 Физика
ФизикаПохожие презентации:

")








Кинематика. Кинематика точки. Примеры
1.
КинематикаКинематика точки. Примеры
– Определение кинематических характеристик по заданному закону движения
– Определение скоростей и ускорений точек спарника
– Кинематика точек кривошипно-шатунного механизма
– Качение колеса без проскальзывания
– Кинематика точки кулисного механизма
– 1 Кинематика точки в криволинейных координатах (декартовые координаты)
– 2 Кинематика точки в криволинейных координатах (сферические координаты)
– 3 Кинематика точки в криволинейных координатах (цилиндрические координаты)
2.
КинематикаКинематика точки. Примеры
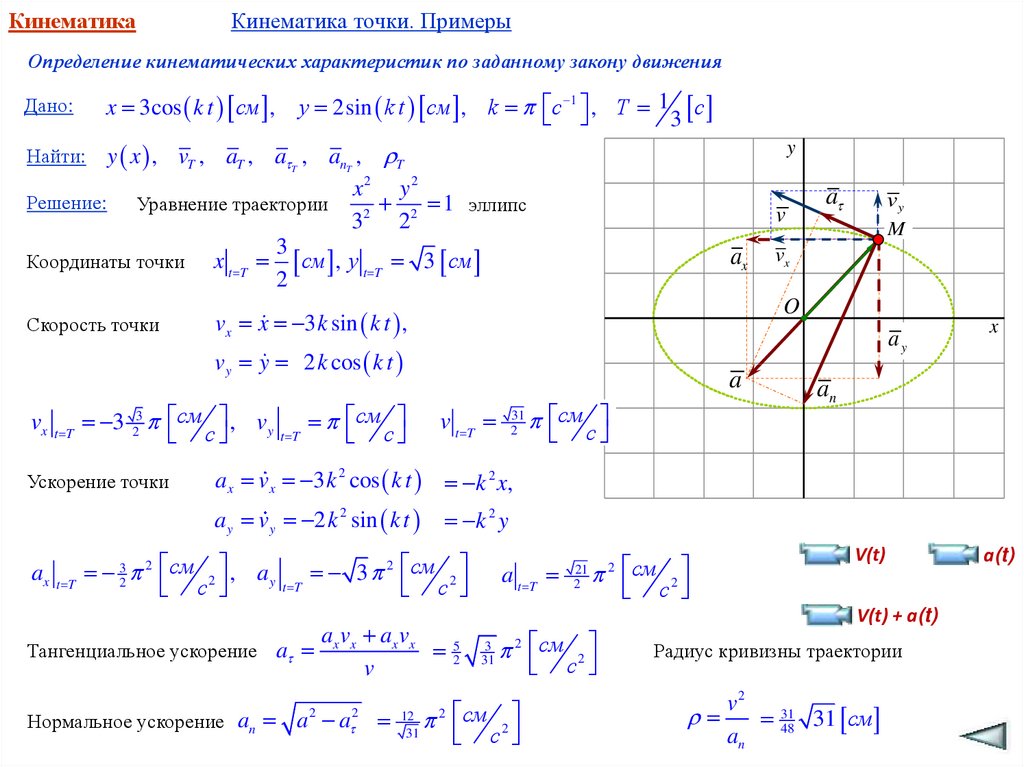
Определение кинематических характеристик по заданному закону движения
Дано:
x 3cos k t см ,
y 2sin k t см , k с 1 , T 1 c
3
y x , vT , aT , a T , anT , T
x2 y 2
Решение: Уравнение траектории
1 эллипс
32 22
3
Координаты точки x t T см , y t T 3 см
2
y
Найти:
Скорость точки
v
ax
a
v t T
31
2
ax vx 3 k 2 cos k t
k 2 x,
a y v y 2 k 2 sin k t
k 2 y
ax t T 23 2 см 2 , a y
с
t T
3 2 см 2
с
a v a x vx
Тангенциальное ускорение a x x
v
Нормальное ускорение an
a a
2
2
12
31
vx
ay
v y y 2 k cos k t
Ускорение точки
vy
M
O
vx x 3 k sin k t ,
vx t T 3 23 см , vy
см
t T
с
с
a
см с
a t T
an
21
2
см 2
с
2
V(t)
V(t) + а(t)
5
2
3
31
2 см 2
2 см 2
с
x
с
Радиус кривизны траектории
v2
31
48
31 см
an
а(t)
3.
