 Физика
ФизикаПохожие презентации:










Нерелятивистская (ньютонова) механика. Кинематика
1.
cгде с=3∙108 м/c.
2.
Простейшие модели механических систем:•материальная точка (м.т.) – любой объект, формой и размерами которого
в данной задаче (в данных условиях) можно пренебречь;
•набор конечного числа материальных точек – достаточно общая модель
произвольной механической системы;
•абсолютно твёрдое тело (АТТ) – тело, форма и размеры которого при
наличии тех воздействий, что описаны в условиях задачи, могут считаться
неизменными.
Тело отсчёта, жёстко
связанная с ним система
координат и часы образуют
систему отсчёта.
3.
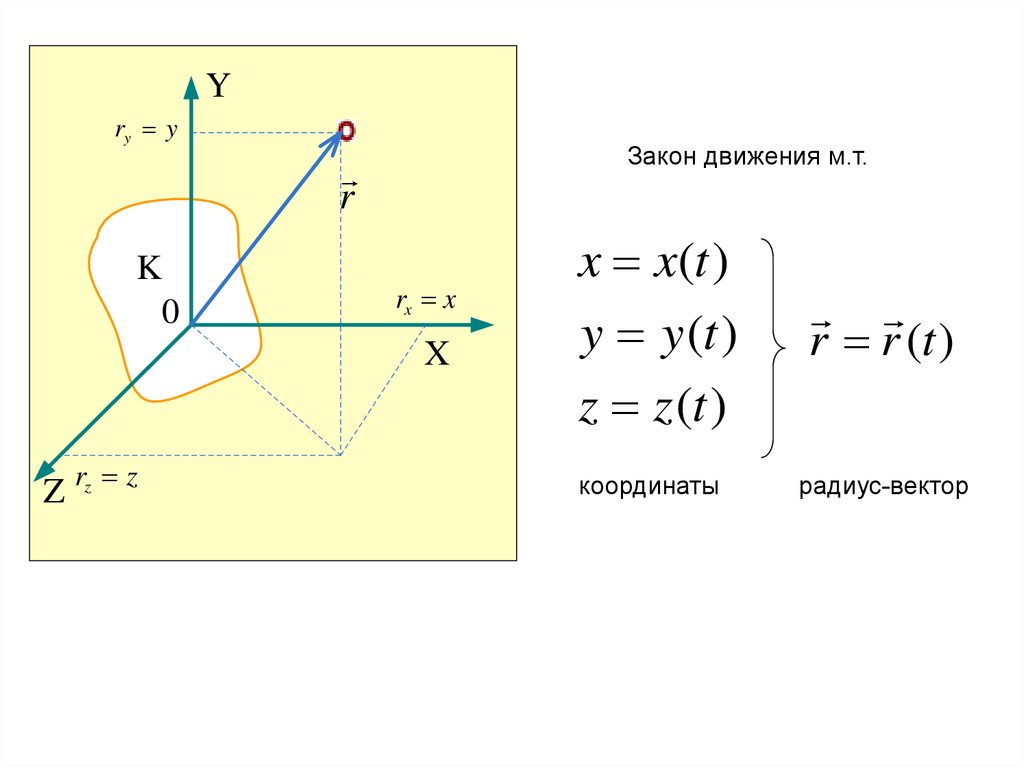
Yry y
Закон движения м.т.
r
K
0
rx x
X
Z rz z
x x(t )
y y (t )
z z (t )
координаты
r r (t )
радиус-вектор
4.
