







 Электроника
ЭлектроникаПохожие презентации:


")







Регулирование скорости электроприводов. Лекция 4
1.
Регулированиескорости
электроприводов
2.
Регулирование координат электроприводов1. Основные показатели регулирования угловой
скорости электропривода
2. Методы и средства регулирования двигателей
постоянного тока
3. Методы и средства регулирования асинхронных
двигателей
4. Частотно-регулируемый асинхронный
электропривод
5. Регулирование скорости асинхронных
двигателей в специальных (каскадных) схемах
3.
4.1 Основные показатели регулирования угловойскорости электропривода
Координатами
в
электроприводе
являются
скорость, момент, угол поворота, положение
рабочего органа в пространстве. Основная
координата – скорость.
В настоящее время все большее применение
находит электрическое регулирование скорости,
которое имеет ряд преимуществ в отношении
технических и экономических показателей.
4.
Основными показателями, характеризующимиразличные способы регулирования скорости
электроприводов, являются:
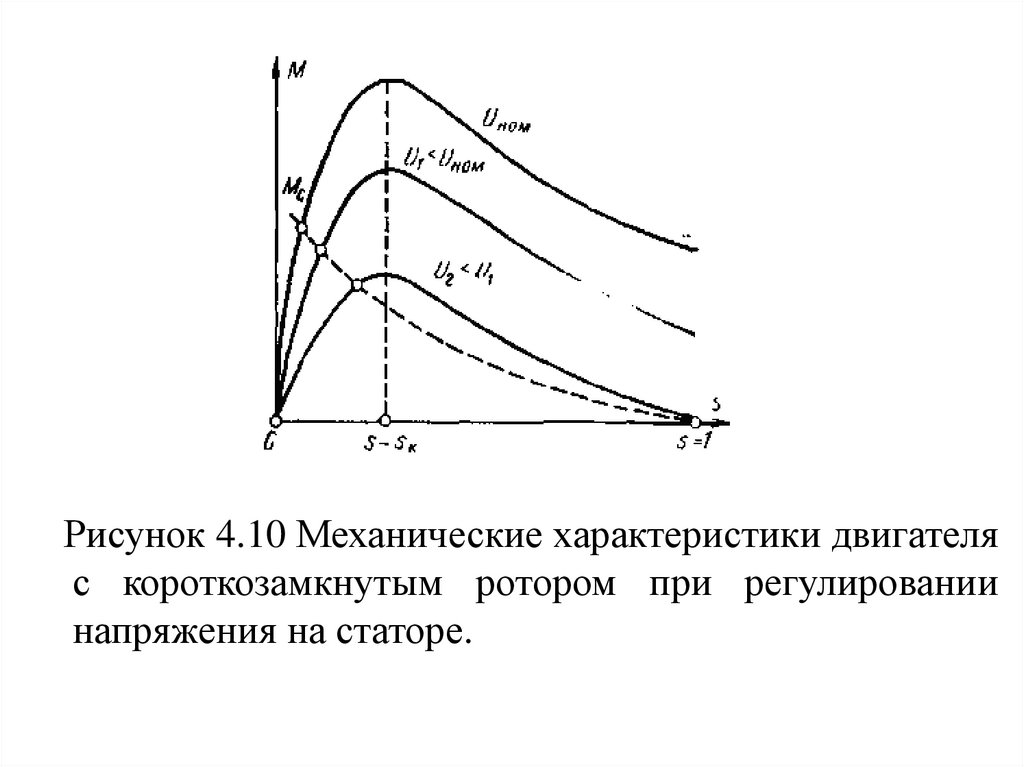
1) диапазон регулирования;
2) плавность;
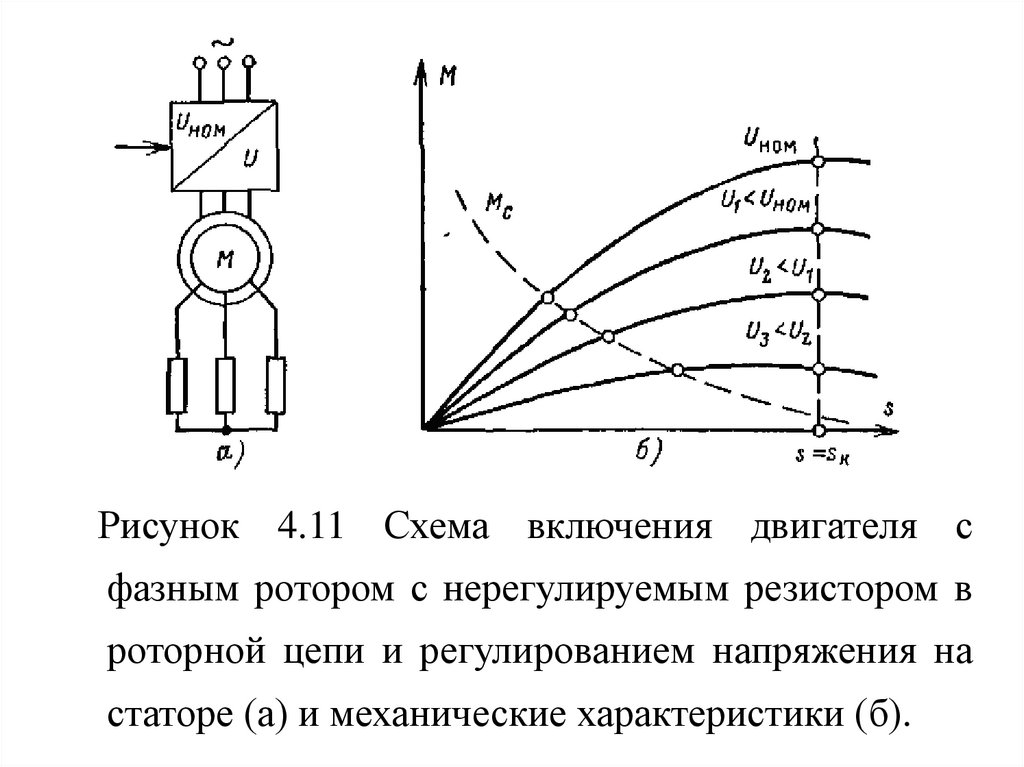
3) экономичность;
4) стабильность скорости;
5) направление регулирования скорости
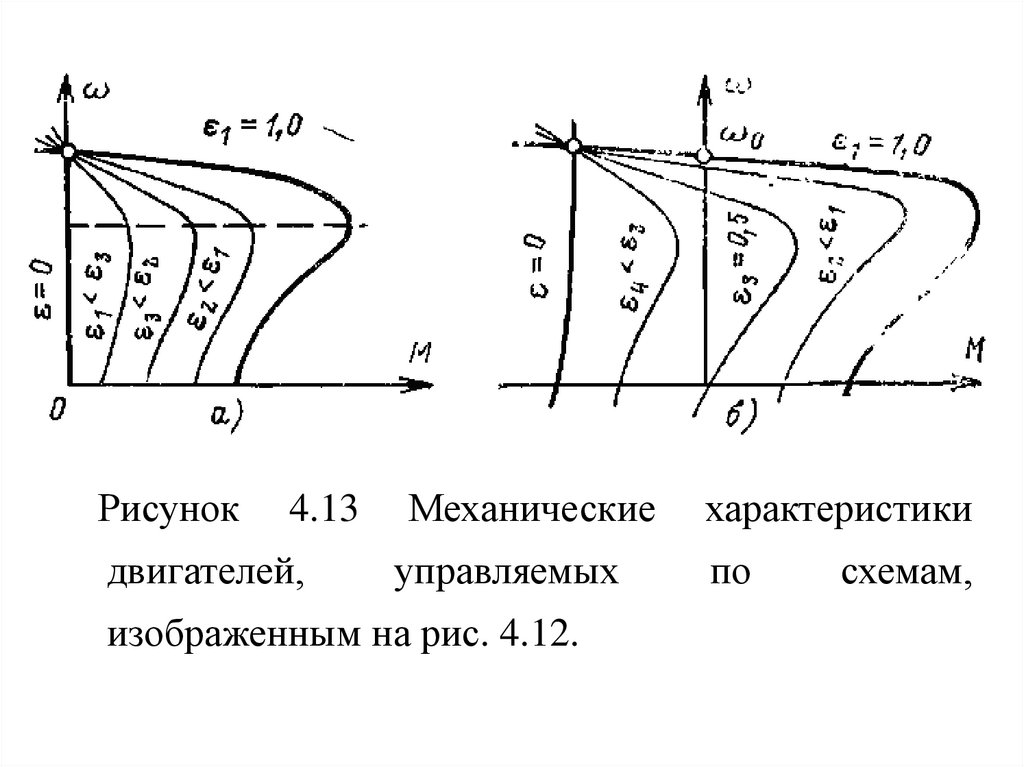
(уменьшение или увеличение ее относительно
основной скорости);
6) допустимая нагрузка при различных скоростях.
5.
1. Диапазон регулирования угловой скоростиопределяется
отношением
возможных
установившихся скоростей: максимальной ωmах к
минимальной ωmin.
D= ωmах: ωmin
при заданной точности регулирования (с заданным
статическим падением скорости электропривода)
для установленных пределов изменения момента
нагрузки и других возмущений.
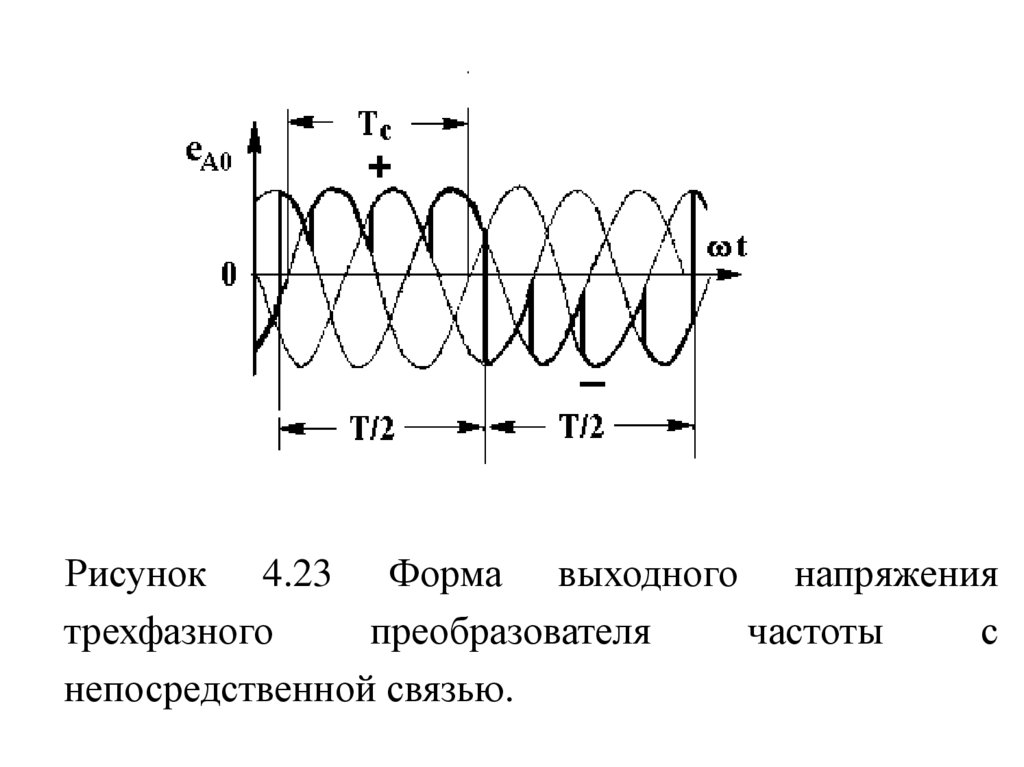
6.
2.Плавность регулирования
характеризует скачок скорости при переходе от
данной скорости к ближайшей возможной.
Плавность тем выше, чем меньше этот скачок. Число
скоростей, получаемых в данном диапазоне,
определяется плавностью регулирования. Ее можно
оценить коэффициентом плавности регулирования,
который находится как отношение двух соседних
значений угловых скоростей при регулировании
φПЛ=ωi/ ωi-1,
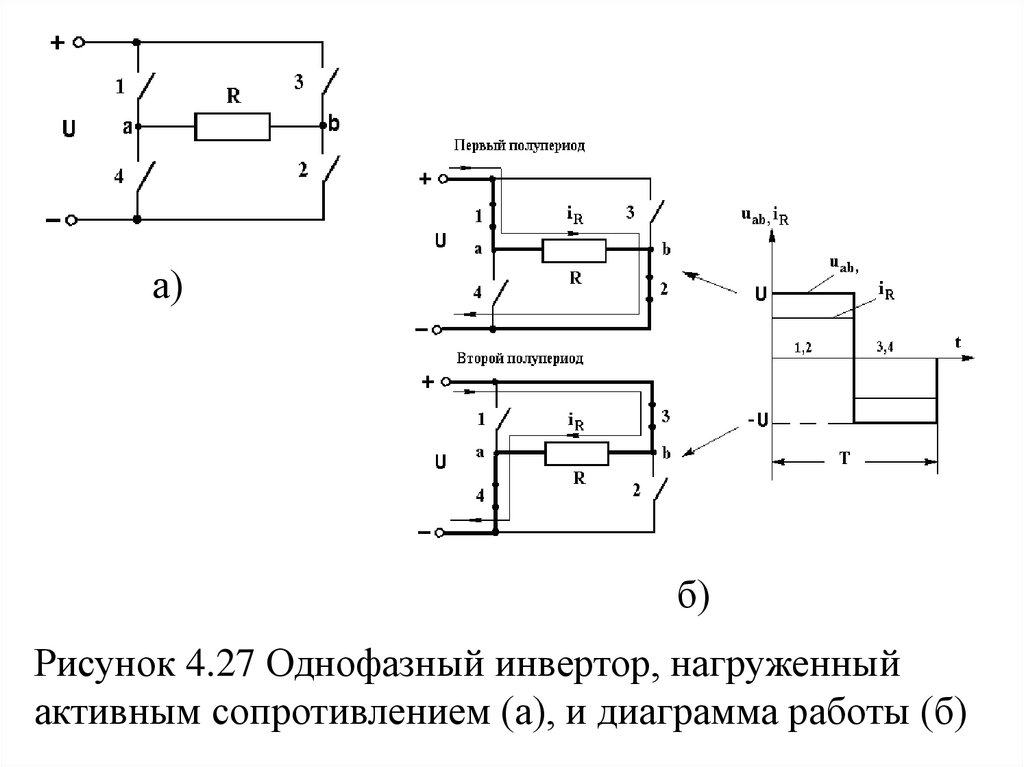
где ωi и ωi-1 - угловые скорости соответственно на i-й
и (i-1)-й ступенях регулирования.
