




 Информатика
ИнформатикаПохожие презентации:



")


")

هوش مصنوعي
1.
هوش مصنوعيفصل سوم
حل مسئله با جستجو
1
2.
هوش مصنوعيفهرست
Artificial Intelligence
عاملهای حل مسئله
اندازه گيری کارايي حل مسئله
جستجوی ناآگاهانه
اجتناب از حالتهای تکراری
جستجو با اطالعات ناقص
2
3.
عاملهای حل مسئله عاملهای حل مسئله يک نوع از عاملهای هدف گرا است.
عاملهای حل مسئله با يافتن دنباله ای از فعاليت هايي که منجر به حالت های
مطلوب مي شوند تصميم مي گيرند که چه کاری بايد انجام دهند.
الگوريتم های آگاهانه و ناآگاهانه
اگر تصميم گيری عامل در حل مسئله مبتني بر آگاهي و شواهد نزديکي
به جواب با شد ،ا ين رهيا فت حل م سئله را ج ستجوی آگاها نه مي گوي ند و
در غير اينصورت جستجوی ناآگاهانه مي گويند.
3
4.
چهار گام اساسي برای حل مسائل فرموله کردن هدف :وضعيتهای مطلوب نهايي کدامند؟
فرموله کردن مسئله :چه فعاليتها و وضعيتهايي برای رسيدن به هدف
موجود است؟
جستجو :انتخاب بهترين دنباله از فعاليتهايي که منجر به حاالتي با مقدار
شناخته شده مي شود .عاملي که با چ ند گزي نه فوری و م قداری نا شناخته
مواجه است ابتدا بايد دنباله های ممکن از فعاليتهايي را که منجر به حالتهايي
با مقدار شناخته شده مي شوندرا بررسي کند و سپس بهترين دنباله را انتخاب
کند.
4ا جرا :وق تي دنبا له فعال يت مط لوب تو سط ج ستجو پ يدا شد ،فعاليت های
پيشنهادی آن ميتواند اجرا شود.
5.
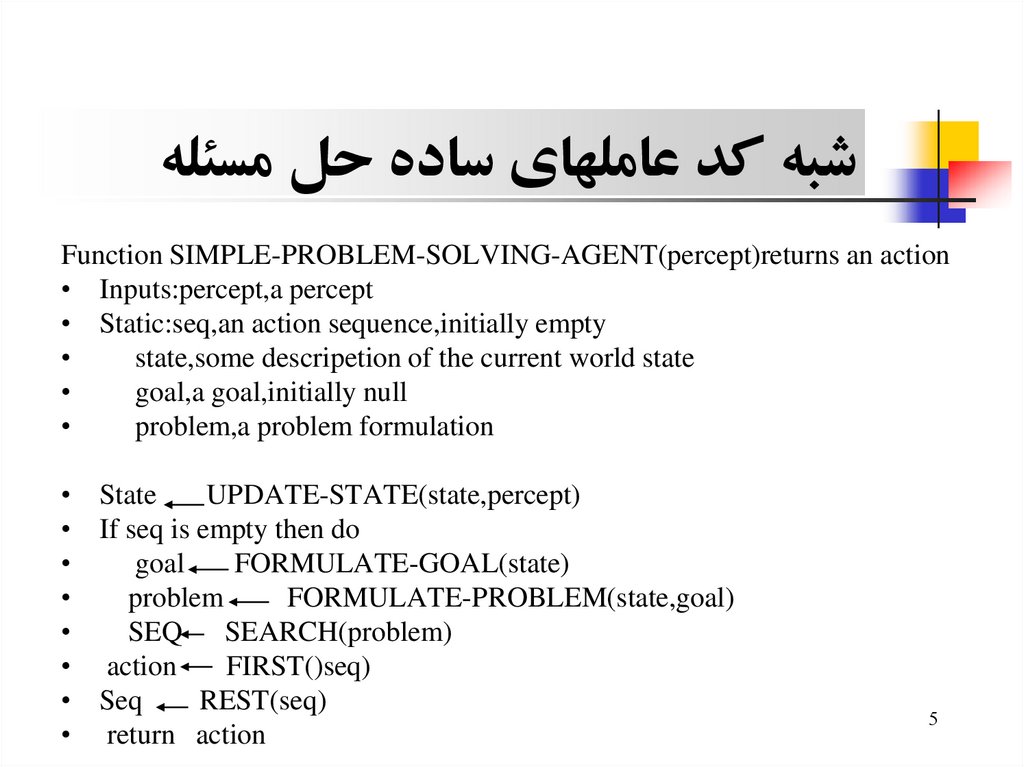
شبه کد عاملهای ساده حل مسئلهFunction SIMPLE-PROBLEM-SOLVING-AGENT(percept)returns an action
• Inputs:percept,a percept
• Static:seq,an action sequence,initially empty
state,some descripetion of the current world state
goal,a goal,initially null
problem,a problem formulation
• State
UPDATE-STATE(state,percept)
• If seq is empty then do
goal
FORMULATE-GOAL(state)
problem
FORMULATE-PROBLEM(state,goal)
SEQ SEARCH(problem)
• action
FIRST()seq)
• Seq
REST(seq)
• return action
5
6.
