







")
")




















")
")



























 Математика
МатематикаПохожие презентации:

")








Расчет установившихся режимов. Математические модели. Методы
1. Расчет установившихся режимов
Математические моделиМетоды
Санкт-Петербург
НОУ ЦПКЭ, СПбГПУ
доц., к.т.н. Шаргин Ю.М.
1
2. Линии
Ziji
j
Параметры П-схемы замещения
L до ~300 км:
Yi
Yj
z 0 r0 jx0
1
Yi Y j y 0 l
2
L >300 км:
y 0 g0 jb0
Zв
0
z 0
y 0
z 0 y 0
Z ij z 0 l
Z ij Z в sh( 0 l )
1
Yi Y j th 0
Zв
l
2
волновое сопротивление
коэффициент распространения электромагнитной волны
2
3. Трансформаторы
Ui IiUj
Zij
Ij
Uj
i
j
g
Pх. х кВт
2
U ВН
.ном[ кВ ]
I % S ном[ МВ А]
bm х. х 2
100 U ВН .ном[ кВ ]
Ij
i
Y
rT
10 3
Zij
Ii
Iii
U
kij = j
Ui
Y g jb
Ui
2
Pк.з кВт U ВН
.ном кВ
2
S ном
МВ А
Yi
Uj
j
Ijj
Yj
Y
10 3 Ом
xТ zТ2 rТ2 [Ом ]
2
u k % U отв
zТ
[Ом ]
100 S ном
U отв %
U отв U ВН .ном 1 nотв
100
kij
U отв
U НН .ном
3
4. Параметры пассивной П-схемы замещения
Параметры П-схемы определяются через параметры Г-схемы.I i
U
U i j
k
ij
Z ij
k
,
I j
U i k ij U j
I i. Г I i. П
I j. Г I j. П
Z ij
2
ij
Действительный
тогда:
kij ,
Z ij
Г-схема и П-схема
эквивалентны,
если
Z ij
k ij
I i
I j
U i U j
Z 'ij
U i U j
Z 'ij
U iYi ,
U j Y j
kij
1
Yi
(kij 1)
(kij 1)
Z ij
Z ij
1
1
1
Yj
( 1 kij )
Z ij Z ij Zij
П-схема позволяет заменить две или более параллельно
включенные трансформаторные ветви с различными коэффициентами трансформации одной эквивалентной ветвью.
4
5. Активная П-схема замещения трансформаторной ветви
YijUi Ii
i
Ij
Iii
Uj
j
Ijj
Y
Yi
Yij
Ji
Yj
Jj
Трехобмоточные трансформаторы и автотрансформаторы имеют
трехлучевую схему замещения. Ветви среднего и низкого напряжений
представляют Г-схемой с идеальными трансформаторами или
активной П-схемой замещения.
То же, трансформаторы с расщепленной обмоткой НН.
Z ij
Yi Yij ( kij 1 )
Yj
Если коэффициент трансформации комплексный (при поперечном регулировании напряжения автотрансформаторов),
вращение векторов напряжений осуществляется за счет
воздействия задающих токов:
kij
( 1 kij )
Z ij
kij
J i U jYij 1
k
ij
k ij
J j U iYij 1
k
ij
5
6. Расчет электрического режима ветвей, моделируемых П-схемой замещения
Uii
Iij
Ii
Yij
Iii
Yi
Ji
Yj
Ij
Uj
Ijj
j
Jj
I ij (U i U j )Yij
I ii J i YiU i
I jj J j Y jU j
I i I ii I ij
I j I jj I ij
S i 3U i I i
S j 3U j I j
S ij S i S j
6
7. Нагрузка
СХН: Pнг p U , f Qнг q U , f• естественные
• с учетом регулирования напряжения
• для длительных режимов
f = f ном
U =U кр
2
U
U
Pнг Pнг.ном a0 a1
a2
U нг.ном
U нг.ном
2
U
U
Qнг Qнг.ном b0 b1
b2
U нг.ном
U
нг.ном
a0 a1 a2 1,0
b0 b1 b2 1,0
7
8. Типовые СХН
Вид характеристикиa0
Типовая на ступени
0,83
35 кВ и ниже
Типовая на ступени
0,83
110-220 кВ
Постоянная мощность
1
Постоянный
0
задающий ток
Постоянная
0
проводимость
a1
a2
b0
b1
b2
-0,3
0,47
4,9
-10,1
6,2
-0,3
0,47
3,7
-7,0
4,3
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
8
9. Pнг=Pнг(U)
1,8001,600
1,400
1,200
1,000
p(v)
~p(v)
0,800
0,600
0,400
0,200
0,000
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
U
~ p U exp 2a2 a1 ln
U нг.ном
9
10. Qнг=Qнг(U)
4,0003,500
3,000
2,500
q(v)
2,000
~q(v)
1,500
1,000
0,500
0,000
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
U
~ q U exp 2b2 b1 ln
U
нг
.
ном
1,60
10
11. СХН с учетом регулирования напряжения
Qнг2
Qнг.ном b0 b1 U U b2 U U ,
U
U нг.ном
ном
.