t1r (t1 )
Y
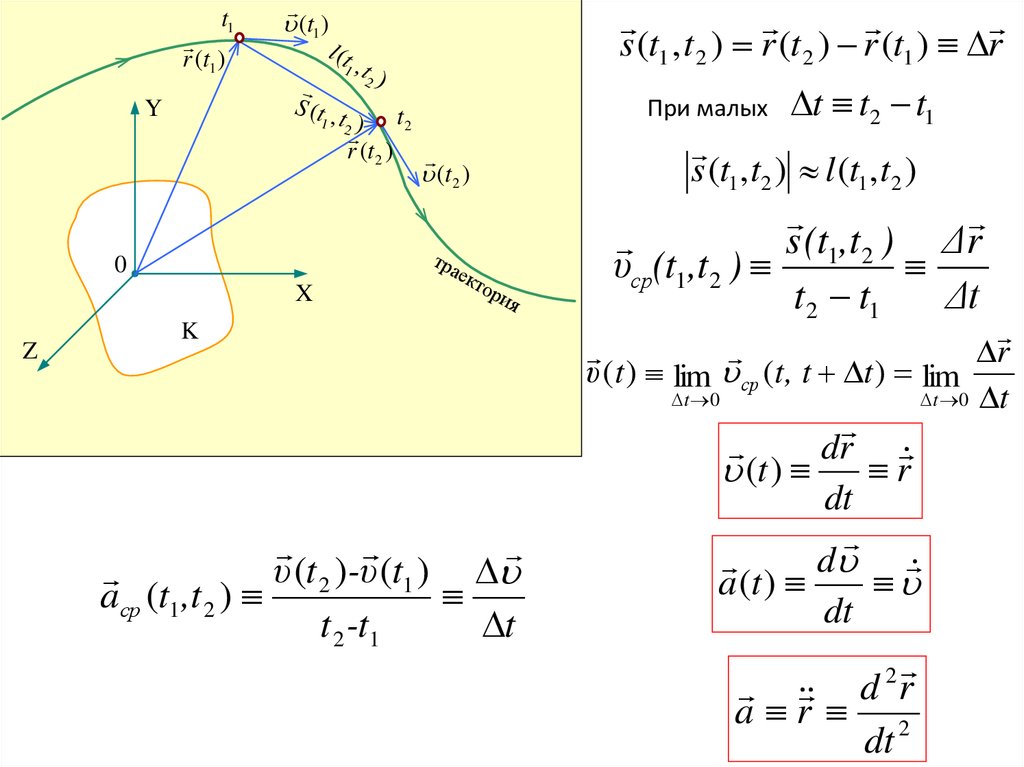
s (t1 , t 2 ) r (t 2 ) r (t1 ) r
(t1 )
l (t
1
,t
2)
S (t , t
t2
1 2)
r (t 2 )
При малых
s (t1, t2 ) l (t1, t2 )
(t2 )
0
X
Z
тр а
ект
ор
t t2 t1
ия
K
υ (t 2 )-υ (t1 )
aср (t1 ,t 2 )
t 2 -t1
t
s (t1,t2 ) Δr
υср(t1,t2 )
t2 t1
Δt
r
υ (t ) lim ср (t, t t ) lim
t 0
t 0 t
dr
(t )
r
dt
d
a (t )
dt
2
d r
a r 2
dt
5.
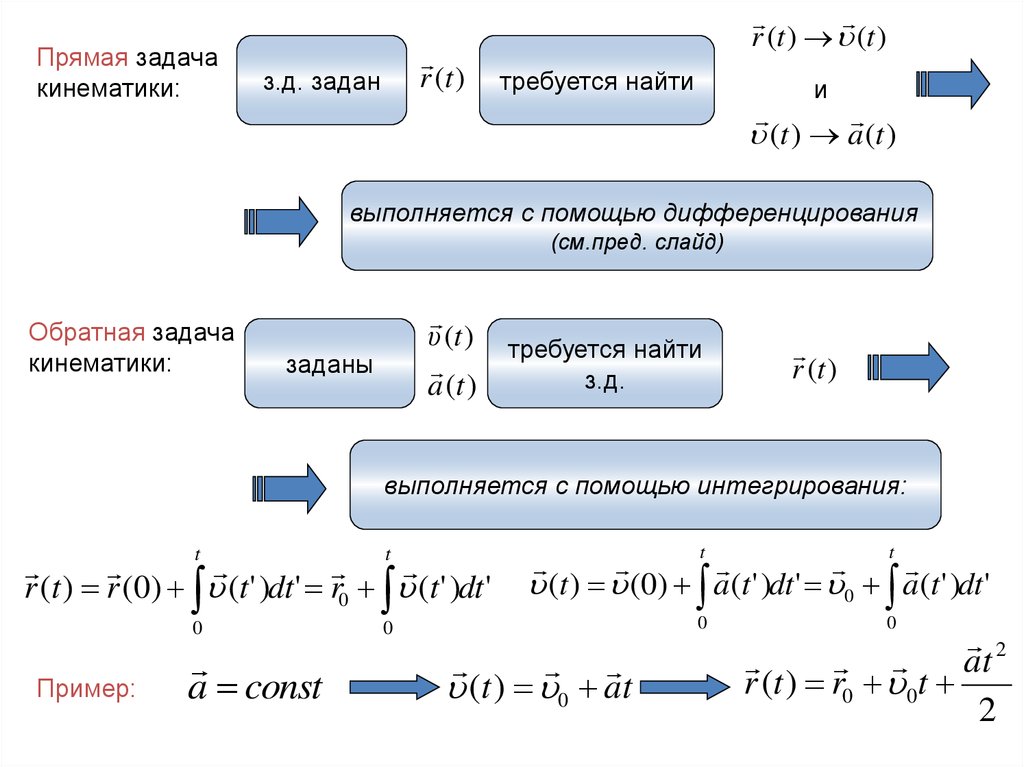
Прямая задачакинематики:
r (t )
з.д. задан
r (t ) (t )
требуется найти
и
(t ) a (t )
выполняется с помощью дифференцирования
(см.пред. слайд)
Обратная задача
кинематики:
υ (t )
a (t )
заданы
требуется найти
з.д.