مفروضات شبه کد عاملهای ساده حل مسئله در طرا حي عا مل ارا ئه شده ،فرمو له کردن و حل م سئله
بدون توجه به تغييرات در محيط صورت مي گيرد پس فرض
بر اين است که محيط ايستا است.
فرض مي شود حالت اوليه مشخص است اگر محيط قابل
مشاهده باشد ،دانستن حالت اوليه ساده تر است.
فرض مي شود محيط گسسته است.
فرض مي شود محيط قطعي است.
6
7.
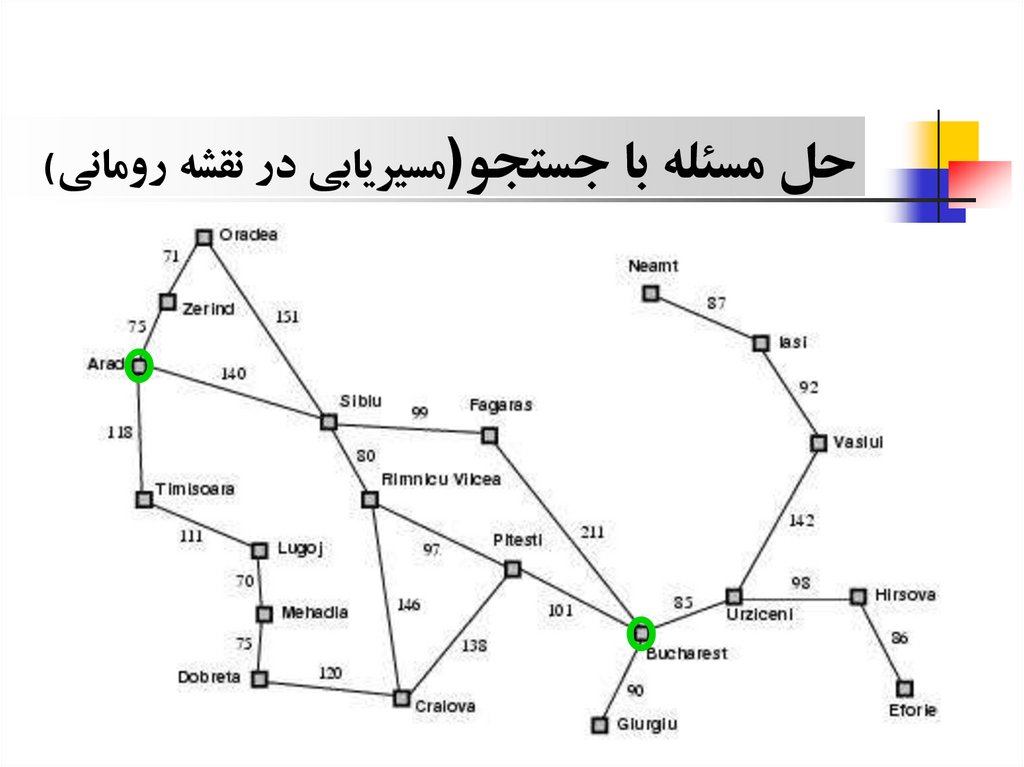
حل مسئله با جستجو(مسيريابي در نقشه7
روماني)
8.
حل مسئله با جستجو(مسيريابي در نقشهروماني)
صورت مسأله :رفتن از آراد به بخارست
فرموله کردن هدف :رسيدن به بخارست
فرموله کردن مسئله:
وضعيتها :شهرهای مختلف
فعاليتها :حرکت بين شهرها
جستجو :دنباله ای از شهرها مثل:آراد ،سيبيو ،فاگارس ،بخارست
8
اين جستجو با توجه به کم هزينه ترين مسير انتخاب ميشود
9.
مسئله و راه حل های خوش تعريف .1حالت اوليه :حالتی که عامل از آن شروع ميکند.
در مثال روماني :شهر آراد )in(Arad
.2تابع جانشين :توصيفی از فعاليتهای ممکن که برای عامل مهيا است.
متداولترین فرمول بندی از تابع جانشين استفاده می کند.
