

.")
















 Математика
МатематикаПохожие презентации:










Векторная алгебра. Понятия и определения
1.
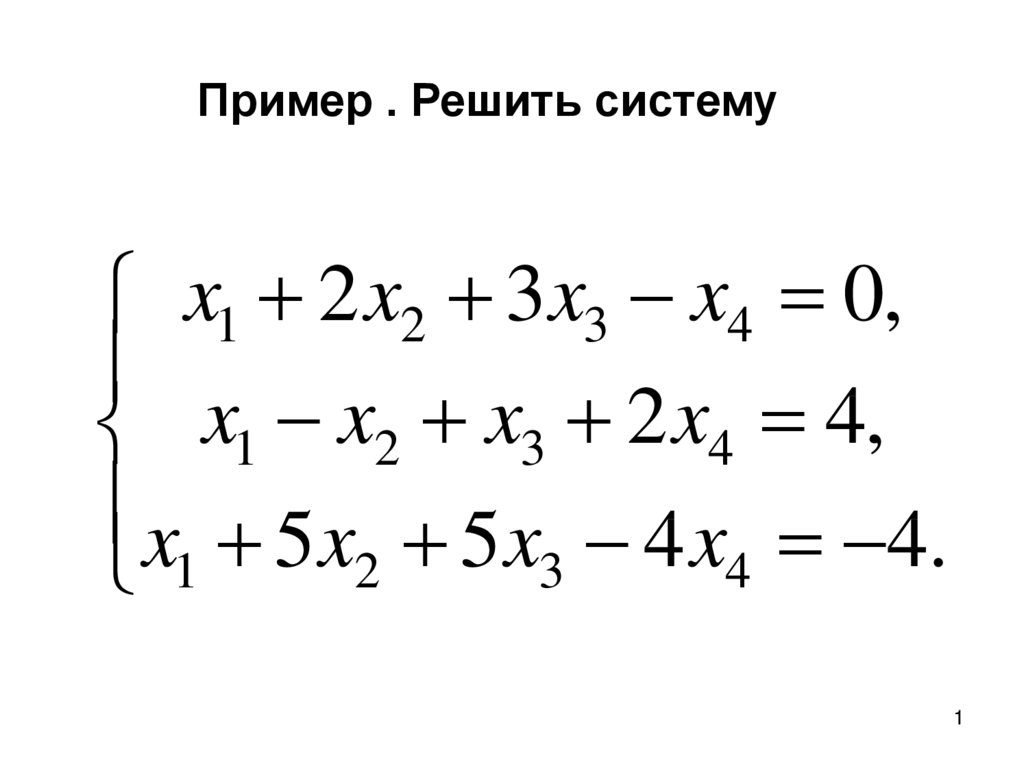
Пример . Решить системуx1 2 x2 3x3 x4 0,
x1 x2 x3 2 x4 4,
x 5 x 5 x 4 x 4.
2
3
4
1
1
2.
12 3
1
A 1 1 1
1
1
2
2 .
5 5 4
3
1 3 1
1 1 1 0,
1 1
1
1 5 4
5
5
1 2 1
1 1 2 0,
1
5
4
0,
2
1 2 3
1 1 1 0.
1
5
5
2
3.
12
1 1
1
1 2 3 0.
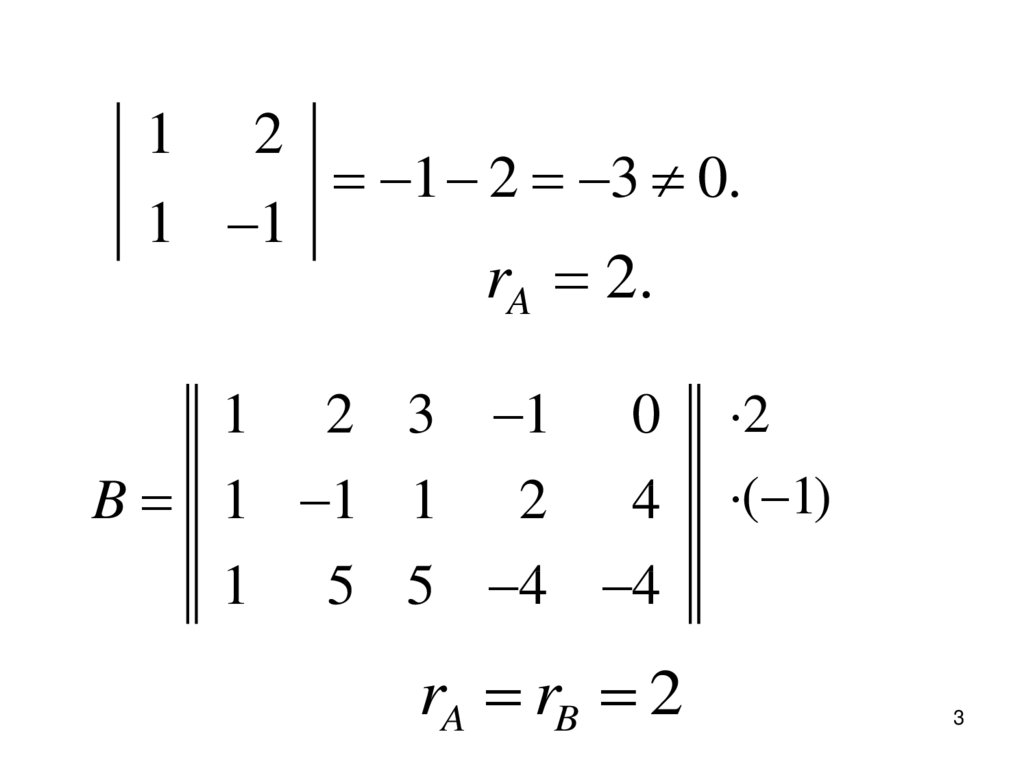
rA 2.
2 3 1
B 1 1 1
1
2
0
2
4
( 1)
5 5 4 4
rA rB 2
3
4.
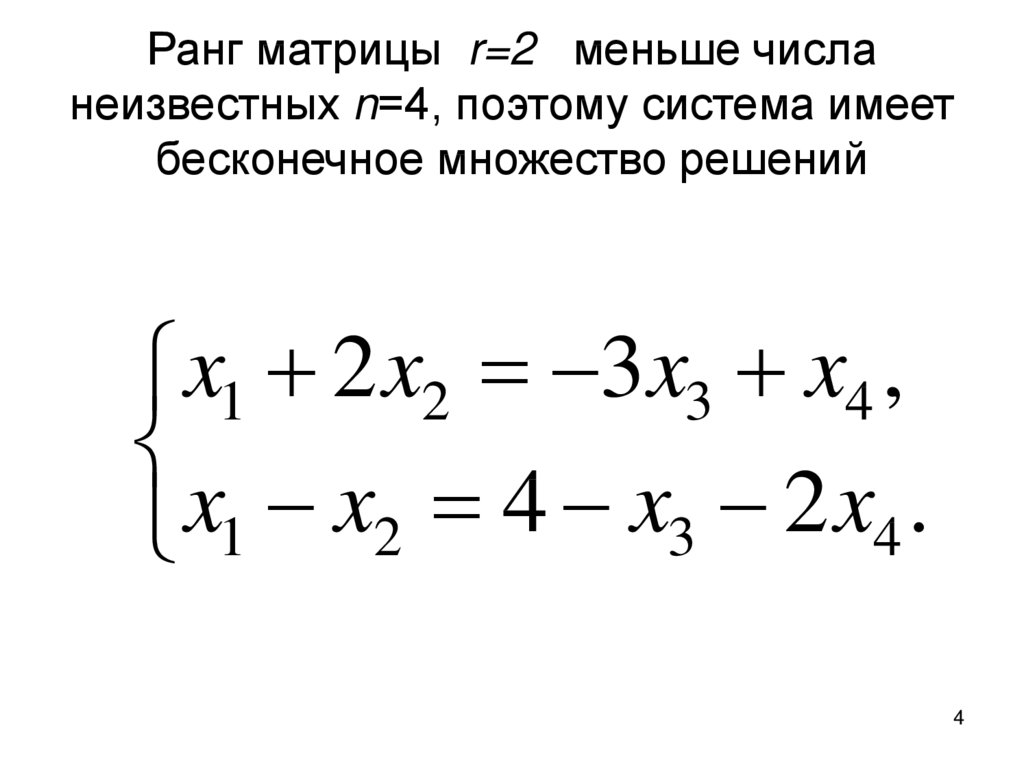
Ранг матрицы r=2 меньше числанеизвестных n=4, поэтому система имеет
бесконечное множество решений
x1 2 x2 3x3 x4 ,
x
x
4
x
2
x
.
3
4
1 2
4
5.
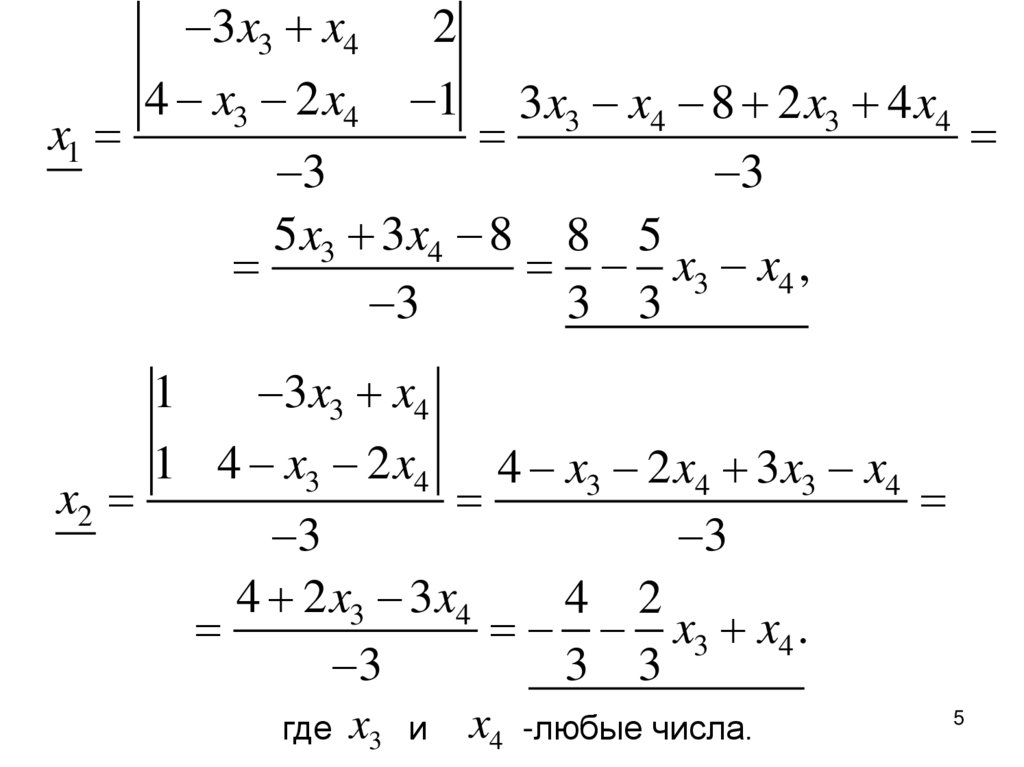
x1x2
3x3 x4
4 x3 2 x4
2
1
3x3 x4 8 2 x3 4 x4
3
3
5 x3 3x4 8 8 5
x3 x4 ,
3
3 3
1
3x3 x4
1 4 x3 2 x4
4 x3 2 x4 3x3 x4
3
3
4 2 x3 3 x4
4 2
x3 x4 .
