





 Физика
ФизикаПохожие презентации:










Система сходящихся сил
1.
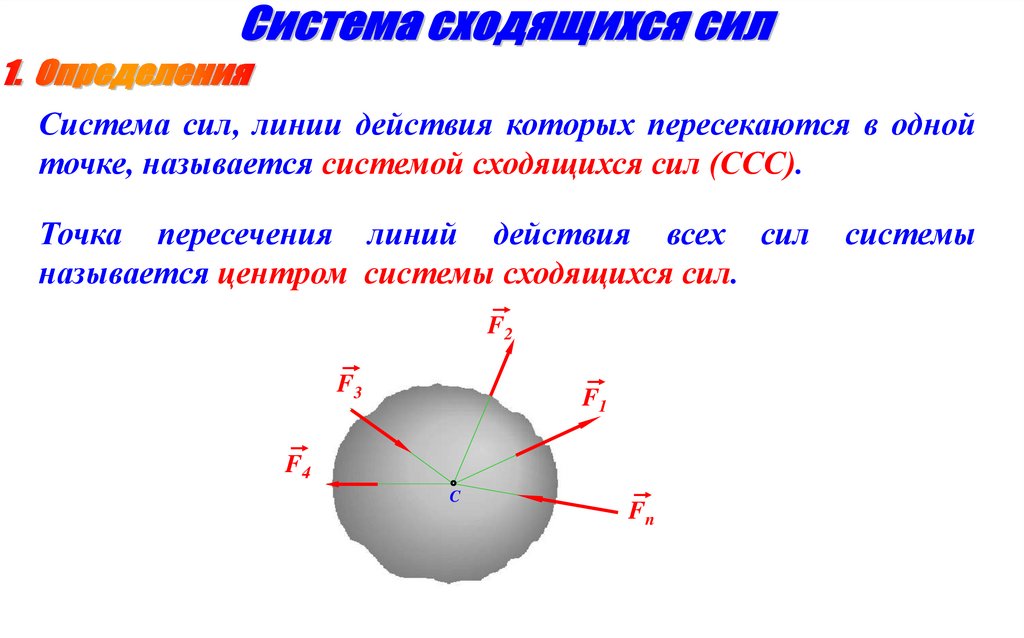
Система сил, линии действия которых пересекаются в однойточке, называется системой сходящихся сил (ССС).
Точка пересечения линий действия всех сил
называется центром системы сходящихся сил.
F2
F3
F1
F4
C
Fn
системы
2.
Система сходящихся сил всегда имеет РАВНОДЕЙСТВУЮЩУЮ.На основании 4-й аксиомы и 1-го следствия из 2-й аксиомы, приведение системы сходящихся сил
к простейшей (к одной силе – РАВНОДЕЙСТВУЮЩЕЙ) осуществляется последовательным
сложением пар векторов (формальное сложение векторов по правилу параллелограмма или
многоугольника).
F2
R1
F4
F3
Fn
F2
R3F
1
C
F4
n
главный
вектор
системы
F1 ,..., FnИсходная
Rсистема
; R сил:
F1i ,-R
F
,
F
,
F
,...,
F
R
R
Rn
32
34
12
i 1
Проекции главного
вектора
на оси координат:
F
,
F
R
n
n
1
2
1n
Rx F xi ; R y F yi ; Rz Fz i
R
,
F
R
F1R2
1
3
i 1
i2 1
i 1
2
2
2
R2 , Fвектора:
R
Модуль главного
R
R
R
R
4
3
x
y
z
F
n
F3
………
R
R
R
,
F
R
cos
; cos
Направляющие косинусы:
xn 2
R
n
Rx
.
; cos
R
R
x
3.
