 Электроника
ЭлектроникаПохожие презентации:










Слежение за задержкой импульсного сигнала
1.
РАДИОАВТОМАТИКАЛекция 16
СЛЕЖЕНИЕ ЗА ЗАДЕРЖКОЙ
ИМПУЛЬСНОГО СИГНАЛА
2.
Передатчик1
Синхронизатор
2
Антенный
переключ.
3
Приемник
4
ВД
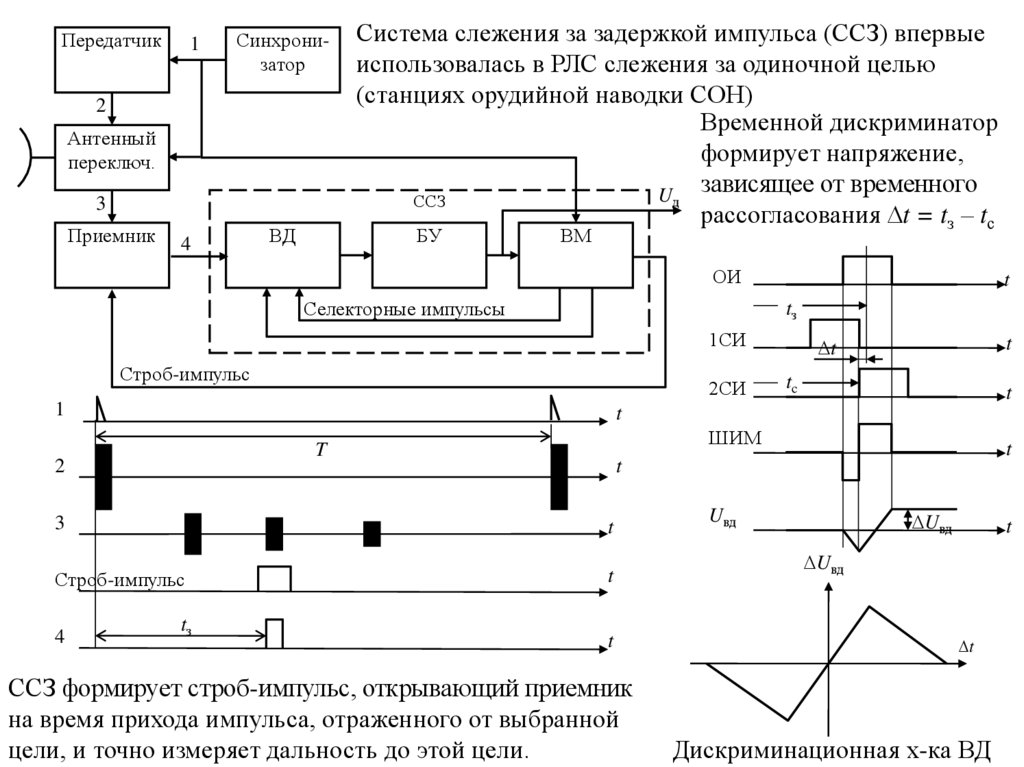
Система слежения за задержкой импульса (ССЗ) впервые
использовалась в РЛС слежения за одиночной целью
(станциях орудийной наводки СОН)
Временной дискриминатор
формирует напряжение,
Uд зависящее от временного
ССЗ
рассогласования t = tз – tс
БУ
ВМ
ОИ
Селекторные импульсы
t
tз
1СИ
Строб-импульс
2СИ
1
t
tc
t
t
ШИМ
T
2
t
Cтроб-импульс
t
tз
t
t
3
4
t
t
ССЗ формирует строб-импульс, открывающий приемник
на время прихода импульса, отраженного от выбранной
цели, и точно измеряет дальность до этой цели.
Uвд
Uвд
t
Uвд
t
Дискриминационная х-ка ВД
3.