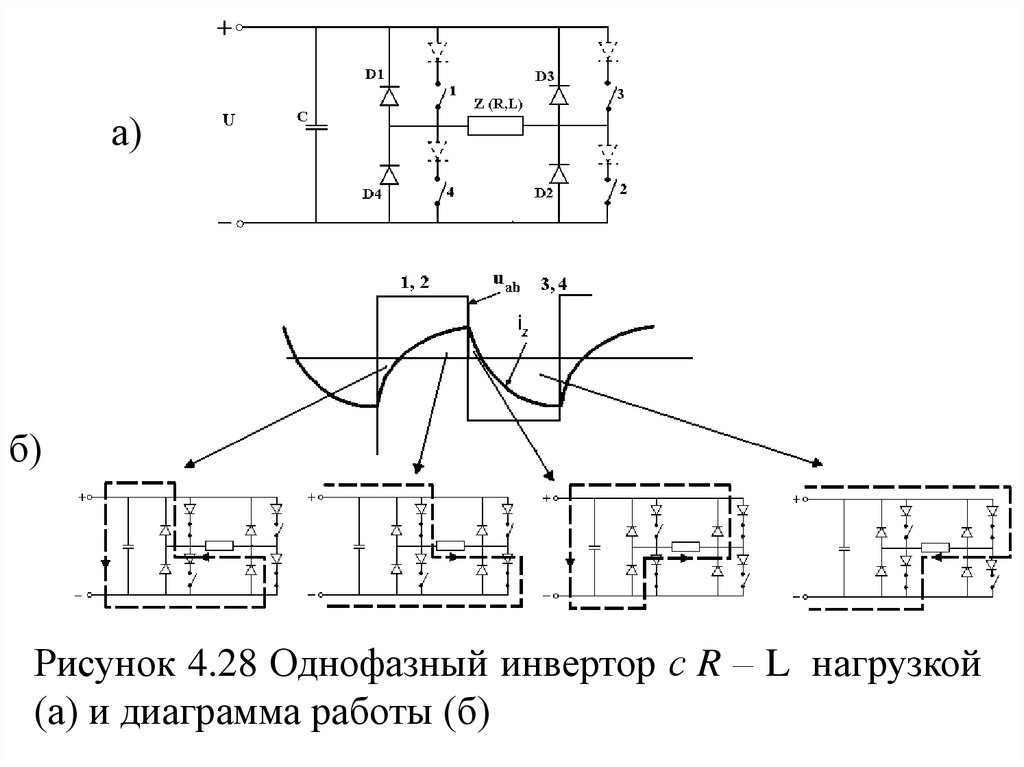
7.
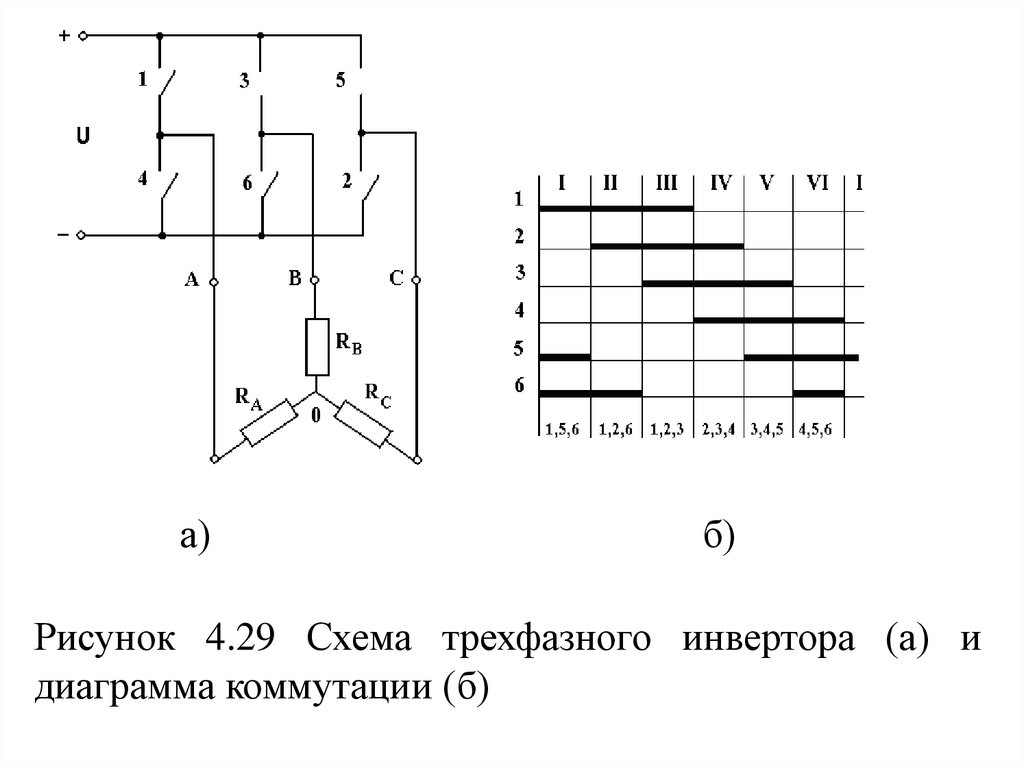
3. Экономичность регулирования характеризуетсязатратами
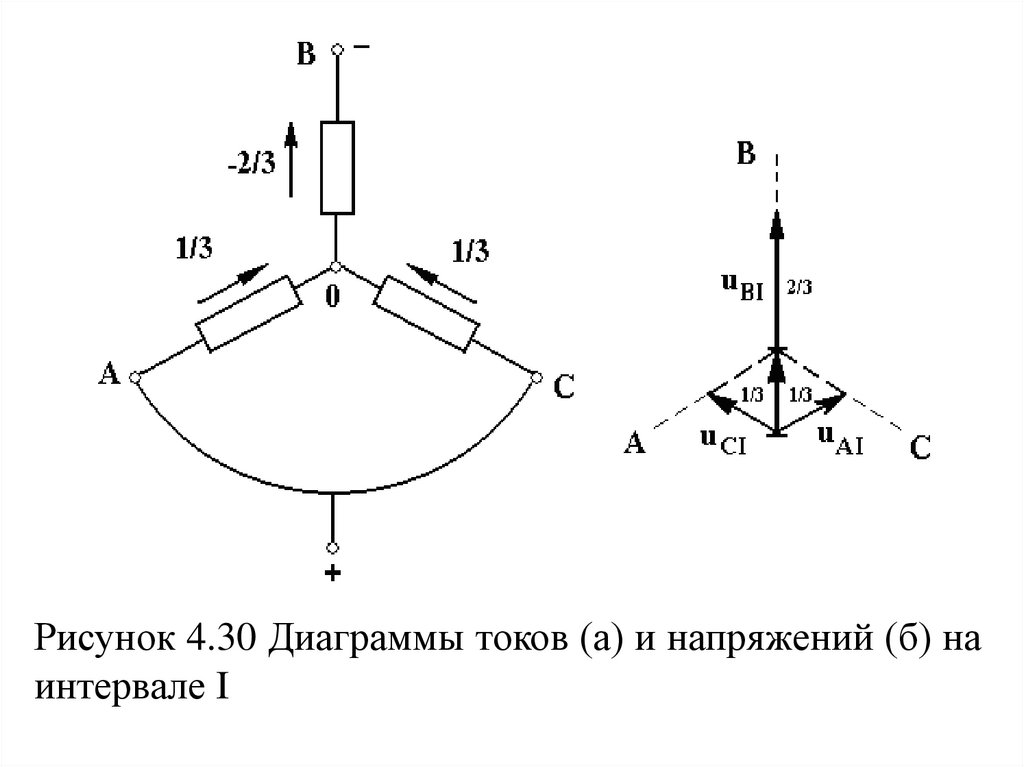
на
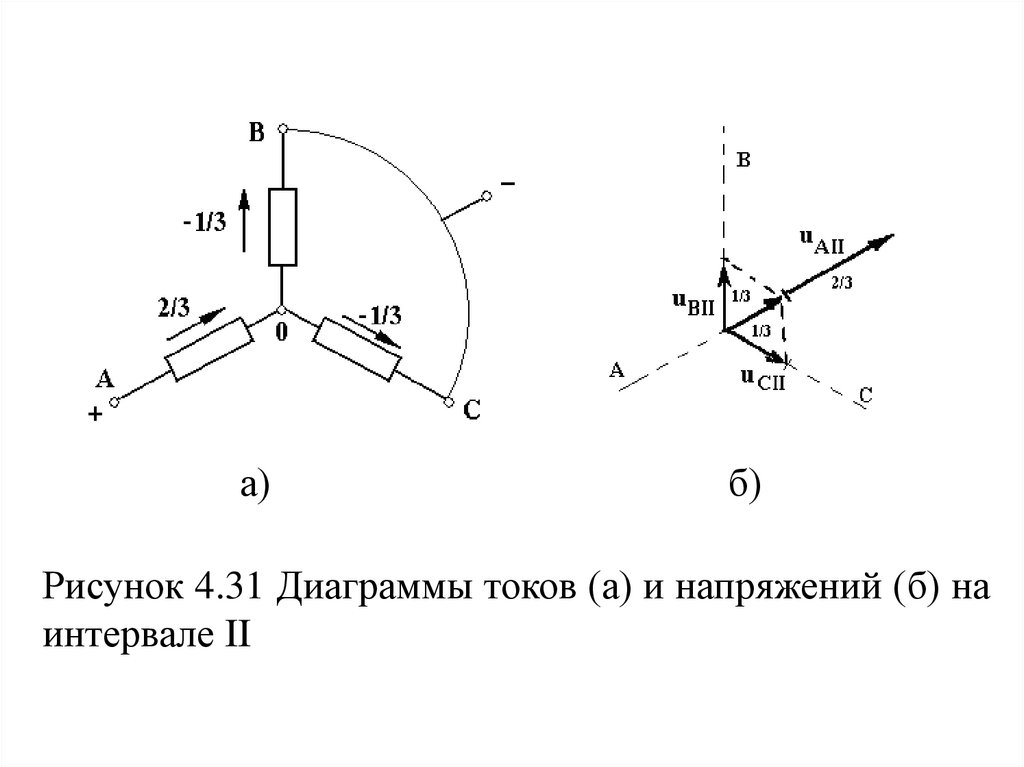
сооружение
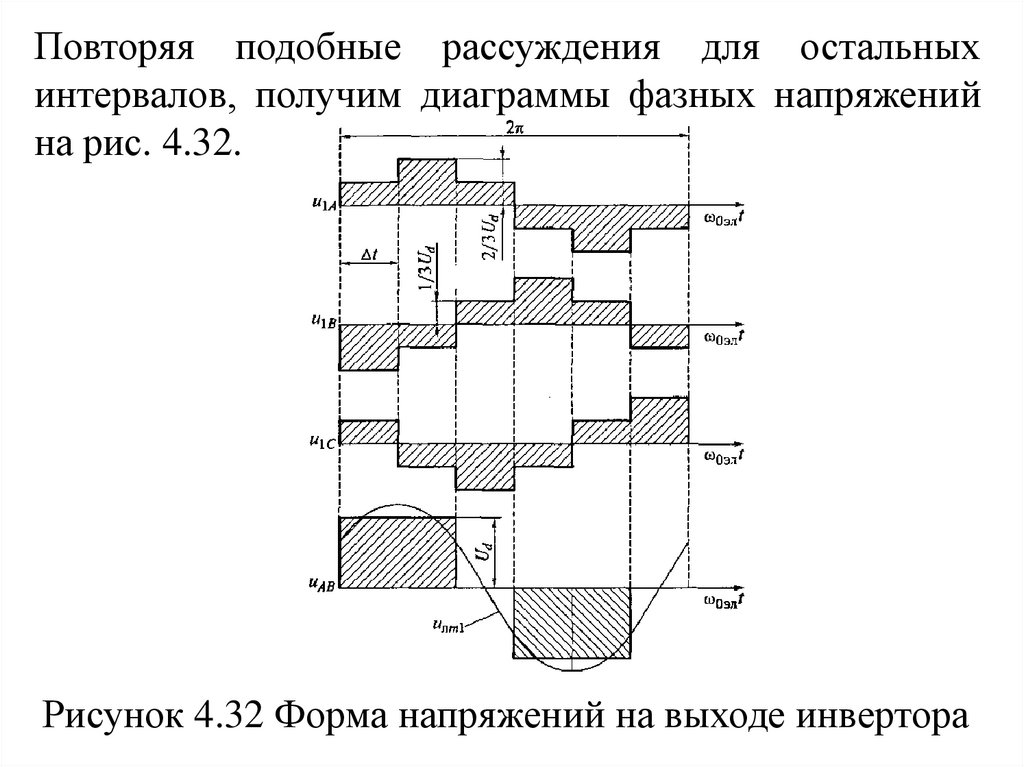
и
эксплуатацию
электропривода.
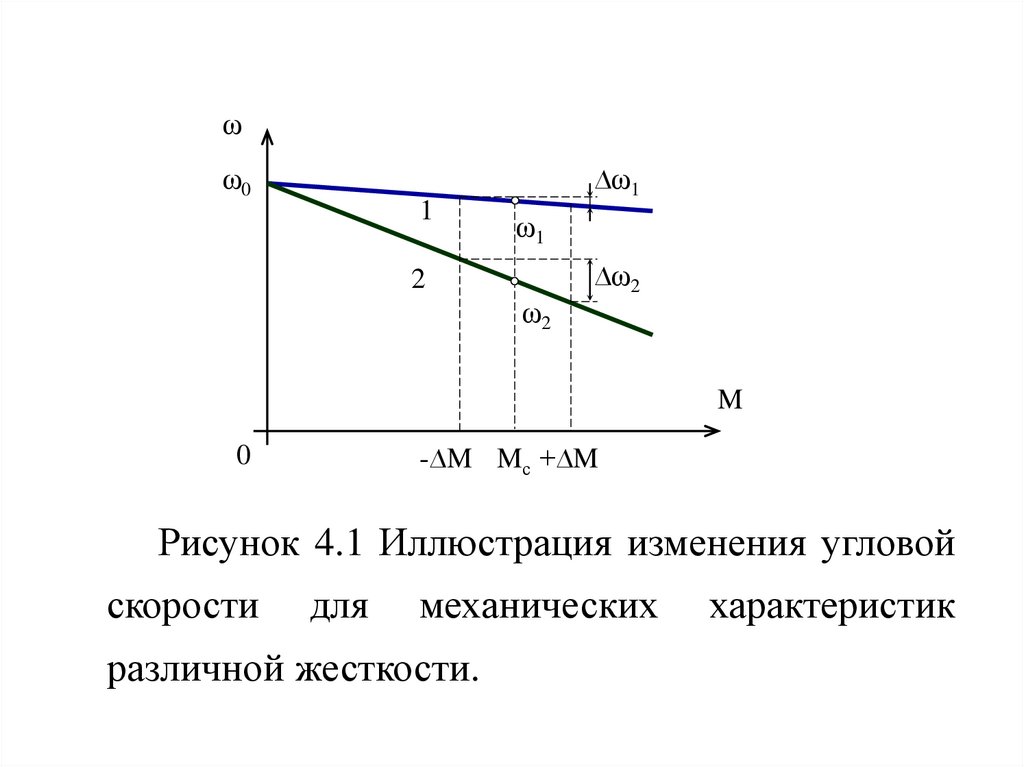
4.
Стабильность
угловой
скорости
характеризуется изменением угловой скорости при
заданном отклонении момента нагрузки и зависит от
жесткости механической характеристики; она тем
выше, чем больше жесткость характеристики.
8.
ωω0
1
∆ω1
ω1
∆ω2
2
ω2
M
-∆M Mс +∆M
0
Рисунок 4.1 Иллюстрация изменения угловой
скорости
для
механических
различной жесткости.
характеристик
9.
5. Направление регулирования скорости, т. е.уменьшение или увеличение ее по отношению к
основной
скорости,
зависит
от
способов
регулирования.
6. Допустимая нагрузка двигателя, т. е.
наибольшее значение момента, который двигатель
способен развивать длительно при работе на
регулировочных характеристиках, определяется
нагревом двигателя и для разных способов
регулирования будет различной.
Изменение нагрузочного момента в зависимости от
скорости
у
различных
производственных
механизмов различно.
10.
Допустимая нагрузка двигателя ограничиваетсястепенью его нагрева. Степень нагрева в свою
очередь зависит от потерь энергии в двигателе, а
последние определяются главным образом током,
потребляемым двигателем.
11.
4.2 Методы и средства регулирования ДПТУравнение механической характеристики для ДПТ
независимого возбуждения.
U я MRя
2 2
kФ k Ф
Скорость можно менять, изменяя:
1) U я
2) Ф
3) (Rя+ Rдоб) – включить Rдоб.