با توجه به حالت خاصی مثل ، xتابع ) successor(xمجموعه ای از <جانشين و فعاليت> را بصورت زوج
مرتب بر ميگرداند که هر فعاليت ،یک فعاليت معتبر در حالت xو هر جانشين ،حالتی است که با انجام
آن فعاليت از طریق xبه آن می رسيم.
9
در مثال روماني< GO(Sibiu) , in(Sibiu)> :
با توجه به حالت اوليه و تابع جانشين ،فضای حالت مسئله را می توان تعریف کرد
فضای حالت :مجموعه ای از حالتهاست که از حالت اوليه می توان به آنها رسيد
10.
مسئله و راه حل های خوش تعريف(ادامه) .3آزمون هدف :تعيين ميکند که آیا حالت خاصی ،حالت هدف است یا
خير
هدف صریح :در مثال رومانی ،رسيدن به بخارست
هدف انتزاعی :در مثال شطرنج ،رسيدن به حالت کيش و مات
.4تابع هزینه ی مسير :برای هر مسير یک هزینه عددی در نظر می گيرد.
مسير:دنباله ای از حالتها که دنباله ای از فعاليتها را به هم متصل ميکند.
در مثال رومانی Arad, Sibiu, Fagaras :یک مسير است
راه حل مسئله مسيری از حالت اوليه به حالت هدف است
10
راه حل بهينه کمترين هزينه مسير را دارد
11.
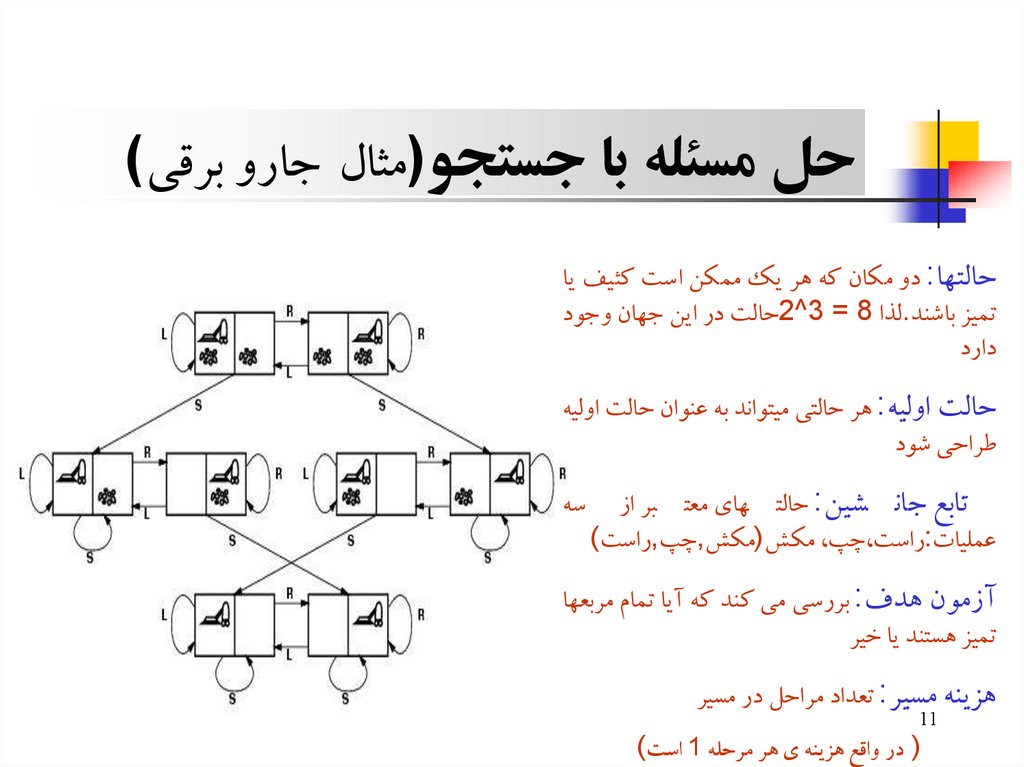
حل مسئله با جستجو(مثال جارو برقی)حالتها :دو مکان که هر یک ممکن است کثيف یا
تميز باشند.لذا 2^3 = 8حالت در این جهان وجود
دارد
حالت اوليه :هر حالتی ميتواند به عنوان حالت اوليه
طراحی شود
تابع جان شين :حالت های معت بر از
عمليات:راست،چپ ،مکش(مکش,چپ,راست)
سه
آزمون هدف :بررسی می کند که آیا تمام مربعها
تميز هستند یا خير
هزینه مسير :تعداد مراحل در مسير
11
( در واقع هزینه ی هر مرحله 1است)
12.
