














")


")













































 Электроника
ЭлектроникаПохожие презентации:










Частотно-керовані електроприводи змінного струму
1.
Сучасні частотно-керованіелектроприводи змінного струму
Місюренко В.О.-НУ «Львівська Політехніка
e-mail: vmissur@polynet.lviv.ua
2.
ЗмістОснови теорії частотного керування
асинхронними електроприводами
• Принцип роботи асинхронного двигуна, основні співвідношення
• Закони частотного керування: поняття, визначення
особливості та характеристики
Принцип роботи перетворювачів частоти
• Принцип формування вихідної напруги: амплітудна та
широтно-імпульсна модуляція
• Способи формування гальмівного режиму роботи двигуна
• Особливості роботи вхідного випрямляча
Електроприводи ALTIVAR від SE
• Принцип роботи, основні характеристики та функціональні
можливості,
• Проблема ЕМС
• Проблема захисту та координації комутаційної апаратури
3.
Основи теорії частотного керуванняасинхронними електроприводами
•Принцип роботи асинхронного двигуна,
•основні співвідношення
•Закони частотного керування:
Скалярне керування, поняття, закони U/f , IR- компенсація
Векторне керування, принцип, особливості
Закон збереження енергії
• Приклади структурних схем САК
4.
КОНСТРУКЦІЯ АСИНХРОННИХДВИГУНІВ
5.
ПРИНЦИП РОБОТИ АСИНХРОННОГОДВИГУНА
A
iA=Imsin t
120º
240º
Створення магнітного
поля
(3 катушки)
iB=Imsin( t-120º)
C
iC=Imsin( t-240º)
B
6.
ПРИНЦИП РОБОТИ АСИНХРОННОГОДВИГУНА
Формування момента
Струми у
статорі
Магнітне
поле статора
Струми у
роторі
Рушійний
момент
Момент: M=cФ2I1
Магнітне
поле ротора
7.
МЕХАНІЧНА ХАРАКТЕРИСТИКА АД2M k
M
;
s sk
sk s
0
s
;
Mk
sk
r12 xk2
2 1 r1 r12 xk2
;
Рекуперативний
режим
0
0
0 1 p;
r2
3 pU12
(1-sk) 0
;
xk x1 x2 ;
1 2 f1;
Режим двигуна
Гілка стійкої
роботи
Ділянка
нестійкого
режиму
роботи
Mп
Mk
M
Режим противмикання
8.
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯКоли xk r1
3 pU12 3 pU12
3 pU12
U1
Mk
2
const для
const ;
2
2
2 1 xk 2 Lk 1 8 Lk f1
f1
U1
Вольт-частотна характеристика
Uн
Mk
Застосування:
•Потужні АД з моментом
навантаження , яке не
залежить від швидкості;
• приводи з невисокими
вимогами до точності
U1
fн
fmax f1
9.
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ2
4
Для турбомеханізмів M c c 2 c 2 f12
p
3 2
3 2
Mk
3 p U1
3 p U1
U1
2
const для 2 const ;
2
2
2
4
4
M c 8 Lk f1 4 сf1
32 Lk сf1
f
Застосування:
U1
• вентилятори;
Uн
• насоси;
Mk
• компресори
U1
fн
fmax f1
10.
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯДля механизмів з важким пуском
U1
Застосування:
Uн
• конвейори
Mk
• млини, тощо
U1
fн
fmax f1
11.
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯIR-компенсація
Застосування:
двигуни малої потужності
f1=50 Гц
U1
Uн
IR-компенсація
f1=25 Гц
f1=12 Гц
U1/f1=const
M
fн
fmax f1
12.
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯВЧХ користувача
U1
6
Uн
7
5
4
1
2
3
fн
Застосування:
fmax f1
• реализація особливих умов та вимог до вольтчастотної характеристики
13.
СКАЛЯРНЕ КЕРУВАННЯРегулювання напруги (струму) та частоти
U m*
*
p
2
В
КВ
f*
АІН
M
АІН з амплітудною модуляцією
U m*
*
АІН
ФП
p
2
f*
u * U m* sin 2 f *t
M
АІН з широтно-імпульсною
модуляцією
Недоліки:
• низька швидкодія;
• відносно малий діапазон регулювання D=10-20
14.