r (t )
выполняется с помощью интегрирования:
t
t
0
0
r (t ) r (0) (t ' )dt ' r0 (t ' )dt '
Пример:
a const
t
(t ) (0) a(t ' )dt ' 0 a(t ' )dt '
t
0
(t ) 0 a t
0
2
at
r (t ) r0 0t
2
6.
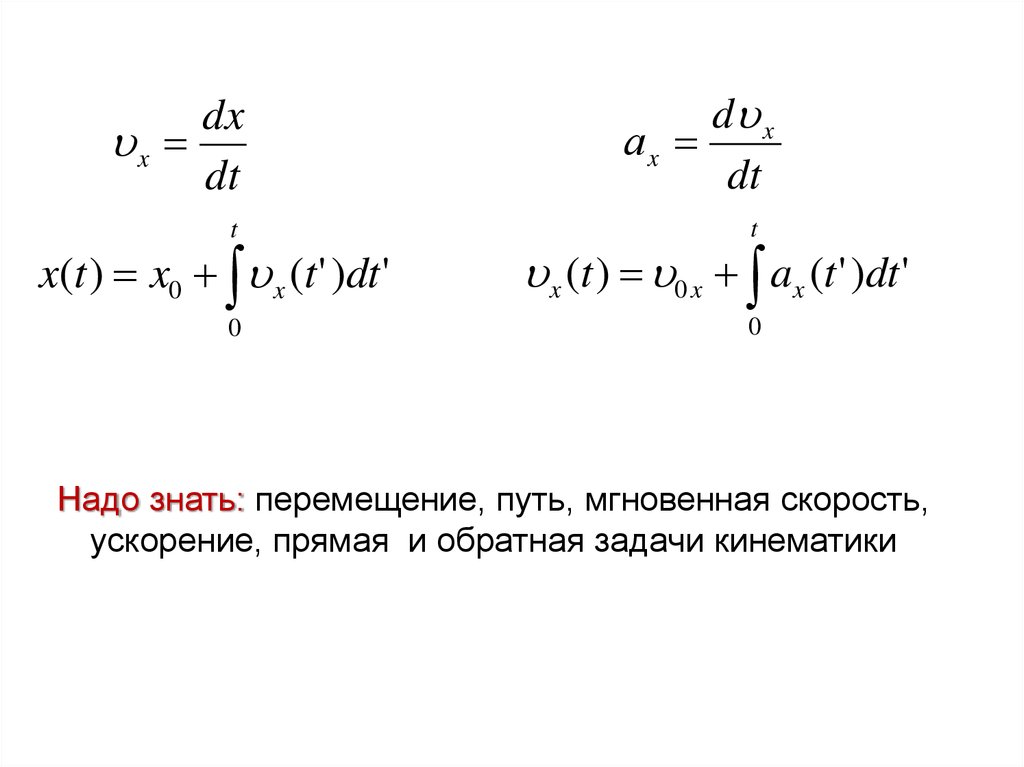
dxx
dt
t
x(t ) x0 x (t ' )dt '
0
d x
аx
dt
t