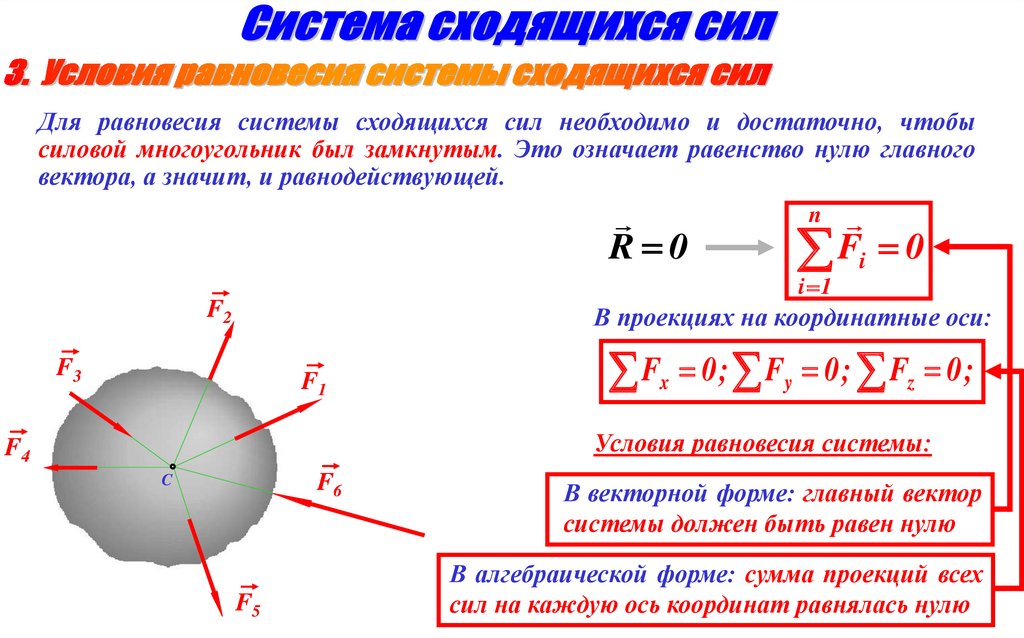
Для равновесия системы сходящихся сил необходимо и достаточно, чтобысиловой многоугольник был замкнутым. Это означает равенство нулю главного
вектора, а значит, и равнодействующей.
R 0
Fi 0
n
i 1
F2
В проекциях на координатные оси:
F3
F1
Fx 0 ; Fy 0 ; Fz 0 ;
Условия равновесия системы:
F4
F6
C
F5
В векторной форме: главный вектор
системы должен быть равен нулю
В алгебраической форме: сумма проекций всех
сил на каждую ось координат равнялась нулю
4.
Если система из трех непараллельных сил находится вравновесии, то линии их действия пересекаются в одной точке
и силы располагаются в одной плоскости.
R1 F1 , F2 ; F1 , F2 , F3 R1 , F3 .
F2
R1
F1
C
F3
Система из двух оставшихся сил R1 и F3 находится в
равновесии, т.е. эквивалентна нулю:
R1 , F3 0.
На основании аксиомы 1 только две равные по модулю,
противоположно направленные и действующие по
одной прямой силы могут образовывать систему,
эквивалентную нулю. Значит, линия действия силы
F3 проходит через точку пересечения сил F1 и F2 .
5.