Векторне керування, принцип, особливостіM k Im 1 I1
L12
M k
2 I 1q
L2
.
I d1
T2
d 2
2
dt
L12
L2 M
I q2
kL12 2
15. Векторне керування, режими АД
16.
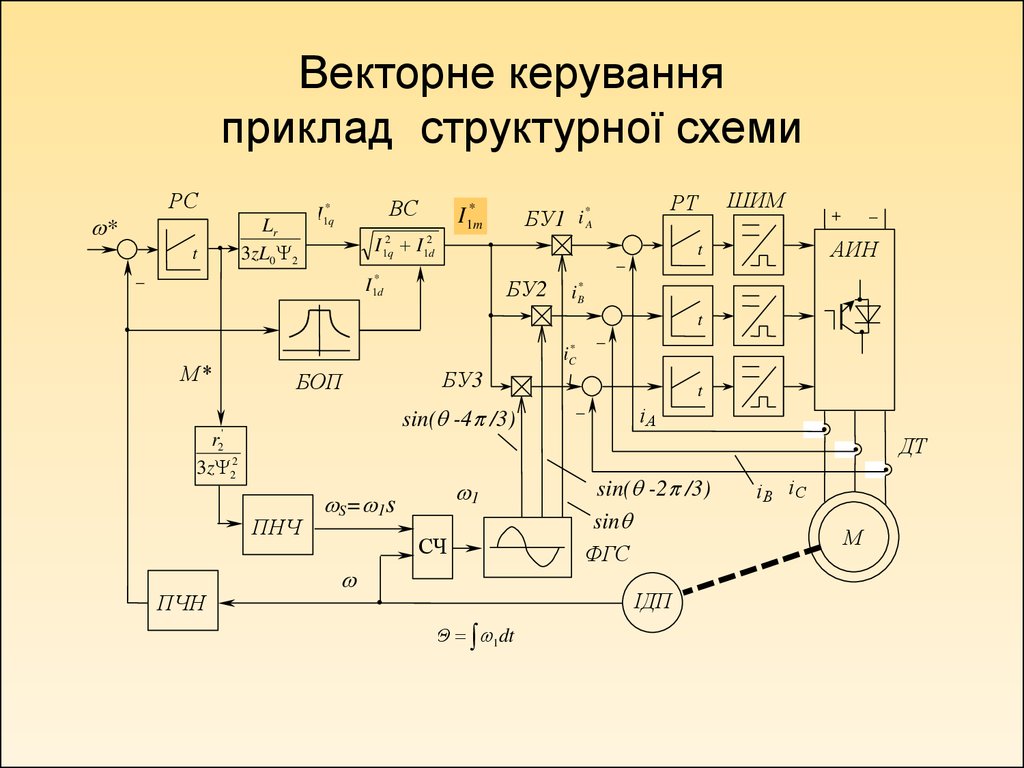
Векторне керуванняприклад структурної схеми
РС
*
Lr
3 zL0 2
t
ВС
I1q*
* *
I1m
I1m
РТ
*
БУ1 i A
I12q I12d
_
БУ2
_
+
АИН
t
_
I1d*
ШИМ
i B*
t
М*
БОП
БУ3
sin( -4 /3)
'
2
r
3z 22
iC*
t
_
іА
ДТ
ПНЧ
ПЧН
_
1
S= 1s
СЧ
СЧ
Θ 1dt
sin( -2 /3)
sin
ФГС
ІДП
іВ і С
М
17. Векторне керування
18. Векторне керування функціональна схема САК (FVC)
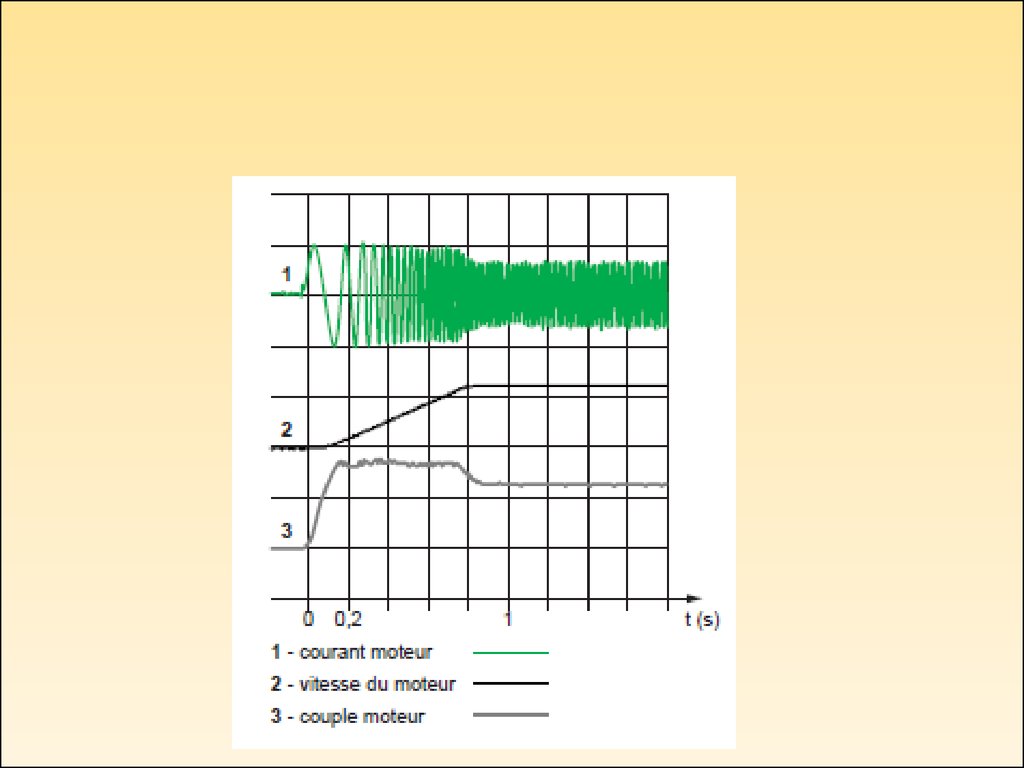
19. Векторне керування осцилограми пуску приводу з ПЧ типу ATV58F
20.
БЕЗДАВАЧЕВЕ ВЕКТОРНЕКЕРУВАННЯ
(Sensorless vector control, SVC)
Передумови:
• трудність вимірювання магнітного потоку
•Не завжди є можливість встановлення давача
швидкості (положення)
Принцип:
• вимірювання струмів з наступним розрахунком
швидкості та моменту
Переваги:
• Покращення регулювальних властивостей приводу без
застосування давачів швидкості
Недоліки:
• діапазон регулювання, точність і швидкодія гірші, ніж при
«повному» векторному керуванні. (з давачем швидкості)