нг
если U U нг.ном U ,
Qнг.ном , если U нг.ном U U U нг.ном U ,
2
U U
U U
,
b2
Qнг.ном b0 b1
U
U
нг.ном
нг.ном
если U U нг.ном U ,
U , U отклонения напряжения от номинального значения в
сторону уменьшения и увеличения, компенсируемые АРНТ
и/или действиями оперативного персонала
11
12. СХН с учетом регулирующего эффекта нагрузки
а)2
U
U
f
a3
Pнг Pнг.ном a0 a1
a2
U нг.ном
U
f ном
нг.ном
б)
f
Pнг Pнг.ном 1 K нг
f
ном
где
в)
Pнг Pнг U
K нг
f
U f
Кнг - полный регулирующий эффект нагрузки
f
Pнг Pнг U 1 k нг
f ном
Pнг Pнг Pнг.ном Pнг.ном
k нг
f f ном f ном
f
где kнг - регулирующий эффект нагрузки при U=const
Зависимостью реактивной мощности нагрузки от частоты либо пренебрегают,
считая мощность постоянной, либо пересчитывают по формуле
Qнг Pнгtg нг
нг нг.ном const
(старые руководящие указания по устойчивости энергосистем).
12
13. Математические модели нагрузки
а – шунт;б – идеальный источник тока;
в – реальный источник тока;
г – реальный источник ЭДС
13
14. Математические модели нагрузки
Шунт:Z нг
U
3UU 3U 2
I
S нг
S нг
нг
I нг S нг
3U 2
3U 2Yнг
Yнг
2 S нг
Z нг
U 3U
S нг
Идеальный источник тока: J нг
3U
Реальный источник тока:
J нг I нг YнгU
Реальный источник ЭДС:
E нг U ZI нг
Преобразование реального
источника ЭДС в реальный
источник тока и наоборот:
E
J YE
Z
S
J нг нг YнгU
3U
1
Y
Z
14
15. Генераторы
В зависимости от поведения генераторов в процессе балансирования режимаони могут быть регулируемыми и изменять свою активную и/или реактивную
мощность, участвуя в сведении/замыкании баланса мощности в схеме, или
нерегулируемыми с фиксированными значениями активной и реактивной
мощности. Различают следующие типы генераторов:
PQ-генератор. Нерегулируемый генератор с заданными значениями генерации
активной и реактивной мощности, не зависящими от напряжения в узле (от
режима сети). Свободными параметрами режима генераторного узла, которые
определяются расчетом, являются модуль и угол напряжения в узле, т.е. вектор
напряжения.
PU-генератор. Регулируемый генератор с заданными уставками активной
мощности и модуля напряжения в узле. Активная мощность генератора
постоянна и не зависит от режима сети. Для поддержания заданного модуля
напряжения изменяется реактивная мощность генератора в пределах
регулировочного диапазона от Qmin до Qmax. Свободными параметрами
режима являются реактивная мощность генератора и угол напряжения узла.
При выходе на ограничения по реактивной мощности фиксируется ее
граничное значение (изменяется тип генератора на PQmin или PQmax),
свободными параметрами режима становятся модуль и угол напряжения. PUгенераторы участвуют в сведении баланса реактивной мощности в схеме. 15
16. Типы генераторных узлов
PEq-генератор. Регулируемый генератор с заданными уставками активноймощности и модуля напряжения в узле. Для этого типа генератора дополнительно
должны быть заданы синхронные индуктивные сопротивления по осям d и q. При
изменении режима сети изменяются возбуждение генератора (модуль синхронной ЭДС
Eq) в пределах регулировочного диапазона от Eqmin до Eqmax и угол между векторами
ЭДС и напряжения узла таким образом, чтобы получить заданные значения активной
мощности и модуля напряжения. Свободными параметрами режима генераторного узла,
которые определяются расчетом, являются реактивная мощность генератора и угол
напряжения узла.
При выходе на ограничения Eqmin или Eqmax модуль Eq фиксируется, при этом
свободным параметром режима становится модуль напряжения в узле, а реактивная
мощность генератора и угол напряжения по-прежнему остаются свободными
параметрами режима. Если ток якоря генератора превышает номинальный ток, то, если
не достигнуты ограничения по возбуждению, изменяется Eq таким образом, чтобы
уменьшить ток якоря до номинального, в противном случае уменьшается активная
мощность генератора. PEq-генераторы участвуют в регулировании баланса реактивной
мощности в схеме.
В отличие от PU-генератора, при регулировании PEq-генератора учитывается
взаимосвязь процессов регулирования активной и реактивной мощности, изменение
модуля вектора синхронной ЭДС влияет на угол и наоборот.
16
17. Типы генераторных узлов
1718. Типы генераторных узлов
jxIВекторная диаграмма PEq-генератора
+1
E
xd xq
xd
Eq
E
U cos( E U )
xq
xq
rI
U
а)
U 0
Ia
Eq min Eq Eq max
I
+j
I
Ip
18
19. Математические модели генераторов
а) шунт:Z нг
U
3UU 3U 2
I
S нг
S нг
нг
I нг S нг
Yнг
2
U 3U
б) идеальный источник тока:
S
J Г Г
3U
в) реальный источник тока:
J Г I Г YГU
г) реальный источник ЭДС:
E Г U ZI Г
S Г
J Г YГU
3U
19
20. Практические методы расчета режимов энергосистем
При расчете электрических режимов используются первый и второйзаконы Кирхгофа
n
i
k 1
m
k
0
n
I
k
k 1
m
m
0
m
u e U E
k 1
k
k 1
k
k 1
n - число ветвей, присоединенных к узлу
k
k 1
k
m - число ветвей, входящих в контур
Пусть электрическая схема имеет r узлов и s ветвей.
Если заданы ЭДС всех источников и параметры всех ветвей, то неизвестными
являются s токов ветвей. После нахождения токов, можно вычислить напряжения
в узлах
По первому закону Кирхгофа можно составить r уравнений, но только r-1 из них
независимы друг от друга.
