б
О
Р
К
А
Н
А
Л
О
В
U i
m
m
n, k
Nt , k
…
Фазировка
по
Фазировка
по
Фазировка
по
k
k
k
k
k
k
0
0
0
БПФ
БПФ
БПФ
Вычисление модуля корреляционного интеграла
Q 0 , 0 , 0 , 0
Мгоканальное
пороговое
устройство
Координаты целей
p
p
p
p
, , ,
Блок-схема заключительного этапа когерентной ПВО
с приоритетом фазирования временных отсчетов пачки
64
65.
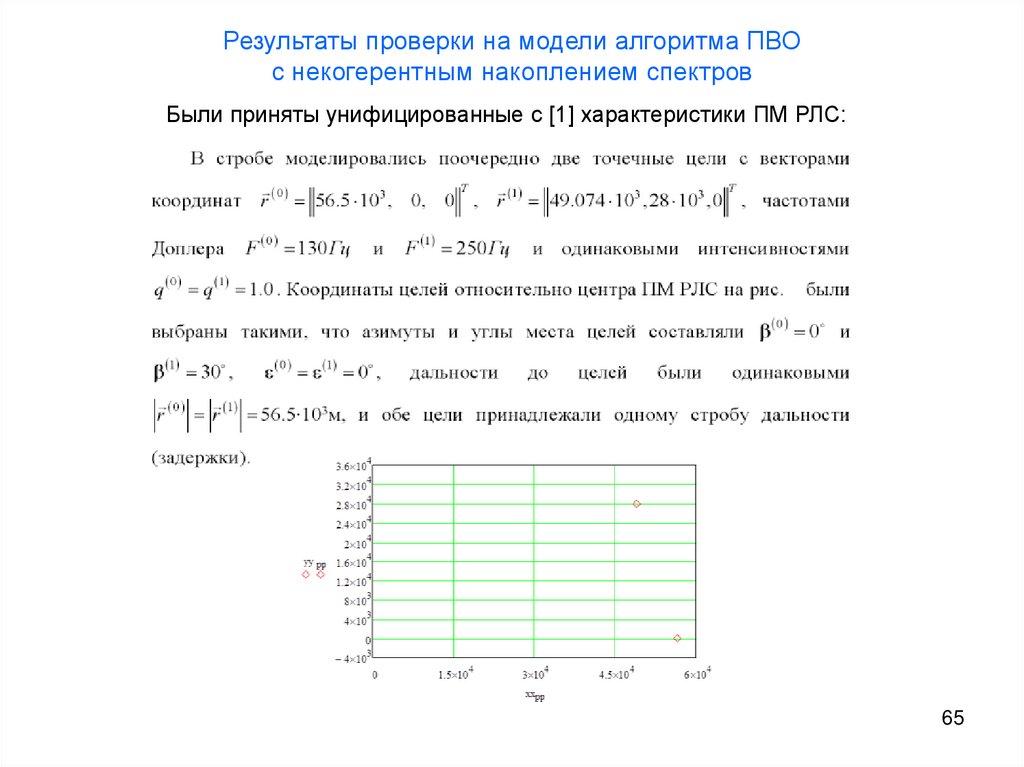
Результаты проверки на модели алгоритма ПВОс некогерентным накоплением спектров
Были приняты унифицированные с [1] характеристики ПМ РЛС:
65
66.