КинематикаvM
Кинематика точки. Примеры
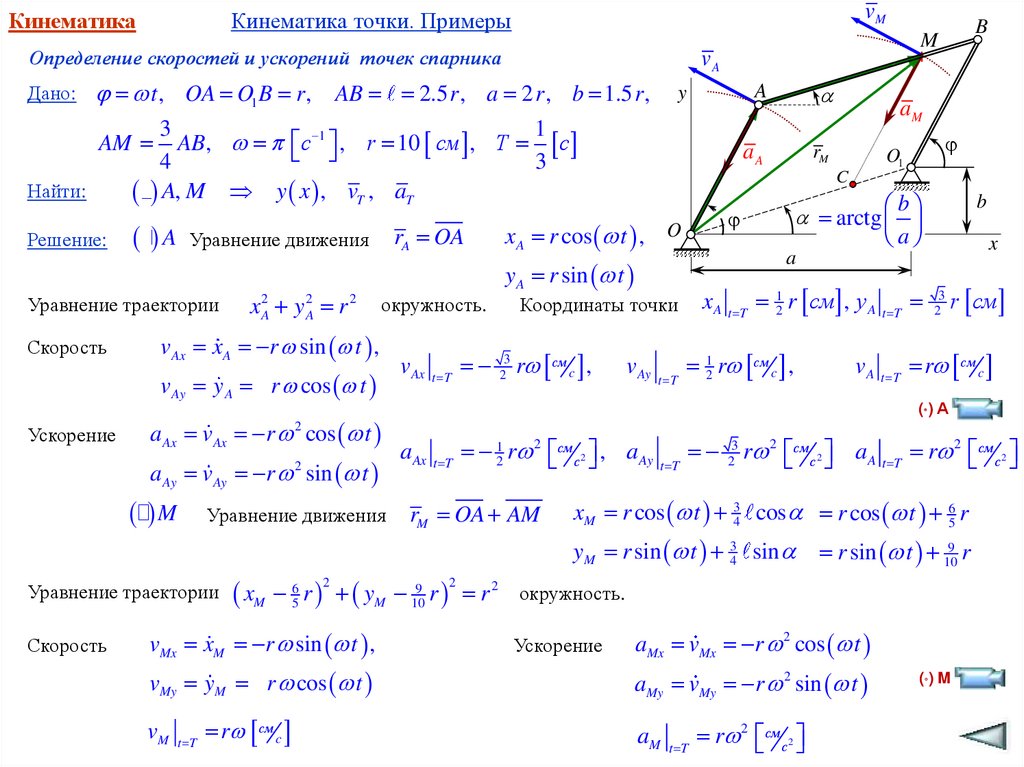
Определение скоростей и ускорений точек спарника
Дано:
vA
t , OA O1 B r , AB 2.5 r , a 2 r , b 1.5 r ,
y
3
1
AB, с 1 , r 10 cм , T c
4
3
A, M y x , vT , aT
AM
Найти:
Решение:
A
Уравнение траектории
Скорость
rA OA
Уравнение движения
xA2 y A2 r 2
v Ay y A r cos t
Ускорение
a Ax vAx r cos t
r см c ,
rM
O1
v Ay
t T
b
a
b
arctg
a
xA t T 12 r см , y A t T
Координаты точки
3
2
aA
aM
12 r см c ,
x
3
2
r см
v A t T r см c
( ) А
2
a Ay vAy r 2 sin t
M
Уравнение движения
Уравнение траектории
Скорость
v Ax t T
y A r sin t
v Ax x A r sin t ,
A
C
xA r cos t , O
окружность.
B
M
+
2
vMy yM r cos t
t T
rM OA AM
xM 65 r yM 109 r
vMx xM r sin t ,
vM
aAx t T 12 r 2 см с2 , aAy
t T
r см c
2
3
2
r 2 см с2 aA t T r 2 см с2
xM r cos t 43 cos r cos t 65 r
yM r sin t 43 sin
r sin t 109 r
r 2 окружность.
Ускорение
aMx vMx r 2 cos t
aMy vMy r 2 sin t
aM
t T
r 2 см с2
( ) M
4.