x (t ) 0 x ax (t ' )dt '
0
Надо знать: перемещение, путь, мгновенная скорость,
ускорение, прямая и обратная задачи кинематики
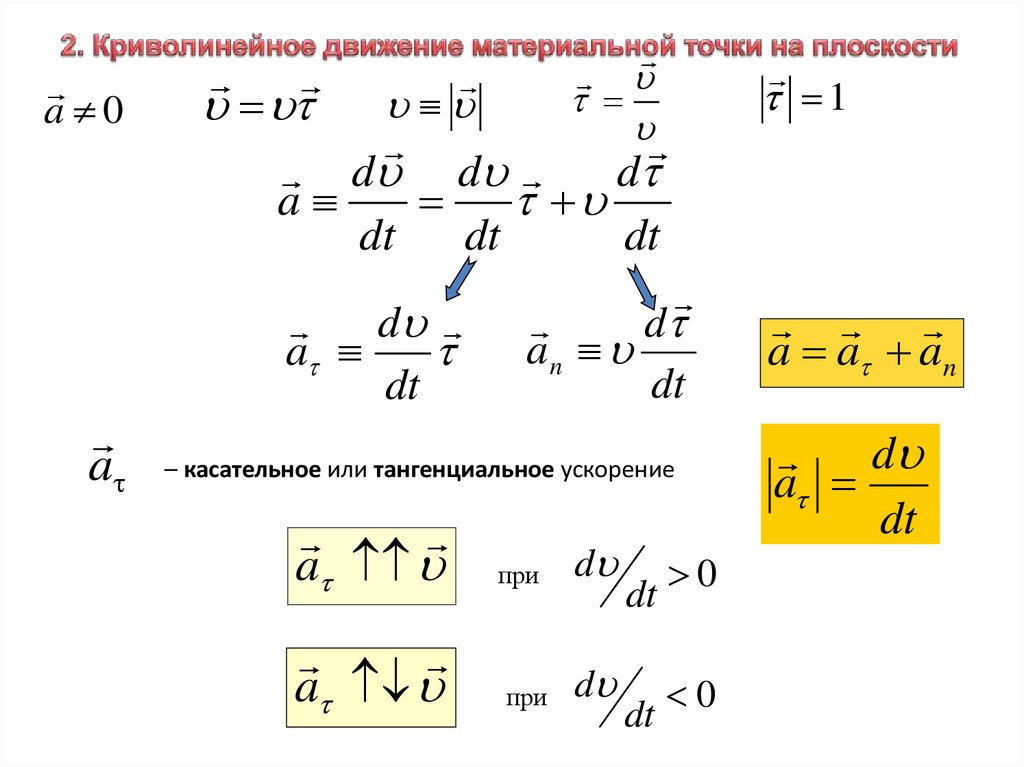
7.
a 01
d d
d
a
dt
dt
dt
d
a
dt
a
d
an
dt
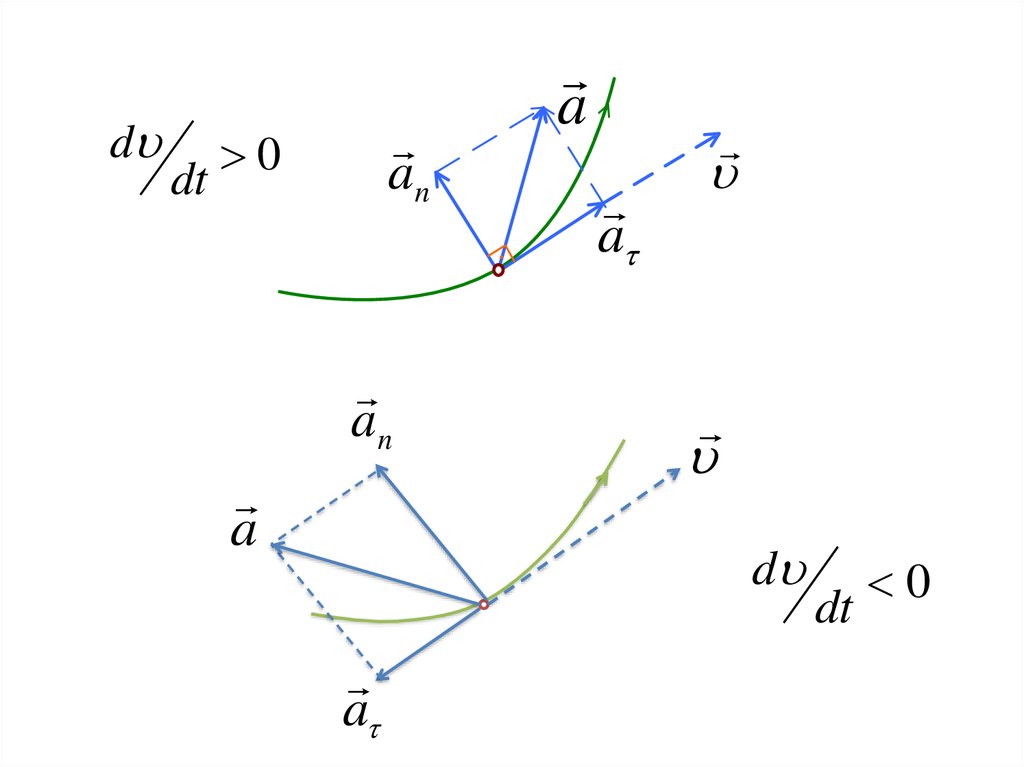