3
3 3
5
где x3 и x4 -любые числа.
6. Пример. Решить систему уравнений
2 x 2 y z 3,4 x 5 z 19,
2 x y z 7
с помощью теоремы Крамера и с помощью
обратной матрицы
6
7. Решение (с помощью теоремы Крамера).
2 2 1D 4 0 5
2 1 1
2 1
1 2
4 5
3 2 2 1
0 1 1
2 1
4 5
2 1 6 0 1 1 14 12 0 14 2
D 0.
7
8.
3 2 1Dx 19 0 5
7
1
1
3 0 1 2 5 7 1 19 1 1 0 7 3 5 1 2 19 1
70 19 15 38 51 53 2;
2 3 1
Dy 4 19 5
2
7
1
2 19 1 3 5 2 4 7 1 1 19 2 3 4 1 2 5 7
38 30 28 38 12 70 68 10 82 4;
8
9. Проверка:
2 23
Dz 4 0 19
2 1 7
2 0 7 2 19 2 3 4 1 3 0 2 2 4 7 1 19 2
76 12 56 38 88 94 6.
x
2
2
1;
Проверка:
y
4
2
2;
z
2 1 2 2 3 3,
4 1 5 3 19,
2 1 2 3 7.
6
2
3.
9
10. С помощью обратной матрицы
2 2 1X
A 4 0
5
2 1
1
x
3
y
B 19
z
7
D( A) 0
1
X A B
10
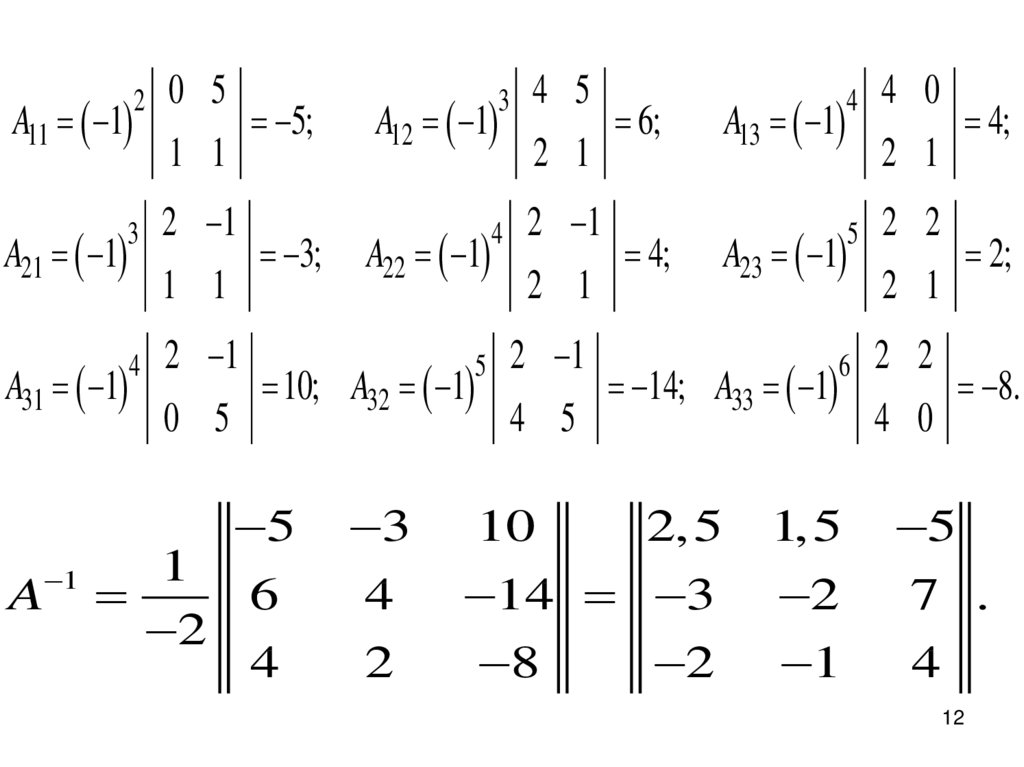
11.
1A
D( A)
1
A11
A21
A31
A12
A22
A32 ,
A13
A23
A33
2 2 1
D( A) 4 0
5
2 1
1
2
11
12.
A11 12
A21 1
3
A31 1
0 5
5;
1 1
2 1
1 1
4
2 1
0 5
3;
A
A13 1
A22 1
2 1
A23 1
2 2
14; A33 1
2 2
10; A32 1
5
1
A12 1
4 5
6;
2 1
3
1
6
2
4
5
3
4
2
4
2 1
2 1
4 5
10
4;
4
5
6
4 0
4;
2 1
2;
2 1
8.
4 0
5
2,5
1,5
14 3
2
7 .
1
4
8
2
12
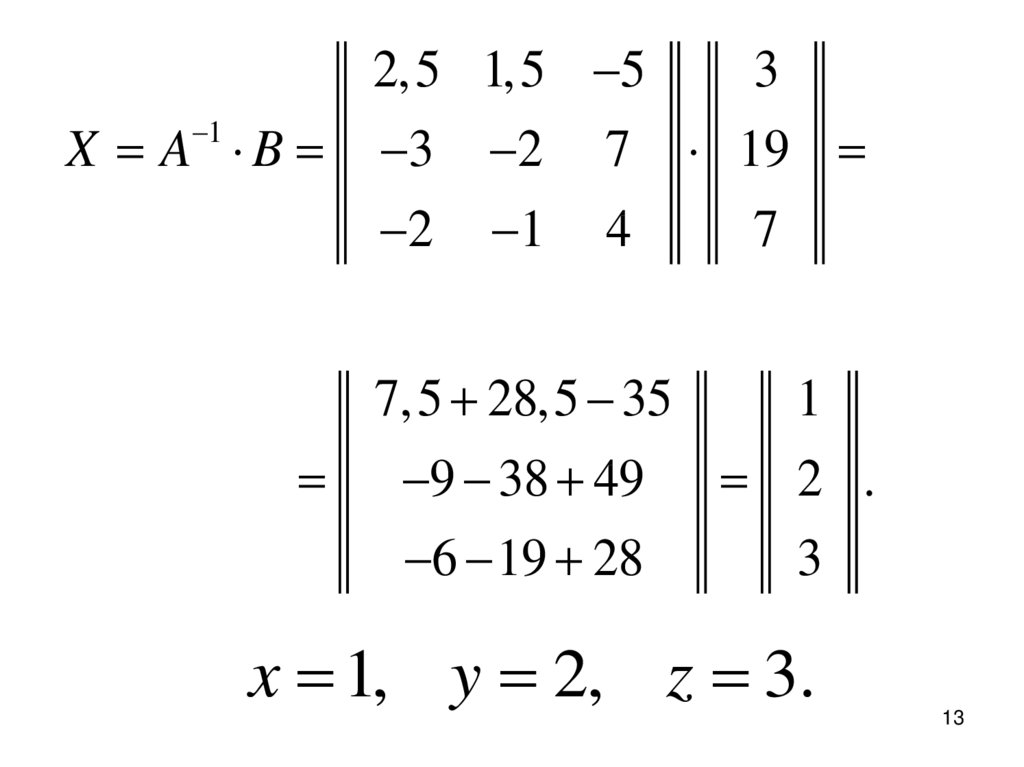
13.
2,5 1,5 51
X A B
3
3
2
7
19
2
1
4
7
7,5 28,5 35
1
9 38 49
2 .
6 19 28
3
x 1, y 2, z 3.
13
14.
ГЛАВА 2.Основы векторной алгебры
§1. Основные понятия и определения
Вектором называется направленный
отрезок, началом которого является точка A,
а концом точка B . Он обозначается
AB или a.
B
a
A
14
15.
Длиной или модулем вектора ABназывается длина отрезка AB.Она
обозначается
символом AB или | a |.
Cвободными называются векторы, которые можно переносить параллельно самим
себе и откладывать от произвольной точки.
Нулевым называется вектор, начало и
конец которого совпадают.
Нулевой вектор
обозначается символом 0 , он не имеет
определенного направления, его длина
равна нулю.
Единичным вектором называется такой
вектор, длина которого равна единице в
15
выбранном масштабе.
16.
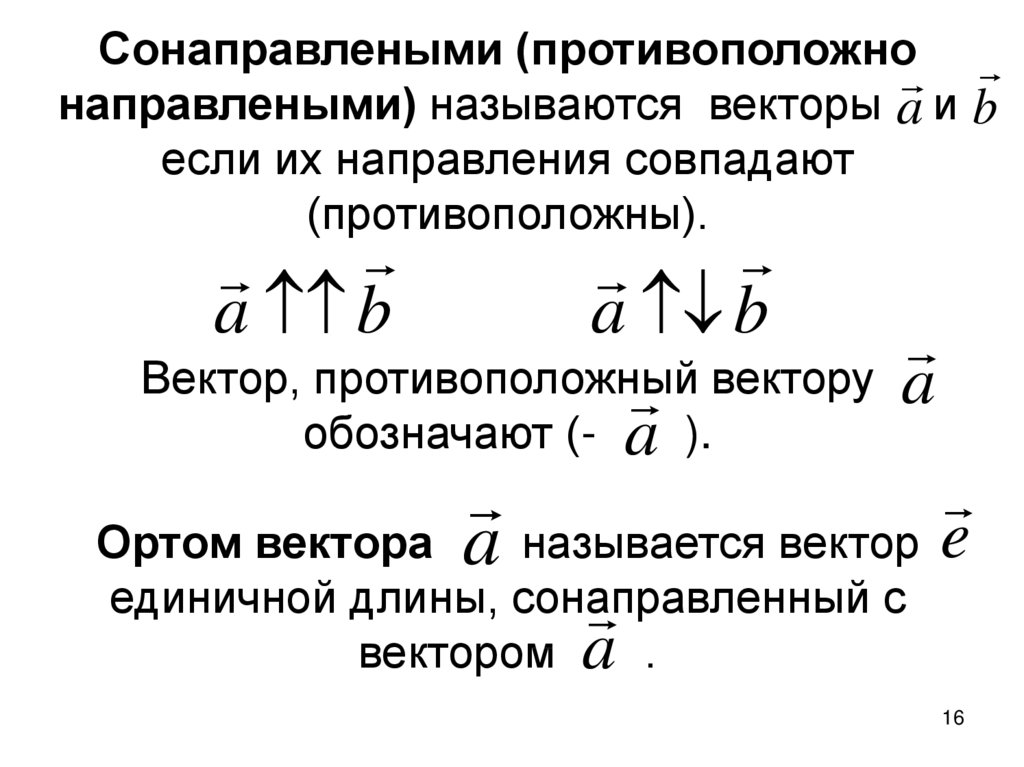
Сонаправлеными (противоположнонаправлеными) называются векторы a и b
если их направления совпадают
(противоположны).
a b
a b
Вектор, противоположный
вектору a
обозначают (- a ).
a называется вектор e
Ортом вектора
единичной длины, сонаправленный
с
вектором a .
