













 Физика
ФизикаПохожие презентации:


")


")
")
")

")
Физика – наука о наиболее общих формах движения материи и их взаимных превращениях. Лекция №1
1.
Лекция №1Лектор: доцент, к.ф.-м.н., Каевицер
Екатерина Владиленовна
E-mail: katrin125@mail.ru
Телефон: +7-916-112-61-40
2.
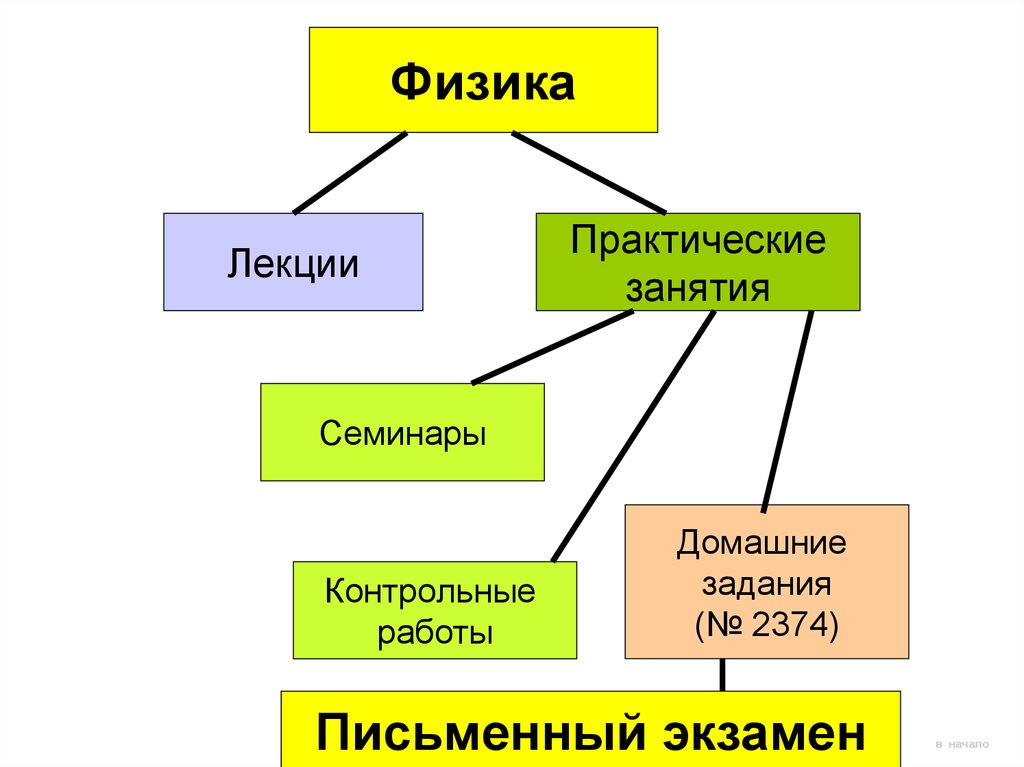
ФизикаЛекции
Практические
занятия
Семинары
Контрольные
работы
Домашние
задания
(№ 2374)
Письменный экзамен
в начало
3. Физика – наука о наиболее общих формах движения материи и их взаимных превращениях
Физика – наука о наиболее общих формахдвижения мат ерии и их взаимных превращениях
Разделы: МЕХАНИКА. МОЛЕКУЛЯРНАЯ ФИЗИКА
Литература Основная:
1. Савельев И.В. “Курс общей физики”,
2. Волькенштейн В.С. “Сборник задач по общему курсу
физики”.
Дополнительная:
Иродов И.Е. “Механика. Основные законы”,
“Физика макросистем. Основные законы”.
Сивухин Д.В. том 1 “Механика”,
том 2 “Термодинамика и молекулярная физика”.
4.