– касательное или тангенциальное ускорение
a
a
при
при
d
d
dt
dt
0
0
a a an
d
a
dt
8.
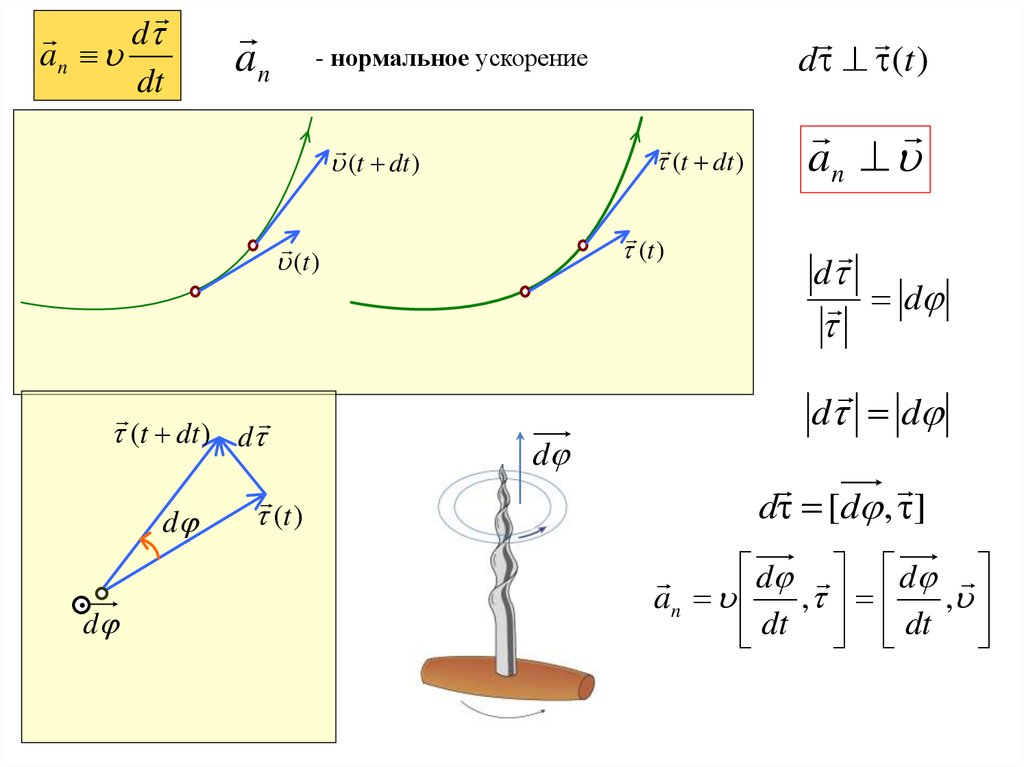
dan
dt
an
d (t )
- нормальное ускорение
(t dt )
(t dt )
(t )
(t )
an
d
d
(t dt ) d
d
.
d
(t )
d
d d
dτ [d , τ]
d d
an , ,
dt dt
9.
ddt
a
an
0
.
an
a
a
d
a
dt
0
10.
