




 Программное обеспечение
Программное обеспечениеПохожие презентации:








. Подсистемы САПР ТП. (Лекция 2)")

Научно-исследовательская лаборатория Мехатроники и робототехники ОНАПТ
1. Научно-исследовательская лаборатория Мехатроники и робототехники ОНАПТ
www.robot.onaft.edu.uaНаучно-исследовательская
лаборатория Мехатроники и
робототехники ОНАПТ
2.
www.robot.onaft.edu.ua2/8
3.
• Интеграция теории автоматического управления в общей структурно –параметрической схеме БПЛА как объекта управления;
• Рассмотрение препятствий и порывов ветра как контролируемых переменных с
дальнейшей компенсацией их воздействия корректирующими связями;
• Проведение структурно – параметрической оптимизации схемы
автоматического управления БПЛА, с принятым квадратичным критерием
оптимальности от стабильности (совершенно новый критерий оптимальности);
D[ xi ] min
St
e
D[ xi ] max
x x
th
;
6
• Проверка полученной системы с ПИД регуляторами отдельно на тангаж, крен и
рыскание на робастность показала себя устойчивой даже при рассогласовании
параметров объекта управления на +/- 40%;
www.robot.onaft.edu.ua
3/8
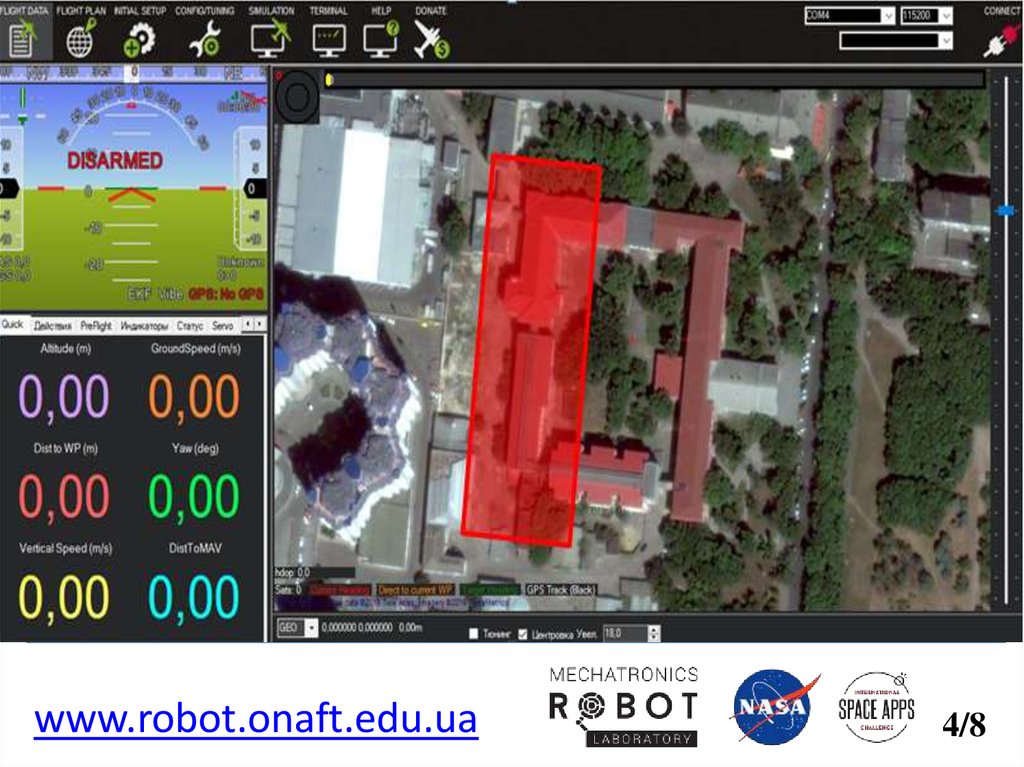
4.
www.robot.onaft.edu.ua4/8
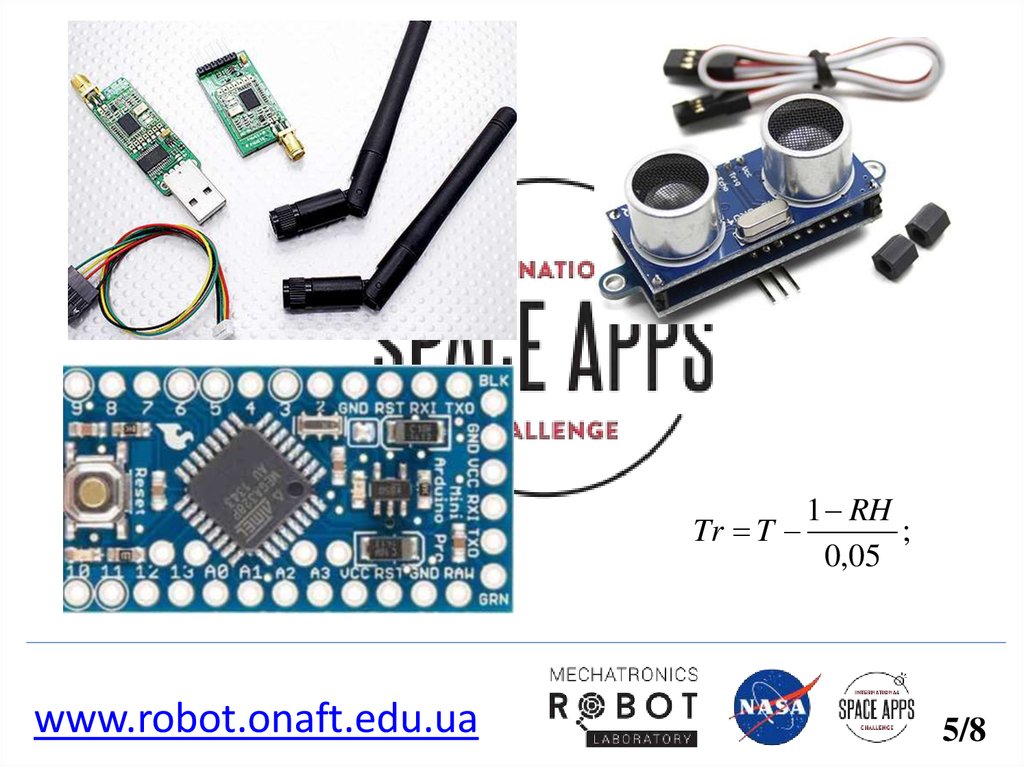
5.
Tr Twww.robot.onaft.edu.ua
1 RH
;
0,05
5/8
6.
www.robot.onaft.edu.ua6/8
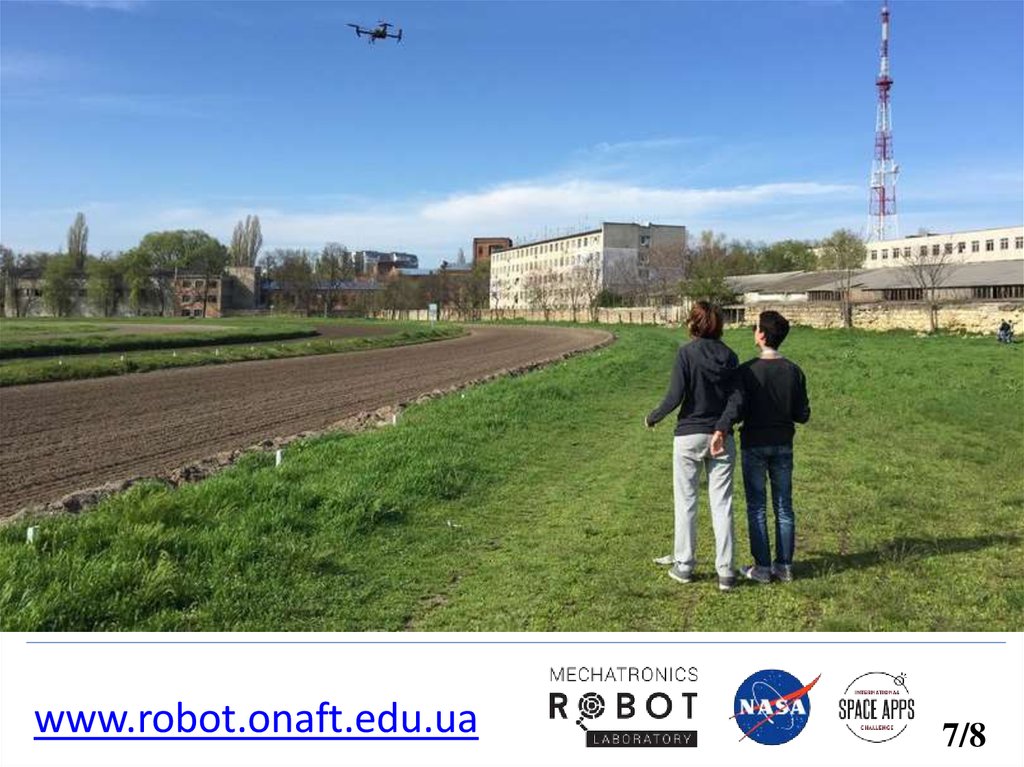
7.
www.robot.onaft.edu.ua7/8
8.
Спасибо за вниманиеwww.robot.onaft.edu.ua
8/8