

 Электроника
ЭлектроникаПохожие презентации:










Электрический привод. Регулирование координат
1. ЭЛЕКТРИЧЕСКИЙ ПРИВОД
2.
Двигатели с короткозамкнутым ротором – регулирование координатСхема частотно-регулируемого электропривода, механические характеристики,
зависимость напряжения от частоты
Частотное регулирование
2 f 1
p
U1
U
1
4 ,44 f 1w1k об
f1
0
U 1 U 1н
const
f1
f1н
2
3
U
1
Mк
( 2 0 X к )
3.
Оценка частотного регулирования скорости:1. Регулирование двухзонное – вниз U 1 const и вверх (U1=U1н, f1>f1н) от основной
f1
скорости;
2. Диапазон регулирования в разомкнутой структуре (8-10):1. Стабильность скорости –
высокая;
3. Регулирование плавное;
4. Допустимая нагрузка – М=Мн при регулировании вниз от основной скорости (Ф
const), Р = Рн при регулировании вверх (Ф < Фн);
5. Способ экономичен в эксплуатации – нет дополнительных элементов, рассеивающих
энергию. Гибкость управления координатами в замкнутых структурах.
6. Способ требует использования преобразователя частоты (ПЧ) – устройства,
управляющего частотой и амплитудой выходного напряжения.
4.
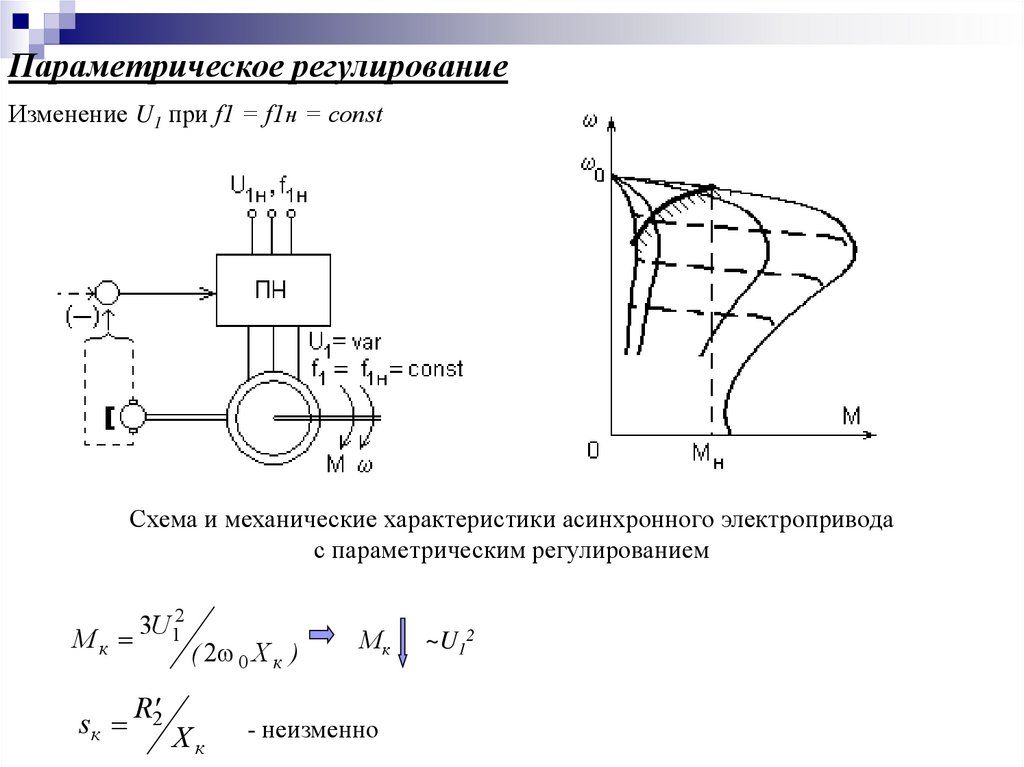
Параметрическое регулированиеИзменение U1 при f1 = f1н = const
Схема и механические характеристики асинхронного электропривода
с параметрическим регулированием
2
3
U
1
Mк
sк
R2
( 2 0 X к )
Xк
Мк
- неизменно
~U12
5.