dan ,
dt
d
dt
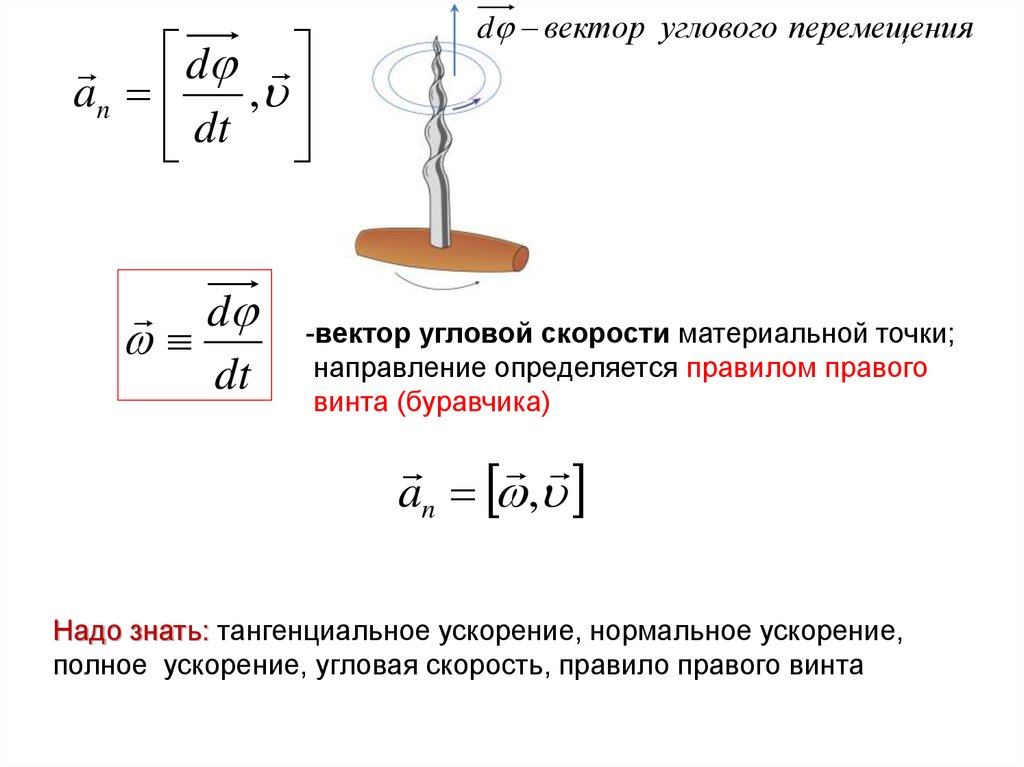
d вектор углового перемещения
-вектор угловой скорости материальной точки;
направление определяется правилом правого
винта (буравчика)
an ,
Надо знать: тангенциальное ускорение, нормальное ускорение,
полное ускорение, угловая скорость, правило правого винта
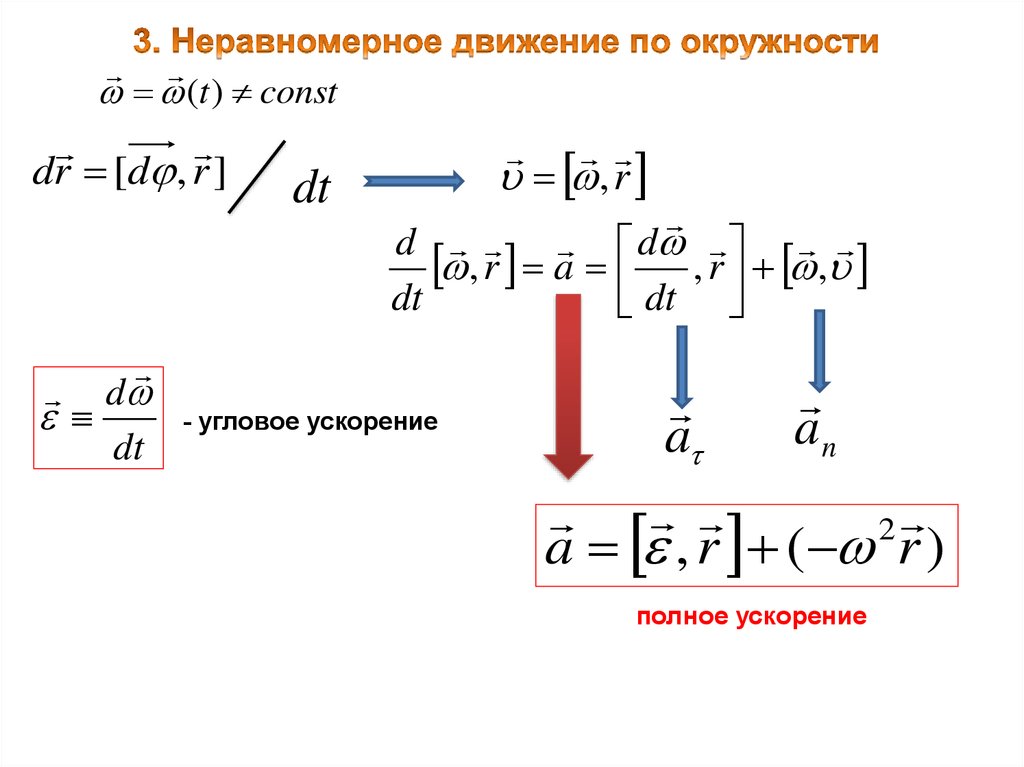
11.