21. Векторне керування без давача швидкості (SVC)
22.
23.
Принцип роботи перетворювачів частоти•Принцип формування вихідної напруги: амплітудна та
широтно-імпульсна модуляція
•Способи формування гальмівного режиму роботи двигуна
•Особливості роботи вхідного випрямляча
•Переваги ПЧ з ШІМ
•Основні вимоги до систем керування
•Функціональна та структурні схеми сучасного ПЧ типу
Altivar
24.
Общая структура преобразователейчастоты
Назначение ПЧ – преобразование энергии переменного тока
неизменных уровня и частоты в энергию переменного тока с
регулируемыми уровнем и частотой
Ud ,Id
U1=const
f1=const
+
+
В
Ф
Двухзвенный ПЧ
В – выпрямитель;
Ф – сглаживающий фильтр;
АИ – автономный инвертор
АИ
-
U2=var
f2=var
25.
Силовінапівпровідникові модулі
Особливості конструкції:
• об’єднання в модулі:
• силового керованого ключа та зворотнього діода,
• декількох ключів;
• силової схеми цілого перетворювача енергії
•Напівпровідниковий кристал та електрична схема ізольовані від основи
Переваги:
• зменшення габаритів;
• спрощення конструкції ПЧ та його вартості;
•Підвищення надійності;
• збільшення швидкодії
26.
27.