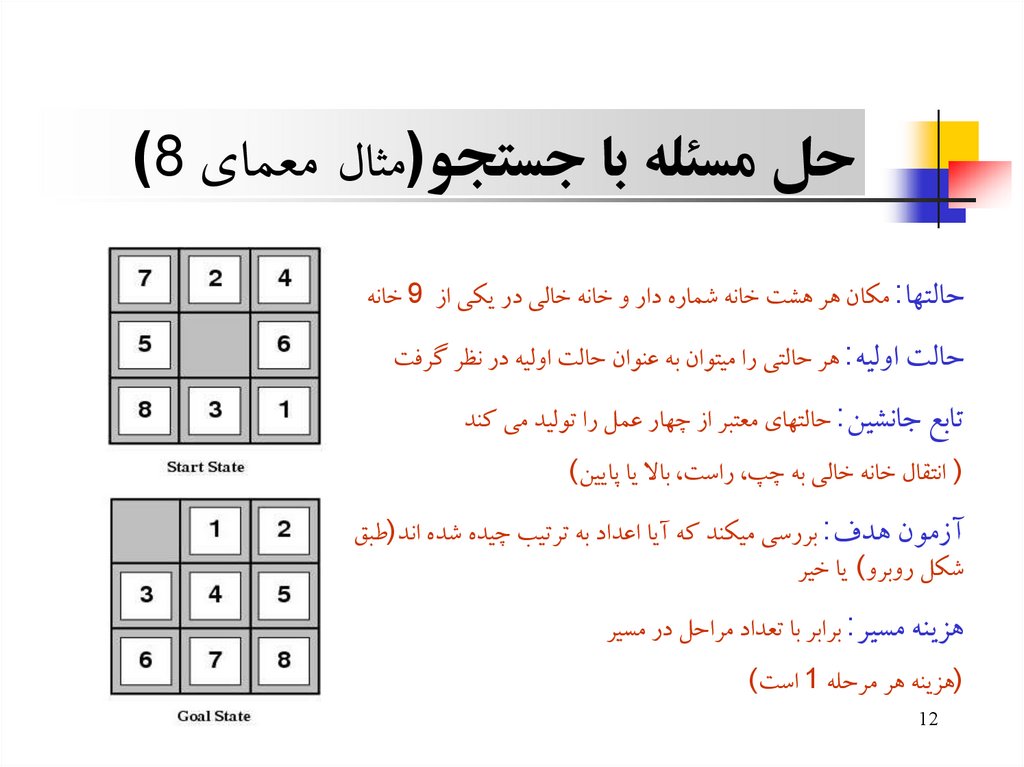
حل مسئله با جستجو(مثال معمای )8حالتها :مکان هر هشت خانه شماره دار و خانه خالی در یکی از 9خانه
حالت اوليه :هر حالتی را ميتوان به عنوان حالت اوليه در نظر گرفت
تابع جانشين :حالتهای معتبر از چهار عمل را توليد می کند
( انتقال خانه خالی به چپ ،راست ،باال یا پایين)
آزمون هدف :بررسی ميکند که آیا اعداد به ترتيب چيده شده اند(طبق
شکل روبرو) یا خير
هزینه مسير :برابر با تعداد مراحل در مسير
(هزینه هر مرحله 1است)
12
13.
حل مسئله با جستجو(مثال معمای -8ادامه) مع مای 8به خانوادهی معما های جاب جایی ب لوک تع لق دارد که برای آز مون ال گوریتم
های جستجوی جدید در AIبکار می رود.
این رده از مسائل را NPکامل می گویند.
معمای 8دارای! 9حالت قابل رسيدن است.
مع مای (15صفحه ی )4*4تقری با دارای 3/1تریل يون حا لت ا ست ا ما در چ ند مي لی
ثانيه حل می شوند.
معمای ( 24صفحه ی )5*5تقریبا 10^25حالت دارد و حل نمونه های آن با بهترین
الگوریتم ها و ماشين های فعلی دشوار است.
13
14.
حل مسئله با جستجو(مثال 8وزیر)فرمول بندی افزايشي
حالتها :هر ترتيبی از 0تا 8وزیر در صفحه ،یک حالت
است
حالت اوليه :هيچ وزیری در صفحه نيست
تابع جانشين :وزیری را به خانه خالی اضافه ميکند
آز مون هدف8 :وز یر در صفحه و جود دار ند و هيچ
کدام به یکدیگر گارد نميگيرند
در اين فرمول بندی بايد 3*10^14
دنباله ممکن بررسي ميشود
14
15.