16
17.
Коллинеарными называются векторыпараллельные одной и той же прямой.
Компланарными называются векторы
параллельные одной и той же
плоскости.
Равными называются векторы,
имеющие одинаковую длину и
одинаковое направление.
17
18.
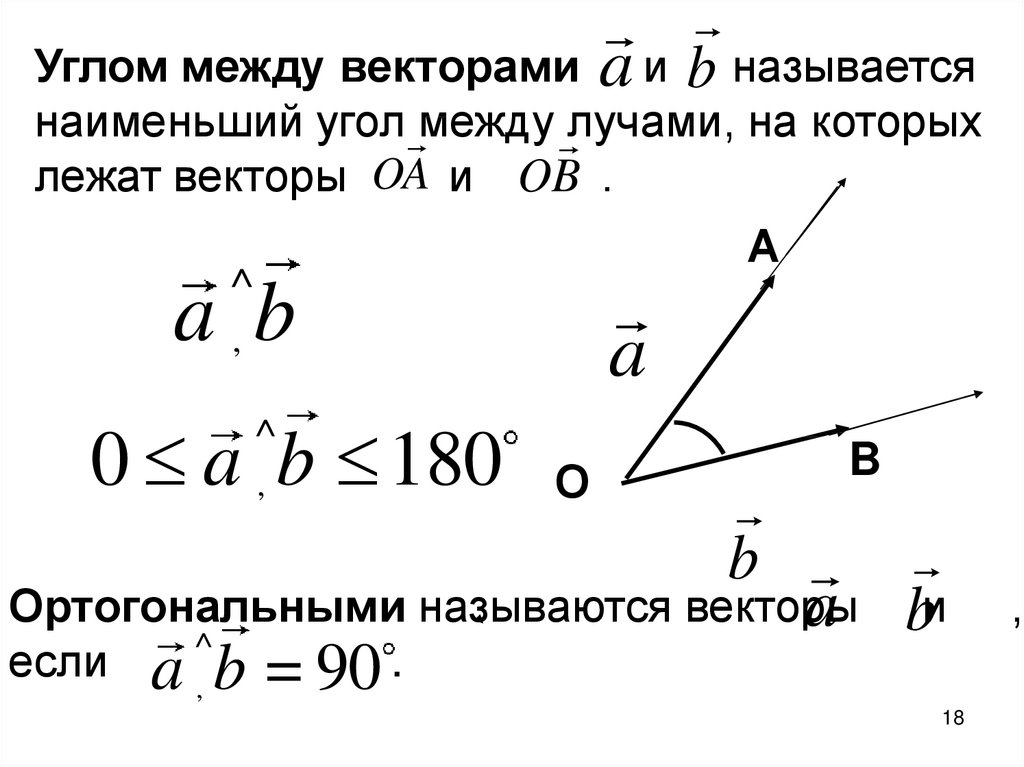
Углом между векторами a и b называетсянаименьший угол между лучами, на которых
лежат векторы OA и OB .
a
^
a ,b
0 a , b 180
^
О
А
b
B
Ортогональными называются векторы
a
если a ^, b = 90 .
bи
18
,
19.
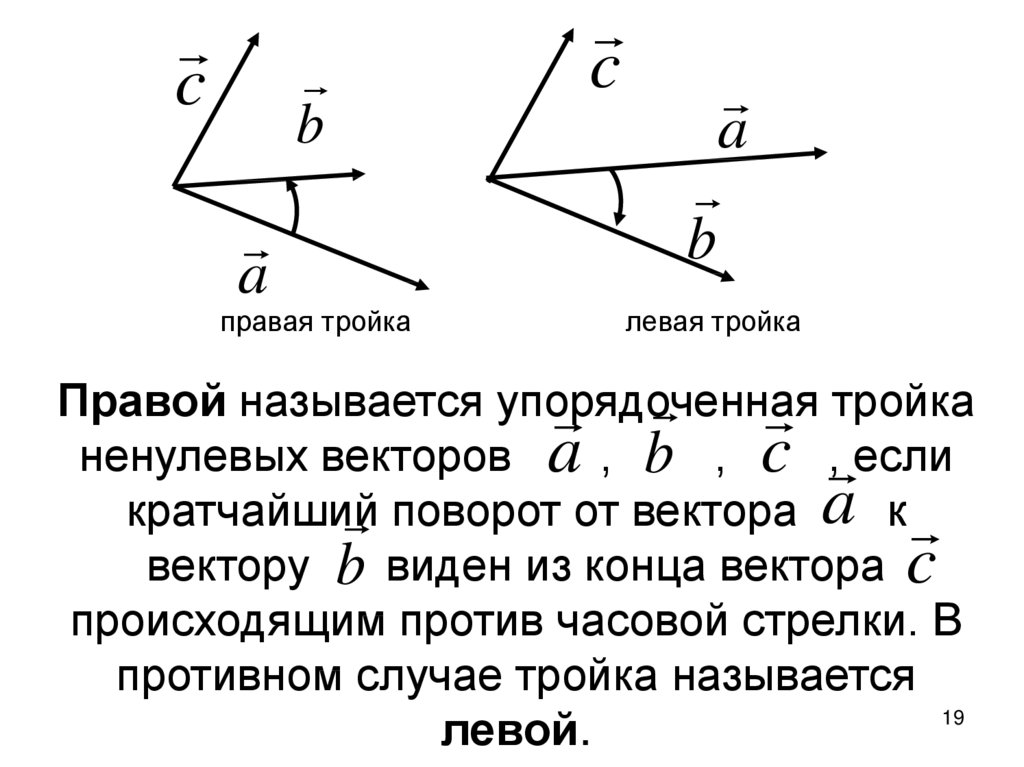
cb
a
правая тройка
c
a
b
левая тройка
Правой называется упорядоченная
тройка
ненулевых векторов a , b , c , если
кратчайший
поворот от вектора a к
вектору b виден из конца вектора c
происходящим против часовой стрелки. В
противном случае тройка называется
19
левой.
20.
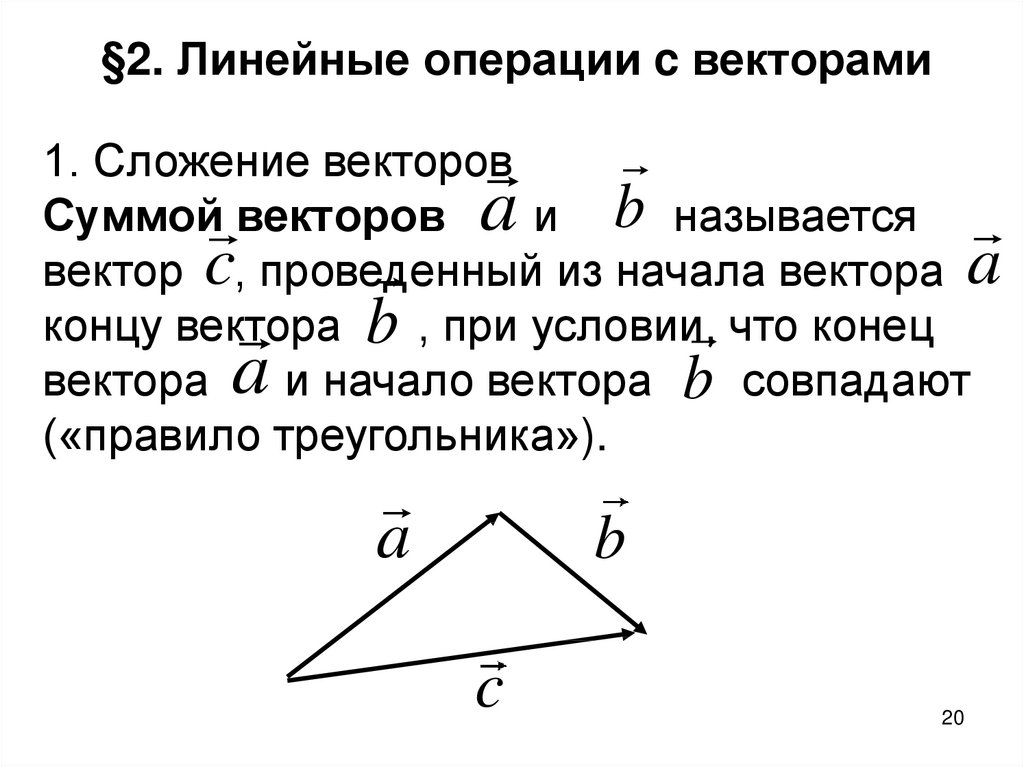
§2. Линейные операции c векторами1. Сложение векторов
Суммой векторов
и b называется
вектор c, проведенный
из начала вектора a
концу вектора b , при условии,
что конец
вектора
и начало вектора b совпадают
(«правило треугольника»).