12.
1. Изменение напряжения U я :а)
диапазон
D=8…10
в
разомкнутых
системах
регулирования, в замкнутых – 1000.
б) вниз от естественной
в) плавность зависит от регулирования
г)
стабильность
характеристик
естественной характеристике
д) высокая экономичность
е) Мдоп=const.
соответствует
13.
Рисунок 4.3Механические характеристики
двигателя
постоянного
тока
независимого
возбуждения при различных напряжениях.
14.
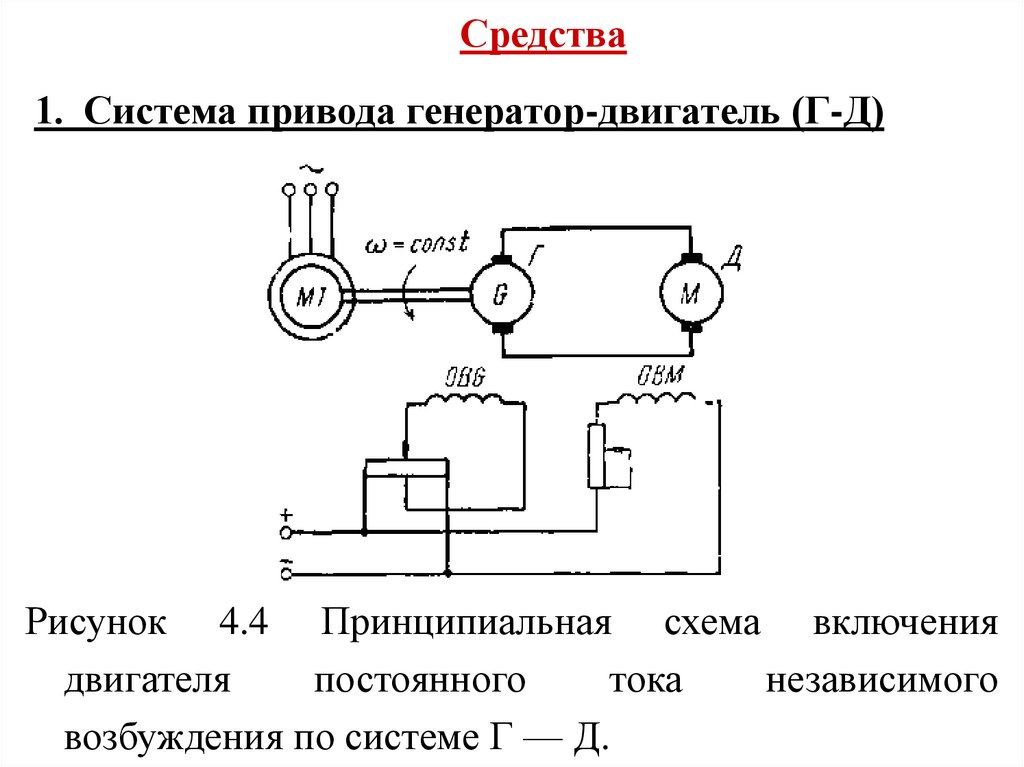
Средства1. Система привода генератор-двигатель (Г-Д)
Рисунок 4.4 Принципиальная схема включения
двигателя
постоянного
тока
независимого
возбуждения по системе Г — Д.
15.
К недостаткам системы Г—Д относятся:а) необходимость в двукратном преобразовании
энергии (из электрической энергии переменного
тока в механическую и из механической вновь в
электрическую постоянного тока регулируемого
напряжения), что приводит к значительному
снижению КПД;
б) наличие двух машин в преобразовательном
агрегате, установленная мощность каждой, если
пренебречь
потерями
в
машинах,
равна
установленной мощности регулируемого двигателя;
в) значительные габариты и масса установки,
необходимость
в
фундаменте
для
преобразовательного агрегата;
г) высокие капитальные и эксплуатационные расходы.
16.
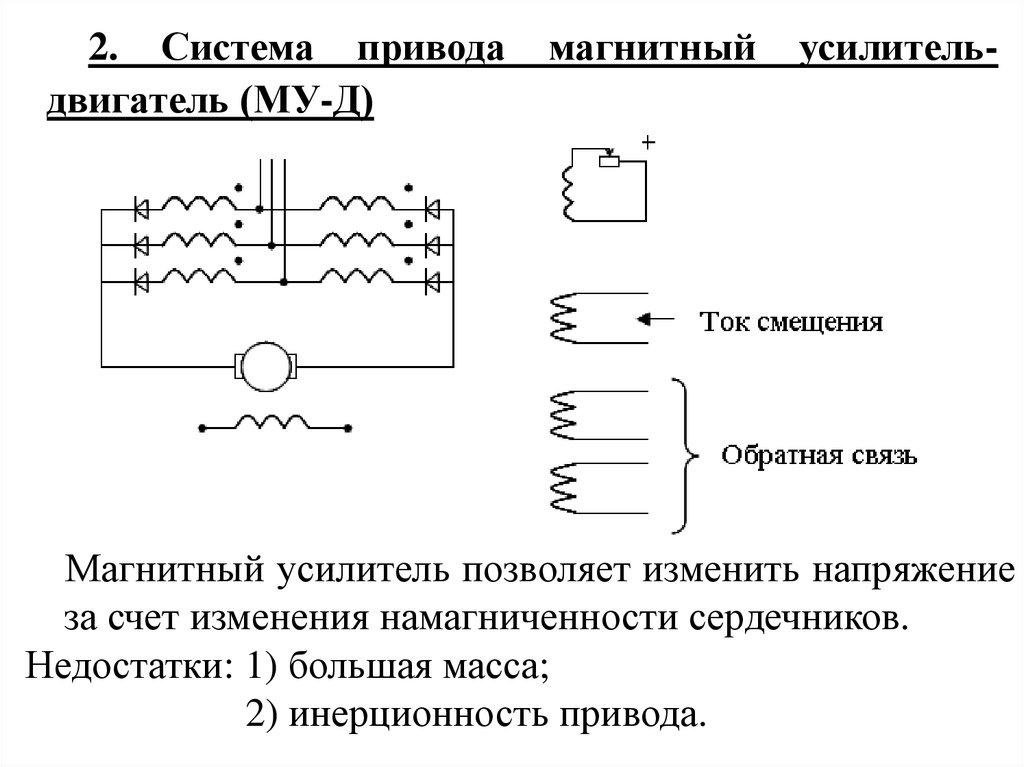
2. Система приводадвигатель (МУ-Д)
магнитный
усилитель-
Магнитный усилитель позволяет изменить напряжение
за счет изменения намагниченности сердечников.
Недостатки: 1) большая масса;
2) инерционность привода.
17.
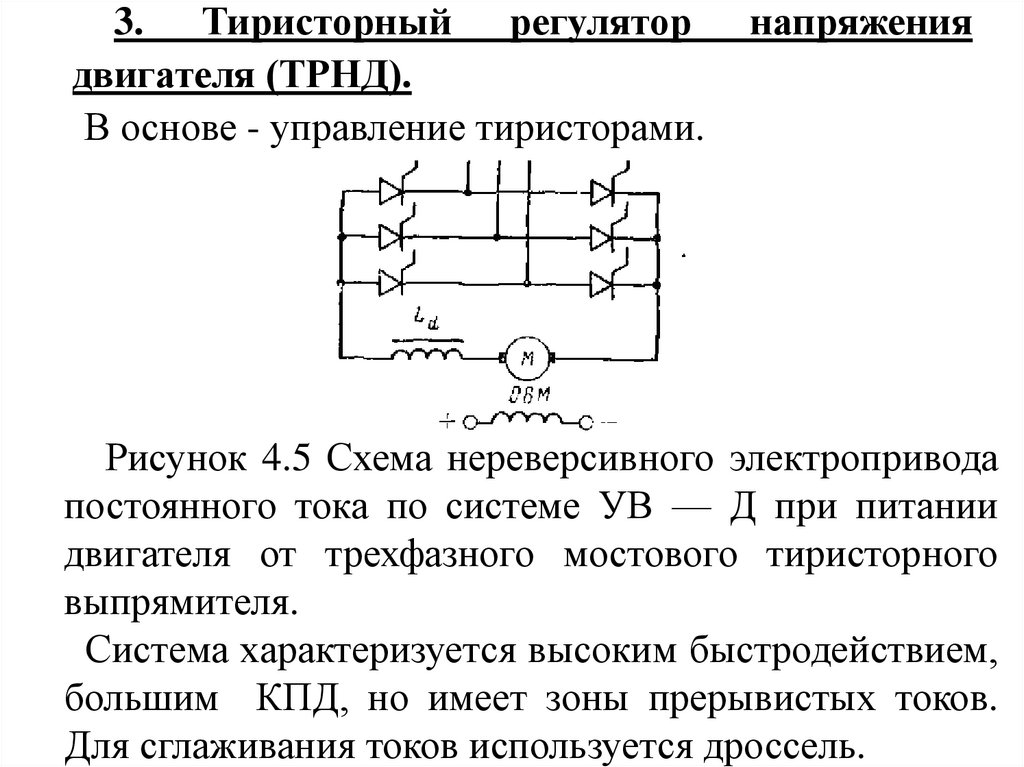
3. Тиристорный регулятордвигателя (ТРНД).
В основе - управление тиристорами.
напряжения
Рисунок 4.5 Схема нереверсивного электропривода
постоянного тока по системе УВ — Д при питании
двигателя от трехфазного мостового тиристорного
выпрямителя.
Система характеризуется высоким быстродействием,
большим КПД, но имеет зоны прерывистых токов.
Для сглаживания токов используется дроссель.
18.
2. Изменение потока Ф:Поток можно уменьшить → скорость возрастет.
Показатели:
а) Диапазон регулирования обычно до 2, в
специальных - до 8.
б) Регулирование вверх от естественной
характеристики
в) Плавность определяется регулятором, в
современных двигателях – плавно.
г) Стабильность характеристик снижается
д) Экономично
∆Р=IВ2R
1
I
20 Я
6) Регулирование при постоянной мощности.
19.
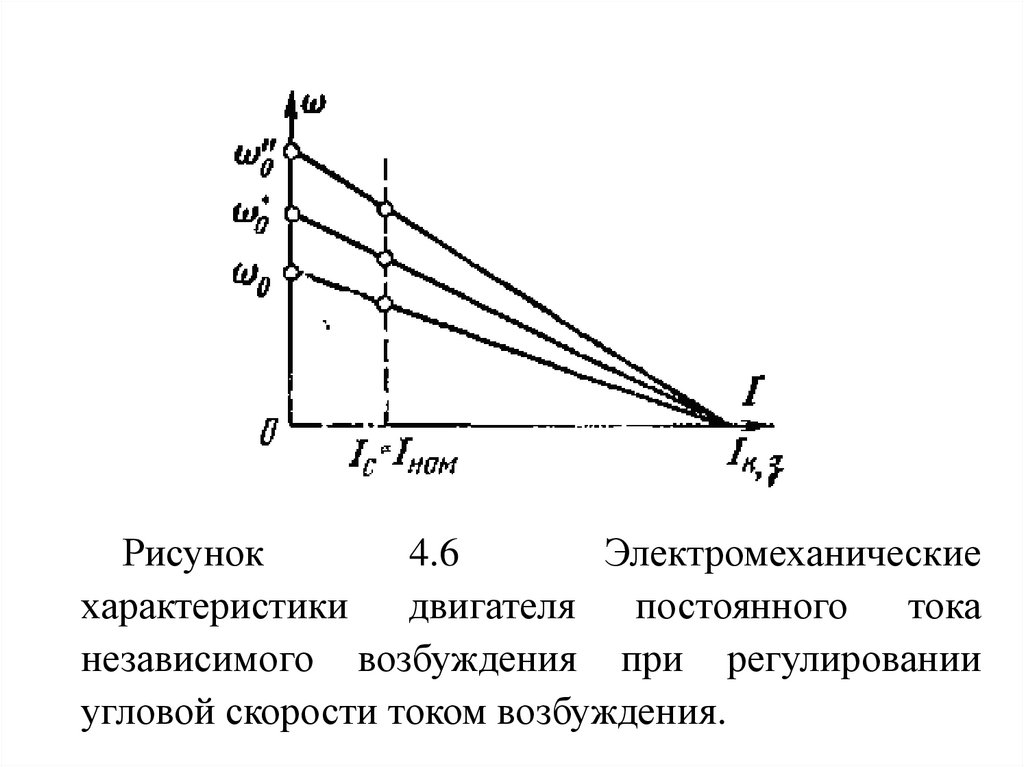
Рисунок4.6
Электромеханические
характеристики
двигателя постоянного тока
независимого возбуждения при регулировании
угловой скорости током возбуждения.
20.
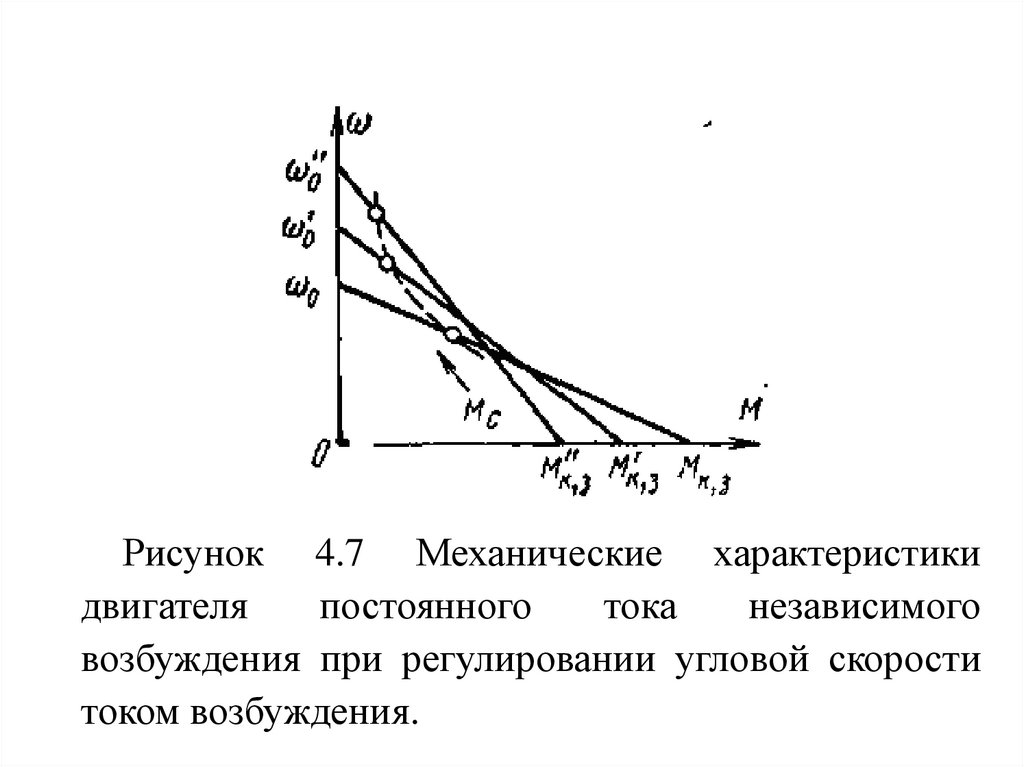
Рисунок 4.7 Механические характеристикидвигателя
постоянного
тока
независимого
возбуждения при регулировании угловой скорости
током возбуждения.
21.
Средства1) Реостатное возбуждение
2) Обычно применяется однофазный тиристорный
регулятор
22.
3. Включение Rдоб:1) Диапазон до 2,5
2) Регулирование вниз
3) Плавность низкая, обычно ступенчатая
4) Стабильность характеристик снижается
5) Неэкономично
6) Момент = const ∆P=Iя2Rдоб
Для такого регулирования используют специальные
добавочные реостаты.