حل مسئله با جستجو(مثال 8وزیر-ادامه)فرمول بندی حالت کامل
حالتها :چيدمان nوزیر ) ،(0≤ n≤ 8بطوریکه در هر ستون از
nستون سمت چپ ،یک وزیر قرار گيرد و هيچ دو وزیری بهم
گارد نگيرند
حالت اوليه :با 8وزیر در صفحه شروع ميشود
تابع جانشين? :
آز مون هدف8 :وز یر در صفحه و جود دار ند و هيچ کدام به
یکدیگر گارد نميگيرند
اين فرمول بندی فضای حالت را از
3*10^14به 2057کاهش ميدهد
15
16.
اندازه گيری کارآيي حل مسئله کامل بودن :آیا الگوریتم تضمين ميکند که در صورت وجود راه حل،
آن را بيابد؟( در صورتی که الگوریتم در یک LOOPبينهایت قرار
گيرد،کامل نيست)
بهينگی :آیا این راهبرد ،راه حل بهينه ای را ارائه ميکند.
پيچيدگی زمانی :چقدر طول ميکشد تا راه حل را پيدا کند؟
تعداد گره های توليد شده در اثنای جستجو
پيچيدگی فضا :برای جستجو چقدر حافظه نياز دارد؟
حداکثر تعداد گره های ذخيره شده در حافظه
16
17.
جستجوی ناآگاهانه(کورکورانه) ناآگاهی این است که الگوریتم هيچ اطالعاتی غير از تعریف مسئله در اختيار ندارد
این الگوریتمها فقط ميتواند جانشينهایی را توليد کنند و هدف را از غير هدف تشخيص دهند
راهبردهایی که تشخيص می دهند یک حالت غير هدف نسبت به گره غير هدف دیگر ،اميد بخش تر
است ،جست و جوی آگاهانه یا جست و جوی اکتشافی ناميده ميشود.
راهبردها
جست و جوی عرضی()BFS
جست و جوی هزینه یکنواخت
جست و جوی عميق کننده تکراری()IDFS
جست و جوی دو طرفه
جست و جوی عمقی()DFS
17
جست و جوی عمقی محدود
18.
جستجوی عرضيA
B
E
J
C
F
K
D
G
L
M
H
N
O
P
I
Q
18
19.
جستجوی عرضي(ادامه)کامل بودن :بله
بهينگی :بله (مشروط)
جستجوی عرضی ابتدا کم عمق ترین وضعيت هدف را پيدا می کند و در صورتی
بهينه است که هزینه مسير ،تابعی غير نزولی از عمق گره باشد (مثل وقتی که فعاليتها
هزینه یکسانی دارند)
پيچيدگی زمانی:
)
d 1
O(b
پيچيدگی فضا:
)
d 1
O(b
19
20.
زمان و فضای الزم برای جستجوی عرضیعمق
گره ها
زمان
حافظه
2
1100
11 seconds
1mb
4
111،100
11 seconds
106 mb
6
10^7
19 minutes
10gb
8
10^9
31 hours
1tb
10
10^11
129 days
101 tb
12
10^13
35 years
10pb
14
10^15
3،523 years
1eb
اعدادی که نشان داده شده اند با فاکتور B=10تعداد 000/10گره در هر ثانيه و هر گره
1000بايت فضا را اشغال مي کند .اين اعداد نشان مي دهند که هر هر چند مسئله زمان
20
مسئله ی مهمي است اما مسئله ی فضا مسئله ی جدی تری است.
21.
جستجوی با هزينه يکنواخت جستجو با هزینه ی یکنواخت ،استراتژی جستجوی عرضی را توسط بسط
کم هزینه ترین گره و نه کم عمق ترین گره بهبود می بخشد درواقع جستجوی
عرضی ،همان جستجوی یکسان با ) g(n)=DEPTH(nاست g(n)(.تابع
هزینه ی مسير است)
کامل بودن وقتی تضمين می شود که هزینه ی هر مرحله بزرگتر یا مساوی
یک مقدار ثابت و مثبت ξباشد .این شرط برای بهينگی نيز کافی است.
21
22.
جستجوی با هزينه يکنواخت(ادامه)1 این استراتژی بجای عمق از هزینه ی های مسير پيروی می کند لذا پيچيدگی
آن را نمی توان براحتی بر حسب bو dبدست آورد.
فرض کنيد هزینه ی راه حل بهينه * cو هزینه هر فعاليت حداقل ξاست
آنگاه پيچيدگی زمان و فضای الگوریتم در بدترین حالت برابر با
است.
وقتی هزینه تمام مراحل یکسان باشد ،
بود.
22
برابر با b ^dخواهد
23.