Оценка способа регулирования:1. Регулирование однозонное – вниз от основной скорости;
2. Диапазон регулирования в замкнутой структуре (3-4):1; стабильность скорости
удовлетворительная;
3. Плавность высокая;
4. Допустимая нагрузка резко снижается с уменьшением скорости, поскольку магнитный
поток Ф U1 при f1 = const.
P2н M н 0 s н
Допустимые потери в роторной цепи
Допустимые потери при регулировании Рдоп = Мдоп 0s
M до п
M н sн
s
т.е. даже для специального двигателя с повышенным скольжением (очевидно невыгодного)
sн = 0,06 вместо стандартного sн = 0,03 снижение скорости всего на 20% (s = 0,2) потребует
снижения момента в 3 раза.
5. Способ регулирования неэффективен для использования в продолжительном режиме.
Даже для самой благоприятной нагрузке – вентиляторной необходимо двух-трехкратное
завышение установленной мощности двигателя с повышенным скольжением, интенсивный
внешний обдув;
6. Преобразователь напряжения ПН – простое устройство в 3-4 более дешевое, чем
преобразователь частоты.
6.
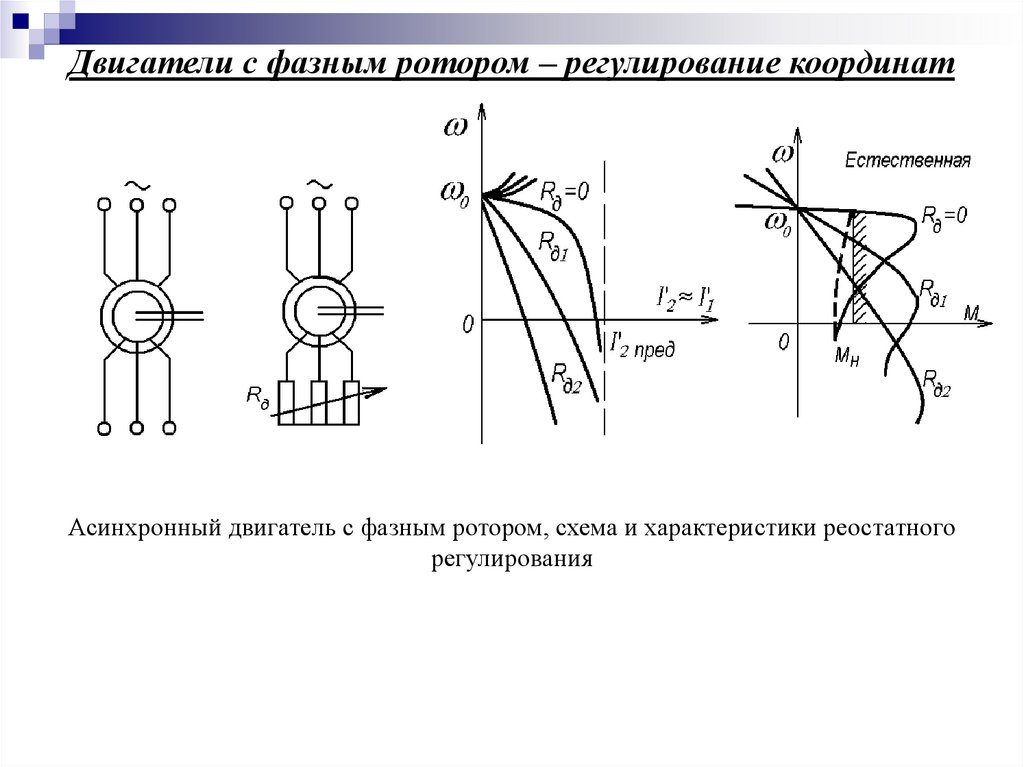
Двигатели с фазным ротором – регулирование координатАсинхронный двигатель с фазным ротором, схема и характеристики реостатного
регулирования
7.