a
a
a
b
c
20
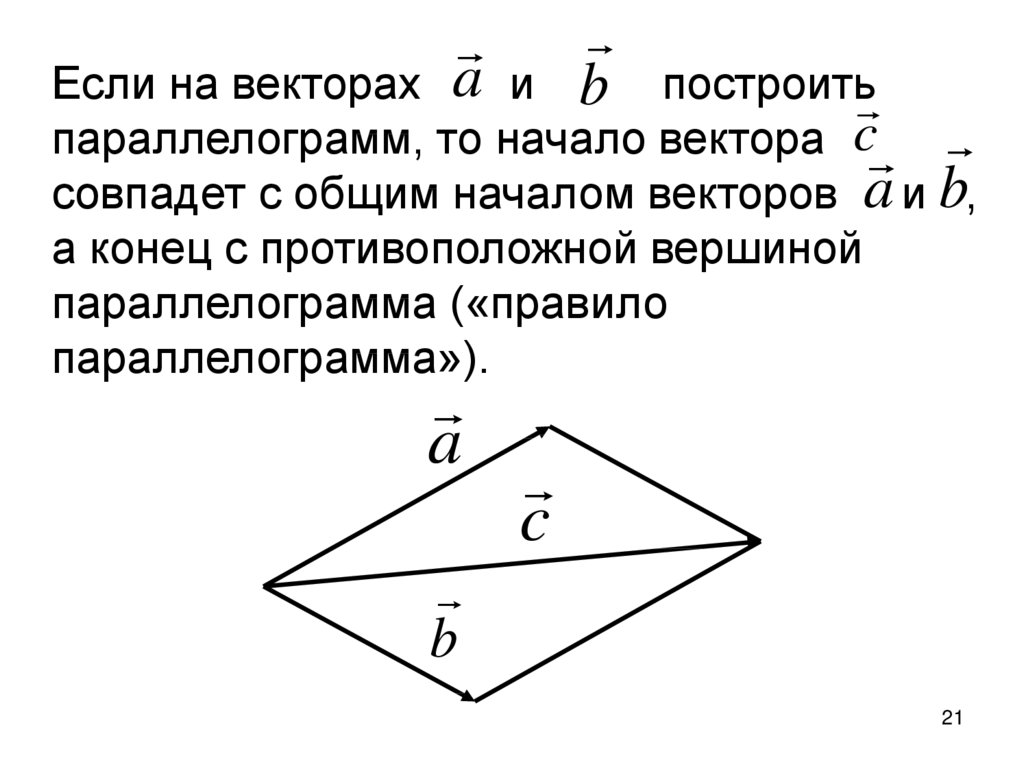
21.
ab
Если на векторах
и
построить
параллелограмм, то начало вектора c
совпадет с общим началом векторов a и b,
а конец с противоположной вершиной
параллелограмма («правило
параллелограмма»).
a
c
b
21
22.
Свойства операции сложения векторов:1.
a b = b a
( коммутативность),
(a b ) c = a (b c )
2.
(ассоциативность),
3.
4.
a 0 = a
a ( a ) = 0
(поглощение нуля),
.
22
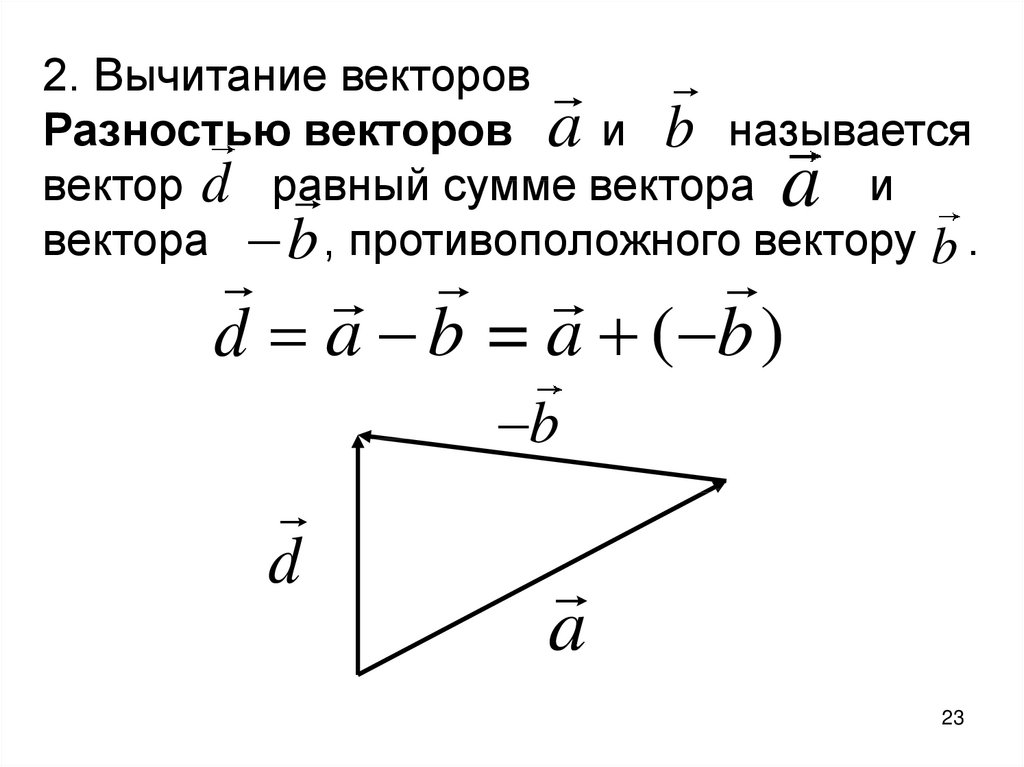
23.
2. Вычитание векторовРазностью векторов a и b называется
вектор d равный
сумме вектора
и
вектора b , противоположного вектору b .
a
d a b = a ( b )
b
d
a
23
24.
3. Умножение вектора на число.aна
Произведением ненулевого вектора
число
0называется вектор,
длина
которого равна
| | при
| aэтом
|
сонаправленный с
, если
>и 0
a
противоположно направленный, если <
Если 0 или a 0 , то
произведение считается нулевым
вектором. Произведение вектора
a на
число обозначается a .
24
0.
25.
Свойства операции умножения векторана число:
1. ( )a = a a
(дистрибутивность относительно сложения
чисел),
2. ( a b ) = a b
(дистрибутивность относительно сложения
векторов),
3. ( a ) = ( )a (ассоциативность
относительно числового множителя),
4.
1 a = a
(умножение на единицу).
25
26.
Проекции вектораОсью называется прямая, на
которой выбрано одно из двух
возможных направлений,
зафиксирована точка, называемая
началом, и выбран масштаб для
измерения длин. Выбранное
направление на оси удобно
задавать с помощью орта e .
26
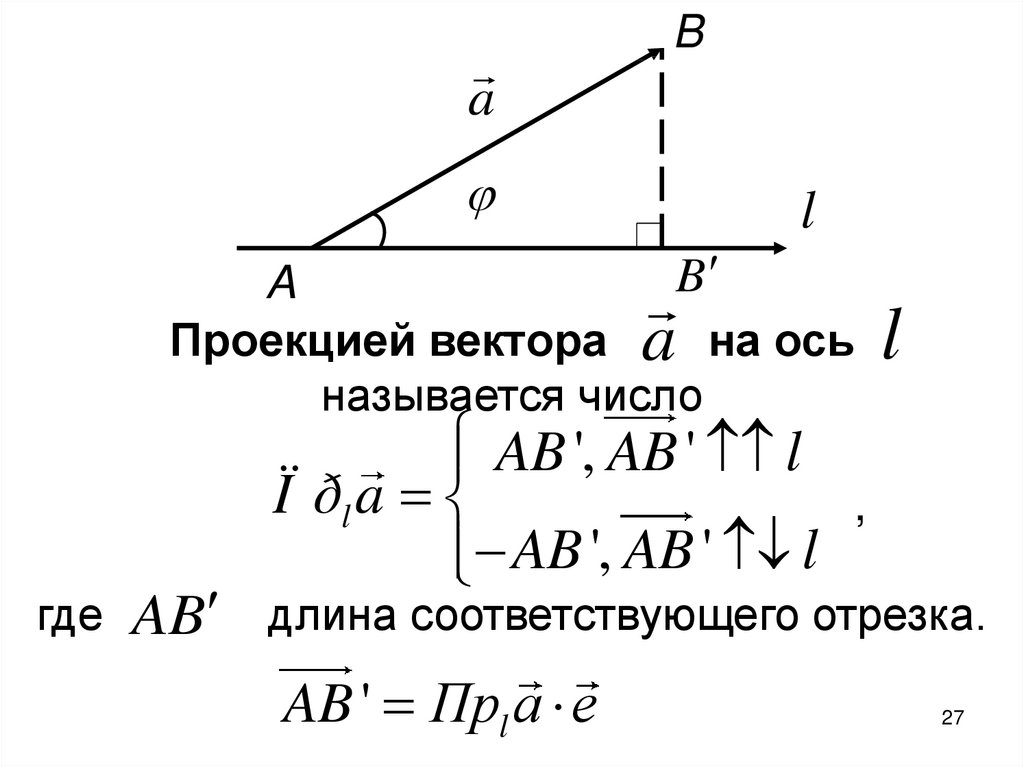
27.
aB
l
B
A
Проекцией вектора a на ось
называется число
где
AB
AB ', AB ' l
Ï ðl a
AB ', AB ' l
l
,
длина соответствующего отрезка.
AB ' Прl a e
27
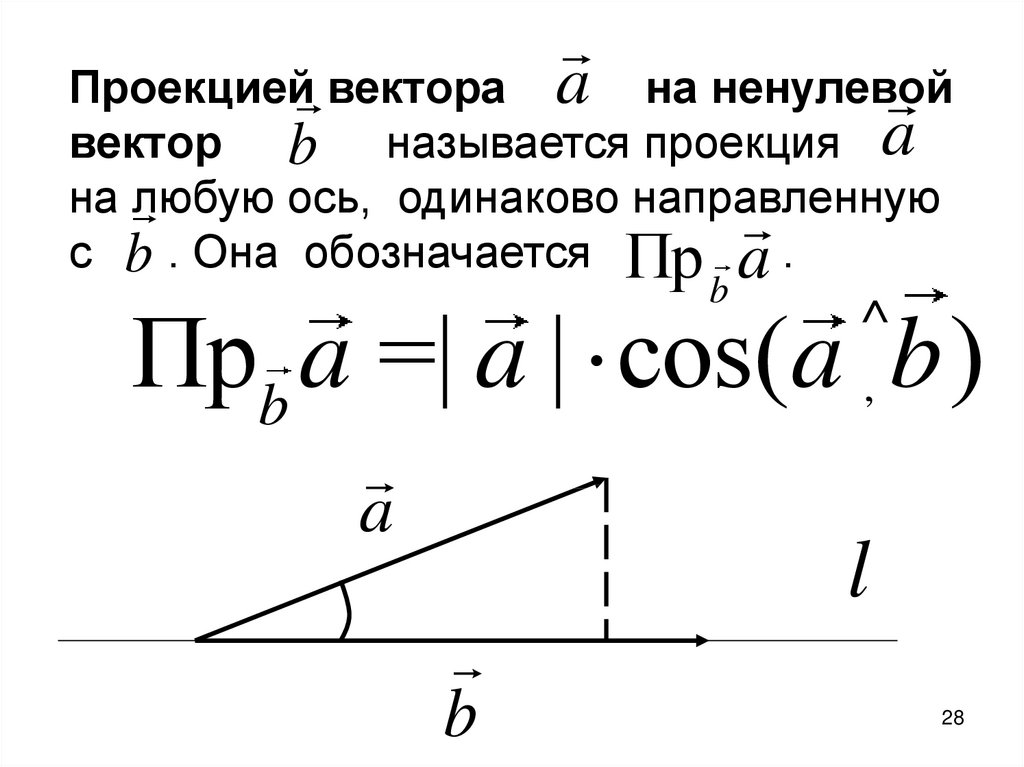
28.
aПроекцией вектора
на ненулевой
вектор b называется проекция a
на любую
ось, одинаково направленную
с b . Она обозначается Пр a .
b
Прb a =| a | cos(a , b )
a
^
l
b
28
29.