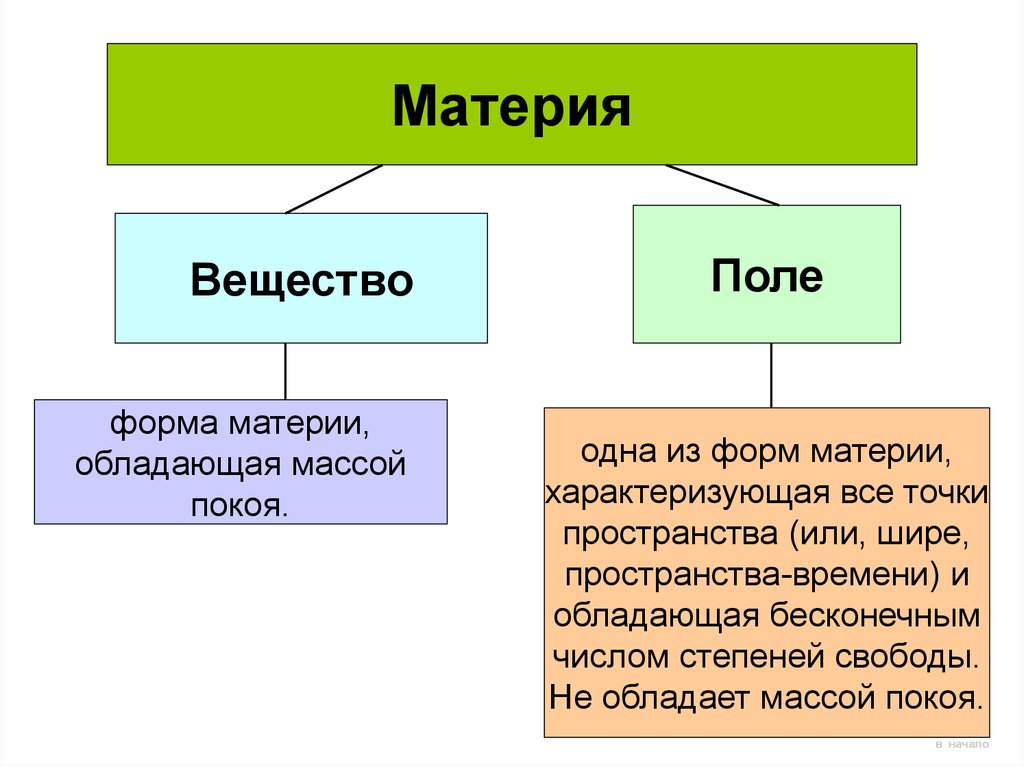
МатерияВещество
форма материи,
обладающая массой
покоя.
Поле
одна из форм материи,
характеризующая все точки
пространства (или, шире,
пространства-времени) и
обладающая бесконечным
числом степеней свободы.
Не обладает массой покоя.
в начало
5. Разделы механики
• Кинематика: изучает движение тел, нерассматривая причины, которые это
движение обуславливают.
• Динамика: изучает законы движения
тел, которые вызывают или изменяют
это движение из-за взаимодействиями
между телами.
• Статика: изучает законы равновесия
системы тел.
6. Механическое движение –изменение положения одних тел или частей тел относительно других тел или других частей
Механическое движение –изменение положения одних
тел или частей тел
относительно других тел или
других частей
• принцип относительности движения
• пространство
• время
7. Модели тел
• Материальная точка - тело, размерами которогов данной задаче можно пренебречь.
• Абсолютно твердое тело - тело, деформациями
которого можно пренебречь.
• Абсолютно упругое тело - тело, которое после
прекращения действия внешних сил принимает
свои первоначальные размеры и форму.
• Абсолютно неупругое тело - тело, полностью
сохраняющее деформированное состояние после
прекращения действия внешних сил.
8. Координаты
• набор чисел, однозначноописывающий положение точки в
пространстве
Размерность пространства
• минимальное количество координат
Система координат
• закон задания координат
9. Системы координат
• Декартова прямоугольнаяz
rz
r
y
0 ry
x
rx
10. Системы координат
• Цилиндрическаяz
rz z
rx cos
r
0
rx
x
ry
ry sin
y
rz z
11.