По второму закону Кирхгофа можно составить s-r+1 независимых уравнений.
Законы Кирхгофа позволяют составить систему из (r-1)+(s-r+1)=s независимых
уравнений, решив которую можно найти токи в s ветвях.
Для уменьшения числа уравнений можно упростить схему, используя эквивалентные
20
преобразования, или использовать специальные методы контурных токов,
узловых напряжений.
21. Метод узловых напряжений
По этому методу составляется система уравнений для определения напряженийузлов относительно одного из узлов схемы, выбранного в качестве опорного
узла. Напряжение опорного узла выбирается произвольно и может быть равно
нулю. Тогда узловые напряжения являются фазными напряжениями.
Определив искомые узловые напряжения, которые являются фазными
напряжениями, можно найти напряжения на ветвях, токи ветвей, генерацию,
потребление, перетоки мощности, потери в сети и другие величины,
необходимые для анализа режима.
Минимальная исходная информация для проведения расчетов:
схема замещения электрической сети и параметры ее элементов,
текущие значения коэффициентов трансформации,
отключенные с одной или двух сторон ветви схемы,
полная мощность нагрузки в нагрузочных узлах,
полная мощность нерегулируемых генераторов,
уставки активной мощности и напряжения регулируемых генераторов,
располагаемый диапазон изменения реактивной мощности PU-генераторов,
зависящий от числа включенных в узле генераторов и их загрузки по активной
мощности, или пределы изменения модуля синхронной ЭДС PEq-генераторов.
21
22. Схема замещения электрической сети
Схема имеет пятьузлов.
Y40
4
Узел нулевого
потенциала (“земля”)
имеет номер 0.
Jнг4
JГ4
Y24
Jнг2
2
Y20
JГ2
Y34
Jнг3
3
Y23
Y12
Y13
Y30
JГ3
1
Jнг1
Y10
JГ1
Трансформаторы представлены П-схемой, тогда
Y12 Y21 , Y13 Y31 , Y23 Y32 , Y24 Y42 , Y34 Y43
22
23. Формирование системы узловых уравнений
Y12 (U 2 U 1 ) Y13 (U 3 U 1 ) Y10U 1 J Г1 J нг1 0,Y21(U 1 U 2 ) Y23 (U 3 U 2 ) Y24 (U 4 U 2 ) Y20U 2 J Г 2 J нг2 0,
Y31(U 1 U 3 ) Y32 (U 2 U 3 ) Y34 (U 4 U 3 ) Y30U 3 J Г 3 J нг3 0,
Y42 (U 2 U 4 ) Y43 (U 3 U 4 ) Y40U 4 J Г 4 J нг4 0.
Y11U 1 Y12U 2 Y13U 3
J 1 ,
Y21U 1 Y22U 2 Y23U 3 Y24U 4 J 2 ,
Y31U 1 Y32U 2 Y33U 3 Y34U 4 J 3 ,
Y42U 2 Y43U 3 Y44U 4 J 4
где Y11 Y12 Y13 Y10 ,
Y22 Y21 Y23 Y24 Y20 ,
Y33 Y31 Y32 Y34 Y30 ,
Y44 Y42 Y43 Y40
J i J Гi J нг i
23
24. Постановка задачи расчета установившегося режима
Система узловых уравнений является нелинейной системой уравнений, посколькурезультирующие задающие токи зависят от напряжений, которые нужно найти
(слайды 14 и 18). Если в узлах схемы включены нелинейные шунты, их параметры
тоже зависят от режима сети.
Нелинейная система может быть решена только методом последовательных
приближений.
На первый взгляд кажется, что для получения решения достаточно в качестве начальных значений
напряжений узлов задать номинальные напряжения и ориентировать вектора напряжений по оси
вещественных комплексной плоскости, задать активную и реактивную мощности нагрузки, активную и
реактивную мощности генераторов задать равной мощности нагрузки с учетом примерной оценки
потерь мощности в сети, и применить какой-либо метод решения системы нелинейных уравнений.
Итерации прекращаются по достижении заданной точности сведения балансов токов.
При такой постановке задачи итерационный процесс или расходится, или дает решение, как правило,
не соответствующее условиям задачи, т.к. система нелинейных уравнений может иметь несколько
решений.
Для получения решения, имеющего смысл, необходимо учесть физические свойства
объекта, для которого составлена система уравнений.
24
25. Постановка задачи расчета установившегося режима
1. Чтобы получить напряжения узлов, соответствующие условиям задачи, необходимо в ходеитеративного решения системы уравнений регулировать напряжение в узлах схемы.
Уже давно установлено, что представление генерации в схеме только PQ-генераторами
препятствует получению заведомо существующего решения и является причиной
неоднозначного решения нелинейной системы узловых уравнений или нарушения условий
существования решения. Изменение модуля вектора задающего тока PQ-генератора в
пределах диапазона допустимых значений при изменении напряжения узла не
контролируется и не ограничивается, а по углу этот вектор жестко привязан к вектору
напряжения. Поведение PQ-генератора в итеративном процессе не соответствует поведению
реального генератора при изменении режима сети.
Для регулирования напряжения в одном или нескольких узлах схемы PQ-генераторы
необходимо заменить регулируемыми PU- или PEq-генераторами, которые, поддерживая
заданное значение модуля напряжение, позволяют векторам задающего тока и напряжения
узла поворачиваться на различные углы в пределах, определяемых заданным
регулировочным диапазоном реактивной мощности генератора (возбуждения генератора).