Рассмотренные методы пригодны для двигателей
последовательного и смешанного возбуждения.
23.
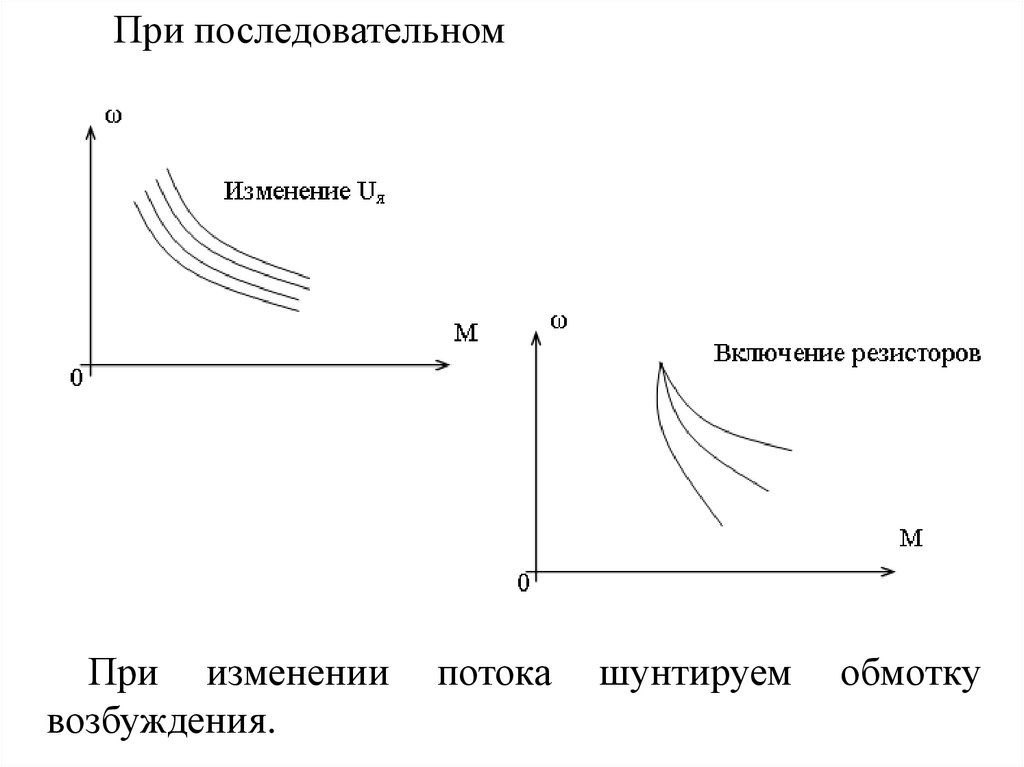
При последовательномПри изменении
возбуждения.
потока
шунтируем
обмотку
24.
Вывод:ДПТ имеют хорошие регулировочные свойства.
Наилучший способ регулирования напряжения U,
реостатами неэкономично. После регулирования
напряжения U идет регулирование потока Ф.
Двухзонное регулирование – регулирование вверх и
вниз от естественной характеристики.
25.
4.3 Методы и средства регулирования АДОднако наряду с использованием электроприводов
постоянного тока в последние годы с развитием
полупроводниковой техники все большее внимание
уделяется
применению
различных
систем
регулируемых электроприводов переменного тока с
асинхронными
двигателями
с
короткозамкнутым
ротором или двигателями с фазным ротором.
26.
Наибольшее распространение получили следующиеспособы
регулирования
угловой
скорости
асинхронного двигателя: 1) реостатное регулирование;
2) переключением числа полюсов; 3) изменением
частоты питающего напряжения; 4) каскадным
включением асинхронного двигателя с другими
машинами или преобразователями. Для регулирования
угловой скорости, кроме упомянутых, могут быть
использованы некоторые другие способы включения
электрических двигателей: импульсное регулирование,
регулирование изменением подводимого к статору
напряжения,
регулирование
с
помощью
электромагнитной муфты скольжения и др.
27.
Реостатное и импульсное параметрическоерегулирование угловой скорости асинхронного
электропривода
Регулирование осуществляется вниз от основной
угловой скорости.
Если считать, что рабочая часть механической
характеристики двигателя линейна, то модуль
жесткости реостатной характеристики
βР=Мном/ω0sном,р
где sном,р — скольжение на
характеристике, соответствующее
моменту.
(4.1)
реостатной
номинальному
28.
Если учесть, что диапазон регулированияD = ωmах/ωmin = (1 - sном)/( 1- sном,р),
то sном,р=( D-1+ sном)/ D
βР= DМном/( D-1+ sном )ω0
(4.2)
Формула (4.2) подтверждает сказанное — чем больше
диапазон регулирования, тем меньше жесткость
характеристик.
Потери мощности при реостатном регулировании
складываются из переменных потерь, включающих
потери в меди статора и ротора и во внешних
резисторах роторной цепи, и постоянных — не
зависящих от нагрузки.
29.
Недостатками реостатного регулирования скоростиявляются:
1)
необходимость
дискретного
изменения
сопротивления в роторной цепи с помощью
силовых аппаратов, управляемых дистанционно
или вручную, что дает ступенчатое регулирование
скорости и исключает возможность использования
замкнутых систем автоматического управления;
2) невысокое быстродействие;
3) большие потери энергии.
30.
Схемавключения
короткозамкнутым
асинхронного
ротором
при
двигателя
с
импульсном
регулировании добавочного сопротивления (во
всех трех фазах) в цепи статора приведена на рис.
4.8, а. Механические характеристики двигателя,
включенного по этой схеме, для различных
значений скважности ε показаны на рис. 4.8, б.
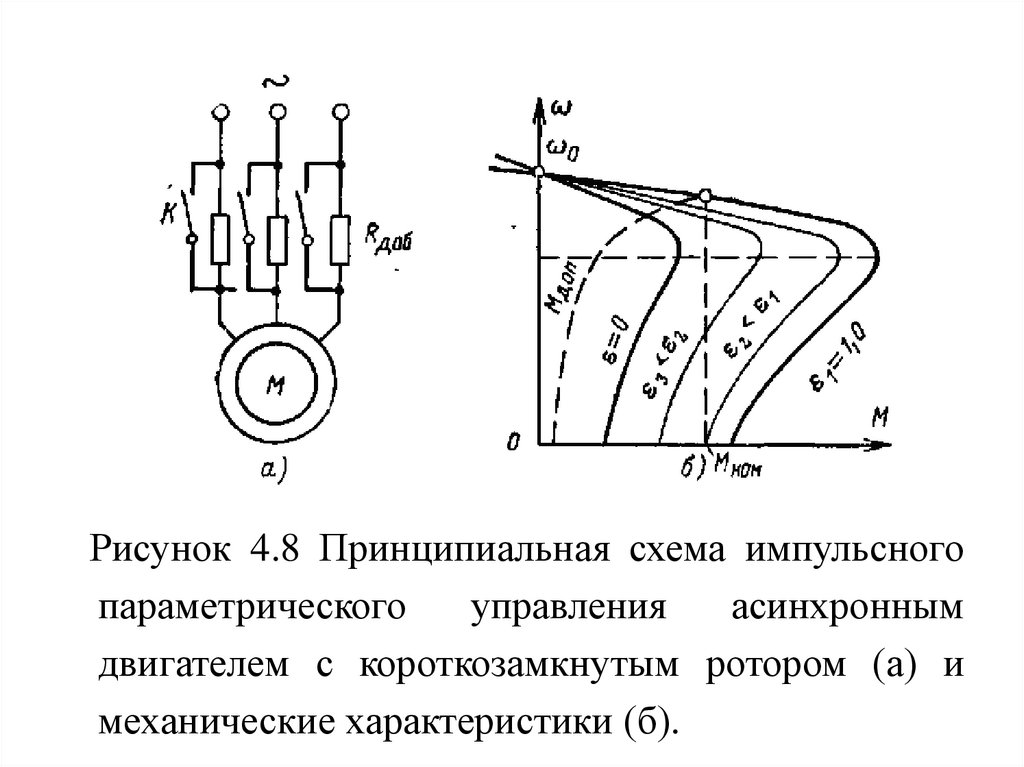
31.
Рисунок 4.8 Принципиальная схема импульсногопараметрического
управления
асинхронным
двигателем с короткозамкнутым ротором (а) и
механические характеристики (б).
32.
Лучшее использование двигателя при импульсномпараметрическом регулировании угловой скорости
асинхронного
двигателя
достигается,
когда
применяется двигатель с фазным ротором. В этом
случае
дополнительные
потери
мощности,
обусловленные регулированием угловой скорости, в
основном выделяются в добавочных резисторах вне
машины, поэтому допустимый момент для двигателя
с независимой вентиляцией оказывается примерно
равным
номинальному.
Схема
включения
асинхронного двигателя с фазным ротором при
импульсном параметрическом регулировании угловой
скорости приведена на рис. 4.9, а.
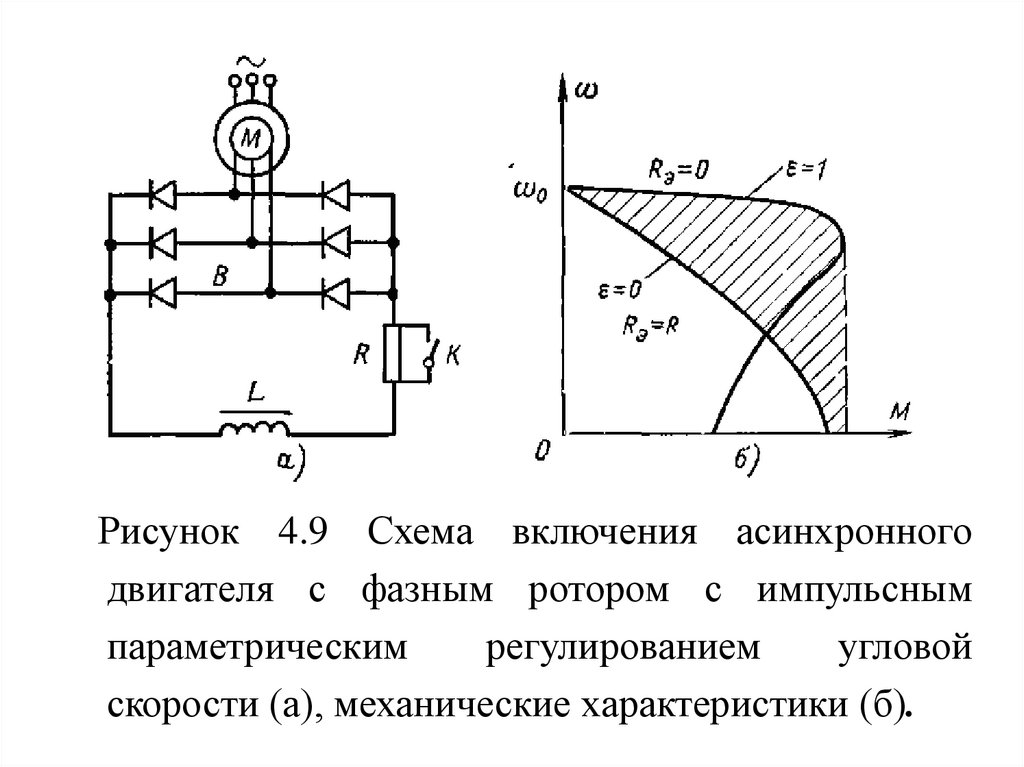
33.
Рисунок 4.9 Схема включения асинхронногодвигателя с фазным ротором с импульсным
параметрическим
регулированием
угловой
скорости (а), механические характеристики (б).
34.
Регулирование угловой скорости асинхронногоэлектропривода изменением напряжения
Максимальный момент при пониженном напряжении
снижается пропорционально квадрату напряжения:
MK,И = MK(UИ /UH0M)2
(4.7)
где МК,И,МК — соответственно максимальные моменты,
развиваемые
двигателем
при
сниженном
и
номинальном
напряжениях;
UИ,
UH0M
—
соответственно
пониженное
и
номинальное
напряжения.
Регулирование угловой скорости двигателя при этом
способе происходит за счет уменьшения модуля
жесткости
механических
характеристик
и
осуществляется вниз от номинальной угловой
35.
Рисунок 4.10 Механические характеристики двигателяс короткозамкнутым ротором при регулировании
напряжения на статоре.
36.
Лучшееиспользование
благоприятные
двигателя
характеристики
и
более
могут
быть
получены, если применить двигатель с фазным
ротором,
в
роторную
дополнительный
цепь
его
нерегулируемый
включить
резистор
и
регулировать напряжение на статоре (рис. 4.11, а).
37.
Рисунок 4.11 Схема включения двигателя сфазным ротором с нерегулируемым резистором в
роторной цепи и регулированием напряжения на
статоре (а) и механические характеристики (б).
38.
Простейшая принципиальная схема включенияасинхронного двигателя с короткозамкнутым
ротором при импульсном регулировании
напряжения.
Рисунок 4.12 Схемы включения
короткозамкнутым
ротором
с
регулированием напряжения.
двигателя с
импульсным
39.
Рисунок4.13
двигателей,
Механические
управляемых
изображенным на рис. 4.12.
характеристики
по
схемам,
40.
Регулирование угловой скорости асинхронногоэлектропривода переключением числа полюсов
Из выражения для угловой скорости асинхронного
двигателя:
ω = ω0 (1 -s) =2πƒ1(1 -s)/p
(4.8)
следует, что угловую скорость можно регулировать,
изменяя число пар полюсов р, если задана частота
питающей сети ƒ1 и мало изменяется скольжение s.
41.
42.
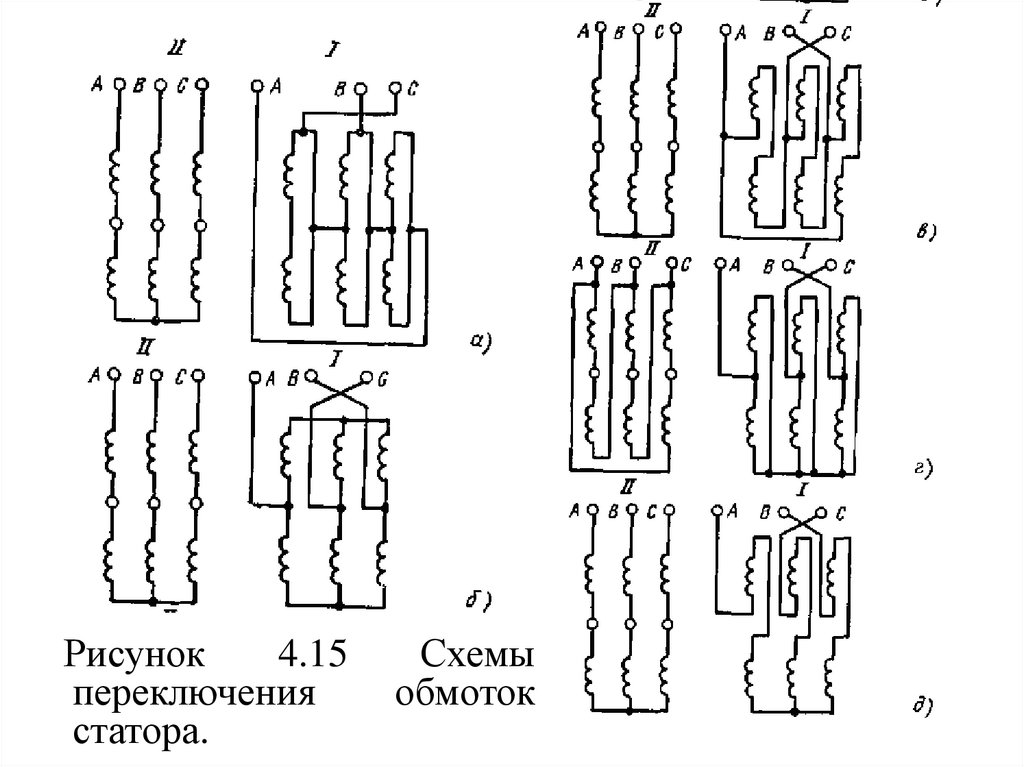
Рисунок4.15
переключения
статора.