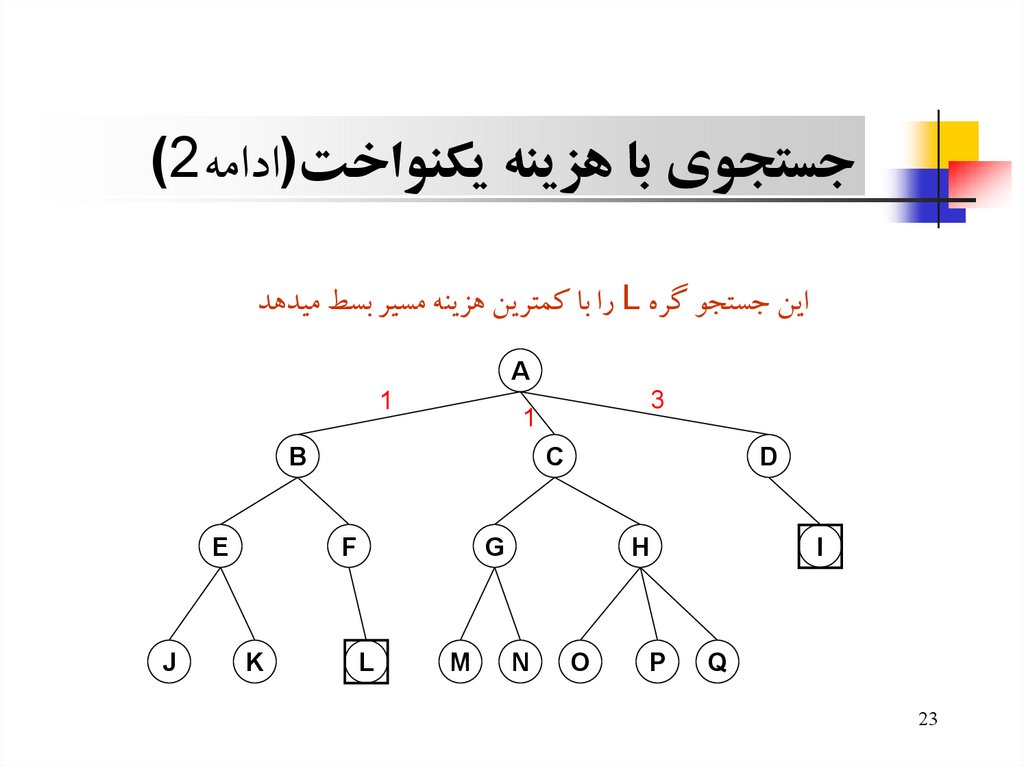
جستجوی با هزينه يکنواخت(ادامه)2این جستجو گره Lرا با کمترین هزینه مسير بسط ميدهد
A
3
1
D
C
I
B
H
Q
23
1
P
G
O
N
F
M
L
E
K
J
24.
جستجوی عمقي جستجوی عمقی هميشه عميق ترین گره را در حاشيه ی فعلی
درخت جستجو بسط می دهد.
این بسط دادن تا جایی ادامه می یابد که گره ها فاقد جانشين هستند
و سپس جستجو به عميق ترین گره ی بعدی که هنوز بسط داده نشده
باز می گردد.
برای جستجوی عمقی معموال از توابع بازگشتی استفاده می شود.
24
25.
)1جستجوی عمقي(ادامهA
2
3
4
E
B
C
F
6
D
G
H
I
7
J
K
L
M
N
O
P
Q
5
25
26.
جستجوی عمقي(ادامه)2کامل بودن :خير
اگر زیر درخت چپ عمق نامحدود داشت و فاقد هر گونه راه حل باشد،
جستجو هرگز خاتمه نمی یابد.
بهينگی :خير
m
پيچيدگی زمانی:
) O(b
پيچيدگی فضا:
)O(bm
26
mنشان دهنده ی حداکثر عمق است.
27.
جستجوی عمقي محدوداین استراتژی شبيه استراتژی جستجوی عمقی است با این
تفاوت که فرض می شود گره های سطح Lفاقد جانشين هستند
یعنی درخت تا عمق Lبسط داده می شود و از آنجا پایين تر نمی
رود.
مسئله درختهای نامحدود ميتواند به وسيله جست و جوی
عمقی با عمق محدود Lبهبود یابد
27
28.
جستجوی عمقي محدود(ادامه)1A
D
C
I
H
Q
28
B
P
G
O
N
F
M
L
E
K
J
29.
جستجوی عمقي محدود(ادامه)2کامل بودن :خير
اگر L<dباشد و سطحی ترین هدف در خارج از عمق
محدود شده قرار داشته باشد ،این راهبرد کامل نخواهد بود.