Трифазний АІНз амплітудної модуляції
Tм
+
uу1
uу2
Tм 3
2Ud 3
ua
t
ib
ub
VD2
VS3
VS4
VD3
VD4
VS5
VS6
VD5
VD6
t
I
II III IV V VI I
ub
ua
uc
ia
uc
ic
II III IV V
t
+
VS1 Za ia
Ud
-
Ud /3
+
iвх=ib
VS4
iвх=ia
Zc ic
VS5
ic
ib Za Zb Zc
Zb
2Ud /3
I
VS2
VS1
VD1
ia
Ud 3
С
iвх
uу3
uу4
uу5
uу6
–
Ud
II
VS1 Za
Ud
ib
-
Zb
VS4
Zc
2Ud /3
ic U /3
d
VS6
28.
Трехфазный АИНОсновные принципы управления
+
• для обеспечения непрерывности выходного
тока управляющие импульсы всегда
присутствуют на трех ключах (по одному в
каждой фазе);
• во избежание сквозного короткого замыкания
источника постоянного тока не могут быть
одновременно открыты оба ключа одной фазы;
• выходной ток фазы после коммутации в ней
не может измениться скачком;
• после запирания ключа отпирается обратный
диод в той же фазе, который обеспечивает
протекание фазного тока в том же
направлении, что и до запирания ключа
–
Ud
С
iвх
VS2
VS1
VD1
VD2
VS3
VS4
VD3
VD4
VS5
VS6
VD5
VD6
ua
ub
ia
ib Za Zb Zc
uc
ic
29.
Амплітудна модуляція в ПЧПереваги:
• простота алгоритму керування інвертором
• малі втрати в ключах інвертора
Недоліки:
• необхідність використання двох керованих перетворювачів;
• суттєва несинусоїдальність струмів двигуна;
• вузький діапазон регулювання швидкості двигуна;
• низький вхідний коефіцієнт потужності , несприятловий вплив на мережу живлення
30.
Трехфазный АИН с широтноимпульсной модуляциейUd /3 (2/3)Ud
iA
uA
н
t
UA
uB
t
iB
UB
uC
t
iC
UC
uСА
Ud
iвх
t
31.
Широтно-импульсная модуляция вПЧ
Преимущества:
• входной выпрямитель может быть неуправляемым;
• практически синусоидальная форма выходного тока;
• возможность глубокого регулирования скорости;
• Cos близкий к 1;
• возможность питания нескольких АИН от общего выпрямителя
Недостатки:
• необходимость применения более дорогих ключей;
• повышенные потери в ключах вследствие высокой частоты их переключения;
• повышенное излучение электромагнитных помех;
• возможность перенапряжений на обмотке двигателя при большой длине кабеля
Области применения:
• электроприводы с повышенными требованиями к точности, диапазону регулирования
скорости или энергетическим показателям;
• силовые активные фильтры для систем электроснабжения;
• источники бесперебойного питания
32.
Способы торможения вэлектроприводах с ПЧ
Рекуперативное с возвратом энергии в сеть:
івх <0
• энергосбережение;
• дополнительные капитальные затраты
АИН
_
M
+
С ведомым сетью
инвертором (ВИ):
• несинусоидальная форма тока сети;
• cos <1
ВИ
УВ
івх >0
АВ
I
Id
АИН
С активным
выпрямителем (АВ)
L
Ud
E
U
+
_
M
• синусоидальная форма
тока сети;
• cos =1
33.
Способы торможения вэлектроприводах с ПЧ
В
АИН
iвх>0
Rт
_
iр
VS0
+
iвх <0
Динамическое торможение
(торможение постоянным током)
• тормозная энергия рассеивается в двигателе;
+
• дополнительные капитальные затраты
отсутствуют
VT1
_
Ud
VT4
_
• тормозная энергия рассеивается в
резисторе;
• дополнительные капитальные затраты
невелики
АИН
Id
Iт
M
Рекуперативное
с разрядным резистором:
i
M
Iт +
t1
t2
T
VD2
VT4
VT1
VD2
u
Ud
t
34.