Схемы
обмоток
43.
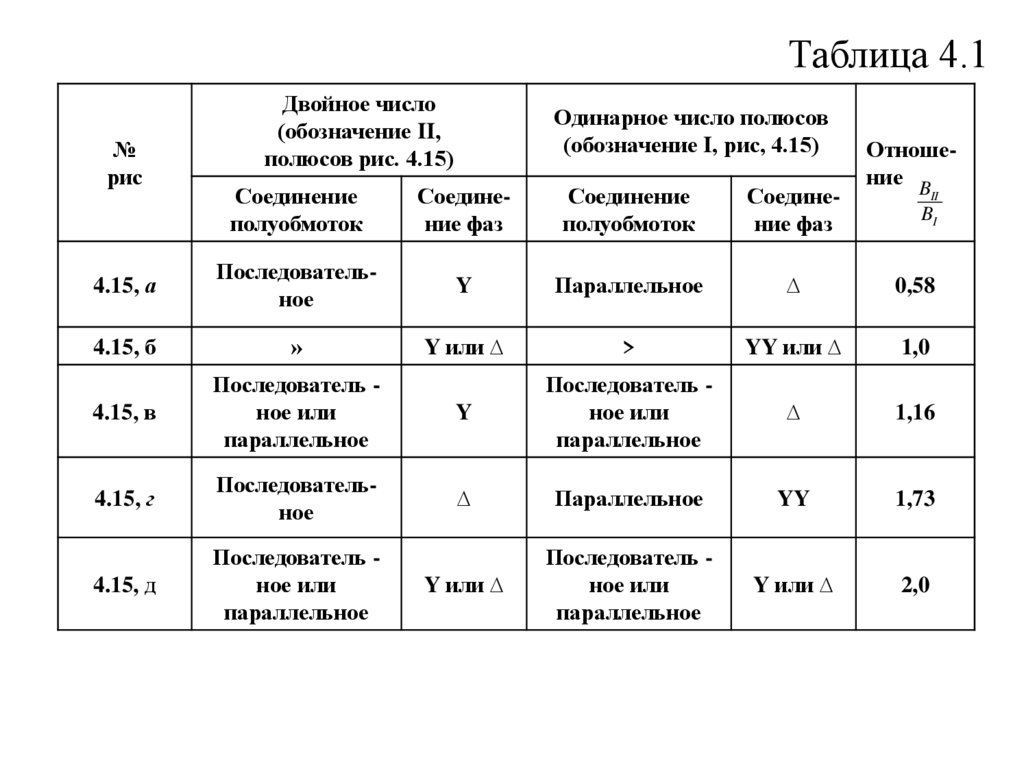
Таблица 4.1№
рис
Двойное число
(обозначение II,
полюсов рис. 4.15)
Одинарное число полюсов
(обозначение I, рис, 4.15)
Отношение B
Соединение
полуобмоток
Соединение фаз
Соединение
полуобмоток
Соединение фаз
4.15, а
Последовательное
Y
Параллельное
∆
0,58
4.15, б
»
Y или ∆
>
YY или ∆
1,0
4.15, в
Последователь ное или
параллельное
Y
Последователь ное или
параллельное
∆
1,16
4.15, г
Последовательное
∆
Параллельное
YY
1,73
4.15, д
Последователь ное или
параллельное
Y или ∆
Последователь ное или
параллельное
Y или ∆
2,0
II
BI
44.
Если принять для упрощения обмоточныйкоэффициент kобI= kобII и cos ψ2I =cos ψ2II, то получим:
M
(4.10)
II/M
I
=ω
III2‘IIp
IIФ
II/
ω
II2‘Ip
IФ
I
Так как pIIФII=АВII; pIФI=АВI, где А —
конструктивный коэффициент машины, то, полагая,
что ω III2‘II≈ω II2‘I, получаем:
M II/M I=В II/В I.
(4.11)
Следовательно, моменты, развиваемые двигателем
с различными схемами соединения обмоток статора,
отвечающими разным числам полюсов, относятся как
45.
Частотное регулирование асинхронныхэлектроприводов
При регулировании частоты также возникает
необходимость регулирования амплитуды напряжения
источника, что следует из выражения U1≈E1=kФƒ1.
Если при неизменном напряжении изменять частоту,
то поток будет изменяться обратно пропорционально
частоте. Так, при уменьшении частоты поток
возрастет и это приведет к насыщению стали машины
и как следствия к резкому увеличению тока и
превышению температуры двигателя; при увеличении
частоты поток будет уменьшаться, и как следствие,
будет уменьшаться допустимый момент.
46.
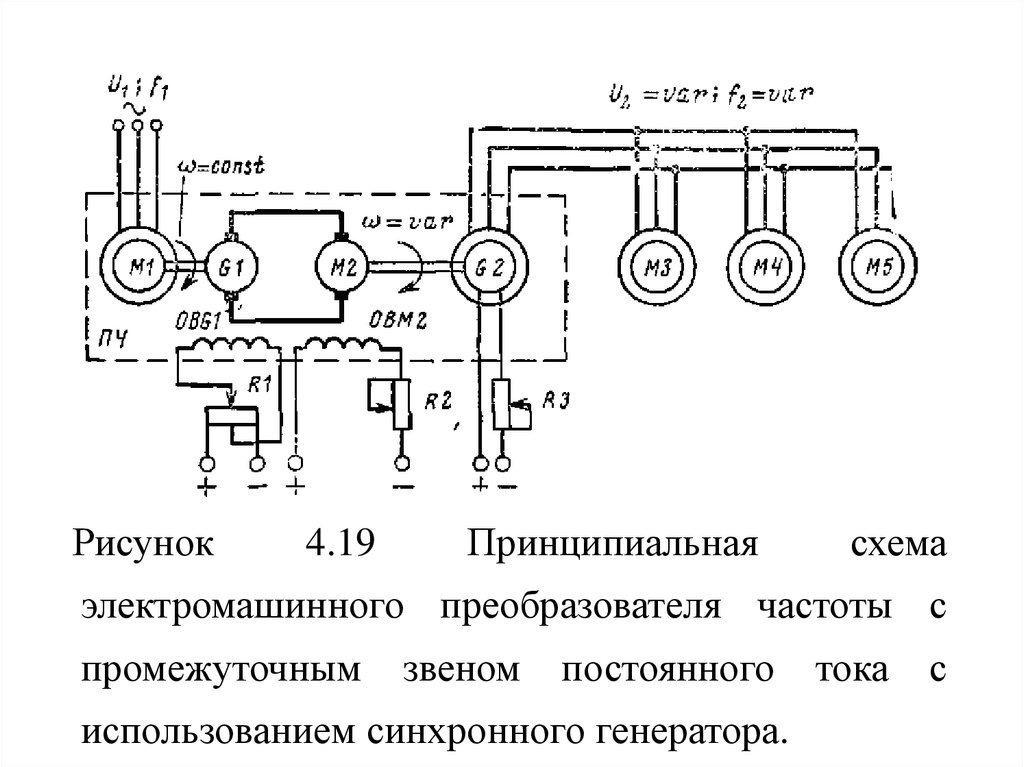
Рисунок4.19
Принципиальная
схема
электромашинного преобразователя частоты с
промежуточным
звеном
постоянного
использованием синхронного генератора.
тока
с
47.
Если мощность, потребляемая асинхроннымидвигателями от источника регулируемой частоты,
равна Рном, то при пренебрежении потерями в
машинах
общая
установленная
мощность
преобразователя частоты составит:
Рп.ч = РМ1+РG1+РМ2 + РG2 = 4Рном.
В схемах электромашинного преобразователя частоты
могут быть использованы в качестве основного
преобразователя обычные асинхронные машины с
фазным
ротором
в
режиме
асинхронного
преобразователя частоты.
48.
Частота на выходе АПЧ равна:ƒ2=ƒ1±ƒв,р,
(4.14)
где ƒв,р=ωp/2π; ω — скорость двигателя М2; ƒ1—
частота напряжения питания статора, принятая
равной частоте питающей сети.
Следовательно, при вращении ротора против поля
частота f2 > ƒ1, согласно с полем f2< ƒ1. При
неподвижном состоянии ротора АПЧ частота f2= ƒ1.
49.
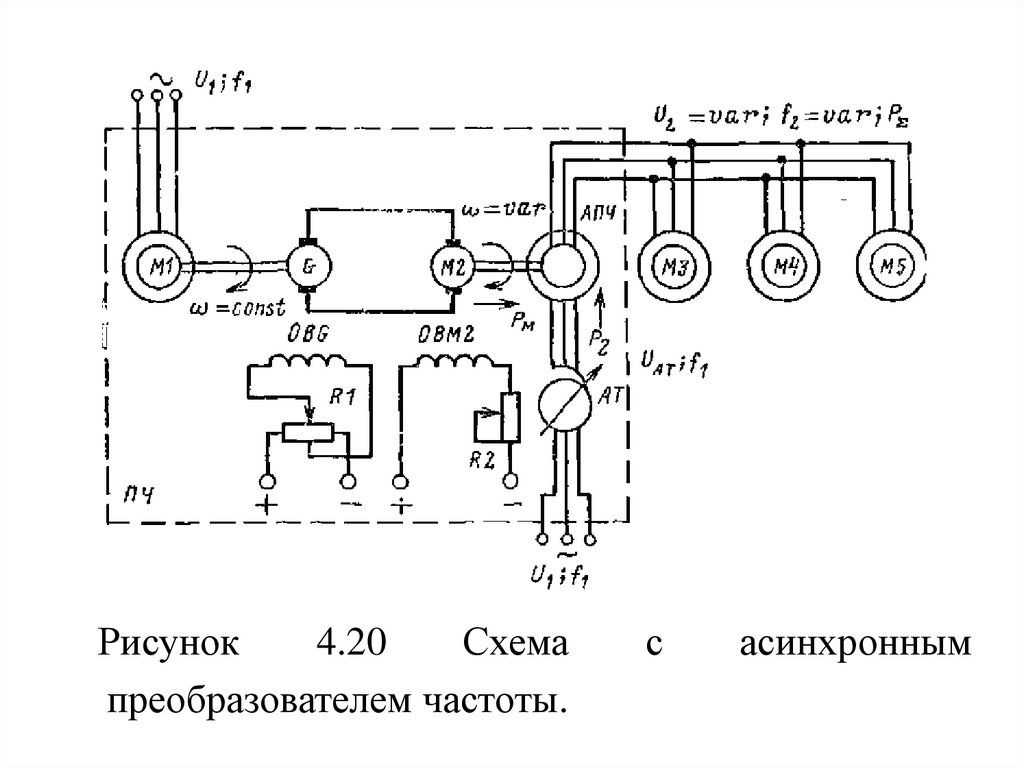
Рисунок4.20
Схема
преобразователем частоты.
с
асинхронным
50.
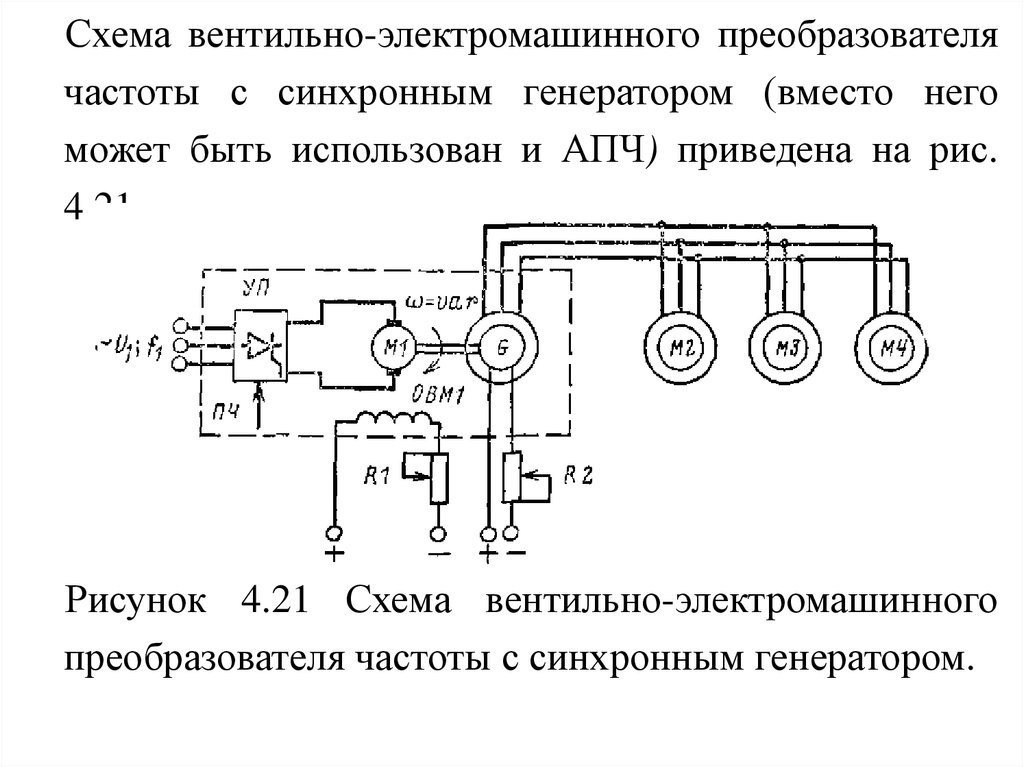
Схема вентильно-электромашинного преобразователячастоты с синхронным генератором (вместо него
может быть использован и АПЧ) приведена на рис.
4.21.
Рисунок 4.21 Схема вентильно-электромашинного
преобразователя частоты с синхронным генератором.
51.
Указанные недостатки ограничивают применениеэлектромашинных преобразователей и приводят к
необходимости
создания
статических
преобразователей
на
основе
использования
тиристоров или транзисторов.
По структуре схемы статических преобразователей
частоты
сходны
с
аналогичными
схемами
электромашинных преобразователей и могут быть
представлены двумя основными классами:
1) с непосредственной связью
2) с промежуточным звеном постоянного тока.
52.
а)Рисунок
4.22
Преобразователь
непосредственной связью.
б)
частоты
с
53.
Рисунок 4.23 Форма выходного напряжениятрехфазного
преобразователя
частоты
с
непосредственной связью.
54.
Преобразовательчастоты
с
непосредственной
связью можно использовать в случаях, когда частота
питающей
сети
много
выше
частоты
нагрузки
(например, если питающая сеть имеет частоту 400 Гц,
а двигатель серийного использования рассчитан на 50
Гц).
Кроме
того,
данный
тип
преобразователя
целесообразно применить для регулирования угловой
скорости асинхронного двигателя с фазным ротором,
работающего в режиме двойного питания, когда статор
его присоединен к сети, а ротор питается от той же
сети через преобразователь частоты.