Регулируемые генераторы обеспечивают уровень напряжений, соответствующий условиям
задачи, и участвуют в сведении баланса реактивных составляющих токов (мощностей) в
рассматриваемой схеме.
Генераторные узлы с регулируемыми генераторами называют опорными узлами.
2.
J i
U i
i=1,2,3,4
J i e j U i e j
Чтобы исключить неконтролируемое вращение векторов в ходе итераций,
препятствующее сведению баланса токов, и обеспечить однозначное
расположение векторов задающих токов и напряжений на комплексной
плоскости достаточно в одном из опорных узлов задать фазу напряжения.
25
26. Постановка задачи расчета установившегося режима
PQ-генераторPU-генератор
+1
U
U
+1
U
U
Iа
Iа
Iа
I
I
Iа
+j
+j
Ip
1
I
I
2
Ip
Ip
Ip
26
27. Постановка задачи расчета установившегося режима Peq - генератор
2728. Базисный, балансирующий и опорный узлы
Опорный узел – узел с генератором, регулирующим напряжение в узле (типPU). Уравнрение баланса Q исключается. Опорные узлы необходимо выбирать
таким образом, чтобы фазовые углы между напряжениями любого узла с PQ-генератором
или нагрузочного узла и ближайшего по “дереву” схемы опорного узла не превышал ~3035 . Это предупреждает затруднения, связанные с неоднозначностью и нарушением
условий существования решения.
Базисный узел – узел с заданным комплексом напряжения (исключаются
уравнения балансов Р и Q). Заданы модуль напряжения и его угол,
отсчитываемый от оси вещественных комплексной плоскости против часовой
стрелки, или реальная и мнимая части комплекса. Обычно комплекс напряжения в
базисном узле ориентируют по оси вещественных комплексной плоскости, тогда угол или
мнимая часть комплекса напряжения базисного узла равны нулю.
Балансирующий узел – узел, замыкающий баланс активной мощности в схеме
(исключается уравнение баланса Р). Уравнение балансирующего узла исключается
из системы узловых уравнений. Результирующий задающий ток в этом узле определяется
после расчета напряжений в узлах непосредственно по его уравнению.
(Если базисный узел одновременно является балансирующим, его целесообразно
называть базисно-балансирующим, ББУ).
NB: В базисно-балансирующем узле в отличие от балансирующего узла вектор напряжения
при итеративном решении системы уравнений не может вращаться. Это нужно учитывать
при выборе опорных узлов, если на линиях к ББУ получаются углы более 30 .
28
29. Система уравнений
При нумерации узлов, как правило, базисный узел получает последнийномер, а балансирующий — предпоследний, это позволяет избежать
перенумерации узлов при формировании системы уравнений.
Исходная система уравнений:
Y11U 1 Y12U 2 Y13U 3
J 1 ,
Y21U 1 Y22U 2 Y23U 3 Y24U 4 J 2 ,
Y31U 1 Y32U 2 Y33U 3 Y34U 4 J 3 ,
Y42U 2 Y43U 3 Y44U 4 J 4
Классическая постановка задачи расчета
установившегося режима методом узловых
напряжений не позволяет иметь несколько
балансирующих узлов, т.к. число искомых
напряжений должно быть равно числу
уравнений, но можно назначить несколько
базисно-балансирующих узлов. Однако в
этом случае необходимо корректно задать
модули и углы напряжений в этих узлах
(последовательные приближения).
Узел 4 – базисный,
узел 3 – балансирующий:
Y11U 1 Y12U 2 Y13U 3 J 1 ,
Y21U 1 Y22U 2 Y23U 3 J 2 Y24U 4 ,
Y42U 2 Y43U 3 J 4 Y44U 4 .
Узел 4 – базисно-балансирующий:
Y11U 1 Y12U 2 Y13U 3 J 1 ,
Y21U 1 Y22U 2 Y23U 3 J 2 Y24U 4 ,
Y31U 1 Y32U 2 Y33U 3 J 3 Y34U 4 .
29
30. Методы решения системы нелинейных узловых уравнений
Основными характеристиками итерационного метода являются:условия и надежность сходимости к решению, “чувствительность” к
точности начального приближения,
скорость сходимости, характеризуемая необходимым числом итераций для
получения решения с заданной точностью,
характер сходимости — апериодический или колебательный,
сложность алгоритма и потребность в ресурсах компьютера при его
реализации.
При так называемом “плоском” старте в качестве начального приближения
принимают номинальные напряжения в узлах, а вектора напряжений ориентируют на
комплексной плоскости так же, как вектор напряжения в базисном узле. Зная
напряжения в узлах, можно определить задающие токи узлов, что дает возможность
решить систему уравнений и найти новые значения напряжений. В процессе
итераций происходит поворот векторов задающих токов и напряжений на
комплексной плоскости (уточняется ориентация) и корректируются их модули,
контролируются ограничения режима регулируемых генераторов. Итерации
прекращаются по достижении заданной точности расчета.
30
31. Метод Зейделя (поузловое определение напряжений)
SS
1
Y12U 2 Y13U 3 Г1 нг1 ,
U 1
Y11
U1
S
S
1
Y21U 1 Y23U 3 Y24U 4 Г2 нг2 ,
U 2
Y
U
22
2
S нг3
U 1 Y U Y U Y U S Г3
.