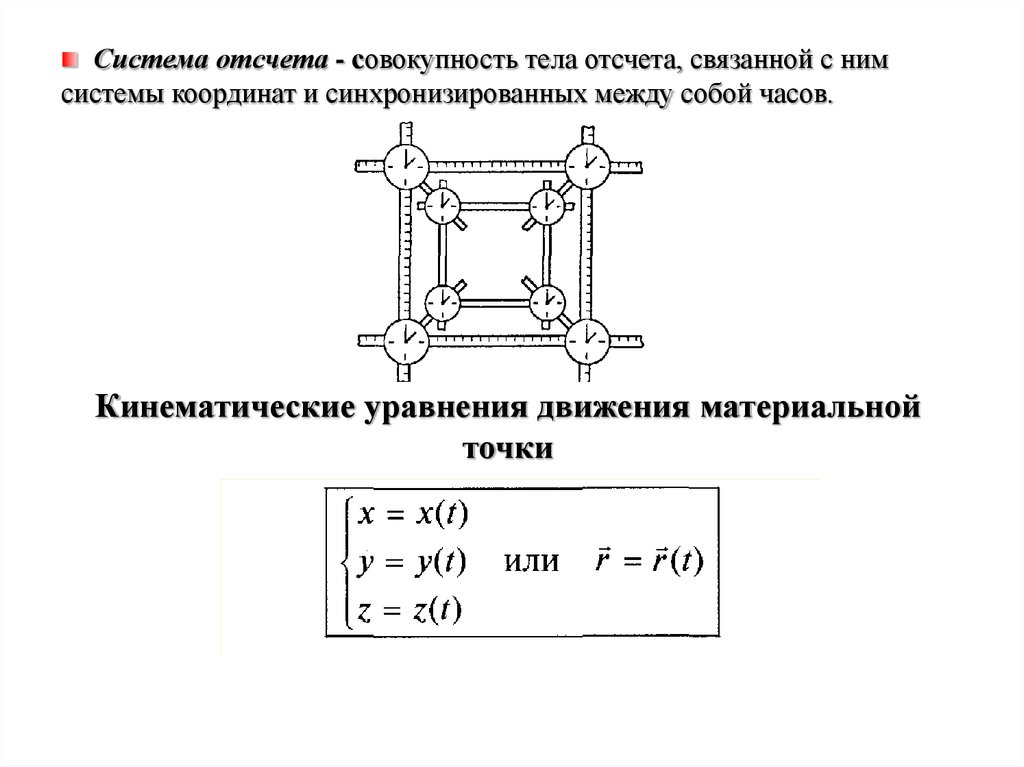
Система отсчета - совокупность тела отсчета, связанной с нимсистемы координат и синхронизированных между собой часов.
Кинематические уравнения движения материальной
точки
12.
Кинематикаматериальной точки.
Кинематика твердого
тела
13. Некоторые обозначения
Приращение (изменение)величины A:
Модуль вектора
A
A
A
К
Н
A:
A A
A AК AН
Производная от вектора A :
A AК AН
dA dAx dAy dAz
;
;
dt dt dt dt
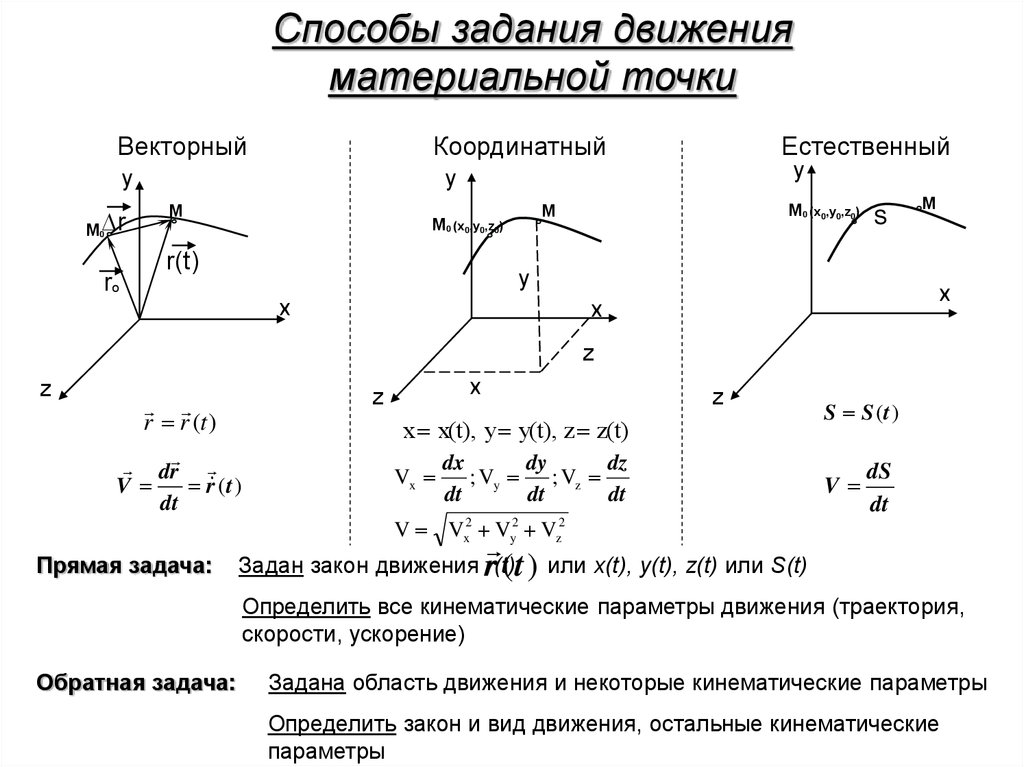
14.