КинематикаКинематика точки. Примеры
vA
vM
1
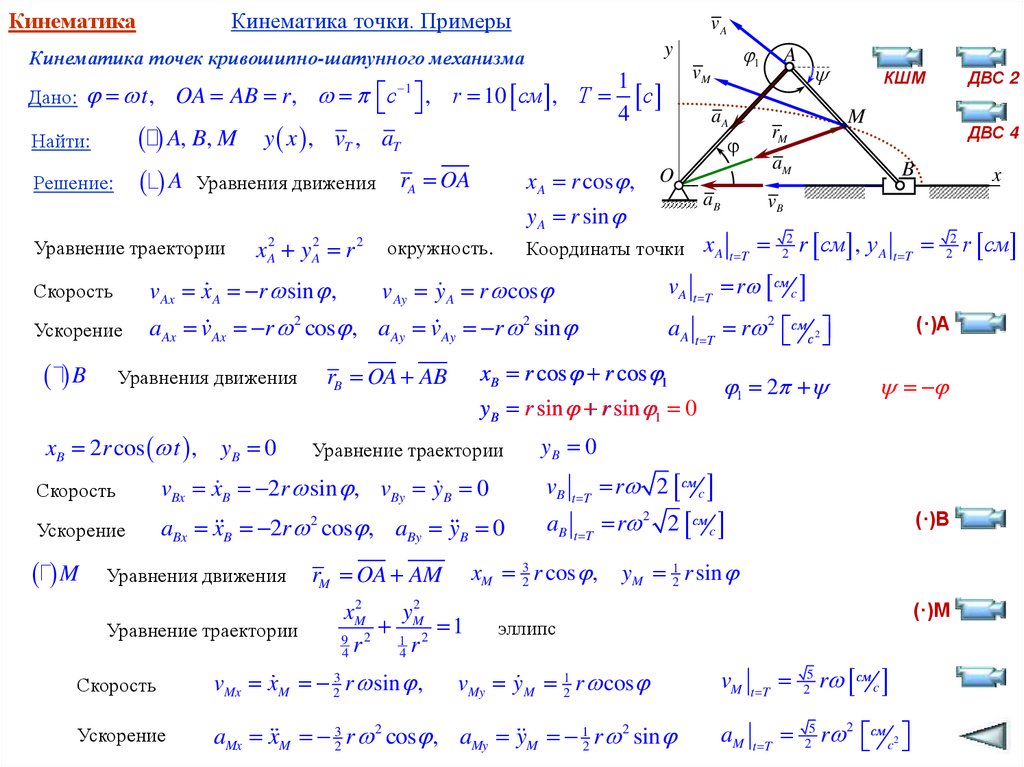
Дано: t , OA AB r , с , r 10 cм , T c
4
A, B, M y x , vT , aT
Найти:
1
A
Решение:
Уравнения движения
x A r cos ,
rA OA
xA2 y A2 r 2
Скорость
v Ax x A r sin ,
Ускорение
aAx vAx r 2 cos , aAy vAy r 2 sin
B
Уравнения движения
xB 2r cos t ,
yB 0
Ускорение
aBx xB 2r 2 cos , aBy yB 0
Уравнение траектории
xM2
yM2
1 2 1
9 2
r
4
4r
x
vB
t T
2
2
r см , y A t T
2
2
1 2
yB 0
aB t T r 2 2 см c
xM 23 r cos ,
rM OA AM
B
vB t T r 2 см c
vBx xB 2r sin , vBy yB 0
Уравнения движения
ДВС 4
(·)A
yB r sin r si
sin
n 1 0
Скорость
M
M
aA t T r 2 см с2
xB r cos r cos 1
Уравнение траектории
ДВС 2
v A t T r см c
v Ay y A r cos
rB OA AB
КШМ
aM
O
aB
rM
Координаты точки xA
окружность.
A
aA
y A r sin
Уравнение траектории
1
y
Кинематика точек кривошипно-шатунного механизма
(·)В
yM 12 r sin
(·)М
эллипс
Скорость
vMx xM 23 r sin ,
vMy yM 12 r cos
Ускорение
aMx xM 23 r 2 cos , aMy yM 12 r 2 sin
vM
t T
aM
t T
5
2
r см c
5
2
r 2 см c2
r см
5.