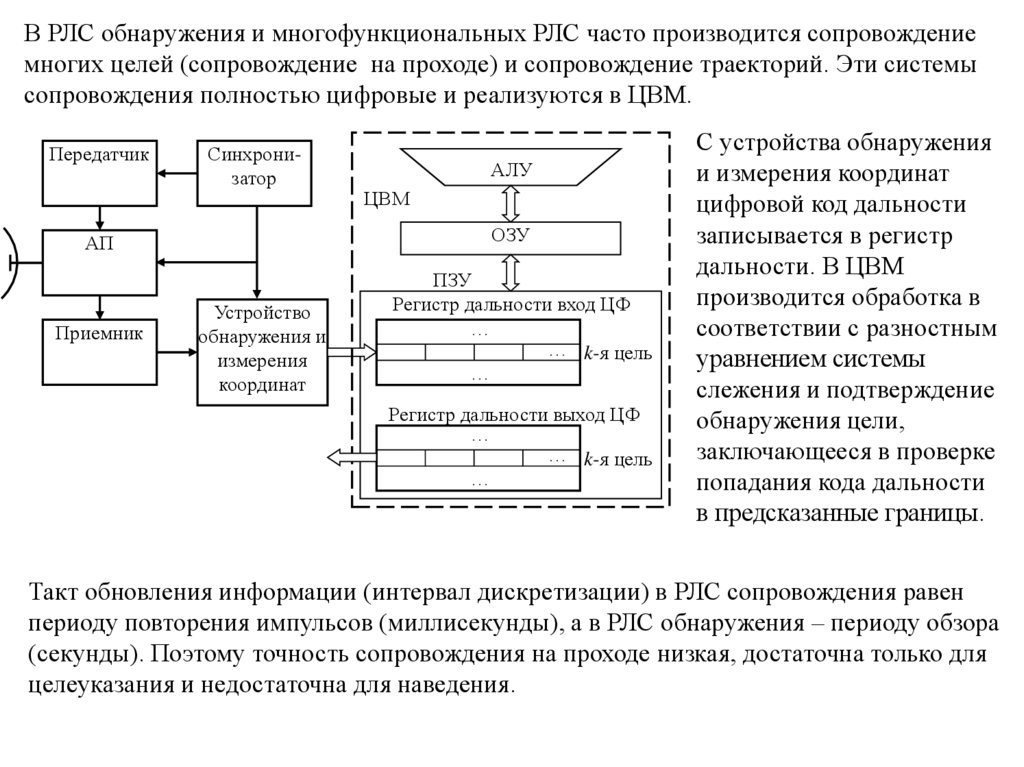
В РЛС обнаружения и многофункциональных РЛС часто производится сопровождениемногих целей (сопровождение на проходе) и сопровождение траекторий. Эти системы
сопровождения полностью цифровые и реализуются в ЦВМ.
Передатчик
Синхронизатор
ЦВМ
ОЗУ
АП
Приемник
АЛУ
Устройство
обнаружения и
измерения
координат
ПЗУ
Регистр дальности вход ЦФ
…
… k-я цель
…
Регистр дальности выход ЦФ
…
… k-я цель
…
С устройства обнаружения
и измерения координат
цифровой код дальности
записывается в регистр
дальности. В ЦВМ
производится обработка в
соответствии с разностным
уравнением системы
слежения и подтверждение
обнаружения цели,
заключающееся в проверке
попадания кода дальности
в предсказанные границы.
Такт обновления информации (интервал дискретизации) в РЛС сопровождения равен
периоду повторения импульсов (миллисекунды), а в РЛС обнаружения – периоду обзора
(секунды). Поэтому точность сопровождения на проходе низкая, достаточна только для
целеуказания и недостаточна для наведения.
4.