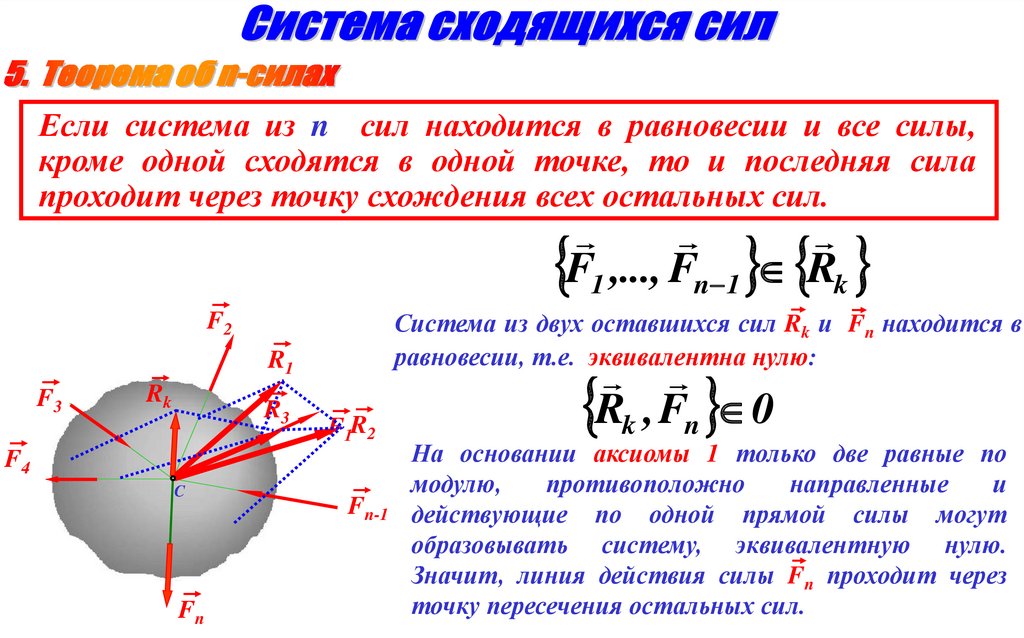
Если система из n сил находится в равновесии и все силы,кроме одной сходятся в одной точке, то и последняя сила
проходит через точку схождения всех остальных сил.
F1 ,..., Fn 1 Rk
Система из двух оставшихся сил Rk и Fn находится в
равновесии, т.е. эквивалентна нулю:
F2
R1
F3
Rk
R3
F1R2
F4
C
Fn
Fn-1
Rk , Fn 0
На основании аксиомы 1 только две равные по
модулю,
противоположно
направленные
и
действующие по одной прямой силы могут
образовывать систему, эквивалентную нулю.
Значит, линия действия силы Fn проходит через
точку пересечения остальных сил.
6.
Груз весом 1000Н подвешен к вертикальной стене на составном кронштейне и находится вравновесии. Углы, образуемые стержнями кронштейна с вертикалью – 300 (для верхнего
стержня) и 600 – (для нижнего).
Определить усилия в верхнем и нижнем стержнях.
y
Решение:
A
n
=R
:
F
0
Yi
i 1
x
n
i 1
300
R
AC
RACy
R
= -RBC 0
PxBCx
= -Pcos60
600
B
FXi 0 : ̶ Pcos600 ̶ RBC = 0 ;
AC
̶ Psin600 + RAC = 0 ;
Решение уравнений равновесия:
600
R
BC
C
R P sin 60 1000 0.866 866 H ;
0
RBC P cos 60 1000 0.500 500 H ;
Py = -Psin600
AC
0
Ответ:
P
RAC 866 H , RBC 500 H
Знак «–» показывает, что реакция
направлена
в
сторону,
противоположную показанной на
расчетной схеме.
7.
Фонарь уличного освещения весом 100Н подвешен на тросе посредине между двумявертикальными столбами, так, что величина провеса троса в точке подвеса фонаря
составляет 0.1м. Расстояние между столбами 10м.
Определить силы натяжения в ветвях троса.
А
T1
D
T2
0.1 м
10 м
B
CE BC DC 2 BD 2 0.12 5 2 5.001м
E
P
0.1 м
C
T2
Треугольники СВЕ и cbe (силовой) подобны
параллельности сторон (CB||cb, BE||be, CE||ce),
выполняются соотношения:
be
ce
cb
BE CE CB
P
e
или
P
T1
T2
;
BE CE CB
P CE 100 5.001
T1
2500.5 H ;
BE
0.5
b
c
T1
Решение:
P CB 100 5.001
T2
2500.5 H .
BE
0.5
Ответ:
T1 2500.5 H , T2 2500.5 H
по признаку
следовательно
8.