Свойства проекций:1. Проекция вектора на ось равна
произведению длины вектора на косинус
угла между вектором и осью , т.е.
Пр l a =| a | cos ,
2. При умножении вектора на число, его
проекция также умножится на это число,т.е.
Пр l ( a ) = Пр l a
3. Проекция суммы векторов равна сумме
проекций, т.е.
Пр l ( a b ) = Пр l a Пр l b
29
30.
§3. Линейная зависимость и линейнаянезависимость векторов
Линейной комбинацией
системы
векторов e1 , e2 ,....., en называется сумма
произведений
этих
элементов
на
произвольные числа 1 , 2 ,..., n
1e1 2 e2 ... n en .
Числа 1 , 2 ,..., n называются
коэффициентами линейной
комбинации.
30
31.
Линейно зависимой называетсятакая
система векторов e1 , e2 ,....., en , в
которой из равенства нулю их линейной
комбинации
1e1 2e2 ... nen 0
следует существование хотя бы одного
ненулевого коэффициента 1 , 2 ,..., n
данной комбинации.
Линейно независимой называется
система векторов, в которой указанное
равенство возможно только в
единственном случае, когда 1 = 2 = ... = n =31.0
32.
Теорема (Необходимое и достаточноеусловие линейной зависимости системы
векторов). Система векторов линейно
зависима, тогда и только тогда, когда хотя
бы один из них может быть представлен в
виде линейной комбинации остальных .
Доказательство:
1)Необходимость.
1e1 2e2 ... nen 0,
n
2
1 0, e1 e2 ... en .
1
1
32
33.
2) Достаточность.e1 2 e2 3e3 ... n en ,
( 1) e1 2e2 ... n en 0, 1 0.
Следствия :
1. Два вектора линейно зависимы тогда и
только тогда, когда они коллинеарны.
2. Три вектора линейно зависимы тогда и
только тогда, когда они компланарны.
3. Четыре и более вектора всегда линейно
зависимы.
33
34.
Базисом на плоскости называетсяупорядоченная
пара
неколлинеарных
векторов e ,e , отложенных от одной
1 2
точки.
Базисом в пространстве называется
упорядоченная тройка
некомпланарных векторов e1 , e2 , e3 ,
отложенных от одной точки.
34
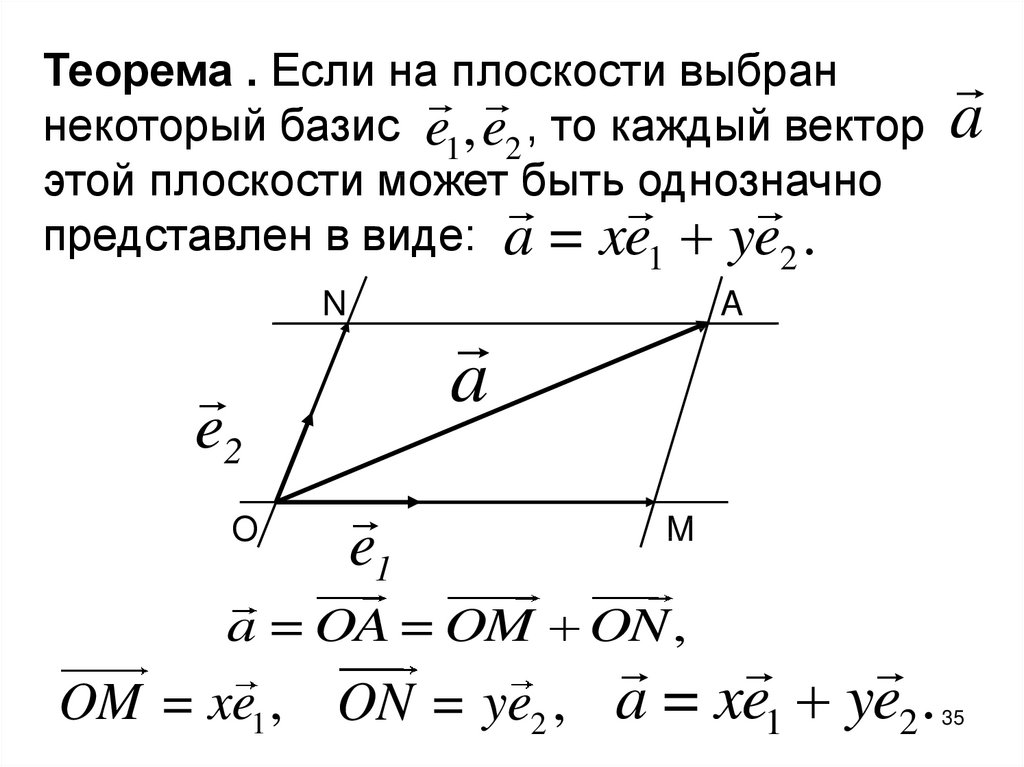
35.
Теорема . Если на плоскости выбраннекоторый базис e1 ,e2 , то каждый вектор
этой плоскости может быть однозначно
представлен в виде: a = xe1 ye2 .
N
O
A
a
e2
e1
a
M
a = OA = OM ON ,
OM = xe1 , ON = ye2 , a = xe1 ye2 .
35
36.
Пусть a = xe1 ye2a = x1e1 y1e2 ,
и
0 = ( x1 x)e1 ( y1 y )e2 .
При x1 x 0 получим противоречие
y1 y
e1 =
e2 .
x1 x
Это означает, что x = x1и y = y1.
36
37.
aРазложением
вектора
по
базису
векторов e1 ,e2 называется запись вектора в
виде
a = xe1 ye2
Координатами вектора a в данном базисе
называются коэффициенты x, y в этом
разложении.
a = ( x, y )
Ортонормированным называется базис,
все образующие векторы которого взаимно
перпендикулярны и имеют единичную
длину.
37
38.
§4. Декартова прямоугольная системакоординат
Z
M
z
x
X
k
j
O
i
y
Y
38
39.
Декартовыми прямоугольнымикоординатами вектора a относительно
данной системы координат OXYZ назовем
упорядоченную
тройку
чисел
x = Пр a, y = Пр a , z = Пр a.
i
a = xi yj zk ,
j
k
a = ( x, y, z ).
Декартовыми прямоугольными
координатами точки М относительно
данной системы координат OXYZ
называются координаты её радиус-вектора
OM ,так что
OM = xi yj zk , M ( x, y, z ).
39
40.
Линейные операции над векторами вкоординатной форме
Теорема (Координатный признак
равенства
векторов). Пусть a = ( x1; y1; z1,)
а b = ( x2 ; y2 ; z 2 ) . В фиксированной
системе координат векторы равны тогда и
только тогда, когда равны их координаты,
т.е.
1
2
x x ,
y1 y2 ,
z1 z2 .
40
41.
Теорема (О линейных операциях надвекторами в координатной форме).
1. Координаты суммы векторов равны
сумме соответствующих координат
слагаемых, т.е.
a b = ( x1 x2 ; y1 y2 ; z1 z2 ).
2. Координаты произведения вектора на
число k равны произведению
соответствующих координат на это число,
т.е.
ka = (kx1 ; ky1 ; kz1 ).
41
42.
Доказательство.1)
a b = ( x1i y1 j z1k )
( x2 i y2 j z2 k ) = ( x1 x2 )i
( y1 y 2 ) j ( z1 z2 )k .
Если
a b = ( x; y; z )
, то
x = x1 x2 ,
y = y1 y2 ,
z = z1 z2 .
42
43.
2)ka = k ( x1i y1 j z1k ) =
(kx1 )i (ky1 ) j (kz1 )k .
Если
ka ( x; y; z )
, то
x = kx1 ,
y = ky1 ,
z = kz1.
43
44.
Следствие 1 (Выражение координатвектора через координаты его конца и
начала). Пусть координаты точек A( xA , y A , z A )
и B( xB , yB , zB ), тогда
AB = ( xB x A ; yB y A ; z B z A ).
Следствие 2 (Координатный признак
коллинеарности
векторов).
Вектор
a = ( x1; y1; z1 ) коллинеарен
вектору b = ( x2 ; y2 ; z 2 ) тогда и только тогда,
когда выполнено равенство
x1
y1
z1
=
=
.
x2
y2
z2
44
45.
Пример . Пусть A(1; 3; 0) , B( 4; 2; 1).Найти координаты вектора AB .
AB = ( 4 1; 2 ( 3); 1 0) = ( 5; 5; 1).
Пример. При каком значении
коллинеарны
векторы
a = (1,0,
и b = (3,0,5) .
1
= = 5/3.
3 5
)
45
46.
§5. Скалярное произведениевекторов
Скалярным
ненулевых
произведением
векторов a и b называется число,
равное произведению длин этих векторов
на косинус угла между ними
^
a b | a | | b | cos(a b )
Если a = 0
или b = 0 то
a b 0
,
46
47.
Свойства скалярного произведенияСвойство 1. (Признак ортогональности).
Для того чтобы два ненулевых вектора
были ортогональны, необходимо и
достаточно, чтобы их скалярное
произведение равнялось нулю.
a b a b = 0.
47
48.
Доказательство. Необходимость.^
Если a b, то a b = /2 , и тогда
a b =| a | | b | cos( ) =| a | | b | 0 = 0.
2
Достаточность. Если a b = ,0
,
то | a | | b | cos(a , b ) = 0 . Но | a | 0
^
и | b | 0 , поэтому cos (a , b ) = 0 и
^
a , b = /2.
^
48
49.