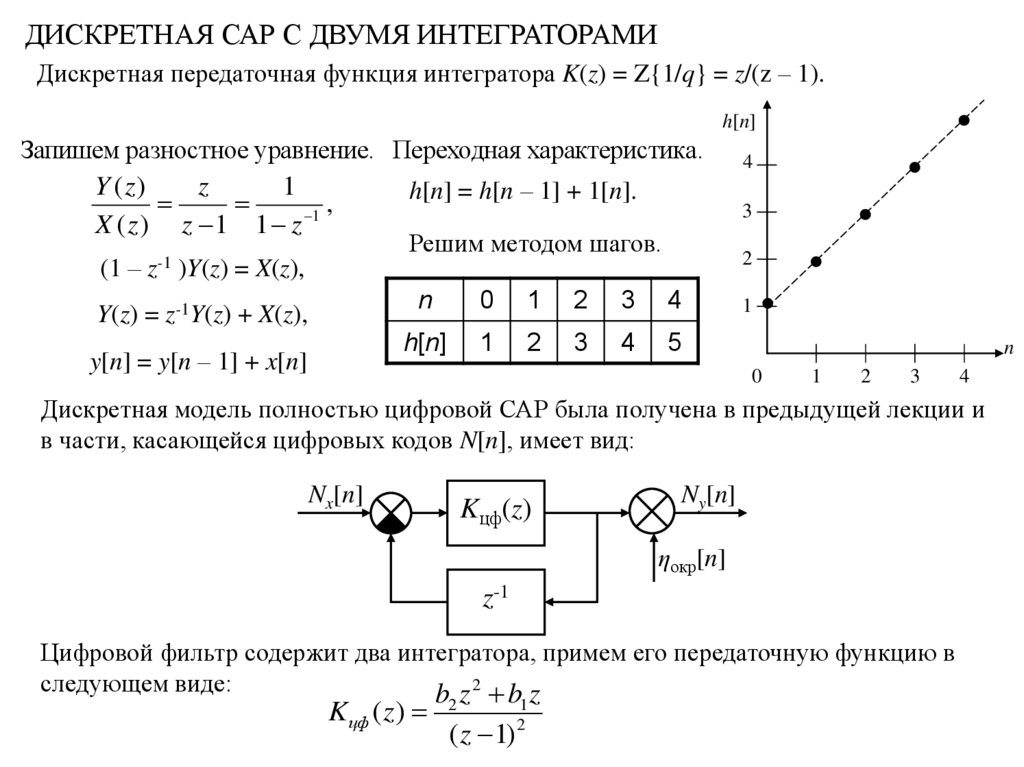
ДИСКРЕТНАЯ САР С ДВУМЯ ИНТЕГРАТОРАМИДискретная передаточная функция интегратора K(z) = Z{1/q} = z/(z – 1).
h[n]
Запишем разностное уравнение. Переходная характеристика.
Y ( z)
z
1
,
1
X ( z) z 1 1 z
(1 –
z-1
h[n] = h[n – 1] + 1[n].
3
Решим методом шагов.
2
)Y(z) = X(z),
Y(z) = z-1Y(z) + X(z),
y[n] = y[n – 1] + x[n]
4
n
0
1
2
3
4
h[n]
1
2
3
4
5
1
n
0
1
2
3
4
Дискретная модель полностью цифровой САР была получена в предыдущей лекции и
в части, касающейся цифровых кодов N[n], имеет вид:
Nx[n]
Kцф(z)
Ny[n]
ηокр[n]
z-1
Цифровой фильтр содержит два интегратора, примем его передаточную функцию в
следующем виде:
b z2 b z
Kцф ( z )
2
( z 1)
1
2
5.
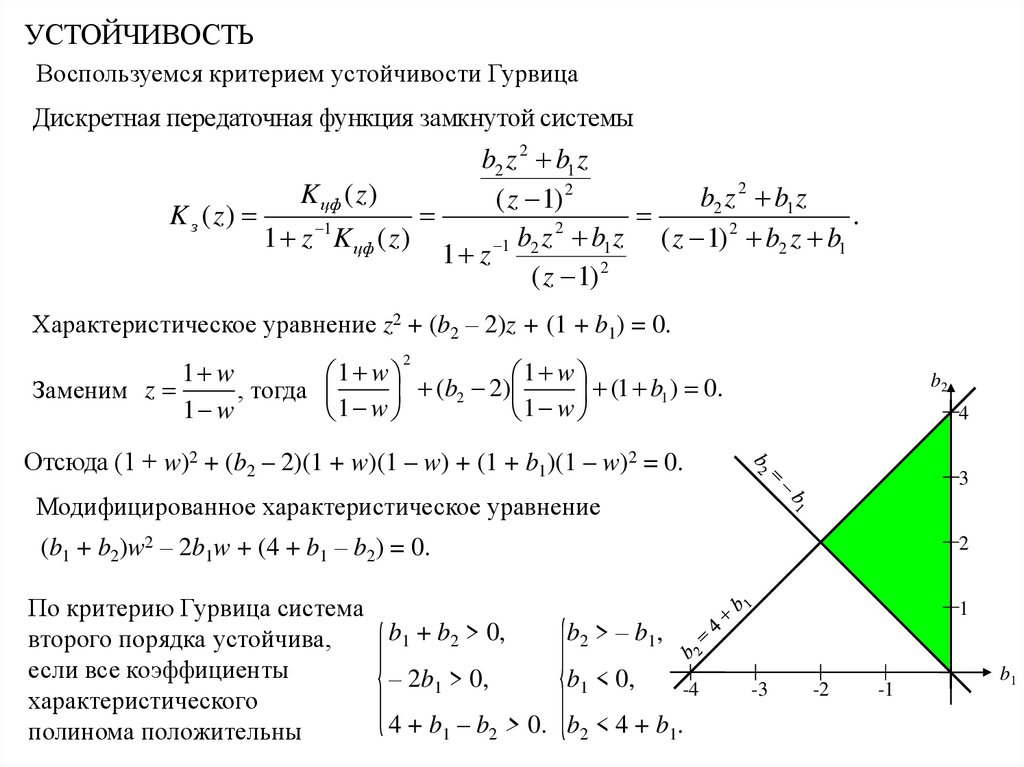
УСТОЙЧИВОСТЬВоспользуемся критерием устойчивости Гурвица
Дискретная передаточная функция замкнутой системы
b2 z 2 b1 z
K цф ( z )
b2 z 2 b1 z
( z 1) 2
K з ( z)
.