3
31
1
32
2
34
4
Y
U
33
3
i 1
U i( k 1)
YijU (jk 1)
j 1
S Гi S нгi
(k )
YijU j
Ui
j i 1
n
Yii
k – номер итерации
31
32. Метод Ньютона (одновременное определение напряжений узлов)
SS
Г1
нг1 0 ,
wI 1 U 1 ,U 3 ,U 3 Y11U 1 Y12U 2 Y13U 3
3U 1
S Г 2 S нг 2
0,
wI 2 U 1 ,U 3 , U 3 Y21U 1 Y22U 2 Y23U 3 Y24U 4
3U 2
S Г 3 S нг3
wI 3 U 1 ,U 3 ,U 3 Y31U1 Y32U 2 Y33U 3 Y34U 4
0.
3U 3
S Г 1 S нг1
2
0,
wS1 U 1 ,U 3 ,U 3 Y11U 1 Y12U 2U1 Y13U 3U1
3
S Г 2 S нг 2
2
0,
wS 2 U 1 ,U 3 , U 3 Y21U1U 2 Y22U 2 Y23U 3U 2 Y24U 4U 2
3
S Г 3 S нг3
2
0.
wS 3 U 1 ,U 3 ,U 3 Y31U1U 3 Y32U 2U 3 Y33U 3 Y34U 4U 3
3
Функции балансов содержат сопряженный комплекс
напряжения, поэтому не являются аналитическими, не
имеют комплексной производной.
U U jU
U Ue j U U cos U j sin U
32
33. Запись уравнений в форме баланса токов с переменными U’ и U”
wI i g iiU i biiU i4
g ijU j bijU j
j 1,
j i
wI i
Pнгi U i U i Qнгi U i U i
3U i2
biiU i g iiU i
4
j 1,
j i
3U i2
3U i2
функция баланса
активных
составляющих
токов
,
bijU j g ijU j
Qнгi U i U i Pнгi U i U i
PГiU i Q ГiU i
Q ГiU i PГiU i
3U i2
, где U i2 U i 2 U i 2 .
функция баланса
реактивных
составляющих
токов
33
34. Запись уравнений в форме баланса мощности c переменными U,
Запись уравнений в форме баланса мощностиc переменными U,
В программах расчета установившихся режимов чаще используют систему
уравнений в форме баланса мощности с переменными U, U, при этом
функции балансов полной мощности разделяются на балансы активной и
реактивной мощностей:
δi; j -
угол, отсчитываемый от вектора напряжения i-го или j-го узла к
вектору напряжения базисного узла против часовой стрелки
Эта форма записи позволяет уменьшить порядок системы узловых
уравнений, для узлов с PU-генераторами исключаются уравнения
баланса реактивной мощности. При выходе на ограничения по Q и
смене типа генераторных узлов требуется переформирование системы
уравнений.
34
35. Запись уравнений в форме баланса мощности c переменными U,
Запись уравнений в форме баланса мощностиc переменными U,
Дальнейшего снижения трудоемкости расчета можно достигнуть с
помощью следующей замены переменных:
Ƞ = tg (δi; j / 2 )
и
1 - Ƞ2
sin δi; j = ---------- ;
1+ Ƞ2
далее
2Ƞ
cos δi; j = ---------- .
1 + Ƞ2
Тем самым устраняется необходимость многократного обращения к
подпрограммам вычисления тригонометрических функций, и далее задача
решается в переменных U , Ƞ . Окончательно фазы напряжений
в узлах определяются после сходимости к решению.
35
36.
W(k )
U
W
U
U ( k )
U
W
U ( k )
U
WI
U
WI
U
U
U
U
WU
(k )
матрица Якоби
на k-й итерации
W U ( k )
вектор поправок напряжений
U U ( k 1) U ( k )
WI
U
WI
U U ( k )
вектор небалансов
на k-й итерации
U U ( k 1) U ( k )
W U ( k )
(k )
W
U
wI( k 1)
(k )
wI 2
w( k )
I 3
wI( k 1)
(k )
wI 2
w( k )
I 3
U1 ( k 1) U1 ( k ) U1
( k 1)
(k )
U 2
U 2 U 2
U ( k 1) U ( k ) U
3
3
3
W U ( k )
U1 ( k 1) U1 ( k ) U1
U 2 ( k 1) U 2 ( k ) U 2
U ( k 1) U ( k ) U
3
3
3
k – номер итерации
36
37. Матрицы-клетки матрицы Якоби
wI 1U1
WI wI 2
U
U1
w
I 3
U1
wI 1 wI 1
U 2 U 3
wI 2 wI 2
U 2 U 3
wI 3 wI 3
U 2 U 3
wI 1 wI 1 wI 1
U
U
U
1
2
3
WI wI 2 wI 2 wI 2
U
U1 U 2 U 3
w w w
I 3
I 3
I 3
U1 U 2 U 3
wI 1 wI 1 wI 1
U
U
U
1
2
3
WI wI 2 wI 2 wI 2
U
U
U
U
1
2
3
w w w
I 3
I 3
I 3
U1 U 2 U 3
wI 1 wI 1 wI 1
U
U
U
1
2
3
WI wI 2 wI 2 wI 2
U U1 U 2 U 3
w w w
I 3
I 3
I 3
U1 U 2 U 3
37
38. Элементы матриц-клеток
Диагональные:2
wI i
PГi U i2 2U i 2QГiU i U
Pнгi U i U i Qнгi U i U i
g ii
4
2
U i
U
3U i
3U i
i
wI i
QГi U i2 2U i 2 2 PГiU i U i Pнгi U i U i Qнгi U i U i
bii
4
U i
3U i
U i
3U i2
2
wI i
QГi U i2 2U i 2 PГiU i U
Qнгi U i U i Pнгi U i U i
bii
4
U i
3U i
U i
3U i2
wI i
PГi U i2 2U i 2 2QГiU i U
Qнгi U i U i Pнгi U i U i
gii
4
U i
3U i
U i
3U i2
Недиагональные:
wI i
g ij
U j
wI i
bij
U j
wI i
bij
U j
wI i
g ij
U j
38
39. Каждая итерация состоит из нескольких шагов:
Вычисляется вектор небалансов. Если достигнута заданная точностьсведения баланса, итерации прекращаются.