بهينگی :خير
این راهبرد بهينه نخواهد بود.
L
پيچيدگی زمانیO(b ) :
پيچيدگی فضا:
29
)O(bL
30.
جستجوی عميق کننده تکراری این استراتژی شبيه به جستجوی عمقی محدود عمل می کند با این تفاوت
که عمق محدود شده Lبتدریج اضافه شده و جستجو از سر گرفته می شود.
روند جستجو تا رسيدن به اولين پاسخ ادامه پيدا می کند.
جستجوی عميق کننده ی تکراری مزایای جستجوی عمقی و جستجوی
سطحی را در بردارد.
بطور کلی وقتی فضای جستجو بزرگ باشد و عمق راه حل مشخص نباشد
جستجوی عميق کننده ی تکراری روش ناآگاهانه مناسبی است.
30
31.
جستجوی عميق کننده تکراری(ادامه)1A
D
C
I
H
Q
31
B
P
G
O
N
F
M
L
E
K
J
32.
جستجوی عميق کننده تکراری(ادامه)2A
D
C
I
H
Q
32
B
P
G
O
N
F
M
L
E
K
J
33.
جستجوی عميق کننده تکراری(ادامه)3A
D
C
I
S
33
B
H
R
Q
P
G
O
N
F
M
L
E
K
J
34.
جستجوی عميق کننده تکراری(ادامه)4کامل بودن :بله
در صورتی که فاکتور انشعاب محدود باشد
بهينگی :بله
وقتی که هزینه مسير ،تابعی غير نزولی از عمق گره
باشد
d
پيچيدگی زمانیO(b ) :
پيچيدگی فضا:
34
)O(bd
35.
جستجوی دو طرفهانجام دو جست و جوی همزمان ،یکی از حالت اوليه به هدف و دیگری از
هدف به حالت اوليه تا زمانی که دو جست و جو به هم برسند
35
36.
جستجوی دو طرفه(ادامه)1 جستجو از سمت هدف به چه معناست؟
تعریف) -ما قبل های گره ، nگره هایی هستند که ، nما بعد آن ها باشد.
جستجو به سمت عقب به این معناست که توليد ما قبل ها از گره هدف آغاز شود. اگر تمام عملگرها قابل وارونه شدن باشند محاسبه ی ماقبل ها به سادگی امکان پذیر است
اما این کار در برخی مسائل بسيار مشکل است.
مسئله ی دیگر در جستجوی دوطرفه این است که هدف باید مشخص باشد.
36
37.
جستجوی دو طرفه(ادامه)2کامل بودن :بله
اگر هر دو جستجو ،عرضی باشند
بهينگی :بله
اگر هر دو جستجو ،عرضی باشند و هزینه تمام مراحل یکسان باشد
d/2
پيچيدگی زمانیO(b ) :
d/2
پيچيدگی فضاO(b ) :
37
38.
ارزيابي راهبردهای جستجوBFS
38
DFS
DLS
IDFS
BID
39.
اجتناب از حالتهای تکراری وجود حالتهای تکراری در يک مسئله قابل حل ،مي تواند آنرا
به مسئله غير قابل حل تبديل کند.
39
40.
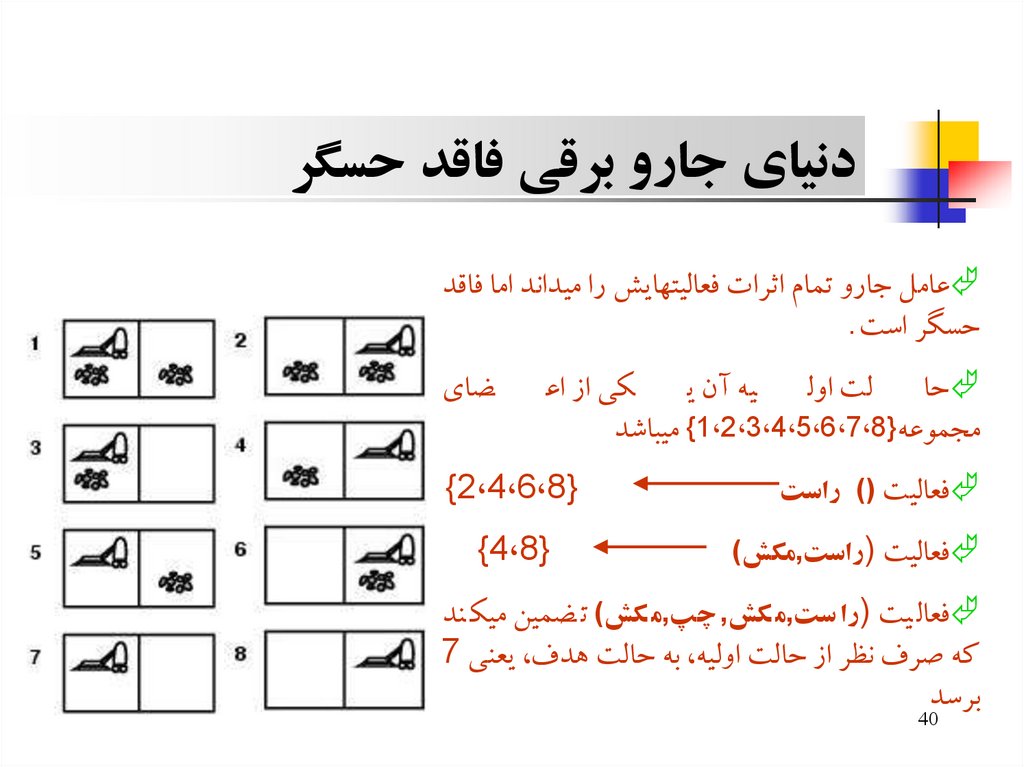
دنيای جارو برقي فاقد حسگر عامل جارو تمام اثرات فعاليتهایش را ميداند اما فاقد
حسگر است.