Способы торможения вэлектроприводах с ПЧ
Выпрямитель
_
Обмен тормозной энергией
по сети постоянного тока:
+
Инвертор
Инвертор
Инвертор
M1
M2
M3
• рекуперируемая энергия может быть использована
другими потребителями;
• мощность выпрямителя меньше суммы мощностей
инверторов;
• целесообразно использование в
многодвигательных механизмах
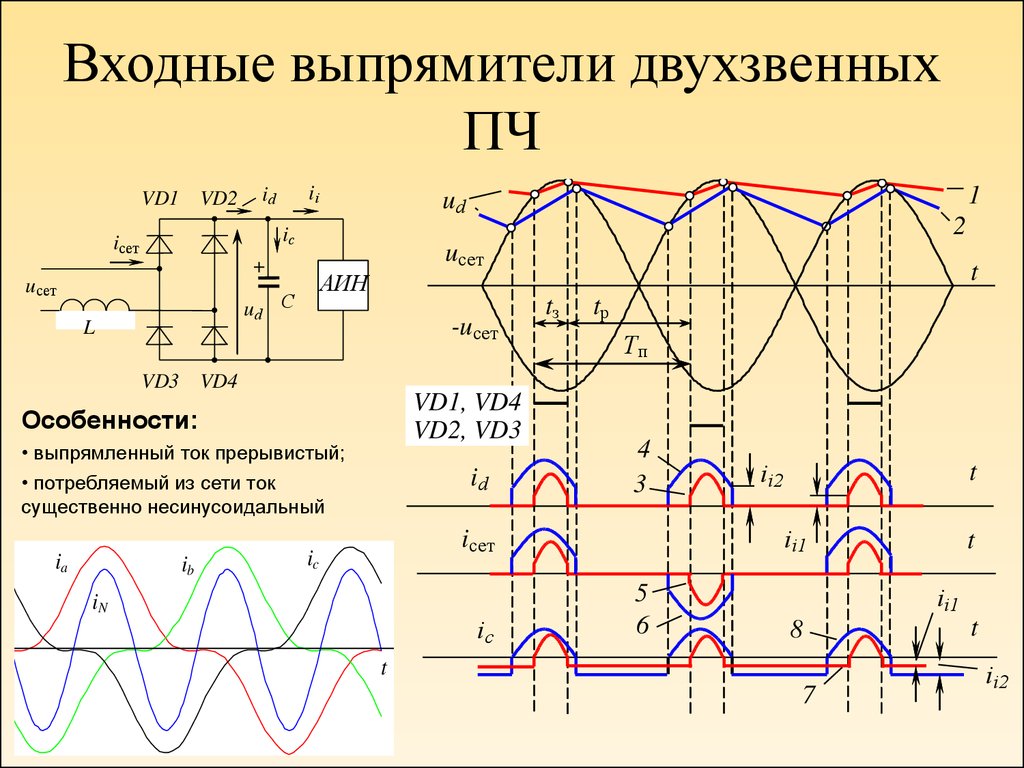
35.
Входные выпрямители двухзвенныхПЧ
VD1
VD2
ii
id
ic
iсет
VD3
-uсет
tз
tр
Тп
VD4
VD1, VD4
VD2, VD3
Особенности:
• выпрямленный ток прерывистый;
• потребляемый из сети ток
существенно несинусоидальный
ia
t
АИН
ud С
L
2
uсет
+
uсет
1
ud
ib
id
4
3
iN
іс
t
іі1
iсет
ic
іі2
5
6
t
іі1
8
t
7
t
іі2
36.
Ограничение зарядного токаVD1
VD2
VD3
L1
R1
R
L2
iз
а
R2
б
Цель:
• снижение тока заряда конденсатора при первом подключении ПЧ сети
iз
в
37.
Перенапряжения на выходе АИНUd
к АИН
к двигателю
к кабелю
к кабелю
UАИН
t
UАД
а
t
б
к АИН
в
Выходные фильтры
г
Причины:
• быстрый темп изменения выходного напряжения АИН при переключениях ключей;
• проявление волновых свойств длинного кабеля
Следствия:
• перенапряжения на обмотке статора двигателя (до двойного по сравнению с номинальным
напряжением);
• рост емкостных токов утечки в кабеле;
• более интенсивное электромагнитное излучение кабеля
38.
ТРЕБОВАНИЯ К ПЧрегулирование (как согласованное, так и раздельное) частоты и уровня выходного
напряжения в широких границах;
форма выходного тока, максимально приближенная к синусоидальной;
способность к кратковременным перегрузкам;
создание условий для протекания тормозных токов двигателя;
минимальное внутреннее сопротивление для обеспечения максимальной жесткости
механических характеристик електропривода;
высокое быстродействие;
легкость интеграции в системы автоматизации высшего уровня;
высокие КПД и коэффициент мощности;
высокая надежность;
удобство и безопасность наладки и эксплуатации;
минимальные генерируемые электромагнитные помехи и акустический шум;
минимальные габариты и масса;
уровень защиты от влияния окружающей среды, соответствующий условиям
эксплуатации;
возможность выбора комплектации в зависимости от решаемых задач и условий
эксплуатации
39.