Свойство 2. Угол между двумяненулевыми векторами острый (тупой),
если их скалярное произведение
положительно (отрицательно).
Свойство 3. Скалярное произведение
двух векторов равно произведению длины
одного вектора на проекцию второго на
направление первого, т.е.
a b a Прa b b Прb a
49
50.
Свойство 4. Скалярное произведениевектора самого на себя равно квадрату
длины вектора:
2
2
a a a
=| a | .
a b = b a.
Свойство 5. (переместительное)
Свойство 6. (распределительное)
a (b c ) = a b a c .
Свойство 7. (сочетательное относительно
скалярного множителя)
a ( b ) = ( a b ).
50
51.
Пример. Упростить выражение.(2a b ) (a b ) =
2
2
2a b a 2a b b =
2
2
2a a b b .
.
51
52.
§6. Вычисление длин векторов и угловмежду ними.
Теорема (Выражение скалярного
произведения через координаты
сомножителей).
Пусть даны
декартовы координаты
векторов a = ( x1 , y1 , z1 ) и b = ( x2 , y2 , z 2. )
Тогда
a b = x1 x2 y1 y2 z1 z2 .
52
53.
Доказательство.a = x1i y1 j z1k , b = x2 i y2 j z2 k
(i j = 0,
2
2
j k = 0, i k = 0,
i =| i | = 1,
2
2
j =| j | = 1,
2
2
k =| k | = 1)
a b ( x1i y1 j z1k ) ( x2 i y2 j z 2 k )
2
x1 x2 i x1 y2 i j x1 z 2 i k y1 x2 j i
2
y1 y2 j1 y1 z 2 j k z1 x2 k i z1 y2 k j
2
z1 z 2 k x1 x2 y1 y2 z1 z 2 .
53
54.
Следствие 1 (Вычисление длинывектора).
Если a = ( x ; y ; z ), то
2
2
2
2
| a |= a = x y z .
Следствие 2 (Вычисление косинуса угла
между векторами).
a b
cos( a , b ) =
=
| a | |b |
x1 x2 y1 y2 z1 z2
^
x y
2
1
2
1
z
2
1
x2 y2 z2
2
2
2
.
54
55.
Следствие 3 (Координатный признакортогональности).
a b x1 x2 y1 y2 z1 z2 = 0.
Следствие 4 (Вычисление проекции
одного вектора на другой).
a b x1 x2 y1 y2 z1 z2
Ï ðb a =
=
.
2
2
2
|b |
x2 y2 z2
55
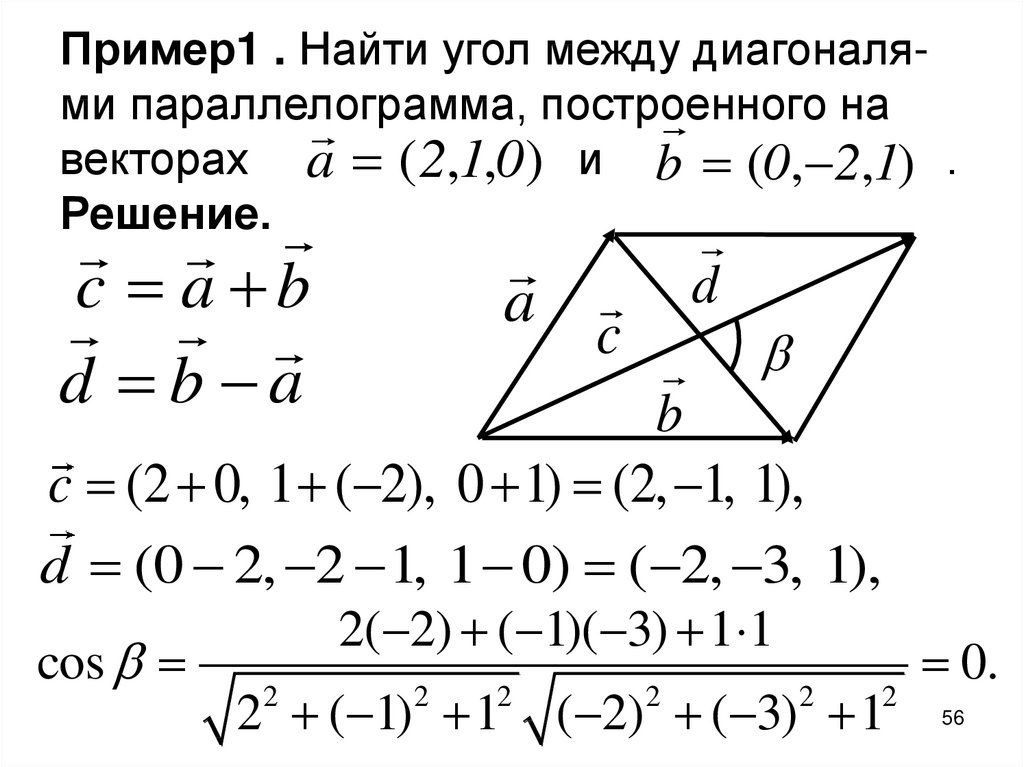
56.
Пример1 . Найти угол между диагоналями параллелограмма,построенного
на
векторах a (2,1,0 ) и b (0, 2,1) .
Решение.
c a b
d b a
a
c
d
b
c (2 0, 1 ( 2), 0 1) (2, 1, 1),
d (0 2, 2 1, 1 0) ( 2, 3, 1),
cos
2( 2) ( 1)( 3) 1 1
2 ( 1) 1
2
2
2
( 2) ( 3) 1
2
2
2
0.
56
57.
Пример 2. Даны координаты вершинтреугольника А(1,2,3), В(3,3,0), С(4,6,3).
Определить проекцию стороны АВ на
основание треугольника АС.
B
AB (2,1, 3), AC (3, 4, 0)
AB AC = AC Пр AC AB,
Пр AC AB
AB AC
A
C
AC
AB AC 2 3 1 4 ( 3) 0 10,
10
2
2
2
2.
| AC |= 3 4 0 = 5, Пр AC AB
5
57
58.
Пример 3. Найти вектор c ( x, y, z)длиной
ортогональный
векторам
6,
a = (3,4, 2) и b = (1,3,1),
образующий тупой угол с осью OZ.
3 x 4 y 2 z 0,
x 3 y z 0,
x 2 y 2 z 2 6.
58
59.
3x 4 y 2 z 0, 3x 4 z 2 z 0,3x 9 y 3z 0. 3x 6 z,
5 y 5 z 0,
x 2 z.
y z.
4 z z z 6 , 6 z 6,
2
z 1, z 1, z 1,
2
2
2
c = ( 2,1, 1).
2
59
60.
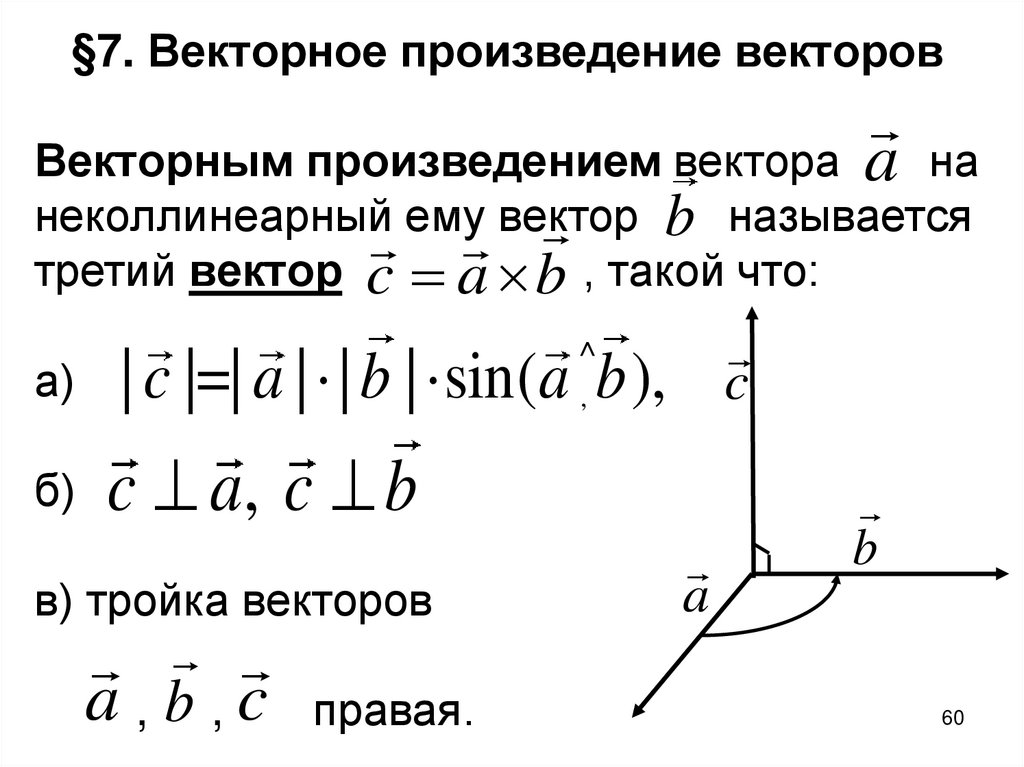
§7. Векторное произведение векторовa
Векторным произведением вектора
на
неколлинеарный ему вектор
называется
b
третий вектор c a b , такой что:
а)
б)
c
| c |=| a | | b | sin(a , b ),
^
c a, c b
в) тройка векторов
a,b ,c
правая.
a
b
60
61.