КинематикаКинематика точки. Примеры
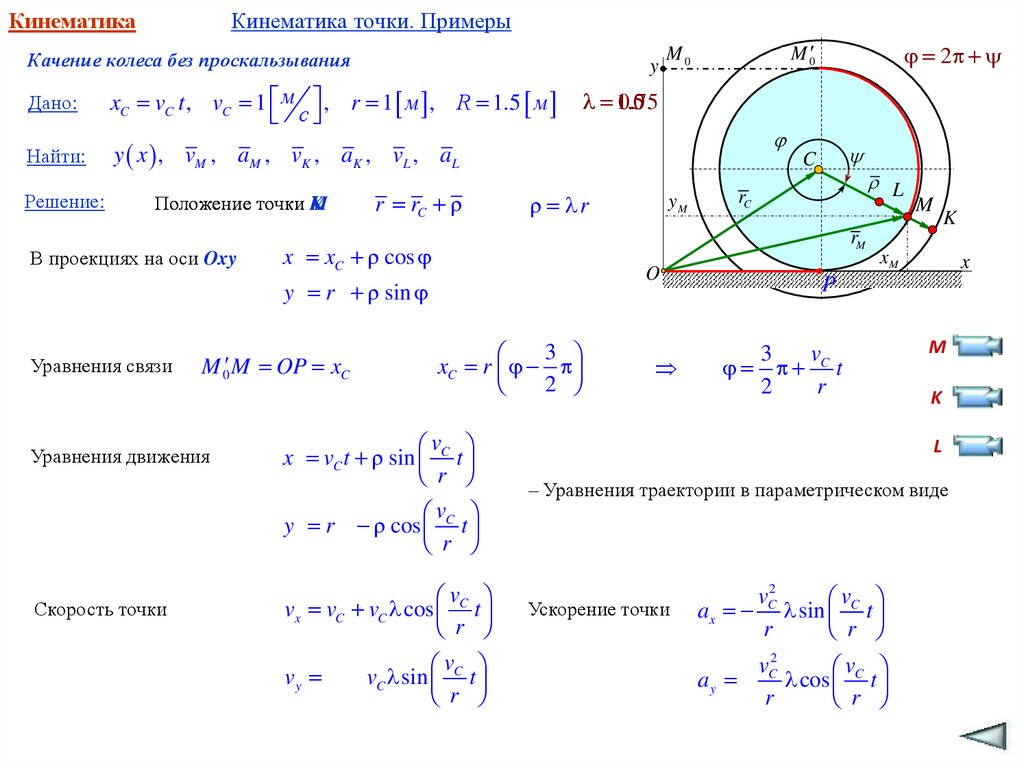
Качение колеса без проскальзывания
y
Дано:
xC vC t , vC 1 м , r 1 м , R 1.5 м
с
Найти:
y x , vM , a M , v K , a K , v L , a L
Решение:
Положение точки L
K
M
В проекциях на оси Oxy
r rC
Уравнения движения
Скорость точки
C
r
yM
L
rC
rM
x xC cos
M 0 M OP
OP xC
2
1.5
1.0
0.75
O
y r sin
Уравнения связи
M 0
M0
3
xC r
2
v
x vC t sin C t
r
v
y r cos C t
r
v
vx vC vC cos C t
r
v
vy
vC sin C t
r
M
K
xM
x
P
v
3
C t
2
r
M
K
L
– Уравнения траектории в параметрическом виде
Ускорение точки
vC2
v
ax sin C t
r
r
vC2
v
a y cos C t
r
r
6.