ЗАДАЧИ СИСТЕМ УПРАВЛЕНИЯСОВРЕМЕННЫХ ПЧ
•формирование логических сигналов управления ключами (т.е.
управление самим ПЧ);
•управление координатами електропривода (током, скоростью);
•управление технологическим параметром (положением рабочих
органов, давлением, натяжением, производительностью и т.п.);
•диагностирование и защита узлов и элементов преобразователя и
электропривода в целом;
•программирование и настройка ПЧ и системы управления
электроприводом;
•обеспечение диалога с пользователем и системой автоматизации
высшего уровня.
40.
РАЗВИТИЕ ПЧ200
200
150
125
%
100
100
14
5
110
88
77
48
50
Размер
20
Стоимость
25
5
0
Количество
функций
1979
1987
1996
2002
12
5
2005
41.
Структурна схема електроприводу ATV71Силовая
секция
Карта
контроля
Унифицир. блок управления
Послед
интерфейс
Карта
расширения 1
Карта
расширения 2
Контроллер
прикладных
задач
Интегрир
терминал
Изоляция
Скоростной послед
порт
Контроллер
управления
двигателем
энкодер
опц. карта 3
Порт 1 : MBS
RJ45 (терминал)
Графический
терминал
Порт 2 : RJ45
Modbus
CanOpen
42.
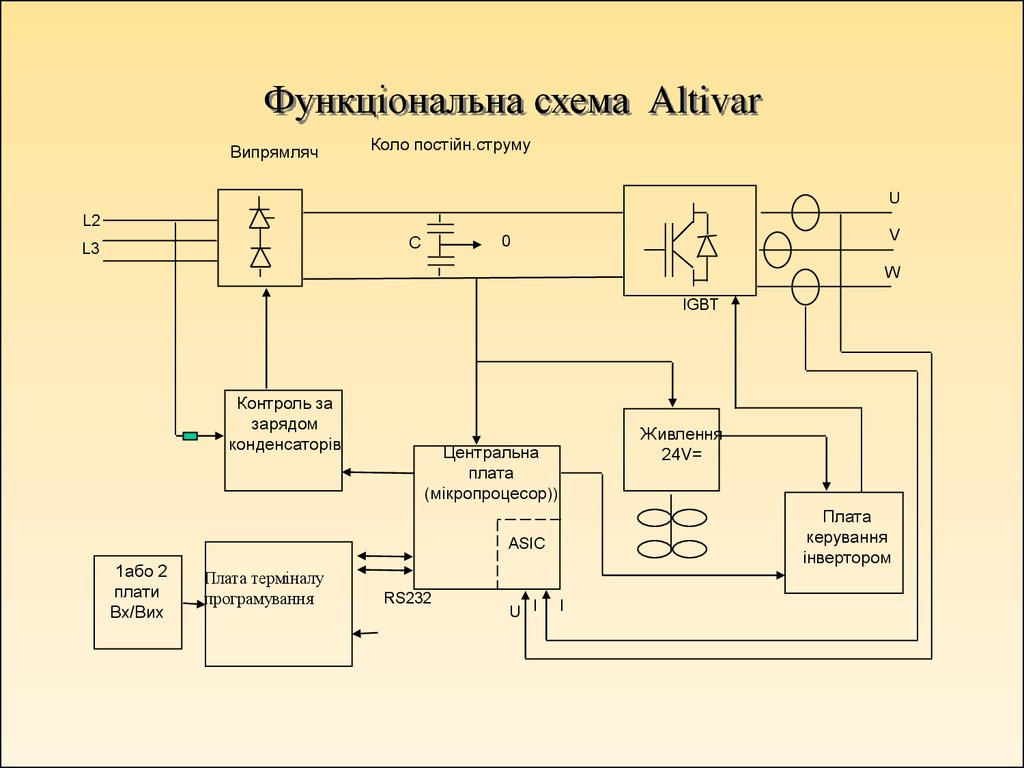
Функціональна схема AltivarВипрямляч
Коло постійн.струму
U
L2
V
0
C
L3
W
IGBT
Контроль за
зарядом
конденсаторів
Живлення
24V=
Центральна
плата
(мікропроцесор))
Плата
керування
інвертором
ASIC
1або 2
плати
Вх/Вих
Плата терміналу
програмування
RS232
U I
I
43.