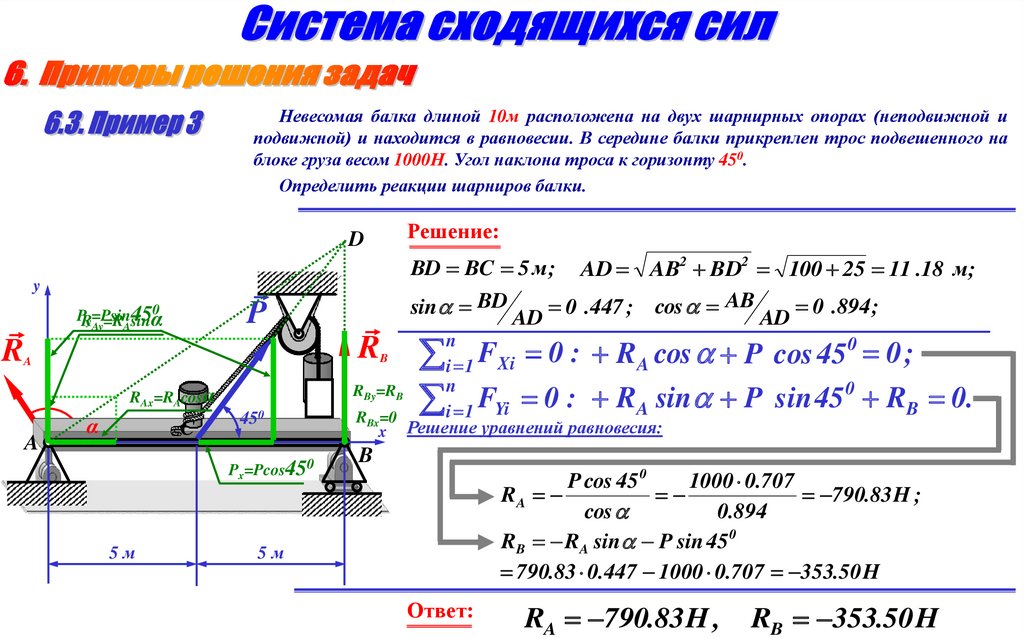
Невесомая балка длиной 10м расположена на двух шарнирных опорах (неподвижной иподвижной) и находится в равновесии. В середине балки прикреплен трос подвешенного на
блоке груза весом 1000Н. Угол наклона троса к горизонту 450.
Определить реакции шарниров балки.
D
BD BC 5 м ; AD AB2 BD2 100 25 11 .18 м;
0 .894 ;
sin BD
0 .447 ; cos AB
AD
AD
y
P
0
PRy=Psin
45
=R
sin
α
Ay
A
R
RAx=RAcosα
A
α
C
450
Px=Pcos450
5м
F 0 : R cos P cos 45 0 0 ;
0
R
sin
P sin 45 RB 0.
F 0:
n
B
A
i 1 Xi
n
RBy=RB
A
i 1 Yi
RBx=0
x Решение уравнений равновесия:
R
A
Решение:
B
P cos 45 0
1000 0.707
RA
790.83 H ;
cos
0.894
RB RA sin P sin 45 0
790.83 0.447 1000 0.707 353.50 H
5м
Ответ:
RA 790.83 H ,
RB 353.50 H
9.