КинематикаКинематика точки. Примеры
v
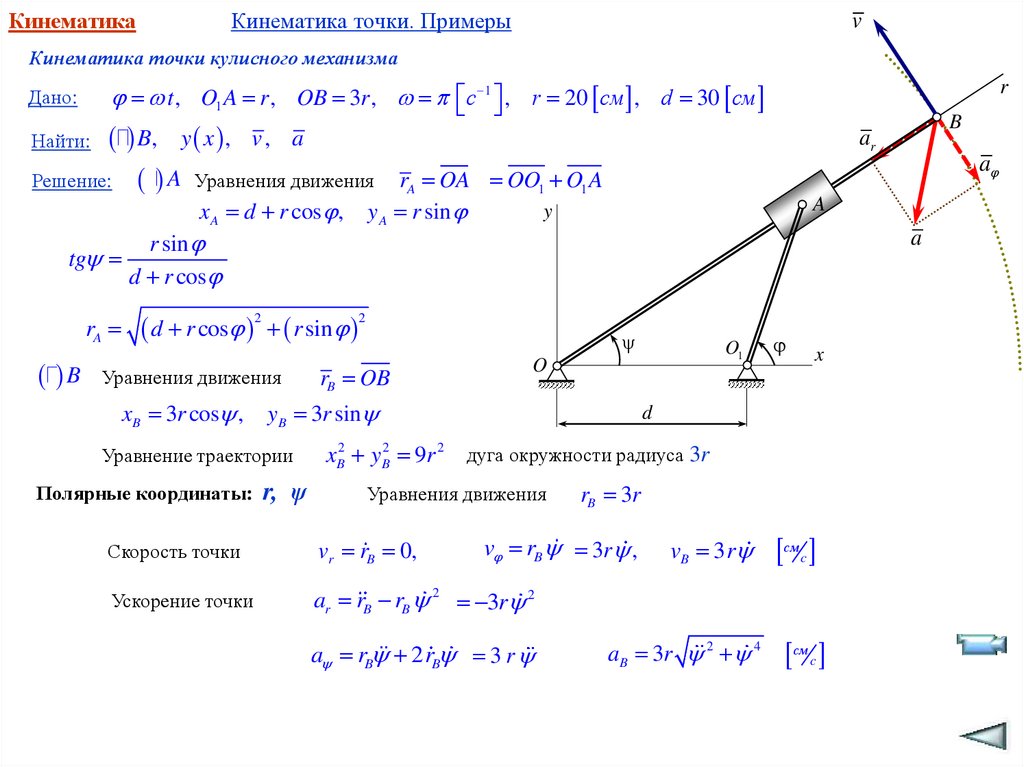
Кинематика точки кулисного механизма
t , O1 A r , OB 3r , с 1 , r 20 cм , d 30 cм
Дано:
Найти:
Решение:
B,
y x , v , a
A
rA
B
B
ar
a
rA OA OO1 O1 A
y
y A r sin
Уравнения движения
x A d r cos ,
tg
r
r sin
d r cos
a
d r cos r sin
2
Уравнения движения
xB 3r cos ,
2
rB OB
r, ψ
O1
O
yB 3r sin
Уравнение траектории
Полярные координаты:
A
x
d
xB2 yB2 9r 2 дуга окружности радиуса 3r
Уравнения движения
rB 3r
v rB 3r ,
Скорость точки
vr rB 0,
Ускорение точки
ar rB rB 2 3r 2
a rB 2 rB 3 r
vB 3 r
aB 3r 2 4
см c
см c
7.
КинематикаКинематика точки. Примеры
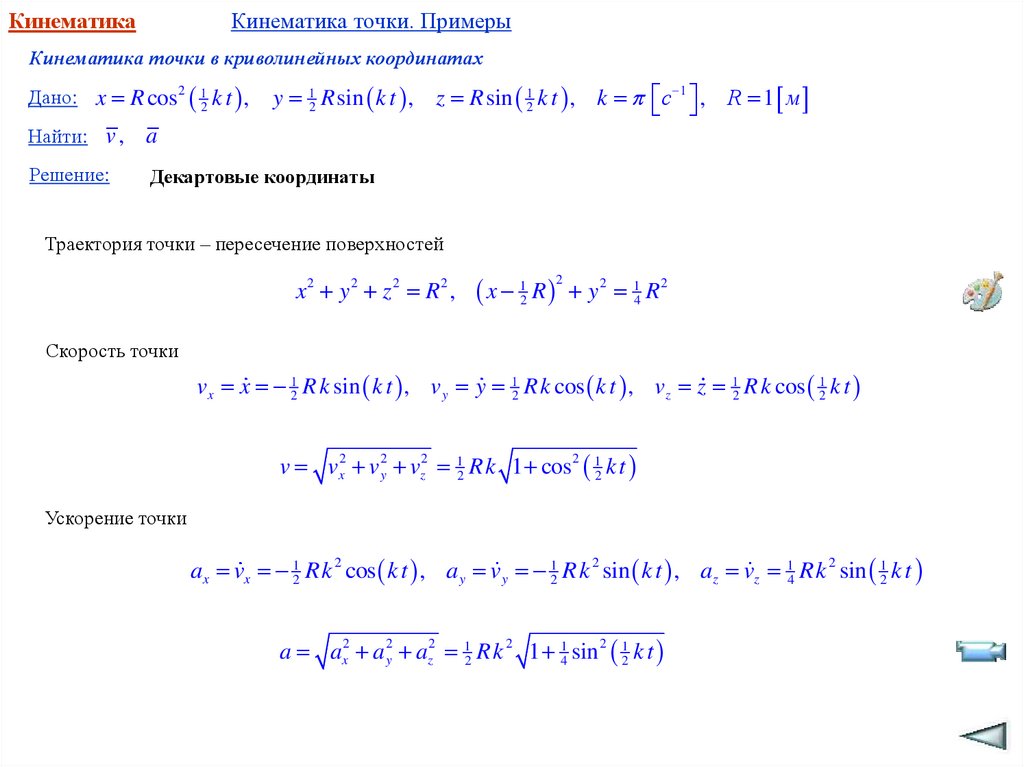
Кинематика точки в криволинейных координатах
Дано: x R cos 2 12 k t ,
y 12 R sin k t , z R sin 12 k t , k с 1 , R 1 м
Найти: v ,
a
Решение:
Декартовые координаты
Траектория точки – пересечение поверхностей