Електроприводи Altivar від SEПрості механізми
Складні механізми
Вентилятори, насоси
Установки кондиц. та
вентиляцыъ
ATV11
ATV31
ATV71
ATV61
ATV21
0,18- 2,2 кВт
0,18-15
кВт
0,37-500 кВт
0,37-630 кВт
0,75-30 кВт
ALTiSTART 01
ATS01
1,1-75кВт
ALTiSTART 48
ATS48
4 - 1200 кВт
44.
Оновні функціональні можливостіелектроприводів Altivar
Формування статичних та динамічних
характеристик електроприводу( механізму)
Формування команд та режимів роботи
адаптованих до конкретного механізму
Організація діалогу з оператором та/або АСУ ТП
Моніторинг стану (діагностика) та захист системи
45.
Формування команд та режимів роботиадаптованих до конкретного механізму
46.
47.
48.
49.
50.
51.
52.
Три рішення для створенняпроблемно-орієнтованих
електроприводів:
•Застосування макро-конфігурацій (ATV71) або
спеціальних функцій (ATV31, ATV71)
•Застосування вільно програмованої
плати(ATV71) або спеціальних прикладних плат
(,ATV71,ATV61)
•Створення проблемно-орієнтованого
електропривода ( ATV61, ATV21)
53.
Застосування макро-конфігурацій( ATV71)
•Пуск/стоп (заводське налаштування)
•Транспортування
•Загальне застосування
•Підйомно-транспортні механізми
•ПІД-регулятор
•Комунікація
•Ведучий/ведений
54.
Проблемно-орієнтованийелектропривод ATV61
Орієнтований на застосування для механізмів з
вентиляторною характеристикою
ЗАБЕЗПЕЧУЄ:
- ПІД-регулювання технологічного параметра
- режим енергозбереження
- Режим підхоплення на ходу,
-адаптивне струмове обмеження у функції швидкості,
-підрахунок годин роботи та спожитої електроенергії , тощо
55.
Проблема електромагнітноїсумісності ПЧ
•Поняття про ЕМС
•Характеристика
електромагнітних завад
•Вплив ПЧ на мережу
•Вплив ПЧ на двигун
(перенапруги та градіент
dU/dt)
56.
Поняття про ЕМСЕМС –це можливість
використання пристрою
чи системи в
електромагнітному
середовищі без
створення
недопустимых для
оточення чи іншого
пристрою
57.
Вплив ПЧ на мережу58.
Спектральний склад гармонік струму59.
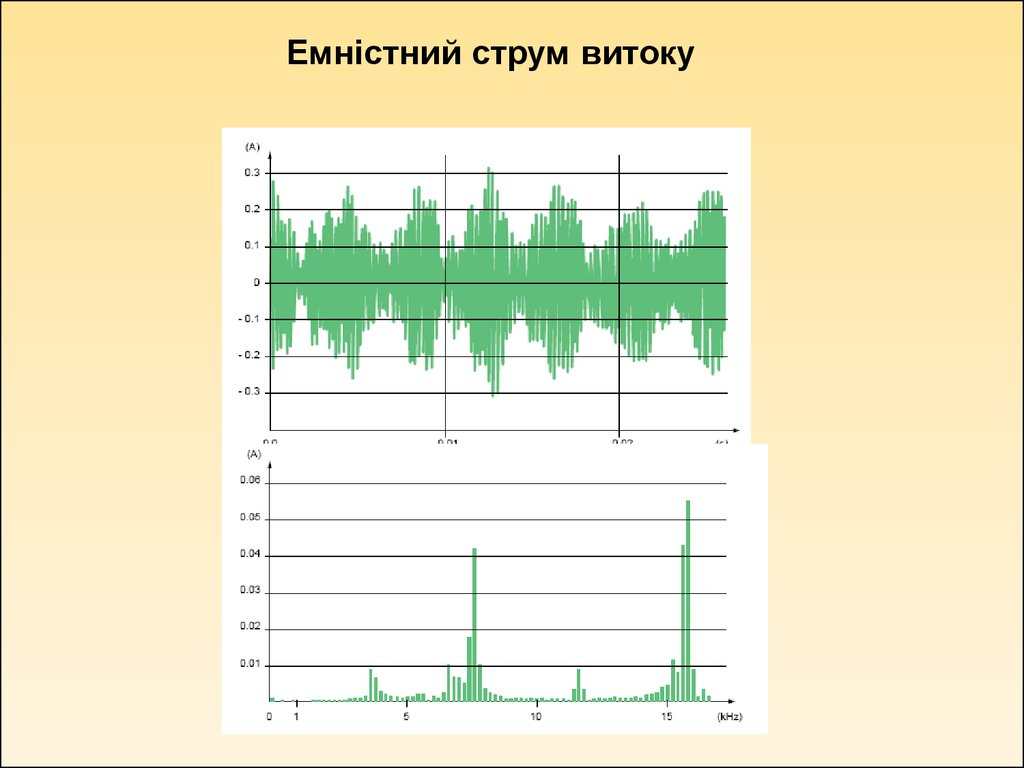
Емністний струм витоку60.