2
1
2
b z b1 z ( z 1) b2 z b1
1 z K цф ( z )
1 z 1 2
( z 1) 2
Характеристическое уравнение z2 + (b2 – 2)z + (1 + b1) = 0.
2
1 w
1 w
1 w
(
b
2
)
z
Заменим
, тогда
(1 b1 ) 0.
2
1 w
1 w
1 w
b2
4
Отсюда (1 + w)2 + (b2 – 2)(1 + w)(1 – w) + (1 + b1)(1 – w)2 = 0.
3
Модифицированное характеристическое уравнение
(b1 + b2)w2 – 2b1w + (4 + b1 – b2) = 0.
По критерию Гурвица система
b1 + b2 > 0,
b2 > – b1,
второго порядка устойчива,
если все коэффициенты
– 2b1 > 0,
b1 < 0,
-4
характеристического
4 + b1 – b2 > 0. b2 < 4 + b1.
полинома положительны
2
1
-3
-2
-1
b1
6.
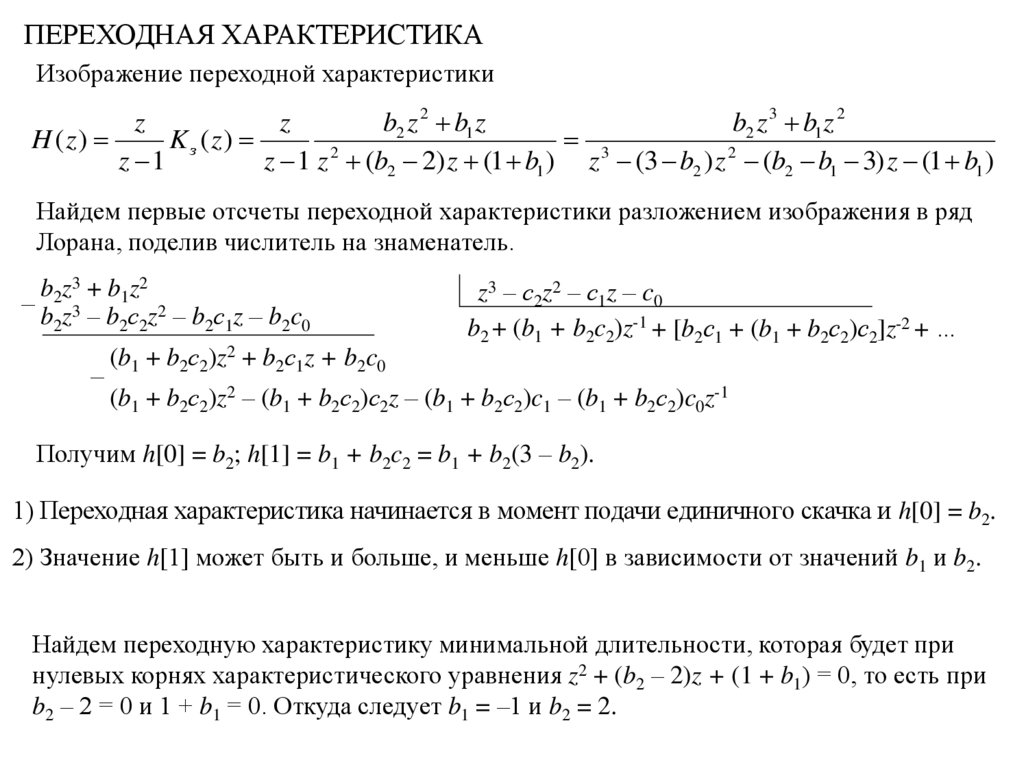
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКАИзображение переходной характеристики
z
z
b2 z 2 b1 z
b2 z 3 b1 z 2
H ( z)
K з ( z)
3
2
z 1
z 1 z (b2 2) z (1 b1 ) z (3 b2 ) z 2 (b2 b1 3) z (1 b1 )
Найдем первые отсчеты переходной характеристики разложением изображения в ряд
Лорана, поделив числитель на знаменатель.