2. Вычисляются элементы матрицы Якоби с контролем ограничений
режима регулируемых генераторов.
3. Решается система уравнений методом Гаусса и определяется вектор
поправок.
4. Определяются напряжения узлов.
1.
39
40. Расчет установившегося режима без балансирующего узла
Y11U 1 Y12U 2 Y13U 3J 1 ,
Y21U 1 Y22U 2 Y23U 3 Y24U 4 J 2 ,
Y31U 1 Y32U 2 Y33U 3 Y34U 4 J 3 ,
Y42U 2 Y43U 3 Y44U 4 J 4
Используется полная исходная система узловых
уравнений. Эта система уравнений
преобразуется к системе из 8 уравнений
балансов активных и реактивных составляющих
токов или мощностей.
В базисном узле фиксируется только
положение вектора напряжения (угол или
мнимая составляющая).
Обычно совмещают вектор напряжения в базисном узле (узел 4) с осью
вещественных, тогда угол или мнимая составляющая комплекса напряжения в
этом узле равна нулю. Число переменных получается на единицу меньше числа
уравнений. Вместо нее вводится новая переменная — относительное отклонение
частоты от номинальной
f f ном
f *
f ном
Система уравнений для определения поправок реальной и мнимой
составляющих напряжений и отклонения частоты принимает вид:
40
41.
wI 1U
1
wI 3
U1
w
I 4
U1
wI 1
U 3
wI 3
U 3
wI 4
U 3
wI 1
f *
U1
wI 1
wI 3
U 3
wI 3
f *
f
w
wI 4
*
I 4
f *
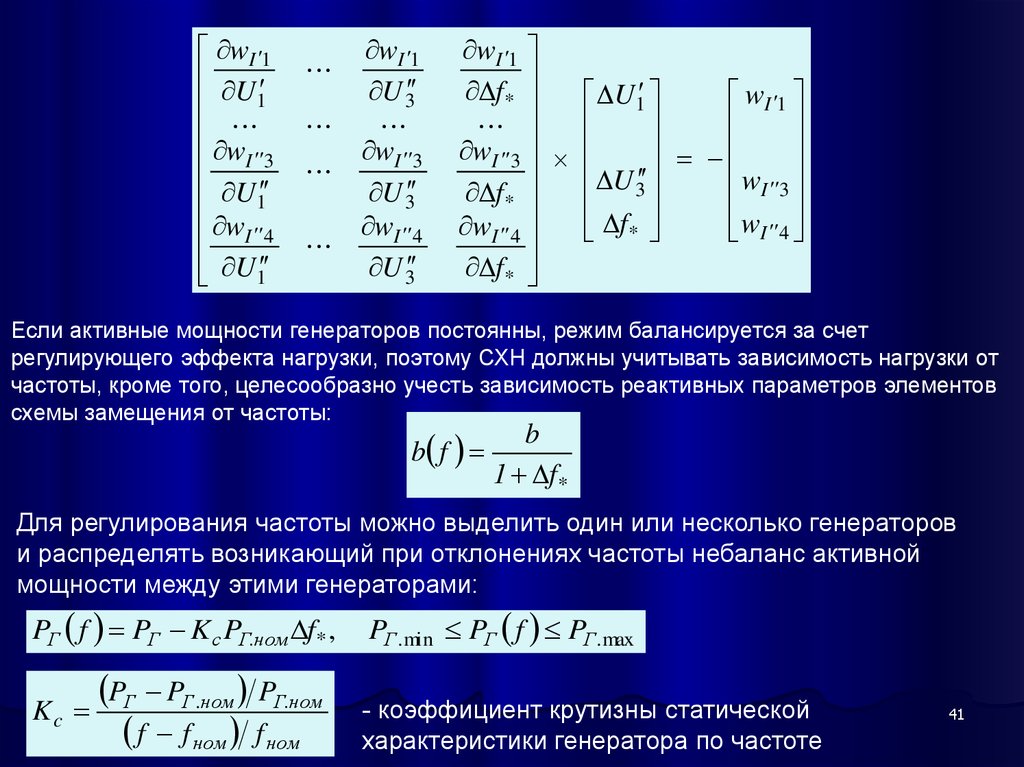
Если активные мощности генераторов постоянны, режим балансируется за счет
регулирующего эффекта нагрузки, поэтому СХН должны учитывать зависимость нагрузки от
частоты, кроме того, целесообразно учесть зависимость реактивных параметров элементов
схемы замещения от частоты:
b
b f
1 f *
Для регулирования частоты можно выделить один или несколько генераторов
и распределять возникающий при отклонениях частоты небаланс активной
мощности между этими генераторами:
PГ f PГ K с PГ.ном f* ,
Kc
PГ PГ .ном PГ.ном
f f ном f ном
PГ .min PГ f PГ .max
- коэффициент крутизны статической
характеристики генератора по частоте
41
42. Метод эквивалентных преобразований
Если заданы параметры элементов схемы замещения, причемгенерация и нагрузка представлены реальными источниками ЭДС
(тока), напряжения узлов и токи продольных и поперечных ветвей
схемы можно найти, используя эквивалентные преобразования
схемы замещения.