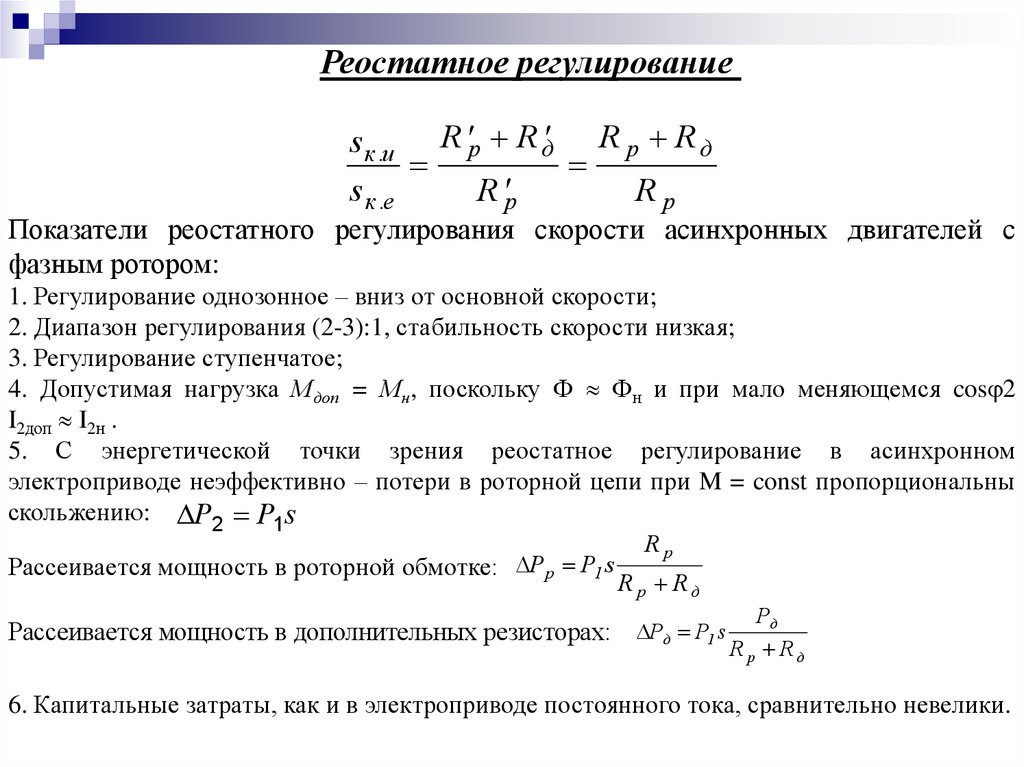
Реостатное регулированиеs к .и R р R д R р R д
s к .е
R р
Rр
Показатели реостатного регулирования скорости асинхронных двигателей с
фазным ротором:
1. Регулирование однозонное – вниз от основной скорости;
2. Диапазон регулирования (2-3):1, стабильность скорости низкая;
3. Регулирование ступенчатое;
4. Допустимая нагрузка Мдоп = Мн, поскольку Ф Фн и при мало меняющемся cos 2
I2доп I2н .
5. С энергетической точки зрения реостатное регулирование в асинхронном
электроприводе неэффективно – потери в роторной цепи при M = const пропорциональны
скольжению: P2 P1s
Рассеивается мощность в роторной обмотке: Pр P1 s
Rр
R р Rд
Рассеивается мощность в дополнительных резисторах: Pд P1 s