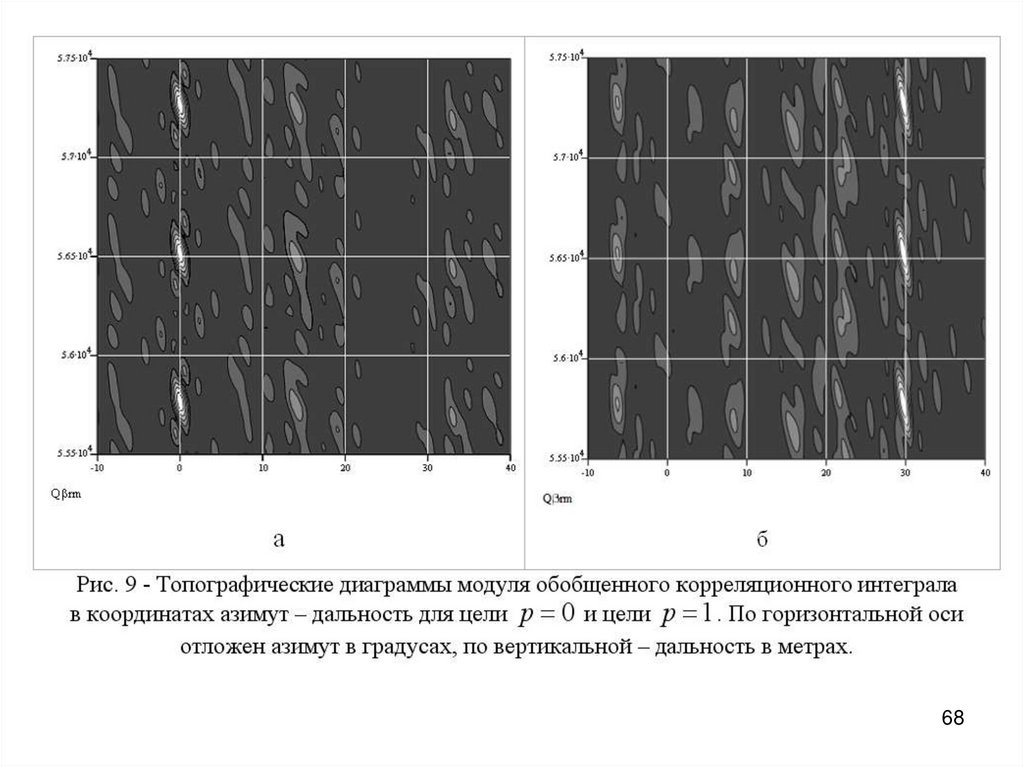
6667.
6768.
6869.
Цитированные работы1. Чапурский В.В. Получение радиоголографичских изображений объектов на основе разреженных антенных решеток типа MIMO с
одночастотным и многочастотным излучением. Вып. 4(85). 2011г. С. 72-91.
2. Чапурский В.В. Синтезирование радиоизображений объектов с помощью линейной антенной решетки типа MIMO. Вестник МГТУ
им. Н.Э. Баумана. Сер. «Приборостроение». Спец. выпуск. №7. Радиооптические технологии в приборостроении. 2012г. С.115-123.
3. Разевиг В.В., Бугаев А.С., Чапурский В.В. Сравнительный анализ фокусировки классических и мультистатических
радиоголограмм. Радиотехника, № 8, 2013г., с. 8- 17.
4. Крайний В.И., Семенов А.Н., Чапурский В.В. Фокусировка одночастотных мультистатических радиоголограмм методом не
эквидистантного быстрого преобразования Фурье. VIII Всероссийская НТК «Радиолокация и радиосвязь». Доклады. М., 24-26
ноября 2014г. С. 77-81.
5. J. Dorey, G. Garnier et G. Auvray, “RIAS, radar a impulsion et antenne syntetique”, Colloque International sur le Radar. Paris, april,
1989, pp.556-562.
6. Кучеров Ю.С., Чапурский В.В. Антенные решетки со сверхбыстрым сканированием луча. Радиотехника и электроника. 1994, с.
1562- 1569
7. M. Lesturgie, J. P. Eglizeaud, G. Auffray, D. Muller, B. Oliver, C. Delhote. The last decades and the future of low frequency radar
concepts in France. International Conference on Radar Systems- RADAR 2004, 18 - 22 October 2004 - Toulouse, France.
8. Chen Baixiao, Zhang Shouhong, Wang Yajun, Wang Jun, “Analysis and Experimental Results on Sparse-array Synthetic Impulse and
aperture Radar”, Proceedings of International Radar Conference , Beijing, China, October 2001, pp. 76-80.
9. Вовшин Б.М. Сверхширокополосные радиолокационные системы. Новый подход к принципам построения. Труды Юбилейной
НТК, посвященной 30-летию образования ЦНИИРЭС, 12-14 сентября 2001г., часть 1, Москва 2001, с.139-149.
10. Слукин Г.П., Чапурский В.В. Пространственно многоканальные РЛС большой дальности с высокой разрешающей
способностью. Радиотехника. Вып. 11, 2013. С. 24-34.
11. Вовшин Б.М., Свердлов Б.Г. Теоретические и экспериментальные исследования сверхширокополосных радиолокационных
систем с ортогональными зондирующими сигналами. Труды 1-го международного форума «Прикладная радиоэлектроника.
Состояние и перспективы развития», МРФ-2002, 8 - 10 октября 2002. Харьков. С. 62 - 64.