b2z3 + b1z2
– 3
b2z – b2с2z2 – b2с1z – b2c0
–
(b1 + b2с2)z2 + b2с1z + b2c0
z3 – с2z2 – с1z – c0
b2 + (b1 + b2c2)z-1 + [b2с1 + (b1 + b2с2)с2]z-2 + …
(b1 + b2с2)z2 – (b1 + b2с2)с2z – (b1 + b2с2)c1 – (b1 + b2с2)c0z-1
Получим h[0] = b2; h[1] = b1 + b2c2 = b1 + b2(3 – b2).
1) Переходная характеристика начинается в момент подачи единичного скачка и h[0] = b2.
2) Значение h[1] может быть и больше, и меньше h[0] в зависимости от значений b1 и b2.
Найдем переходную характеристику минимальной длительности, которая будет при
нулевых корнях характеристического уравнения z2 + (b2 – 2)z + (1 + b1) = 0, то есть при
b2 – 2 = 0 и 1 + b1 = 0. Откуда следует b1 = –1 и b2 = 2.
7.
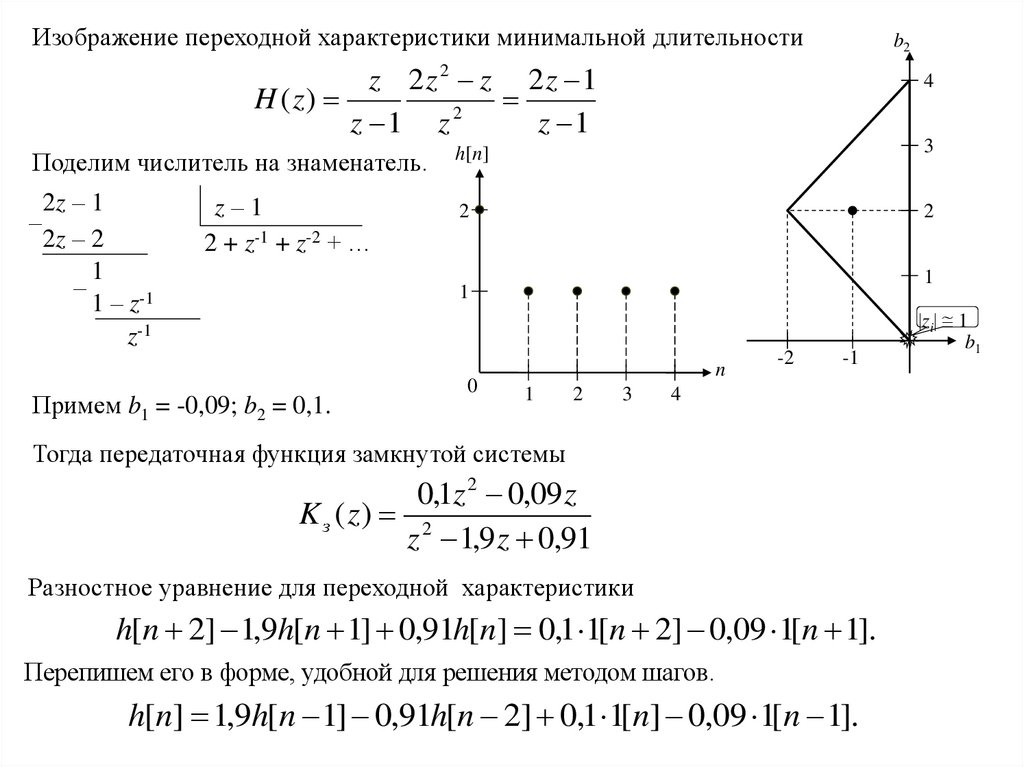
Изображение переходной характеристики минимальной длительностиb2
z 2z 2 z 2z 1
H ( z)
2
z 1 z
z 1
Поделим числитель на знаменатель.