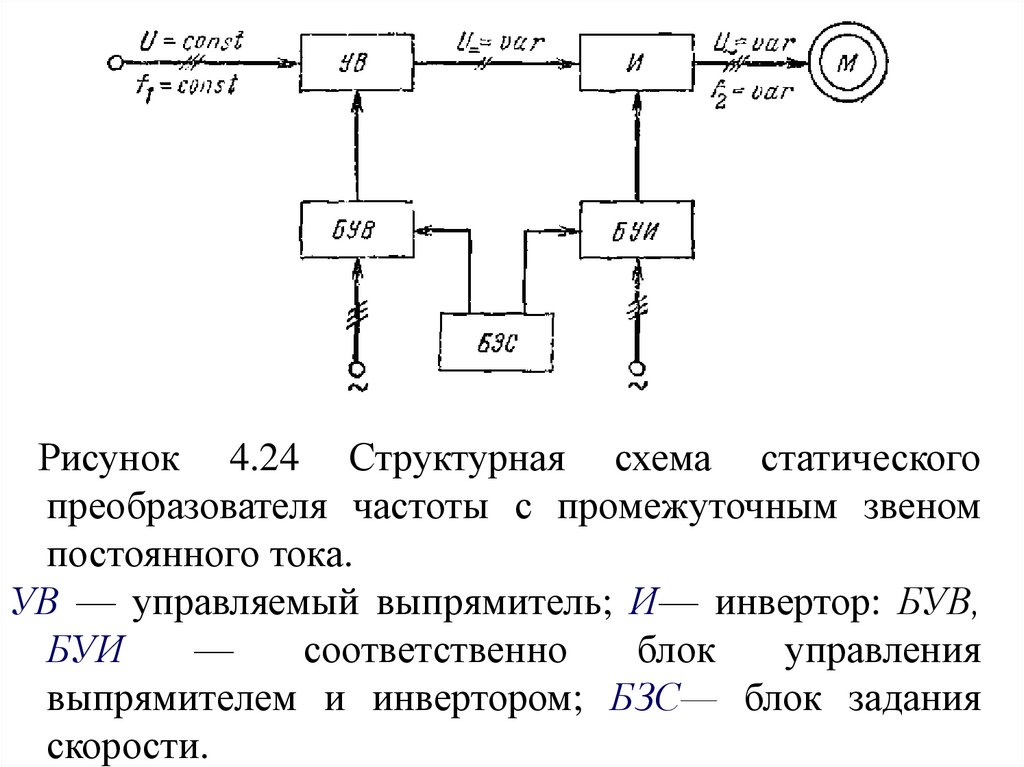
55.
Рисунок 4.24 Структурная схема статическогопреобразователя частоты с промежуточным звеном
постоянного тока.
УВ — управляемый выпрямитель; И— инвертор: БУВ,
БУИ
—
соответственно
блок
управления
выпрямителем и инвертором; БЗС— блок задания
скорости.
56.
Преобразовательс
промежуточным
звеном
постоянного тока позволяет регулировать частоту как
вверх, так и вниз от частоты питающей сети; он
отличается высоким КПД (около 0,96), значительным
быстродействием, малыми габаритами, сравнительно
высокой надежностью и бесшумен в работе.
57.
4.4 Частотно-регулируемый асинхронныйэлектропривод
Двигатели с короткозамкнутым ротором - самые
распрастраненные электрические машины - до
недавнего времени использовались лишь в
нерегулируемом
электроприводе
поскольку
практически единственная возможность эффективно
регулировать скорость - изменять частоту
напряжения, приложенного к старторным обмоткам,
была технически трудно реализуема. Сейчас,
благодаря
успехам
электроники,
ситуация
кардинально изменилась, и частотно-регулируемый
электропривод - рис. 4.25,а стал основным типом
регулируемого электропривода.
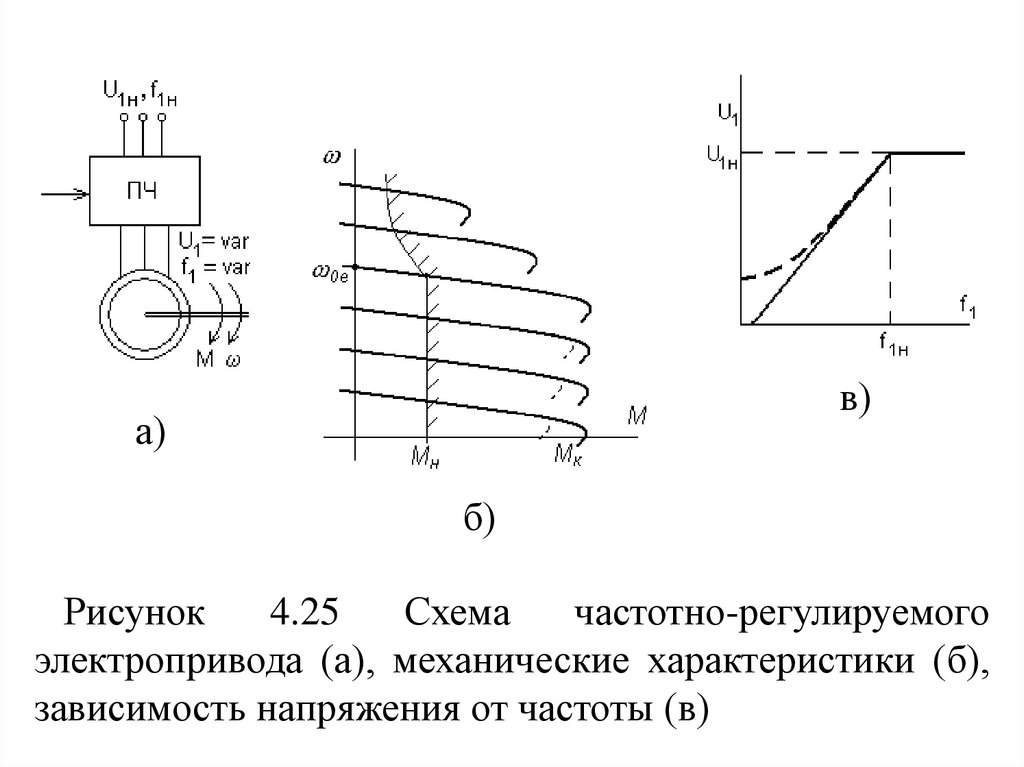
58.
в)а)
б)
Рисунок
4.25
Схема
частотно-регулируемого
электропривода (а), механические характеристики (б),
зависимость напряжения от частоты (в)
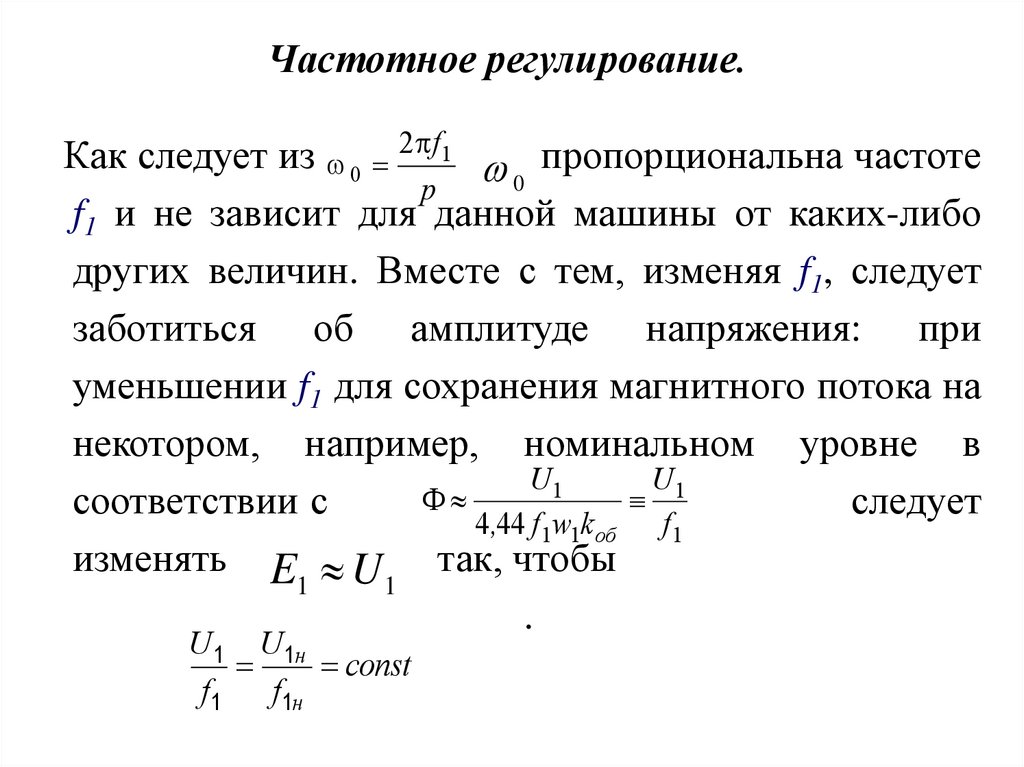
59.
Частотное регулирование.Как следует из 0 2 f 1 пропорциональна частоте
0
p
f1 и не зависит для данной машины от каких-либо
других величин. Вместе с тем, изменяя f1, следует
заботиться об амплитуде напряжения: при
уменьшении f1 для сохранения магнитного потока на
некотором, например, номинальном уровне в
U1
U1
соответствии с
следует
4 ,44 f1w1kоб f1
изменять E U так, чтобы
1
1
.
U 1 U 1н
const
f1 f1н
60.
При увеличении частоты от номинальной приU1=U1н поток будет уменьшаться.
2
3
U
1
Как следует из M к
, в пренебрежении
( 2 0 X к )
R1, т.е. в предположении, что E1 U1, критический
момент также пропорционален U
, тогда как
f
критическое
скольжение
sк
обратно
пропорционально f1.
Сопротивление цепи статора, которым мы
пренебрегаем, оказывает влияние на характеристики
особенно малых машин (киловатты) - пунктир на
рис. 4.8,б, поскольку при снижении частоты E1<U1.
Для компенсации этого влияния обычно несколько
увеличивают напряжение при низких частотах пунктир на рис. 4.25,в.
1
1
61.
Проведем оценку частотного регулированияскорости по введенным ранее показателям
1. Регулирование двухзонное - вниз ( U 1 f1 const ) и вверх
(U1=U1н, f1>f1н) от основной скорости.
2. Диапазон регулирования в разомкнутой структуре
(8-10):1. Стабильность скорости - высокая.
3. Регулирование плавное.
4. Допустимая нагрузка - М=Мн при регулировании
вниз от основной скорости (Ф const), Р = Рн при
регулировании вверх (Ф < Фн).
62.
Способ экономичен в эксплуатации - нетдополнительных элементов, рассеивающих энергию;
как будет показано далее, малы потери в переходных
U1
const
процессах. Несомненное достоинство
- гибкость
f1
управления координатами в замкнутых структурах.
Современные методы так называемого векторного
управления обеспечивают частотно-регулируемому
электроприводу практически те же свойства по
управляемости, которые имеет самый совершенный
электропривод постоянного тока.
6. Способ требует использования преобразователя
частоты (ПЧ) - устройства, управляющего частотой
и амплитудой выходного напряжения.
5.
63.
Переход от нерегулируемого электропривода крегулируемому
во
многих
технологиях
рассматривается как основное направление развития
электропривода, поскольку при этом существенно
повышается качество технологических процессов и
экономится до 30% электроэнергии. Это определяет
перспективы
развития
частотно-регулируемого
электропривода.
64.
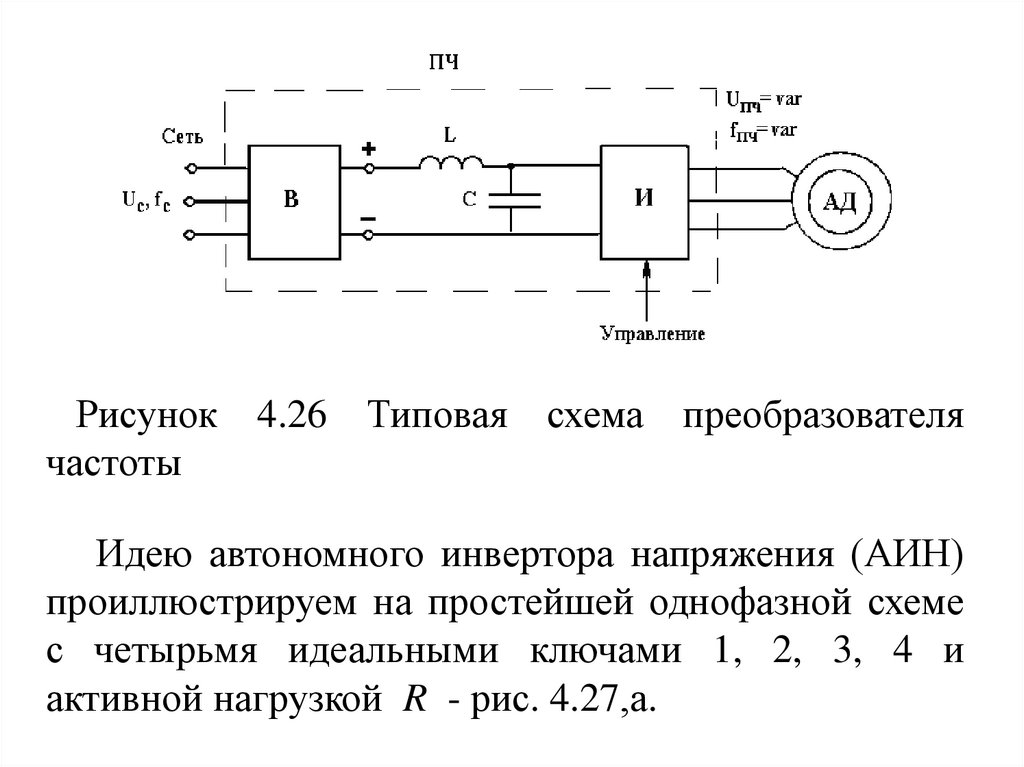
Рисунок 4.26 Типовая схема преобразователячастоты
Идею автономного инвертора напряжения (АИН)
проиллюстрируем на простейшей однофазной схеме
с четырьмя идеальными ключами 1, 2, 3, 4 и
активной нагрузкой R - рис. 4.27,а.
65.
а)б)
Рисунок 4.27 Однофазный инвертор, нагруженный
активным сопротивлением (а), и диаграмма работы (б)
66.
а)б)
Рисунок 4.28 Однофазный инвертор с R – L нагрузкой
(а) и диаграмма работы (б)
67.
а)б)
Рисунок 4.29 Схема трехфазного инвертора (а) и
диаграмма коммутации (б)
68.
Рисунок 4.30 Диаграммы токов (а) и напряжений (б) наинтервале I
69.
а)б)
Рисунок 4.31 Диаграммы токов (а) и напряжений (б) на
интервале II
70.
Повторяя подобные рассуждения для остальныхинтервалов, получим диаграммы фазных напряжений
на рис. 4.32.
Рисунок 4.32 Форма напряжений на выходе инвертора
71.
Изложенный принцип преобразования постоянногонапряжения
в
переменное,
основанный
на
использовании управляемых ключей, в различных
модификациях
и
вариантах
используется
в
подавляющем
большинстве
современных
преобразователей частоты.
Идею
построения
автономного
инвертора
напряжения с ШИМ проиллюстрируем на простейшей
идеализированной однофазной схеме с чисто активной
нагрузкой - рис. 4.27,а.
72.
а)б)
Рисунок 4.33 ШИМ на интервале (а) и на половине
периода выходной частоты (б)
73.
Меняя на каждом интервале относительнуюt i1
ширину импульса i
, можно легко управлять
средним за интервал напряжением Uiср, т.е.
формировать на каждом полупериоде любую нужную
форму напряжения, как показано на рис. 4.33,б. С
увеличением n будет уменьшаться и ступенчатая
кривая будет приближаться к заданной плавной. Кроме
этого, продолжительность интервала может меняться
при формировании выходного напряжения инвертора в
течении периода Т.
74.
Полно реализовать широкие возможности ШИМудалось лишь в последние 5 - 10 лет с появлением на
рынке
совершенных
ключей,
в
частности,
транзисторных модулей IGBT с напряжением до 1200
В, током до 600 А и частотой коммутации до 30 кГц, а
также средств управления ими.