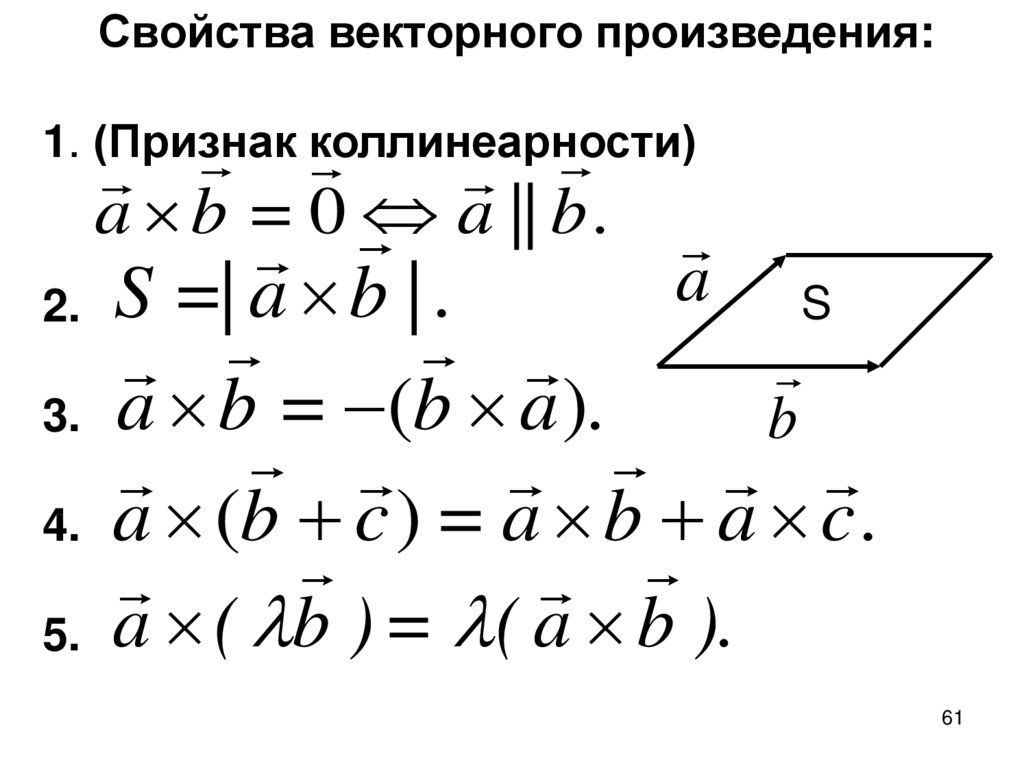
Свойства векторного произведения:1. (Признак
коллинеарности)
a b = 0 a || b .
2.
3.
4.
5.
a S
S =| a b | .
a b = (b a ).
b
a (b c ) = a b a c .
a ( b ) = ( a b ).
61
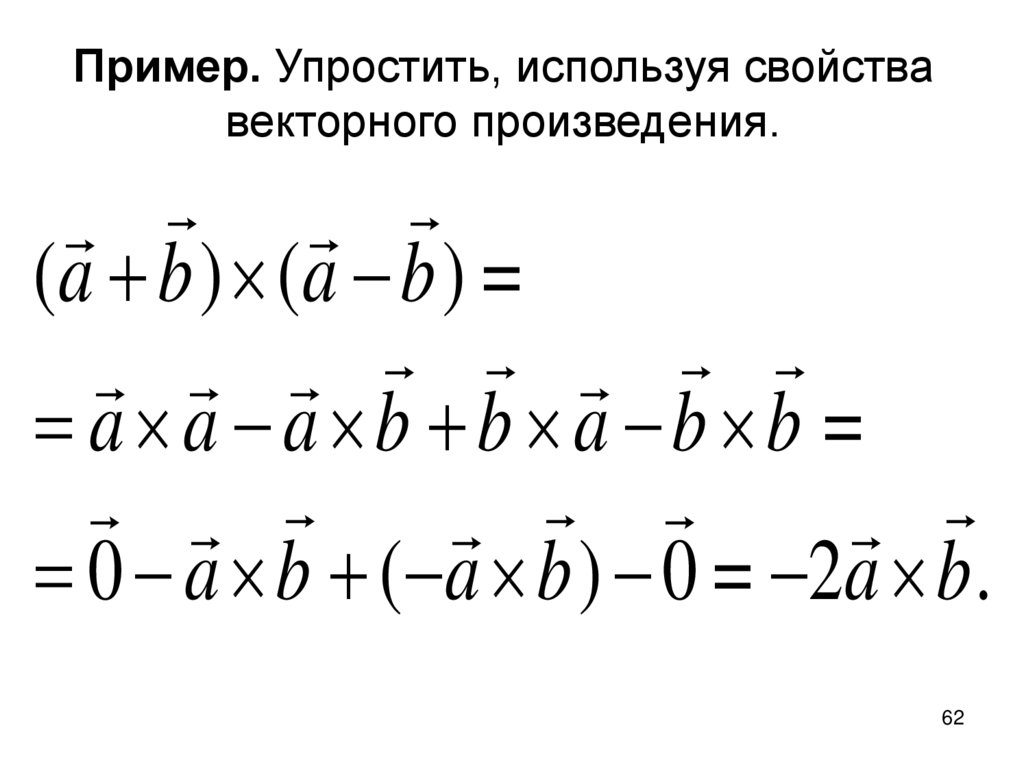
62.
Пример. Упростить, используя свойствавекторного произведения.
(a b ) (a b ) =
a a a b b a b b =
0 a b ( a b ) 0 = 2a b .
62
63.
Теорема (Вычисление векторногопроизведения в координатной форме).
Пусть
декартовы
координаты
векторов
a = ( x1; y1; z1 ) и b = ( x2 ; y2 ; z2 ) ,тогда
a b = ( y1 z2 z1 y2 ; z1 x2 x1 z2 , x1 y2 x2 y1 ).
Доказательство. Учтем, что
a = x1i y1 j z1k ,
b x2 i y2 j z2 k .
63
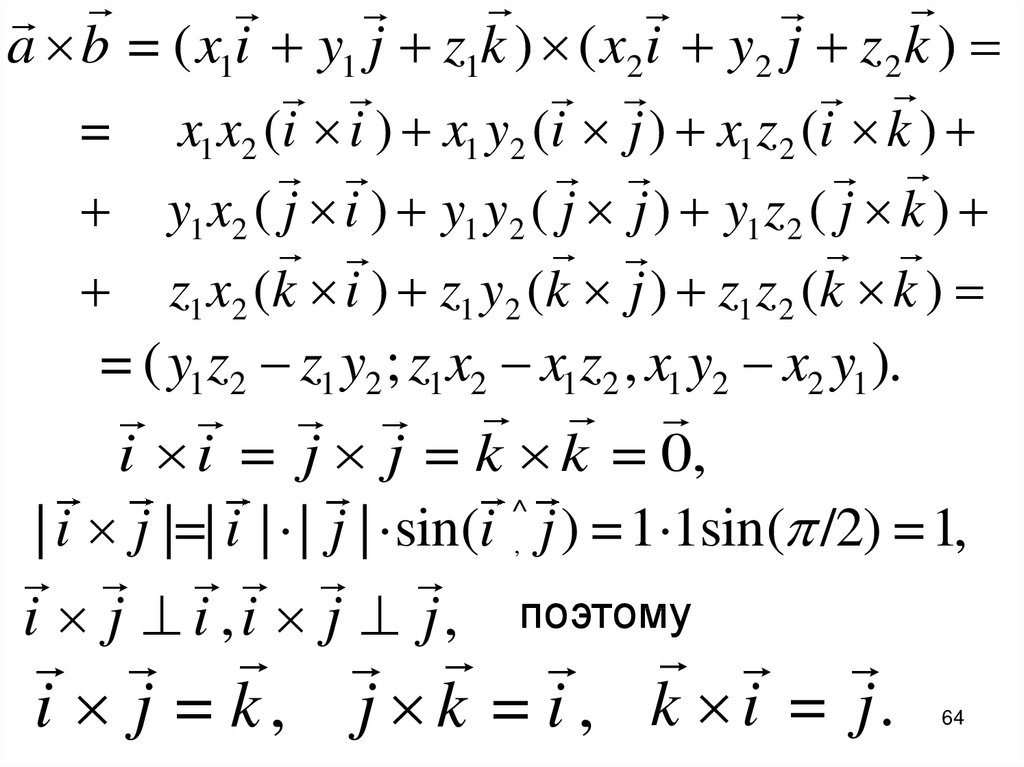
64.
a b = ( x1i y1 j z1k ) ( x2 i y2 j z2 k )= x1 x2 (i i ) x1 y2 (i j ) x1 z2 (i k )
y1 x2 ( j i ) y1 y2 ( j j ) y1 z2 ( j k )
z1 x2 (k i ) z1 y2 (k j ) z1 z 2 (k k )
= ( y1 z2 z1 y2 ; z1x2 x1z2 , x1 y2 x2 y1 ).
i i = j j = k k = 0,
^
| i j |=| i | | j | sin(i , j ) = 1 1sin( /2) = 1,
i j i , i j j , поэтому
i j = k , j k = i , k i = j.
64
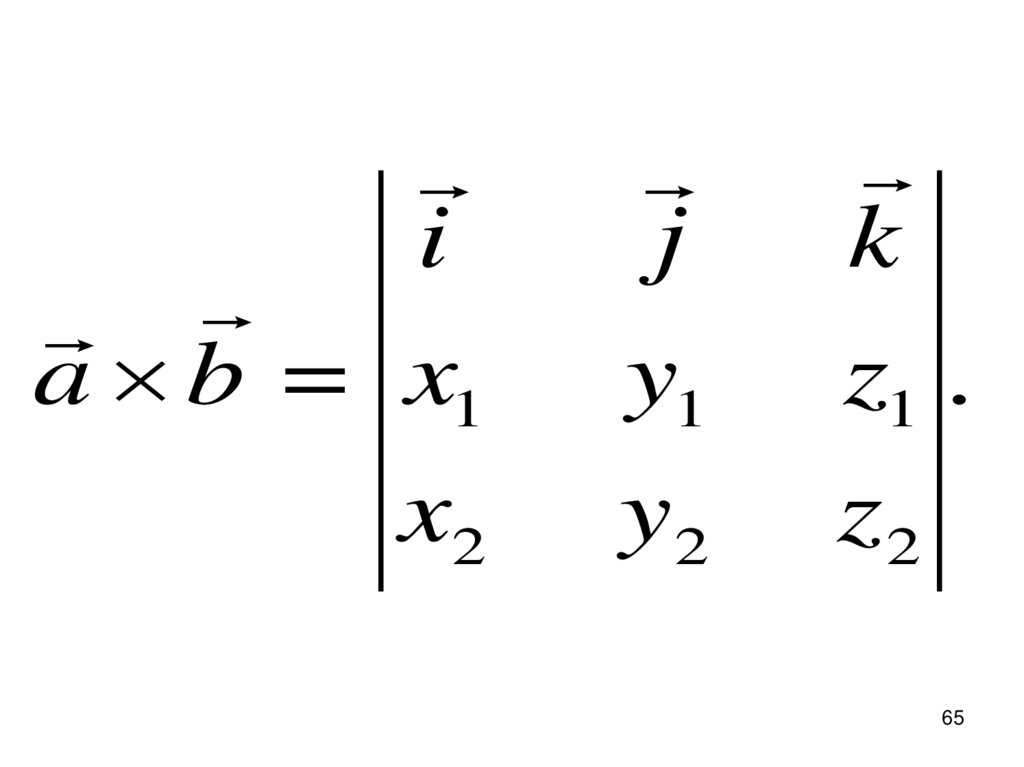
65.
a b = x1j
k
y1
z1 .
x2
y2
z2
i
65
66.