12. Свердлов Б. Г., Чапурский В.В. Развитие методов и технологии MIMO радиолокации для обнаружения малозаметных и
малоподвижных объектов. Результаты ориентированных фундаментальных исследований и их использование в развитии
Российской радиоэлектроники. Труды IV конференции РФФИ. КНИИТМУ, Калуга, 2009. С.155-169.
13. В.В. Чапурский. Обработка сигналов в многочастотных радиолокационных системах с антеннами из пространственно
распределенных передающих и приемных элементов. Вестник МГТУ им. Н.Э. Баумана. Сер. «Приборостроение». Вып. 3(72),
2008г. С.69-79.
14. Chapursky V.V., Ivashov S.I., Vasiliev I.A., Zhuravlev A.V. Short Range Radar with MIMO Antenna System and Multifrequency
Sounding Signal. Progress in Electromagnetics Research Symposium, PIERS-2009, Moscow, Russia, August 18-21.- 2009.
69
70.
15. Крючков И. В., Нефедов С.И., Нониашвили М.И., Чапурский В.В. Обобщенные функции неопределенности пространственномногоканальных РЛС с узконаправленными диаграммами направленности передающих и приемных элементов. Радиотехника,
№ 11, 2013г., с. 14- 23.
16. Лоскутов В.Ю., Слукин Г.П., Чапурский В.В. Спектральный метод обработки сигналов в пространственно многоканальных
РЛС. Радиотехника, № 11, 2013г., с. 39- 49.
17. Крючков И. В., Чапурский В.В. Структура систем корреляционной пространственно-временной обработки сигналов в
многочастотных пространственно-многоканальных РЛС. Успехи современной радиоэлектроники. Вып.7, 2014. С. 3 - 13.
Дополнительная литература по теме
18. Rabideau D.J, Parker P.A. Ubiquitous MIMO Multifunction Digital Array Radar and the Role of Time-Energy Management in Radar.
Project Report DAR-4. Lincoln Laboratory Massachusetts Institute of Technology, 2004.
19. Черняк В.С. О новых и старых идеях в радиолокации: MIMO РЛС. Успехи современной радиоэлектроники. Вып.2, 2011.
С. 5-20.
20. Черняк В.С. Обнаружение сигналов в MIMO РЛС. Успехи современной радиоэлектроники. Вып.7, 2014. С. 35 - 49.
21. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь. 1993.
22. Чапурский В.В. Избранные задачи теории сверхширокополосных радиолокационных систем. Изд-во МГТУ
им. Н.Э. Баумана. М., 2012.
23. Вовшин Б.М. Сверхширокополосная радиолокация воздушных объектов с безынерционным обзором пространства.
Докторская диссертация. ЗАО «радиоэлектронных систем». М., 2005г.
70
71.
ЗАКЛЮЧЕНИЕ1. Использование принципов MIMO в радиоголографии приводит к новой ее разновидности, которую
можно охарактеризовать как мультистатическую радиоголографию (МРГ).
2. Применение МРГ оказалось эффективным в связи с возможностью использования разреженных
АР с уменьшением, примерно на порядок - для линейных сканирующих АР и на два порядка - для
двумерных АР, числа элементов по сравнению с классической радиоголографией (КРГ) при
сохранении качества фокусировки радиоизображений (РИ).
3. На основе результатов моделирования при наблюдении сложных многоточечных плоских и
пространственных объектов показано, что метод одночастотных МРГ позволяет получить
удовлетворительное качество РИ не только в мм диапазоне волн, но и в см диапазоне, несмотря на
сугубо разреженный характер и малое число элементов АР. Дальнейшее улучшение качества РИ, в
особенности трехмерных, достигается в многочастотном варианте МРГ.
4. Резкое снижение числа элементов в методе МРГ по сравнению с КРГ при одинаковом качестве РИ
в принципе снимает остроту проблемы реализации электронного обзора (без механического
сканирования), сопряженную с нереализуемо большим числом элементов в неподвижных АР при
методе КРГ.
5. Известным вариантом фокусировки РИ в МРГ является метод обратных проекций, требующий,
особенно в многочастотном случае, значительных вычислительных затрат. Перспективным в плане
уменьшения времени вычислений в системам с МРГ является метод не эквидистантного БПФ
(НБПФ). На конкретном примере одночастотной МРГ и приемо-передающей АР с числом элементов
81+81 установлено сокращение времени фокусировки методом НБПФ более чем на два порядка по
сравнению с методом обратных проекций.