کی از اع
يه آن ی
حا لت اول
مجموعه{ }1،2،3،4،5،6،7،8ميباشد
فعاليت (( راست
فعاليت (راست,مکش)
ضای
{}2،4،6،8
{}4،8
فعال يت (را ست,م کش ,چپ,م کش) ت ضمين ميک ند
که صرف نظر از حالت اوليه ،به حالت هدف ،یعنی 7
برسد
40
41.
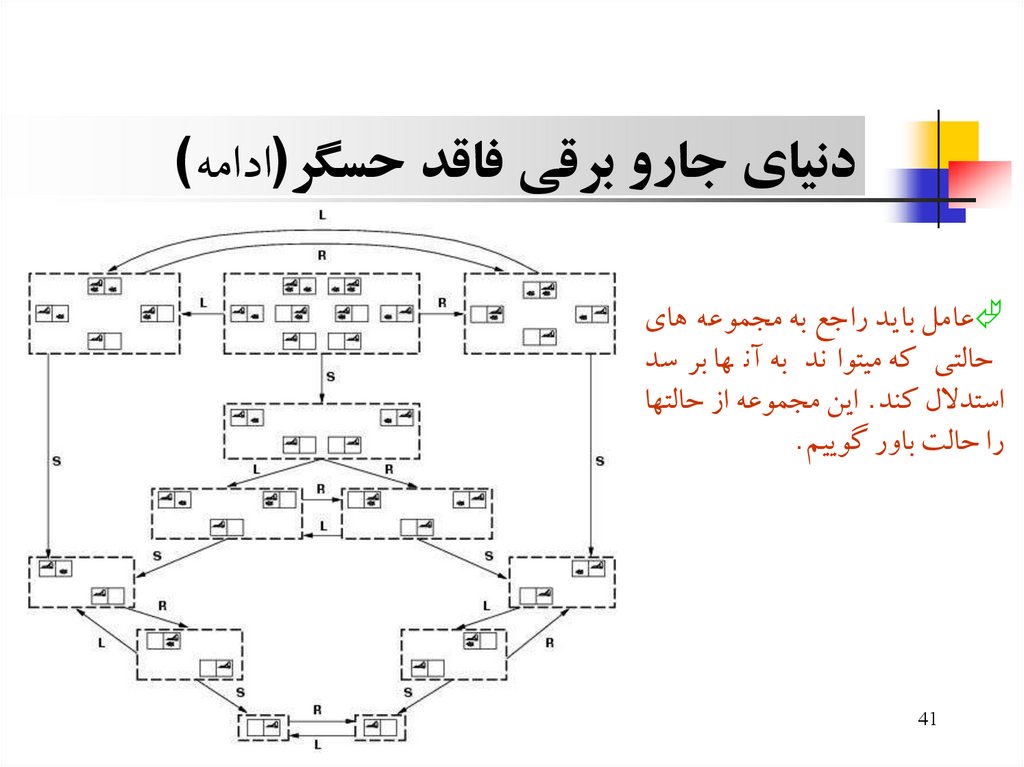
دنيای جارو برقي فاقد حسگر(ادامه) عامل باید راجع به مجموعه های
حالتی که ميتوا ند به آن ها بر سد
استدالل کند .این مجموعه از حالتها
را حالت باور گویيم.
41