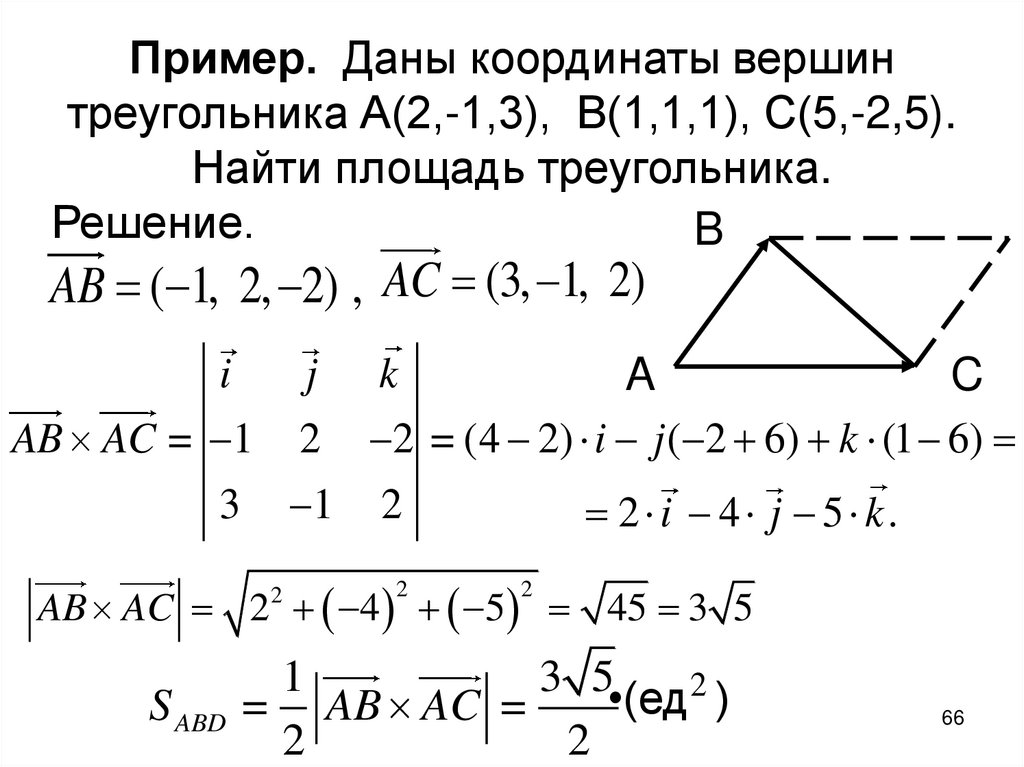
Пример. Даны координаты вершинтреугольника А(2,-1,3), В(1,1,1), С(5,-2,5).
Найти площадь треугольника.
Решение.
B
AB ( 1, 2, 2) , AC (3, 1, 2)
A
C
AB AC = 1 2 2 = (4 2) i j ( 2 6) k (1 6)
3 1 2
2 i 4 j 5 k.
i
j
k
AB AC 2 4 5 45 3 5
2
S ABD
2
2
1
3 5
2
•(ед
)
= AB AC =
2
2
66
67.
§8. Смешанное произведение векторовСмешанным произведением
упорядоченной тройки векторов a , b , c
называют число, равное скалярному
произведению вектора
a на векторное
произведение b c .
a (b c )
Если хотя бы один из векторов
равен нулю, то
a, b , c
a (b c ) 0
67
68.
Свойства смешанного произведения:1.
a (b c ) b (c a ) c (a b ).
(a , b , c ) = (b , c , a ) = (c , a , b ).
2. ( a , b , ( c )) = ( a , b , c ).
3. ( a , (b1 b2 ), c ) = ( a , b1 , c ) ( a , b2 , c ).
4. ( a , b , c ) = 0 c ( a b ).
68
69.
5. (Выражение смешанного произведения через координаты сомножителей).Если известны декартовы прямоугольные
координаты векторов a = ( x1 ; y1 ; z1 ) ,
b = ( x2 ; y2 ; z2 ) и c = ( x3 ; y3 ; z3 ) , то
x1
y1
z1
a (b c ) = x2
y2
z2 .
x3
y3
z3
69
70.
Доказательство.a (b c ) = c (a b ) = x3 ( y1z2 z1 y2 )
y3 ( z1 x2 x1 z2 ) z3 ( x1 y2 x2 y1 )
x1
y1
z1
= x2
x3
y2
y3
z2 .
z3
70
71.
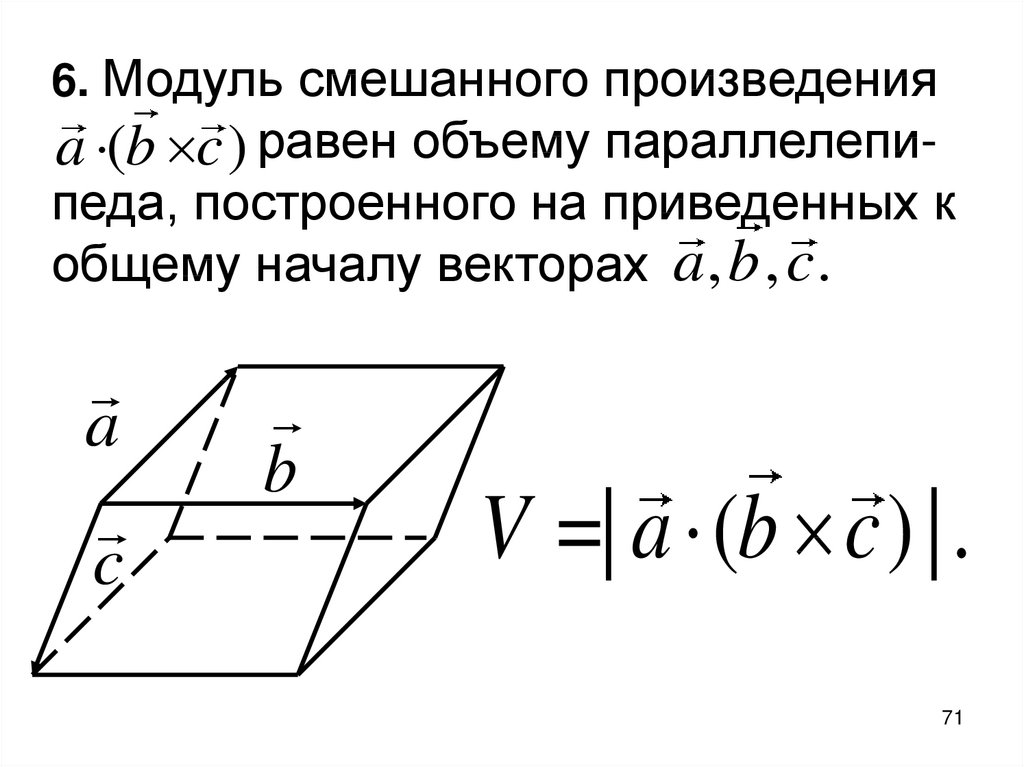
6. Модуль смешанного произведенияa (b c ) равен объему параллелепи-
педа, построенного на приведенных к
общему началу векторах a , b , c .
a
c
b
V =| a (b c ) | .
71
72.
Пример 1 . Доказать, что векторыa i j k , b i j ( 1)k
и c i j k
не могут быть
компланарными ни при каком значении
Решение. 1
1
( a ,b , c ) = 1
.
1
1 1
1
( 1) 2.
1
72
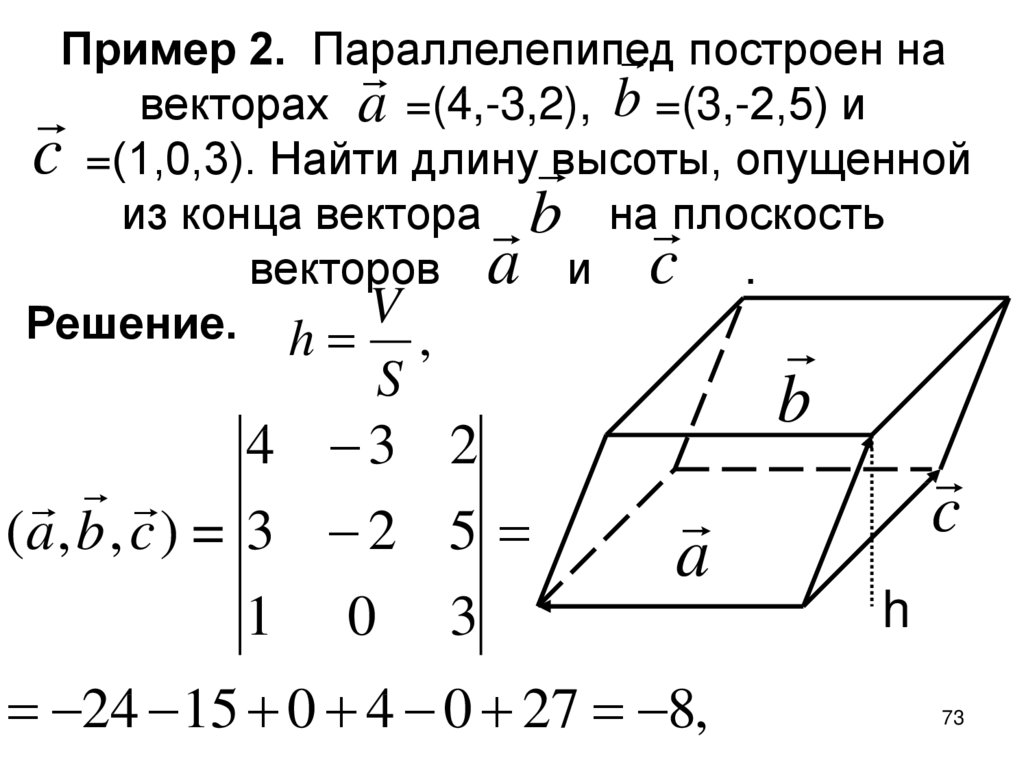
73.
Пример 2. Параллелепипедпостроен на
векторах a =(4,-3,2), b =(3,-2,5) и
c =(1,0,3). Найти длину высоты, опущенной
из конца вектора b на плоскость
векторов a и c .
Решение. h V ,
S
b
4 3 2
(a , b , c ) = 3 2 5
1 0 3
a
24 15 0 4 0 27 8,
c
h
73
74.
S =| a c |,V =| 8 | 8,
i
j
k
a c = 4 3 2 9i 10 j 3k ,
1 0 3
S ( 9) ( 10) 3 190 ,
2
8
h
190
2
2
•(ед.дл.)
74