(t ) constdr [d , r ]
, r
dt
d d
, r a , r ,
dt
dt
d
dt
- угловое ускорение
an
a
2
a , r ( r )
полное ускорение
12.
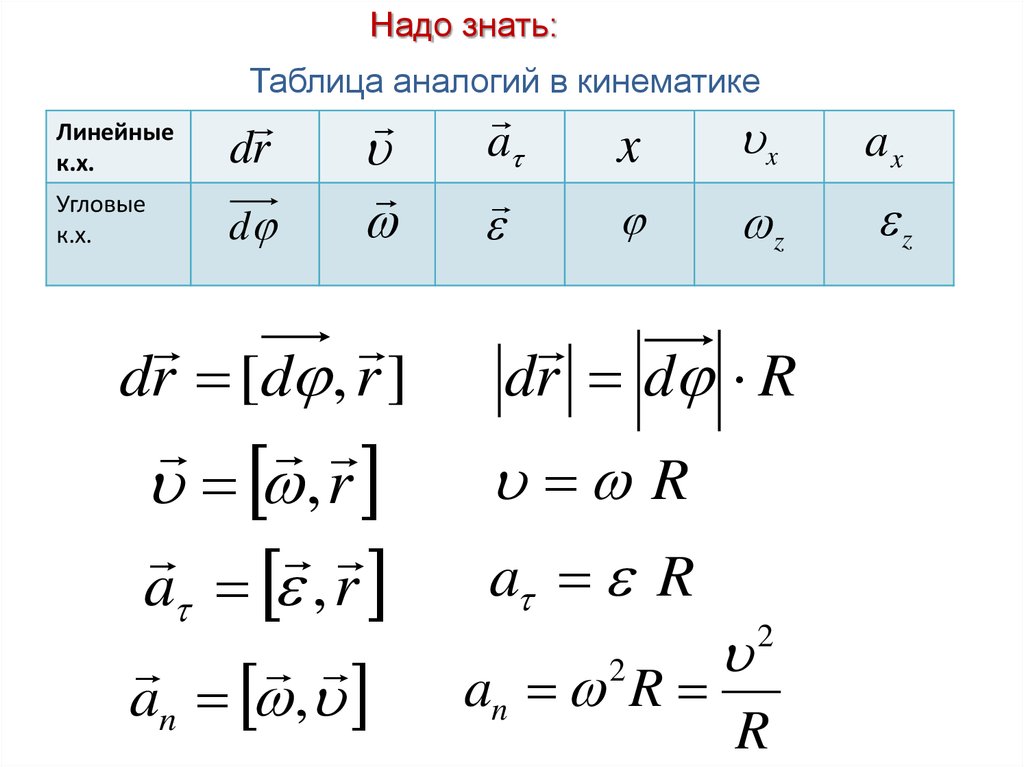
Надо знать:Таблица аналогий в кинематике
Линейные
к.х.
dr
Угловые
к.х.
d
a
x
x
ax
z
z
dr [d , r ]
, r
a , r
a R
an ,
an R
dr d R
R
2
2
R