x2 y 2 z 2 R2 ,
x 12 R
2
y 2 14 R 2
Скорость точки
vx x 12 R k sin k t , v y y 12 R k cos k t , vz z 12 R k cos 12 k t
v vx2 v y2 vz2 12 R k 1 cos2 12 k t
Ускорение точки
ax vx 12 Rk 2 cos k t , ay vy 12 Rk 2 sin k t , az vz 14 Rk 2 sin 12 k t
a ax2 a y2 az2 12 R k 2 1 14 sin 2 12 k t
8.
КинематикаКинематика точки. Примеры
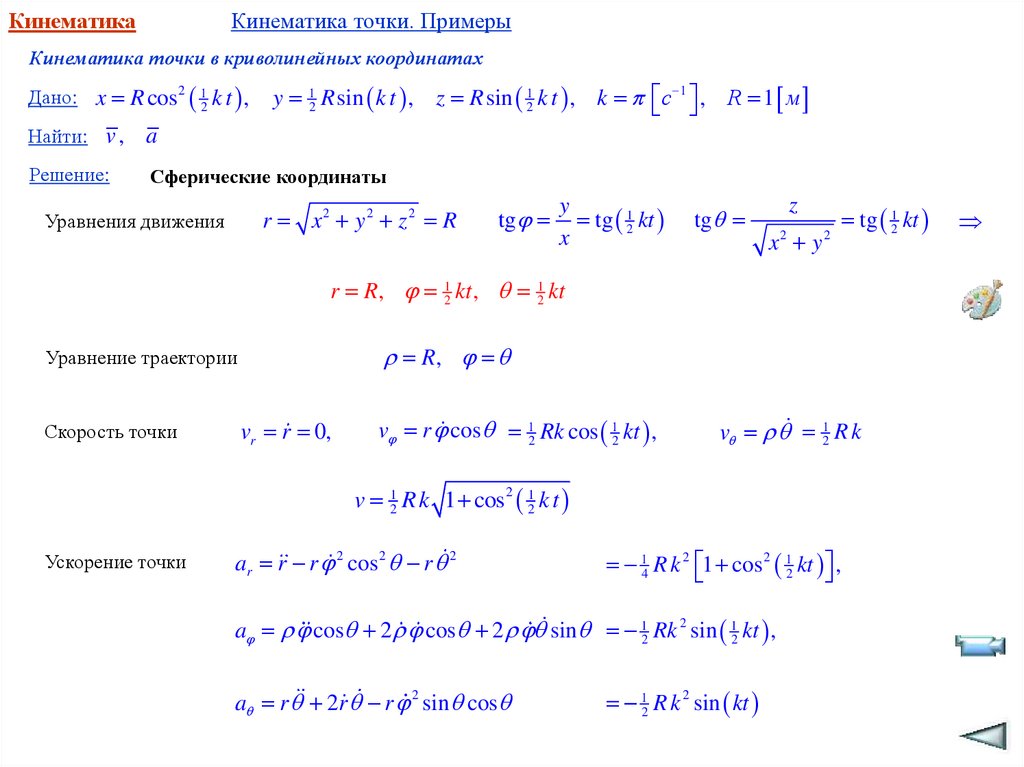
Кинематика точки в криволинейных координатах
Дано: x R cos 2 12 k t ,
y 12 R sin k t , z R sin 12 k t , k с 1 , R 1 м
Найти: v ,
a
Решение:
Сферические координаты
r x2 y 2 z 2 R
Уравнения движения
tg
y
tg 12 kt
x
tg
z
x2 y 2
tg 12 kt
r R, 12 kt , 12 kt
R,
Уравнение траектории
Скорость точки
vr r 0,
v r cos 12 Rk cos 12 kt ,
v 12 R k
v 12 R k 1 cos2 12 k t
Ускорение точки
ar r r 2 cos 2 r 2
14 R k 2 1 cos 2 12 kt ,
a cos 2 cos 2 sin 12 Rk 2 sin 12 kt ,
a r 2r r 2 sin cos
12 R k 2 sin kt
9.