Преобразование является эквивалентным, если электрические
режимы узлов и ветвей в непреобразованной части схемы до и
после какого-либо эквивалентного преобразования одинаковы.
Задачу сведения балансов токов (балансов активной и
реактивной мощностей в узлах схемы) при итеративном расчете
установившегося режима с использованием метода эквивалентных
преобразований можно решить, если найти способ регулирования
источников ЭДС на поддержание заданных уставок активной
мощности и напряжения в процессе итераций.
42
43. Метод эквивалентных преобразований
Характеристики:Безматричный метод, не требует формирования, хранения и обработки
слабозаполненных матрицы узловых проводимостей и матрицы Якоби при
решении системы узловых уравнений.
Применим для расчета как установившихся режимов, так и мгновенных
(на шаге численного интегрирования) электрических режимов при расчете
электромеханических переходных процессов.
Позволяет построить компактный алгоритм и вычислительное ядро
программы в комплексном виде.
Обеспечивает простую и эффективную обработку разделения схемы на
произвольное число частей, вплоть до отключения отдельных узлов, с
последующим поочередным или одновременным слиянием частей.
Позволяет реализовать корректное эквивалентирование схемы
исключением части узлов, поскольку в основе самого метода расчета
установившегося режима лежит исключение узлов.
Обладает надежной сходимостью при балансировании установившихся
режимов и дает однозначное решение за счет применения адекватной PEqмодели генератора. Эта модель органично связана с динамической
моделью генератора, обеспечивая корректный расчет начальных условий
на основе векторной диаграммы генератора.
43
44. Метод эквивалентных преобразований
Не критичен к начальному приближению, от начальногоприближения слабо зависит число итераций, необходимых для
поворота векторов ЭДС на требуемые углы при балансировании
установившегося режима.
Предоставляет полный и точный контроль ограничений режима
генераторов при балансировании установившегося режима.
Дает возможность реализовать различные законы управления
регулируемыми компенсирующими устройствами в ходе
итеративного балансирования режима с полным и точным
контролем ограничений их режима.
Недостатком метода эквивалентных преобразований является
большое число итераций, необходимое для балансирования
установившегося режима, по сравнению с решением системы
узловых уравнений методом Ньютона. На расчет задачи может
потребоваться несколько сотен итераций.
44
45. Метод эквивалентных преобразований
Расчет электрического режима методом эквивалентныхпреобразований состоит из следующих этапов:
Замещение рассматриваемой электрической схемы
эквивалентным источником тока в узле свертки (свертка схемы
к одному из узлов).
Определение напряжения в узле свертки (при расчете
мгновенного электрического режима в процессе
интегрирования) из условия, что ток эквивалентного источника
тока в узле свертки равен нулю. Или определение тока
эквивалентного источника, включенного в базисный узел,
выбранный за узел свертки, при расчете установившегося
режима.
Определение напряжений в узлах при развертывании схемы в
порядке, обратном исключению узлов.
Расчет электрического режима продольных и поперечных
элементов схемы.
45
46. Эквивалентные преобразования
Для свертки схемы необходимы следующие эквивалентныепреобразования:
замена параллельных ветвей одной эквивалентной
ветвью
исключение узла слиянием узлов ветви с нулевым
сопротивлением (включенного выключателя)
исключение узла при помощи преобразования активной
многолучевой звезды в эквивалентный многоугольник
46
47. Слияние узлов включенного выключателя
jYkn
Yjm
i
j
k
Yim
n
m
k
Ykn
Yjm
Yln
l
m
i
l
Yln
Yim
Ym0
Jm0
0
Yn0
0
а)
Jn0
Ymn0
Jmn0
0
б)
Хорошо работает и обычное замещение ветви выключателя очень небольшим и
очень большим сопротивлением во включенном и отключенном состояниях
47
48. Исключение одиночного узла
jj
j
Jm0
Jm0
Yjm
Yjm
m
i
Yim
Jm0
Ymn
m
i
Inm
Ym0 0
Yjm
Yim
Inm Ym0 0
Zmn
Yim
Ym0 0
Inm
n
n
Zn0
Yn0
m
i
Jn0
0
(n)
(n)
Ym0
e
E n0
Jm0
0
0
а)
б)
в)
Примечание. Это частный случай исключения узла при помощи более общего
преобразования активной многолучевой звезды в эквивалентный многоугольник
48
49. Исключение узла преобразованием активной многолучевой звезды в эквивалентный многоугольник
ii
2
j
Zin
Z2n
1
m
n
j
Zjm
Z12
Zjn
Z1n
Zij
2
Zie
1
m
Zmn
Z1e
Zn0
Zme
e
e
E n0
E n0
0
0
б)
a)
i
2
Yin
Y2n
Ji0,Yi0
j
i
J20,Y20
Yjn
1
2
Yij
j
Jj0,Yj0
m
n
Y1n
Yn0
Ymn
1
Jn0
J10,Y10
m
Jm0,Ym0
49
0
в)
г)
50. Исключение узла преобразованием активной многолучевой звезды в эквивалентный многоугольник
Yij( n )Yij
YinY jn
Ynn
Yi(0n)
Yin
Yn0
Ynn
Yin
(n)
J i 0 J n0
Ynn
Ynn Y1n Y2n ... Yin Y jn ... Ymn Yn0
Следует подчеркнуть, что преобразование активной многолучевой звезды
в эквивалентный многоугольник не существует, если генерация и/или
нагрузка в исключаемом узле представлена идеальными источниками
тока, поскольку для получения формул использовалось преобразование
источника тока в источник ЭДС и обратно.