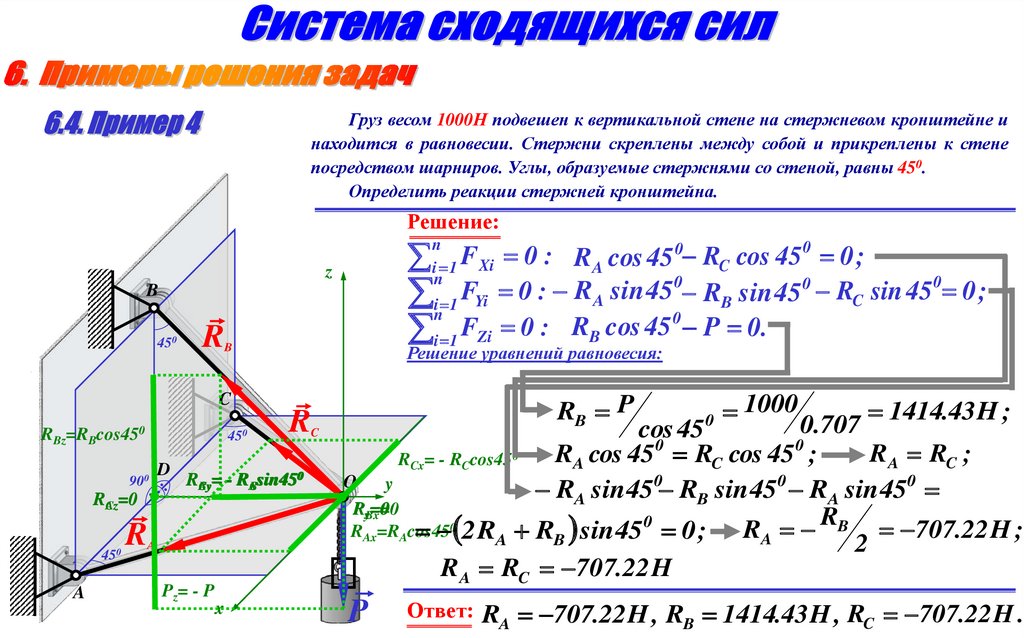
Груз весом 1000Н подвешен к вертикальной стене на стержневом кронштейне инаходится в равновесии. Стержни скреплены между собой и прикреплены к стене
посредством шарниров. Углы, образуемые стержнями со стеной, равны 450.
Определить реакции стержней кронштейна.
Решение:
0
0
F
0
:
R
cos
45
0;
RA cos 45
Xi
C
0
0
0
in 1 FYi 0 : RA sin 45 RB sin 45 RC sin 45 0 ;
0
i 1 FZi 0 : RB cos 45 P 0.
n
i 1
n
z
B
450
R
Решение уравнений равновесия:
B
C
RBz=RBcos450
450
900
RCz
Az=0
450
A
D
R
0
RCy
Ay= - RA
C
By
Bsin45
R
A
Pz= - P
x
C
RB P
0
1000
1414.43 H ;
0.707
cos 45
0
0
0
RA RC ;
RA cos 45 RC cos 45 ;
RCx= - RCcos45
O
y
RA sin 450 RB sin 450 RA sin 450
P
RxyBx
=0
=0
RB
0
0
RAx=RAcos45
R
707.22 H ;
2 RA RB sin 45 0 ;
A
2
RA RC 707.22 H
P
Ответ: R 707.22 H , R 1414.43 H , R 707.22 H .
C
A
B
10.