–
2z – 1
2z – 2
1
–
1 – z-1
z-1
z–1
2 + z-1 + z-2 + …
4
h[n]
3
2
2
1
1
Примем b1 = -0,09; b2 = 0,1.
0
n
1
2
3
-2
-1
4
Тогда передаточная функция замкнутой системы
0,1z 2 0,09 z
K з ( z) 2
z 1,9 z 0,91
Разностное уравнение для переходной характеристики
h[n 2] 1,9h[n 1] 0,91h[n] 0,1 1[n 2] 0,09 1[n 1].
Перепишем его в форме, удобной для решения методом шагов.
h[n] 1,9h[n 1] 0,91h[n 2] 0,1 1[n] 0,09 1[n 1].
zi 1
b1
8.
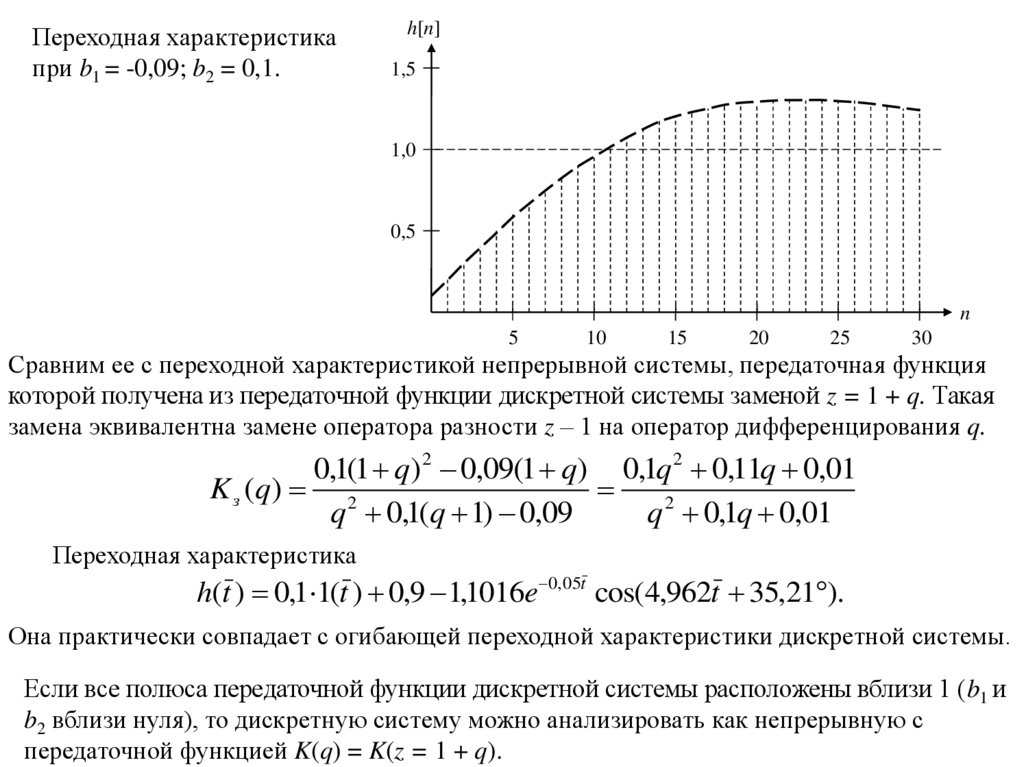
Переходная характеристикапри b1 = -0,09; b2 = 0,1.
h[n]
1,5
1,0
0,5
n
5
10
15
20
25
30
Сравним ее с переходной характеристикой непрерывной системы, передаточная функция
которой получена из передаточной функции дискретной системы заменой z = 1 + q. Такая
замена эквивалентна замене оператора разности z – 1 на оператор дифференцирования q.
0,1(1 q) 2 0,09(1 q) 0,1q 2 0,11q 0,01
K з (q) 2
q 0,1(q 1) 0,09
q 2 0,1q 0,01
Переходная характеристика
h(t ) 0,1 1(t ) 0,9 1,1016e 0,05t cos(4,962t 35,21 ).
Она практически совпадает с огибающей переходной характеристики дискретной системы.
Если все полюса передаточной функции дискретной системы расположены вблизи 1 (b1 и
b2 вблизи нуля), то дискретную систему можно анализировать как непрерывную с
передаточной функцией K(q) = K(z = 1 + q).