Pд
R р Rд
6. Капитальные затраты, как и в электроприводе постоянного тока, сравнительно невелики.
8.
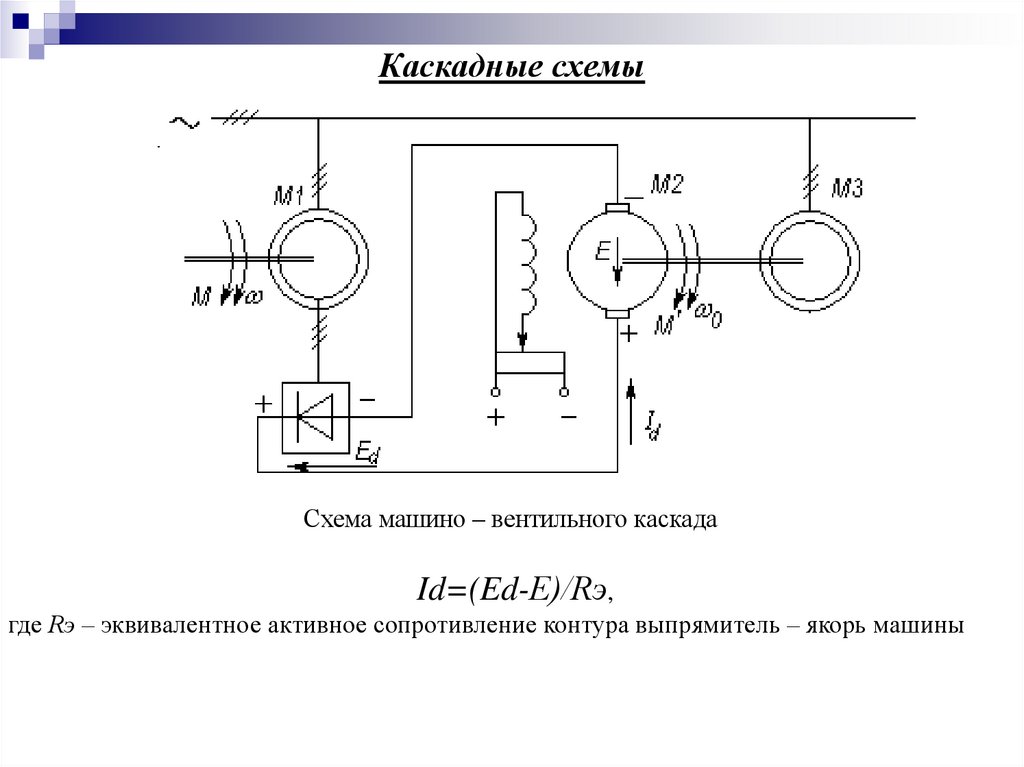
Каскадные схемыСхема машино – вентильного каскада
Id=(Ed-E)/Rэ,
где Rэ – эквивалентное активное сопротивление контура выпрямитель – якорь машины
9.
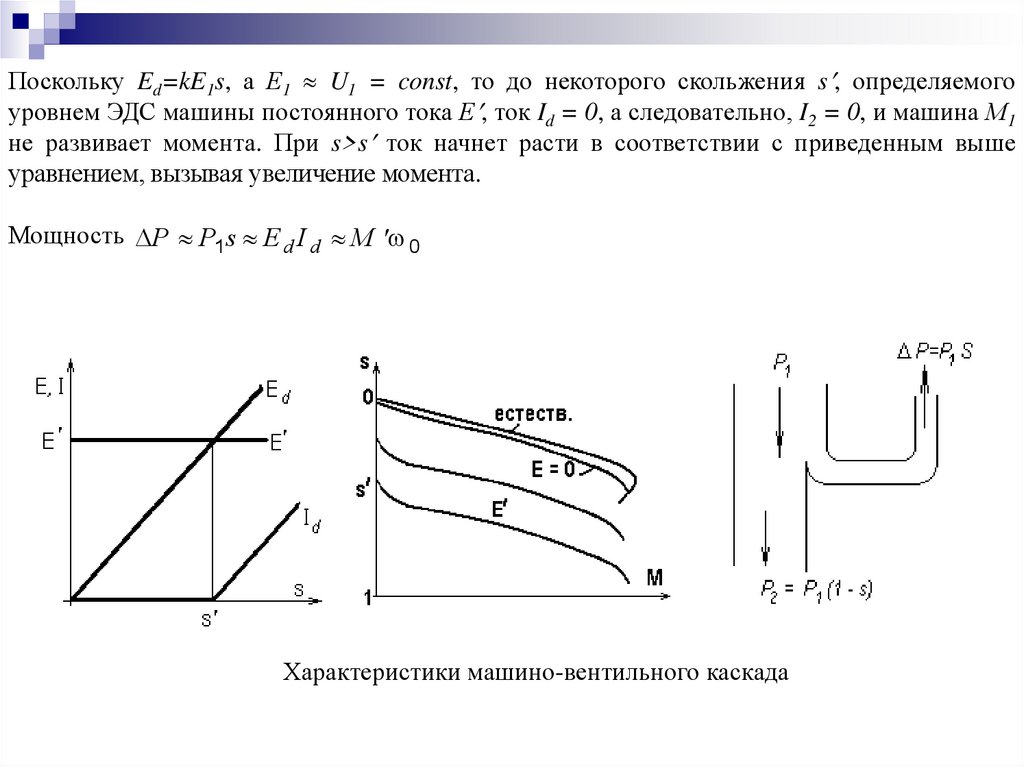
Поскольку Ed=kE1s, а Е1 U1 = const, то до некоторого скольжения s , определяемогоуровнем ЭДС машины постоянного тока Е , ток Id = 0, а следовательно, I2 = 0, и машина М1
не развивает момента. При s>s ток начнет расти в соответствии с приведенным выше
уравнением, вызывая увеличение момента.
Мощность P P1s E d I d M 0
Характеристики машино-вентильного каскада