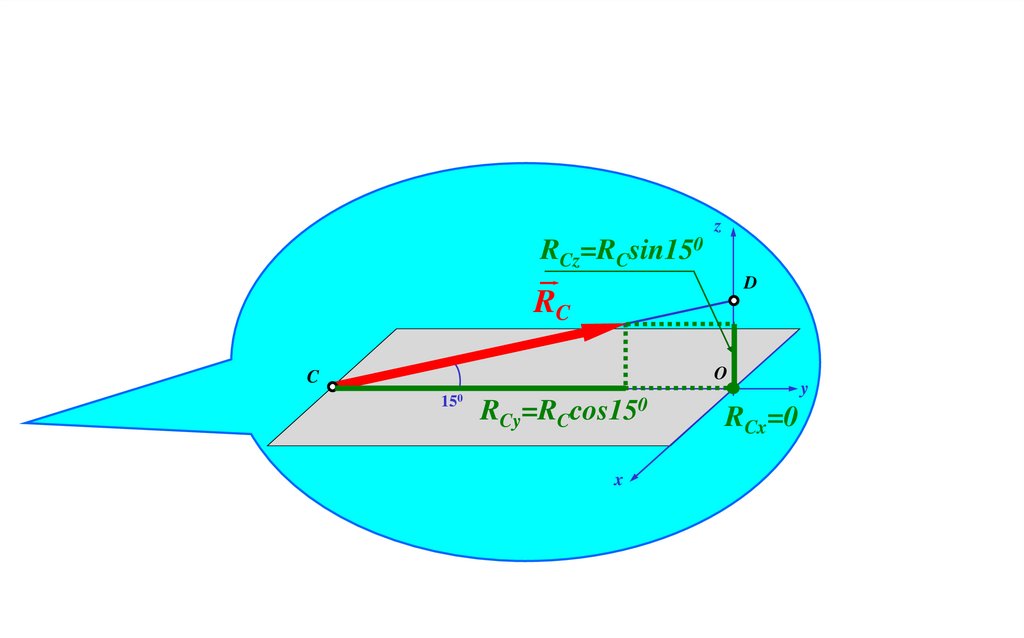
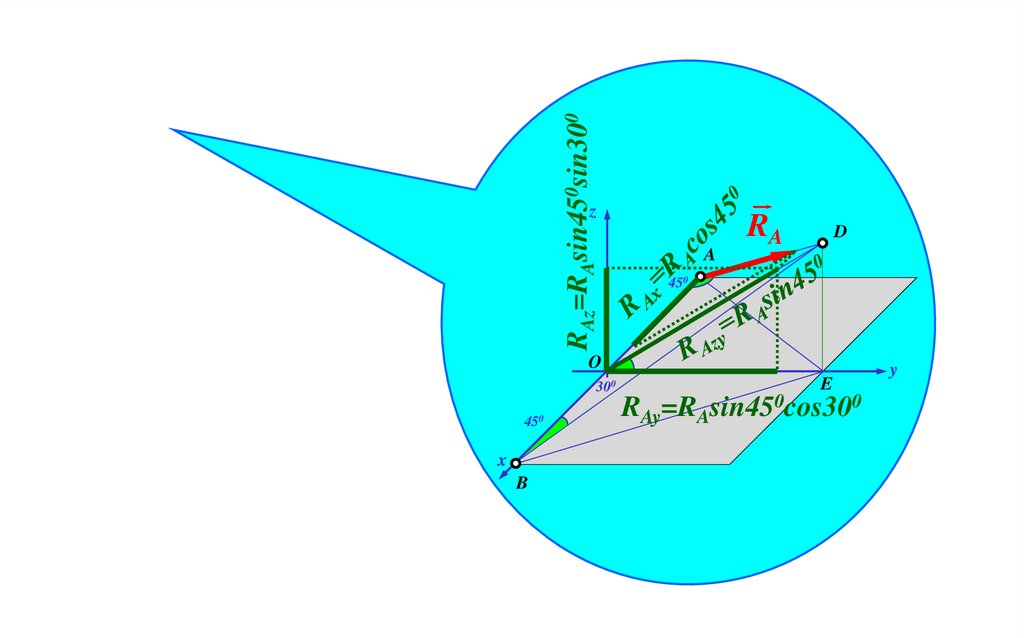
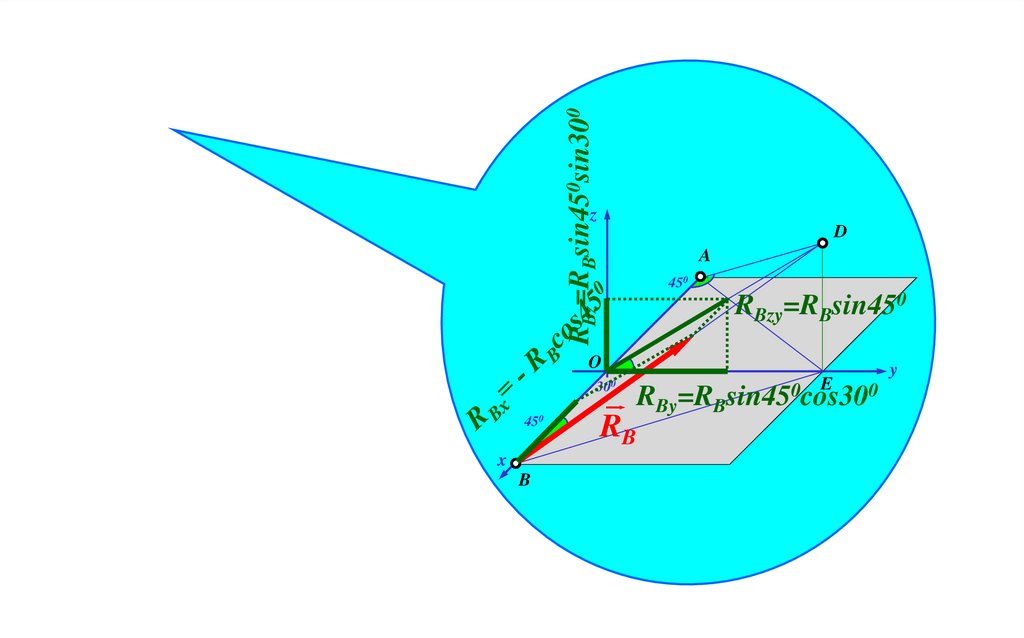
RBz=RBsin450sin300Груз весом 1кН подвешен на стержневом кронштейне, как показано на рисунке. Крепления
стержней в точках А, В, С и D – шарнирные. Углы наклона стержней к горизонтали: СD – 150,
BD и AD – 450. Острый угол между плоскостями ABD и ABC – 300.
Определить реакции стержней кронштейна.
zz
Решение:
D
zD
A
0
AA
RA cos 45 0 RB cos 45 0 ;
RA RB ; R =R
sin150
R
FXi 0 :
Cz
C
45
0
0
0
0
0
0 45
0
0 D
0
;
R
sin
45
cos
30
R
cos
15
R
sin
45
cos
30
F
0
:
R
cos
15
2
R
sin
45
cos
30
0; 0
Pz= - CP
Yi
A
C
B
A
R
=R
sin45
0
0 B
Bzy
R
R =R sin45 sin30
P
2
R
sin
45
cos
30
C
0
0
0
0
0
A
;
FZi 0 : RC sin 15 RA sin 45 sin 30 RB sin 45 sin 30 P 0 ; RC