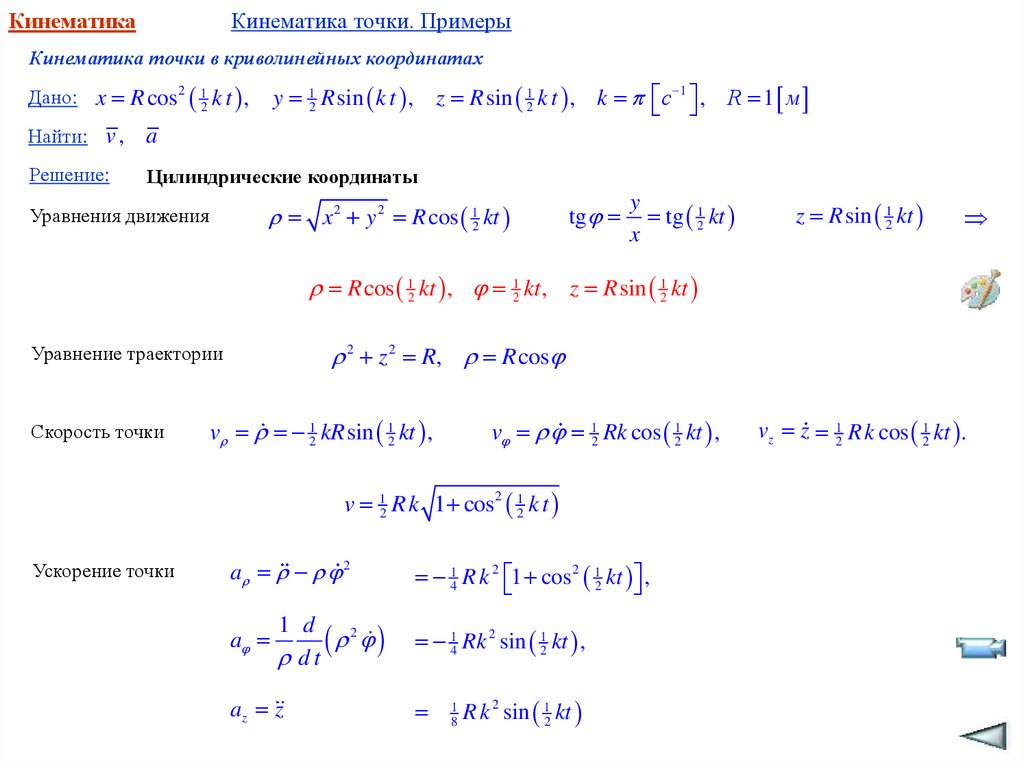
КинематикаКинематика точки. Примеры
Кинематика точки в криволинейных координатах
y 12 R sin k t , z R sin 12 k t , k с 1 , R 1 м
Дано: x R cos 2 12 k t ,
Найти: v ,
a
Решение:
Цилиндрические координаты
x 2 y 2 R cos 12 kt
Уравнения движения
tg
y
tg 12 kt
x
z R sin 12 kt
R cos 12 kt , 12 kt , z R sin 12 kt
2 z 2 R, R cos
Уравнение траектории
Скорость точки
v 12 kR sin 12 kt ,
v
12 Rk cos 12 kt ,
v 12 R k 1 cos2 12 k t
Ускорение точки
a 2
a
1 d
2
dt
az z
14 R k 2 1 cos 2 12 kt ,
14 Rk 2 sin 12 kt ,
1
8
R k 2 sin 12 kt
vz z 12 R k cos 12 kt .