Для идеальных источников тока и ЭДС взаимное преобразование не
определено, их воздействие на режим схемы различно — в узле с
идеальным источником ЭДС напряжение постоянно, а в узле с идеальным
источником тока — нет. Если формально выполнить исключение узла с
идеальным источником тока, искажается режим внешней сети,
примыкающей к узлам, смежным исключаемому узлу. Это проявляется в
том, что потери мощности в ветвях исходной и эквивалентной схем не
совпадают.
50
51. Регулирование Peq -генераторов
.,
S P jQ 3UI 3U ( E U )Y 3UE Y 3U 2Y
P 3EUy cos( E U Y ) 3U 2 g
Q 3EUy sin( E U Y ) 3U 2b
E Ee j E
U
U Ue j U
U Ue j U
Y
1
g jb ye j Y
Zq
y g 2 b2
3Ey cos E U 9 E 2 y 2 cos2 E U 12bQ
6b
Разложив выражения для активной мощности и напряжения в
ряд Тейлора, можно получить линеаризованную систему
уравнений для определения поправок модуля и угла вектора
ЭДС при регулировании генератора на поддержание заданных
уставок активной мощности и напряжения
51
52. Регулирование Peq -генераторов
.Регулирование Peq -генераторов
,
P
P
E P0 P,
E
E
E
U
U
E E E U 0 U ,
E
52
53. Регулирование генераторов
+1E
E
jxq I
E
U , U 0
2
E
E
E
U
2
U
I
I
+j
53
54. Регулирование генераторов
Выполняется итерация. После итерации модуль вектора напряжения в узле уменьшился,а по углу повернулся на угол по часовой стрелке (красный цвет). Определяются:
1)
P jQ 3UI 3U E U Y
2) отклонения
P0 P U 0 U
3) поправки
E E
4)
Процесс балансирования приобретает
физический смысл – регулирование генераторов
при безынерционном изменении возбуждения и
положения ротора генератора
E Complex E E cos E E , E E sin E E
xd xq
xd
Eq
E
U cos E U Eq min Eq Eq max
xq
xq
При выходе на ограничения ЭДС Eq фиксируется, но реактивная мощность остается
свободным параметром режима. При перегрузке генератора по току статора
уменьшается Eq, если она не вышла на нижнее ограничение, в противном случае
уменьшается активная мощность. Таким образом, выполняется полный и точный
контроль по ограничениям режима генератора, т.е. балансирование режима схемы
осуществляется с контролем возможности существования режима самих генераторов.
NB: с расчетчика снимается обязанность контроля реактивной
мощности генераторов.
54
55. Определение предельных перетоков по линиям и сечениям методом непрерывного утяжеления режимов
Теория статической апериодическойустойчивости – самостоятельно по книге
Г.В.Меркурьев, Ю.М.Шаргин Устойчивость
энергосистем, изд. 2
55
56.
Определение предельных перетоков по линиям исечениям методом непрерывного утяжеления режимов
6316
1316
ПС Восточная
6301
ЛАЭС330
ОЭС Северо-Запада
Сеть 330, 220, 110 кВ
1376
6376
ЛАЭС750
6319
Гатчина
Кингиссеп
ЭстГРЭС
6632
Киришская ГРЭС
6342
6341
ОЭС
Балтии
Сечение 1
ПС Ленинградская
КАЭС750
470
Опытная
6370
6442
Бал.ЭС
6631
Окуловка
6449
81
Бологое
458
Владимирская
5555
459
Сечение 3
1442
1330
1449
504 Рославль
Сечение 2
Игн.АЭС
6840
БУ
Чудово
6330
ОЭС
Центра
506 Талашкино
520 Голынки
6836
1
6831
519
САЭС750
Сечение 4
6952
6933
6960
6934
6940
6935 1935 Вит.110
Кричев Витебск
ОЭС Беларуси
6965
Белорусская
56
57. Определение предельных перетоков по линиям и сечениям методом непрерывного утяжеления режимов
Нужно найти предельный переток по линии 6370-470 ПС Ленинградская – КалининскаяАЭС 750 кВ и в сечении 1, 2, в которые входят также линии 330 и 110 кВ.
Генерация электростанций ОЭС Северо-Запада, задействованных в изменении режима
схемы, в исходном режиме составляет:
ЛАЭС — 2000 МВт: первая очередь (узел 1316) не работает; вторая очередь (узел 1376)
работают четыре агрегата по 500 МВт, суммарная мощность 2000 МВт.
Киришская ГРЭС — 900 МВт, работают три агрегата по 300 МВт.
ОЭС Балтии принимает из ОЭС Северо-Запада 534 МВт по сечению 3. ОЭС Белоруссии
принимает 1332 МВт по сечению 4 из ОЭС Центра. В подпорном узле 470 на Калининской
АЭС работает один энергоблок на номинальной мощности 1000 МВт.
Загрузка сечений осуществляется за счет разгрузки второй очереди ЛАЭС до 1000
МВт по линейному закону за 1000 шагов со скоростью 1 МВт/шаг, Киришская ГРЭС
разгружается от 900 до 500 МВт за 2000 шагов со скоростью 0,2 МВт/шаг.
До середины процесса утяжеления режима скорость перераспределения генерации
активной мощности между Северо-Западом и Центром составляет 1,2 МВт/шаг. После
завершения разгрузки ЛАЭС при приближении к предельному режиму и при
нарушении апериодической устойчивости скорость перераспределения баланса
мощности составляет 0,2 МВт/шаг, что обеспечивает плавное "сползание" режима с
четким обозначением предельных перетоков по сечениям 1 и 2.
57
Файл nw272_ss