0
cos 15
n
i 1
n
i 1
n
i 1
Az
R
A0
45
C
R
A
D
D
300
CC
O
150
450
B
B
0
O
O
z
A
0
A
00
y
0
y
0
2 RCA sin 45 0 cosP30=0
00 0 R =R sin450cos30
O
E
E
0
0
30
Ay
A
0cos30
x sin30
15 R2 R=R
sin 45
sin 30
P
P =0
00 ; y
sin45
A
0
By
B 0
y
cos 15 4500 150
y
R =RCcos15
45
RCx=0
P RCy
B
RA
2.64 кН ;
0
0
0
0
x
2 sin 45x (sin 30 cos 30 tg 15 )
BB
R
B
P
x
Ответ:
x
RB RA 2.64кH ;
2 2.64 0.707 0.866
RC
3.35 кH ;
0.966
RA 2.64 H ,
RB 2.64 H ,
RC 3.35 H .
11.
zRCz=RCsin150
D
RC
O
C
150
RCy=RCcos150
x
RCx=0
y
12.
RAz=RAsin450sin300z
A
RA
D
450
O
300
450
x
B
E
RAy=RAsin450cos300
y
13.
RBz=RBsin450sin300z
D
A
450
RBzy=RBsin450
O
300
450
x
B
RB
RBy=RB
E
0
sin45 cos300
y
14.
zD
A
450
Pz= - P
P
O
Px=0 30
450
x
B
0
E
y
Py=0