IGBT (Insulated Gate Bipolar Transistor) представляют
собой p-n-p -транзистор, управляемый через
высоковольтный n-канальный полевой транзистор.
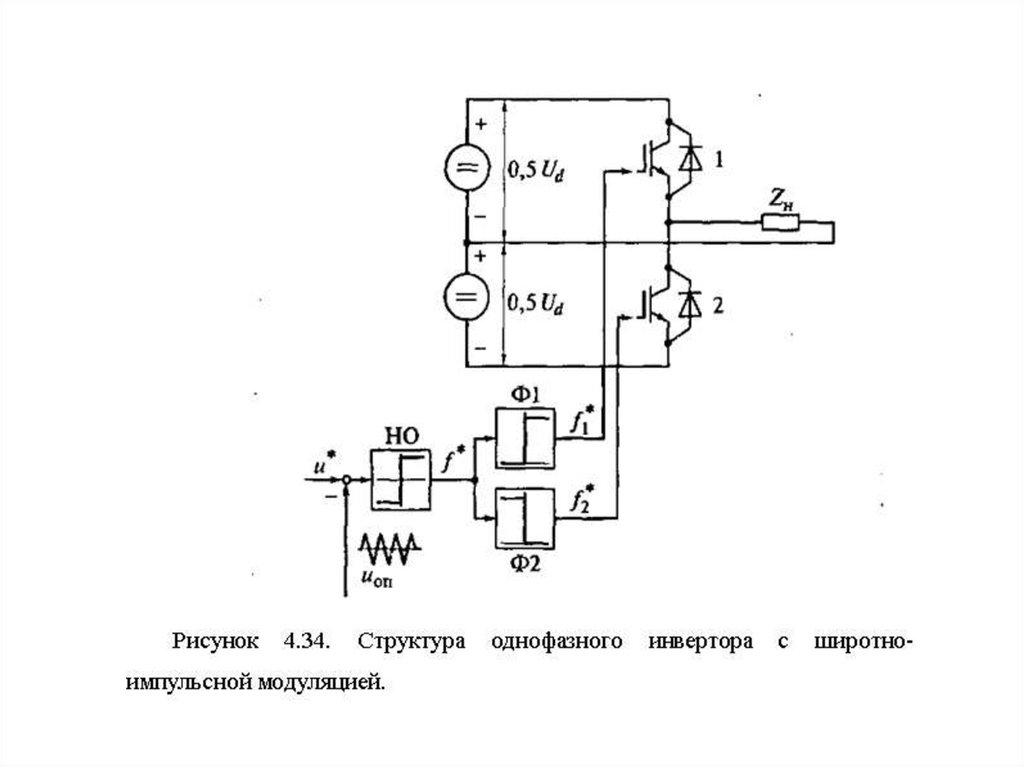
75.
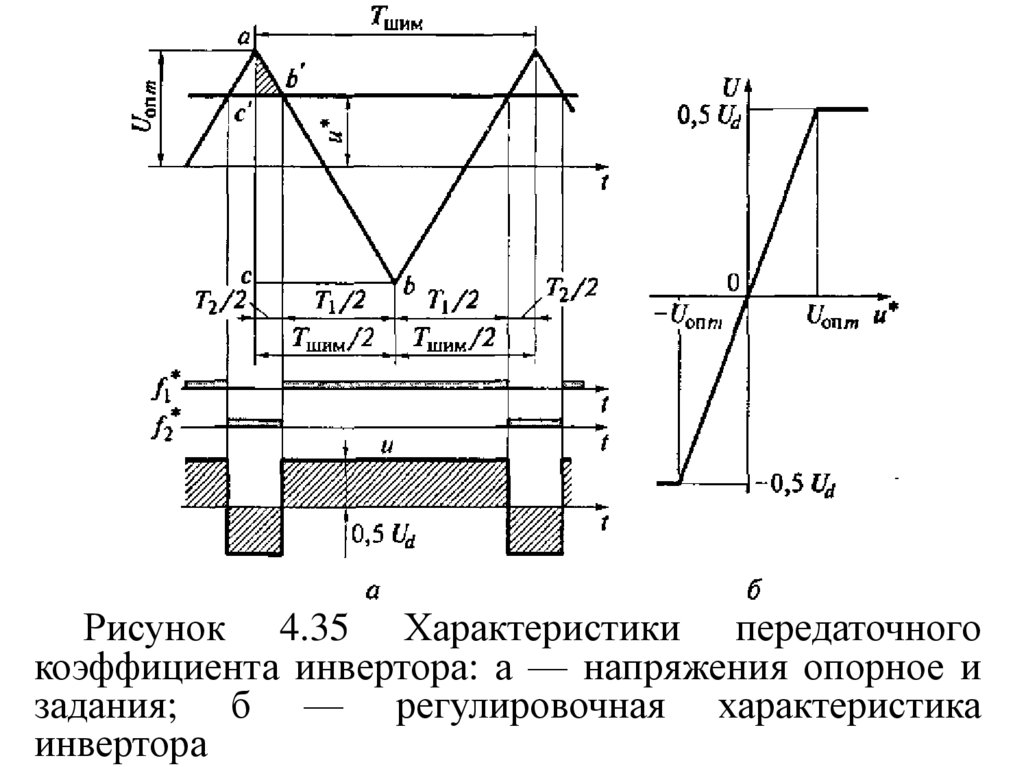
76.
Рисунок 4.35 Характеристики передаточногокоэффициента инвертора: а — напряжения опорное и
задания; б — регулировочная характеристика
инвертора
77.
78.
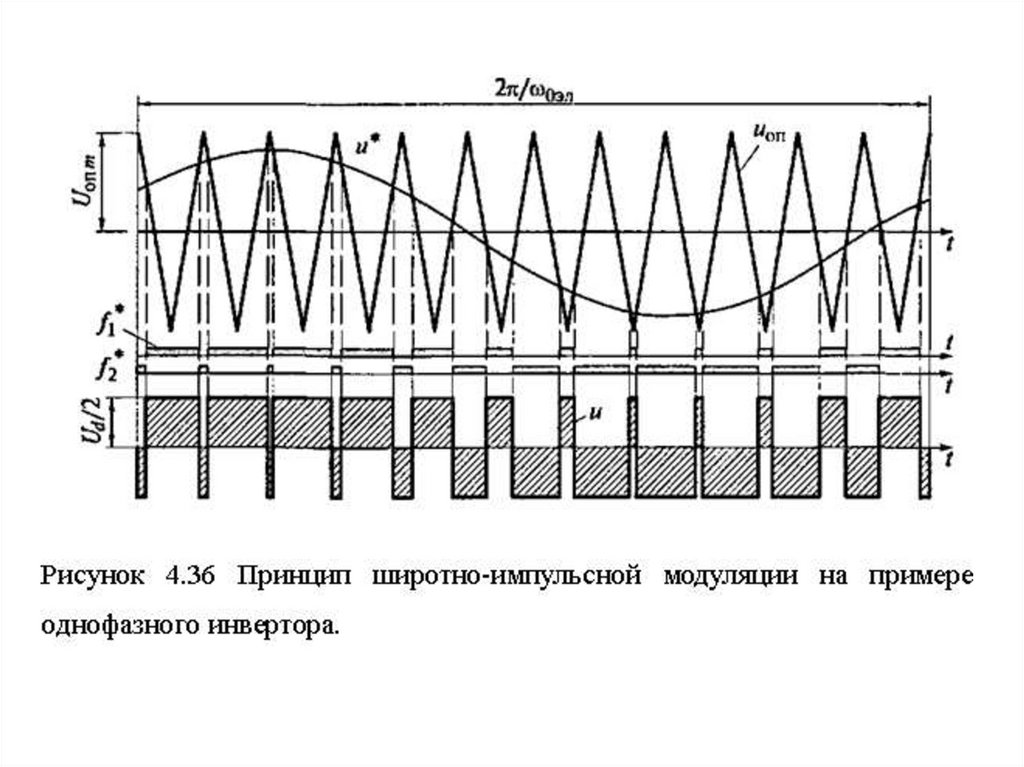
79.
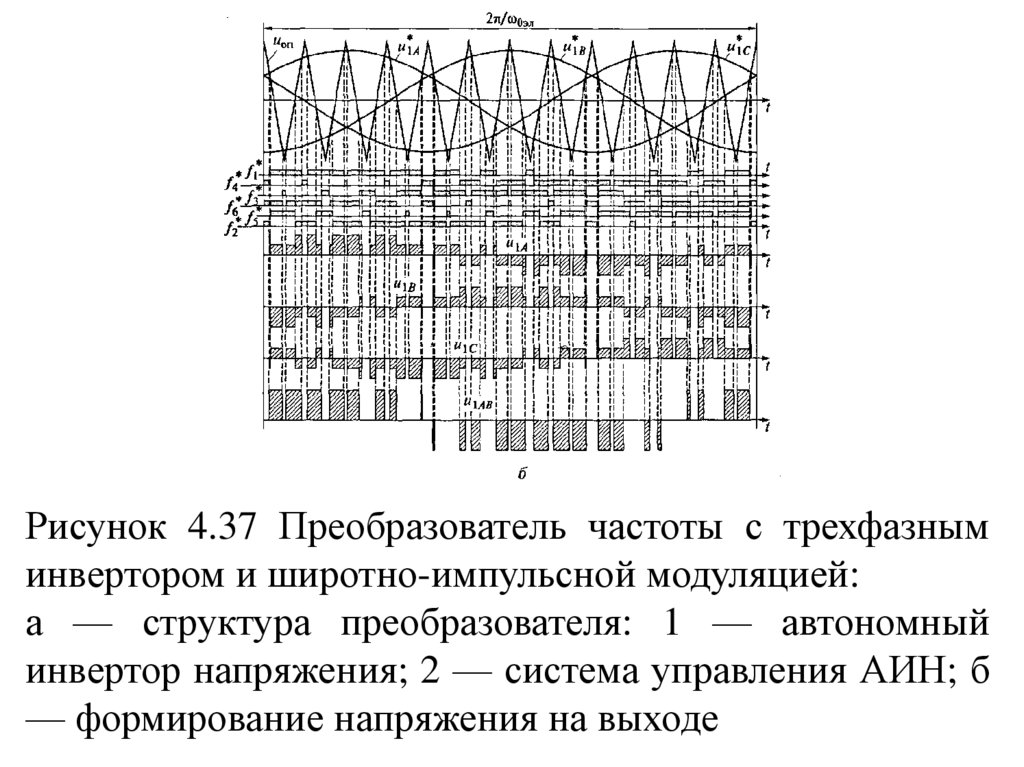
Рисунок 4.37 Преобразователь частоты с трехфазныминвертором и широтно-импульсной модуляцией:
а — структура преобразователя: 1 — автономный
инвертор напряжения; 2 — система управления АИН; б
— формирование напряжения на выходе
80.
Рекуперативный тормозной режим асинхронногодвигателя при питании от преобразователя
частоты со звеном постоянного тока
Как отмечалось ранее, транзисторные ключи,
образующие плечи автономного инвертора, обладают
двухсторонней проводимостью, так как каждый
транзистор, пропускающий ток в прямом направлении,
шунтирован диодом обратного тока. Поэтому
инвертор, построенный с использованием таких
ключей, тоже может передавать мощность в обоих
направлениях.
81.
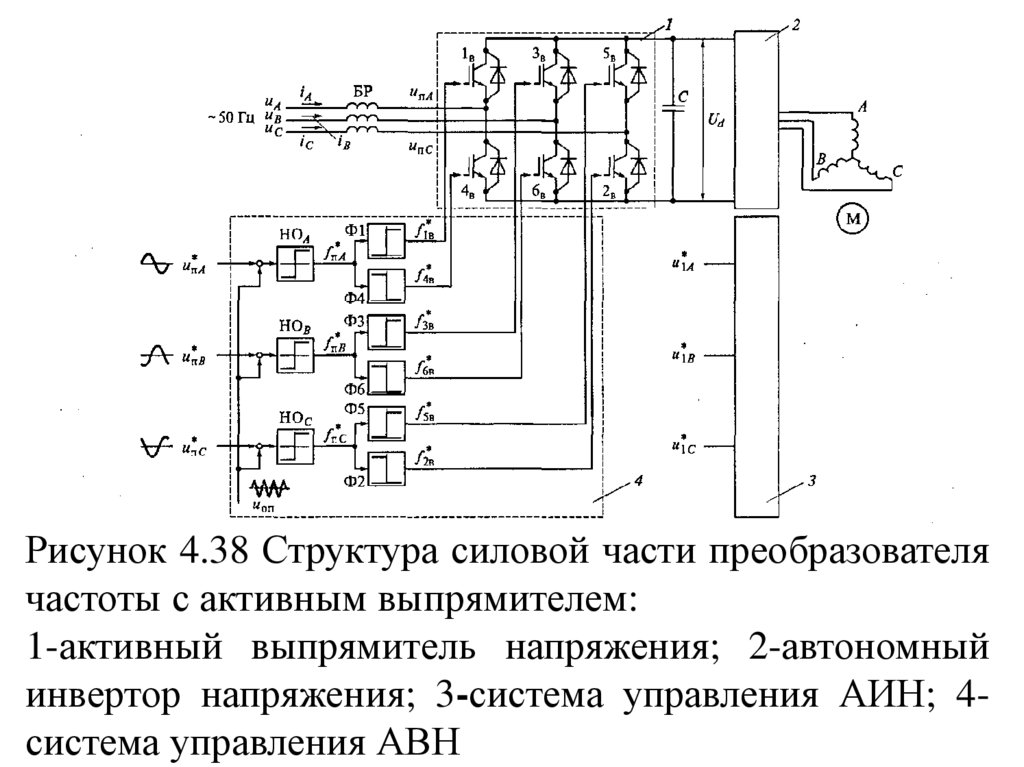
Рисунок 4.38 Структура силовой части преобразователячастоты с активным выпрямителем:
1-активный выпрямитель напряжения; 2-автономный
инвертор напряжения; 3-система управления АИН; 4система управления АВН
82.
В двигательном режиме, когда двигательпотребляет мощность из сети, АВН работает в
режиме выпрямителя, а АИН — в режиме инвертора.
При этом большая часть тока в транзисторных ключах
АВН 1В—6В протекает через диоды обратного тока. В
режиме
торможения
АИН
переходит
в
выпрямительный режим, а АВН работает в режиме
инвертора, инвертируя напряжение на конденсаторе
С. При этом ток протекает, в основном, через
транзисторы транзисторных ключей.
Применение
широтно-импульсной
модуляции
позволяет получить близкую к синусоидальной
форму токов iA, iB, iС, потребляемых из сети. Меняя
начальную фазу сигналов управления, можно
изменять коэффициент мощности преобразователя.
83.
4.5 Регулирование скорости асинхронныхдвигателей в специальных (каскадных) схемах
Каскадные электроприводы с асинхронными
двигателями с фазным ротором в отличие от
асинхронных электроприводов с параметрическими и
импульсными способами управления целесообразно
применять в установках средней и большой
мощности, работающих в продолжительном режиме
при
относительно
небольших
диапазонах
регулирования.
84.
Каскадные электроприводы позволяют полезноиспользовать энергию скольжения, повышая при этом
эффективность электропривода. Они легко поддаются
автоматизации и позволяют обеспечить оптимальный
режим работы производственного механизма.
Каскадные электроприводы в зависимости от того, как
реализуется энергия скольжения, разделяются на
электрические и электромеханические. В электрических
каскадах энергия скольжения за вычетом потерь
возвращается
в
питающую
сеть.
В
электромеханических
энергия
скольжения,
преобразованная
в
механическую
энергию,
возвращается на вал основного асинхронного
двигателя.
85.
Включение в роторную цепь активных элементов,при f1 = const появляется возможность не потерять, а
истратить полезно мощность скольжения P2 P1s ,
отдав её либо в сеть, либо на вал двигателя.