Способы задания движенияматериальной точки
Векторный
Координатный
y
M ∆r
y
y
M
r(t)
M
M0 (x0,y0,z0)
M
M0 (x0,y0,z0)
0
ro
Естественный
y
x
x
x
z
z
z
x x(t), y y(t), z z(t)
dr
V
r (t )
dt
Прямая задача:
x
z
r r (t )
Vx
dx
dy
dz
; Vy ; Vz
dt
dt
dt
V Vx2 Vy2 Vz2
S S (t )
V
dS
dt
Задан закон движения r
r(t)
(t ) или x(t), y(t), z(t) или S(t)
Определить все кинематические параметры движения (траектория,
скорости, ускорение)
Обратная задача:
Задана область движения и некоторые кинематические параметры
Определить закон и вид движения, остальные кинематические
параметры
15. Основные понятия
sl r
• Траектория – линия, соединяющая
геометрические места точек, которые
занимала данная материальная точка в
процессе своего движения
• Пройденный путь – длина траектории
• Перемещение – вектор, начинающийся в
первой точке рассматриваемого движения и
заканчивающийся в последней
16. Скорость
• Скорость – быстрота измененияположения тела
• Средняя скорость – отношение
изменения положения тела к
промежутку времени, за которое это
изменение положения произошло
s
Vср Va V V
- средний модуль скорости
t
l
Δr
Vср Va V
- средний вектор скорости
t t
17. Мгновенная скорость
sМгновенная скорость
l r
s ds
V lim Vср lim
- модуль мгновенной скорости
t 0
t 0 t
dt
Δr dr
V lim Vср lim
- вектор мгновенной скорости
t 0
t 0 t
dt
t 0
s l r
V V
18. Путь и перемещение
S V (t )dtr V (t )dt
- пройденный путь
- перемещение
rx Vx (t )dt
ry Vy (t )dt
rz Vz (t )dt
19. Орт
• Орт – единичный вектор в выбранномнаправлении
a
ea
a a
ea
a a
ea 1 безразмерн ая величина !!!
20. Компоненты ускорения
V V eV V eeV e
V
dV d (V e ) dV
de
a
e V
dt
dt
dt
dt
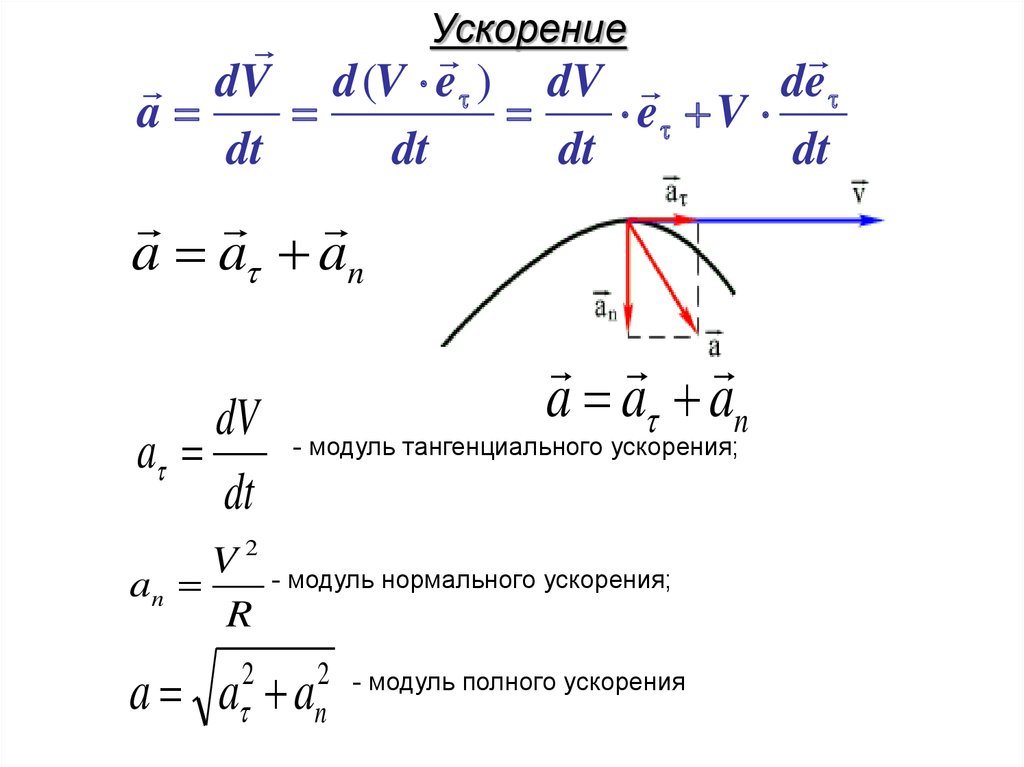
21.
УскорениеdV d (V e ) dV
de
a
e V
dt
dt
dt
dt
a a an
dV
a
dt
V2
an
R
a a an
- модуль тангенциального ускорения;
- модуль нормального ускорения;
a a a
2
2
n
- модуль полного ускорения