Емністний струм витоку61.
Засоби зменшення впливу ПЧ на мережуВикористання мережного дроселя
Використання дроселя постійного струму
Використання додаткового вхідного
фільтра радіочастот
62.
Вплив ПЧ на двигунПроблема градієнту dU/dt
Проблема довгого кабелю
63.
Вихідні напруга та струм ПЧ64.
Наслідки такої вихідної напруги ПЧ:Виникнення хвильових процесів у кабелі
та явища накладання падаючої та відбитої
хвилі- результат: перенапруга на обмотці
двигуна
Круті фронти імпульсів напруги (dU/dt)
викликають нерівномірний розподіл напруги
між витками обмотки двигуна
65.
Засоби для зменшення впливу ПЧна двигун
Використання дроселя двигуна
Використання вихідного фільтра
(у тому числі т.з. синусного фільтра)
Активізація у програмі ПЧ спеціальної
функції ( ATV71)
66.
Проблема захисту ПЧВиди захисту
Поняття про координацію комутаційної
апаратури
67.
Мета координаціїЗахистити
обслуговуючий персонал та установку при
виникненні будь-яких аварійних струмів
(перевантаження або струми к.з.)
Зменшити
витрати на уведення в експлуатацію після
аварії та мінімізувати час на заміну та вартість
апаратури.
68.
Координація захистуІдея координації у стандарті МЕК 947
Пріоритет захисту персоналу та обладнання
Не повинно бути ніяких проявів ззовні шафи
Ніякої небезпеки пожежі
Приймати до уваги обслуговування обладнання
Обмежити небезпеку пошкодження апаратури
силового кола
Скорочення часу простою
Неперервність стану працездатності для покращення
продуктивності
69.
МЕК 947: 3 рівня координаціїКоординація типу 1 (МЕК 947-4-1)
Координація типу 2 (МЕК 947-4-1)
Координація повна (МЕК 947- 6-2)
Координація силового кола двигуна залежить
головним чином від:
- електричного середовища
-- вибору апаратури
70.
Координація типу 1(МЕК 947-4-1)
У випадку к.з.
Ніякої небезпеки для персоналу та установки
Контактор та/або реле можуть бути пошкоджені
Перед повторним пуском потрібно замінити
апаратуру
71.
Координація типу 2МЕК 947-4-1
У випадку к.з.
Ніякої небезпеки для персоналу та обладнання.
Не допускається ніякого пошкодження апаратури.
Ризик зварювання контактів допускається. Контакти можуть
бути легко роз’єднанні за допомогою інструменту
(викруткою).
Ніяких повторних налагоджень не потрібно робити.
Електрична ізоляція повинна зберігатися після аварії. Коло
повинна бути готовим для повторного вмикання в роботу.
72.
Повна координація(МЕК 947-6-2)
У випадку к.з.
Ніякої небезпеки для персоналу та обладнанн
Ніякого пошкодження пускача (контактора), не
допускається ніякого зварювання контактів, електрична
ізоляція не повинна бути порушена
Негайний повторний пуск є можливим без інспектування
апаратури