Электроприводы такого типа называют каскадами или
каскадными схемами.
86.
а)б)
в)
г)
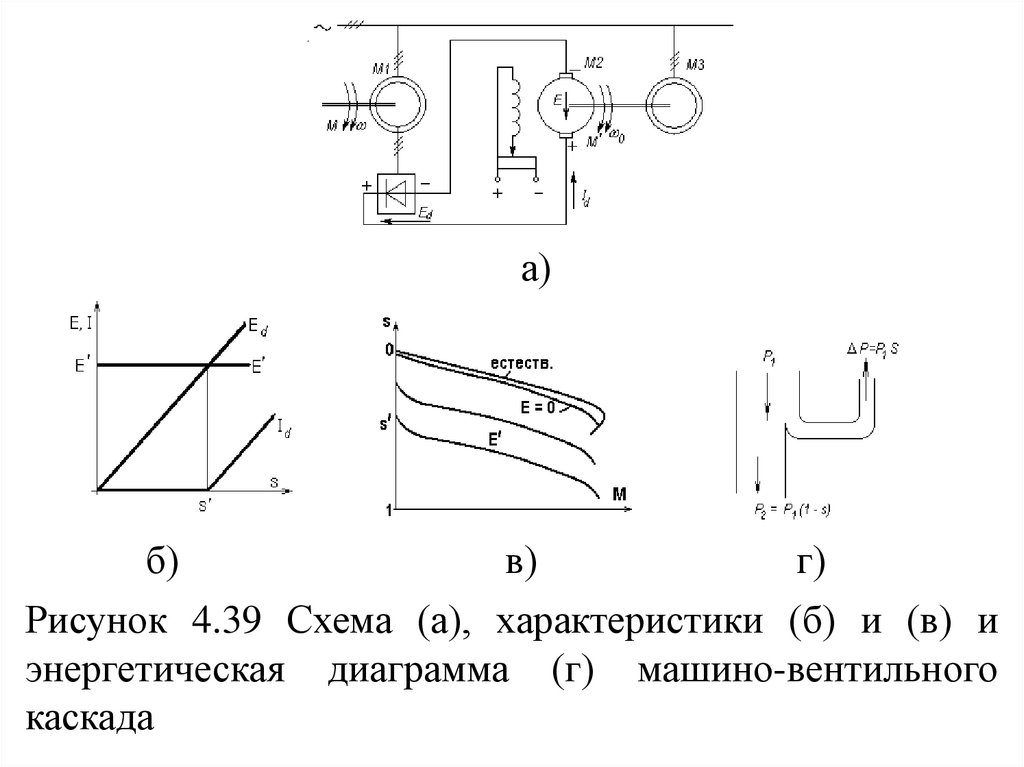
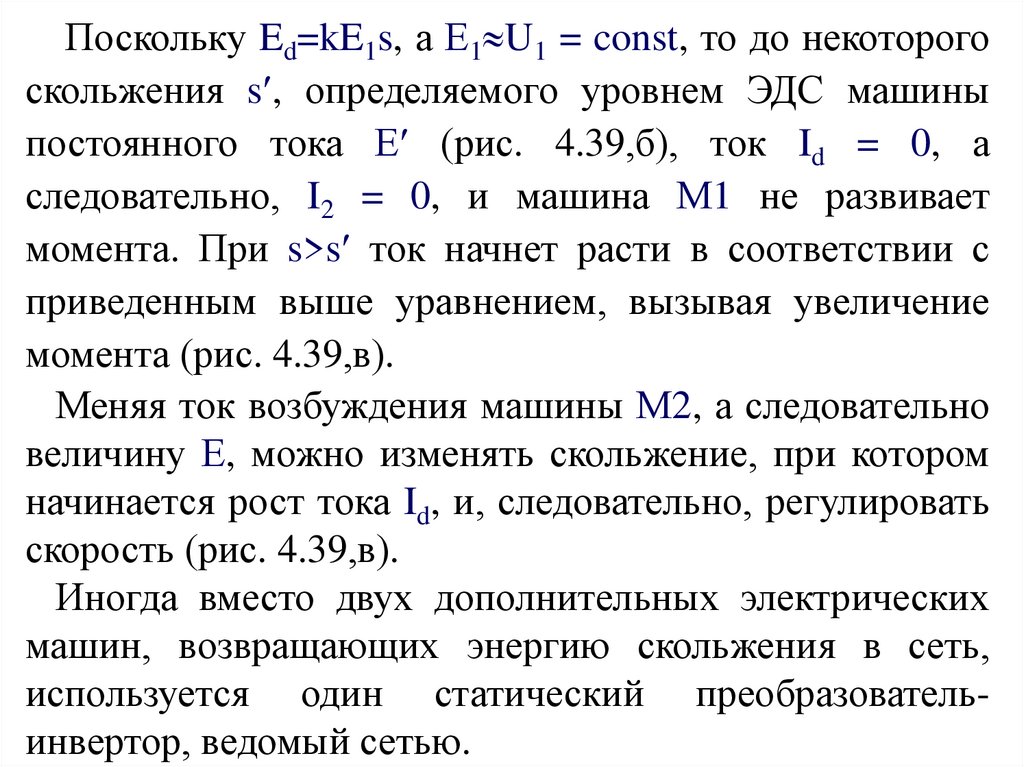
Рисунок 4.39 Схема (а), характеристики (б) и (в) и
энергетическая диаграмма (г) машино-вентильного
каскада
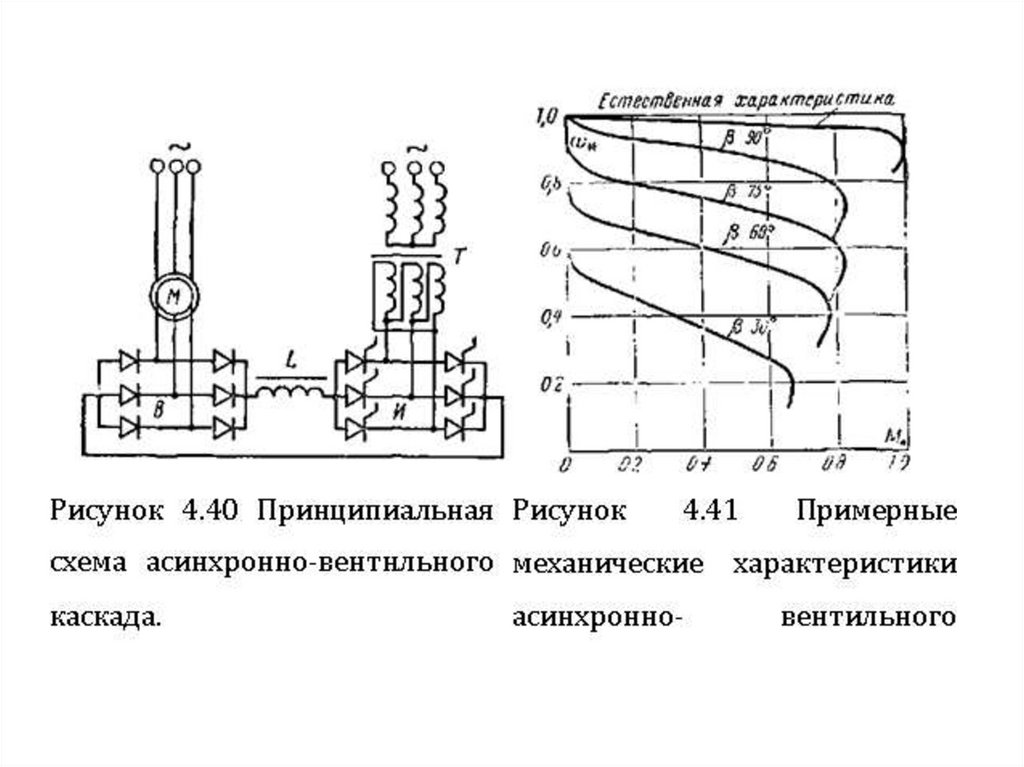
87.
Поскольку Ed=kE1s, а Е1 U1 = const, то до некоторогоскольжения s , определяемого уровнем ЭДС машины
постоянного тока Е (рис. 4.39,б), ток Id = 0, а
следовательно, I2 = 0, и машина М1 не развивает
момента. При s>s ток начнет расти в соответствии с
приведенным выше уравнением, вызывая увеличение
момента (рис. 4.39,в).
Меняя ток возбуждения машины М2, а следовательно
величину Е, можно изменять скольжение, при котором
начинается рост тока Id, и, следовательно, регулировать
скорость (рис. 4.39,в).
Иногда вместо двух дополнительных электрических
машин, возвращающих энергию скольжения в сеть,
используется один статический преобразовательинвертор, ведомый сетью.
88.
89.
Максимальнаяугловая
скорость
АВК
при
номинальном моменте составляет примерно 0,9ω0;
минимальная
угловая
скорость
практически
принимается равной 0,5ω0.
Энергия скольжения не обязательно должна
возвращаться в сеть, есть каскады, в которых она
отдается машиной М2 на вал главного асинхронного
двигателя.
90.
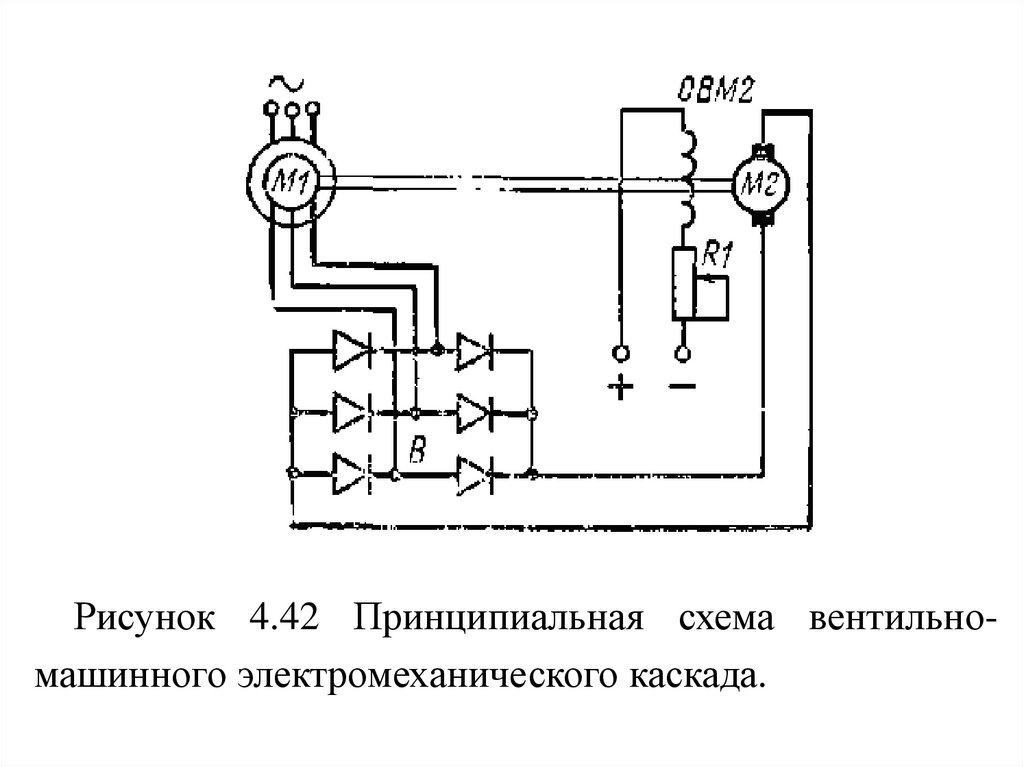
Рисунок 4.42 Принципиальная схема вентильномашинного электромеханического каскада.91.
Регулированиеугловой
спорости
привода
осуществляется, как и в случае вентильно-машинного
электрического каскада, изменением добавочной ЭДС,
создаваемой двигателем постоянного тока, в цепи
выпрямленного напряжения.
Каскадные схемы используются при очень больших
мощностях (тысячи киловатт) и малых диапазонах
регулирования - (1,1-1,2):1.
Электропривод с машиной двойного питания.
Каскадные
схемы
предполагали
управление
координатами в цепи выпрямленного тока ротора.
Вместе с тем существует и другая возможность включение в цепь ротора преобразователя частоты (рис.
4.43,а).
Структуры
такого
типа
называют
электроприводами с машинами двойного питания.
92.
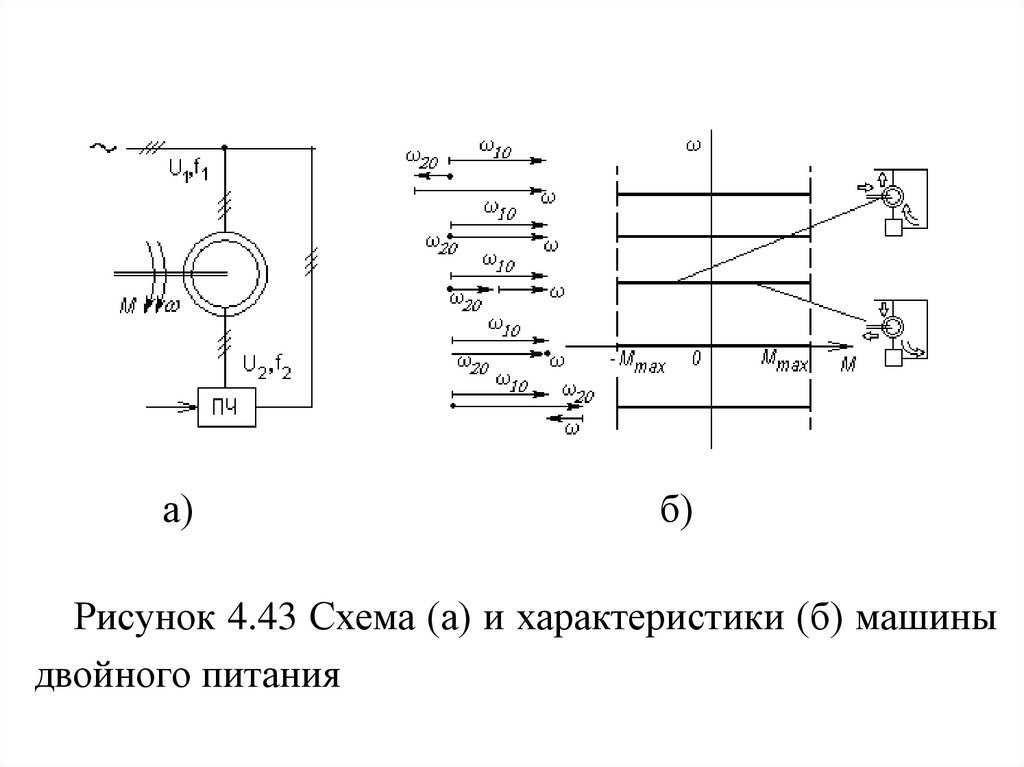
а)б)
Рисунок 4.43 Схема (а) и характеристики (б) машины
двойного питания
93.
Поскольку при преобразовании энергии поля должныбыть неподвижны относительно друг друга, должны
выдерживаться следующие соотношения скоростей и
частот:
10 20 ;
(4.18)
f1 = f2 + f,
(4.19)
где 10 , 20 - угловые скорости поля статора и поля
ротора относительно соответственно статора и ротора;
f1, f2 - частоты напряжения статора и ротора; f - частота,
соответствующая угловой скорости ротора.
94.
Из (4.18) и (4.19) следуют богатые возможностиуправления скоростью ротора : действительно,
фиксируя f1, т.е.
любые f и
, 10и
управляя
теоретически
в неограниченном диапазоне
(рис. 4.43,б);знаком “-” для f2 и
чередования
f 2, (можно
20 ) получать
фаз,
чему
направления вращения поля.
изменение
обозначено
соответствует
20
изменение