71
72.
6. Дан обзор существующих разработок в области ПМ РЛС типа MIMO и некоторых МП РЛС.Рассмотрены некоторые особенности РЛ систем RIAS, Nosterdamus и Graves. Представлены
также предварительные проектные данные по РЛС обзора летного поля на принципах MIMO и
возможный принцип построения пространственно распределенной MIMO РЛ системы с
узконаправленными управляемыми ФАР.
7. Приведен пример сравнения дальности обнаружения для MIMO РЛС типа RIAS в разных
диапазонах волн при одинаковых ЭОП цели, средней мощности, разрешающей способности и
угловой зоне обзора. Установлено, что СШП MIMO РЛС с многочастотным сигналом в
диапазоне от 0,25 ГГц до 1,25 ГГц имеет дальность обнаружения 1500км, а MIMO РЛС в
диапазонах 3 ГГЦ и 10 ГГц уступают ей в дальности соответственно ~2 раза и ~3,6 раза.
8. Рассмотрены методы пространственно-спектральной и пространственно-временной
обработки сигналов, в последнем варианте – с предварительным стробированием принятых
многочастотных импульсов пачки по задержке на выходах приемных каналов АС в MIMO РЛС.
9. Представлены три варианта систем обработки: 1) с приоритетом полной спектральной
обработки, некогерентным накоплением доплеровских спектров при известных потерях и
последующей фокусировкой по пространственным координатам; для случая стробирования
импульсов пачки получены 2) алгоритм на основе приоритета доплеровской обработки в
стробах с когерентным накоплением спектров при многоканальном фазировании по углам и
Дальности; 3) на основе приоритета временной обработки с фазированием комплексных
амплитуд каналов по углам и дальности с последующей доплеровской обработкой.
Моделирование варианта 1 подтвердило работоспособность данного алгоритма.
10. Для всех представленных вариантов обработки целесообразна разработка и применение
алгоритмов на основе НБПФ по пространственным координатам и, возможно по времени.
72
73.
Сравнение принципов МРГ и ПМ РЛС типа MIMOОсобенности систем МРГ.
1.Использование зондирующих сигналов с ортогональностью по времени или по частоте:
ВИС, КИС, СЧМ.
2.Цифровая обработка методом обратных проекций или не эквидистантного БПФ (НБПФ) в
случае неподвижных объектов .
3.Возможность цифровой фокусировки радиоизображений с задержкой по времени.
4.Применение неподвижных и механически сканирующих разреженных приемопередающих АР с неуправляемыми слабо направленными элементами .
Особенности ПМ РЛС типа MIMO.
1.Применение неподвижных сканирующих разреженных приемо-передающих
АР
с неуправляемыми слабо направленными элементами.
2.Принципиален учет скорости и наличия частоты Доплера целей.
3.Для увеличения потенциала возможно применение направленных электронно
управляемых ДНА элементов (или позиций отдельных РЛС в варианте MIMO РЛС
с узконаправленными АС типа ФАР).
4. Цифровая обработка методом обратных проекций или не эквидистантного БПФ (НБПФ)
на основе спектральных или корреляционных алгоритмов.
5. Возможность цифрового обзора пространства, требующая вычислений в РМВ
с применением НБПФ.
6.Применение неподвижных приемо-передающих
АР с неуправляемыми слабо
направленными элементами или электронно-управляемых ФАР в варианте MIMO РЛС
с узконаправленными АС.
7.Необходимость разработки методов подавления дифракционных побочных лепестков в
пределах эквивалентного пространственного луча в варианте MIMO РЛС
с узконаправленными АС.
73
74.
1.2.
3.
4.
5.
Области применения применения и преимущества принципов MIMO
в радиолокации
Создание РЛС большой дальности в низкочастотных диапазонах излучения
с высоким пространственным разрешением для обнаружения объектов с
противорадиолокационными покрытиями.
Создание СШП РЛС сверхмалой дальности для обнаружения людей за
радиопрозрачными препятствиями.
Разработка и создание нового поколения РЛС малой дальности для обзора
летного поля с неподвижными кольцевыми АР.
Возможность построения ПМ РЛС на основе неуправляемых разреженных
неподвижных АР и цифрового обзора пространства в цифровом процессоре
пространственно-временной обработки.
Применение методов MIMO в мобильных пространственно-распределенных
когерентных РЛС с узконаправленными управляемыми ФАР.
74