




















 Математика
МатематикаПохожие презентации:










Преобразования систем координат
1. ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ
ЛИТЕРАТУРАКраснопевцев Б.В. Фотограмметрия. М.: МИИГАиК, 2008.
Запрос в интернете: фотограмметрия краснопевцев.
2. ПРЕОБРАЗОВАНИЯ СИСТЕМ КООРДИНАТ
Технологическая схема преобразования систем координат3.
Фотограмметрическая обработка снимков состоит из последовательныхпреобразований координат. На рис приведена цепочка таких
преобразований координат при обработке стереопары и одиночного
снимка.
Координаты точек стереопары вначале переводят из системы
координат c'x'y'z' сканера в системы координат левого o'ЛxЛyЛzЛ и
правого o'ПxПyПzП снимков, а затем в системы координат SЛxЛyЛzЛ и
SПxПyПzП, соответственно.
Для снимка преобразование выполняется аналогично: сначала из
системы координат c'x'y'z' сканера в систему координат o'xyz, а
затем в систему координат Sxyz.
Если снимок получен с помощью цифровой фотокамеры, то сразу
выполняется переход из системы координат c'x'y'z' матрицы ПЗС в
системы координат SЛxЛyЛzЛ и SПxПyПzП для пары снимков и в систему
координат Sxyz для одиночного снимка (указано пунктирной линией).
4.
Координаты точек стереопары и снимка можно преобразовать сразу всистему координат OXYZ объекта, если известны с достаточной
точностью элементы внешнего ориентирования снимков, определяющие
их положения в пространстве координат объекта (преобразование
обозначено цифрой 0).
Если элементы внешнего ориентирования одиночного снимка
неизвестны или известны с недостаточной точностью, то с помощью
опорных точек, координаты которых известны в системе координат
объекта, вычисляют элементы внешнего ориентирования снимка, а затем
осуществляют переход в систему координат OXYZ объекта (этот вариант
обозначен цифрой 1).
2
5. Преобразование координат из системы координат сканера в систему координат снимка с началом в его центре проекции
6.
7.
На втором этапе вычисленные координаты x, y, z = 0дополняют элементами внутреннего ориентирования x0,
y0, f и получают координаты x-x0, y-y0, z = -f точек снимка в
системе координат Sxyz.
8. Преобразование координат из систем координат стереопары в систему координат объекта
zлZ
z
о
л
о
y
л
x
Sл
о
о
z
л
о
B
rл
RS л
y
rп
yл
m'
xл
o'л
Sп
x
п
о
п
yп
m
Y
o'п
xп
Rл
R
O
zп
п
Rп
M
Рис. 4.3
X
9.
10.
!!11.
12.
13.
Угол поворота ω называется поперечным (тангаж для самолета) и определяет вращение вокругоси ox, угол поворота α называется продольным (крен) и определяет вращение вокруг оси oy,
угол κназывается разворотом (снос) и определяет вращение вокруг оси oz
14. Формулы направляющих косинусов
z'1
z2
m
z1
y
y2
m
m
x
y1
x1
S
x', x1
y'
S
y1, y2
x2
Рис. 1.9
S
z2, z
x2
15.
16. Преобразование координат из систем координат стереопары идеального случая аэросъёмки в систему координат объекта
17.
18.
Т.к. высота фотографирования Н над точками, изобразившимися наснимке, меняется из-за рельефа местности, можно сделать вывод, что
масштаб съёмки в пределах снимка величина переменная.
Только на горизонтальном снимке, на котором изобразилась плоская
горизонтальная местность, масштаб будет одинаковым во всех
точках.
формула зависимости координаты точки объекта от измеренных
координат на идеальной стереопаре
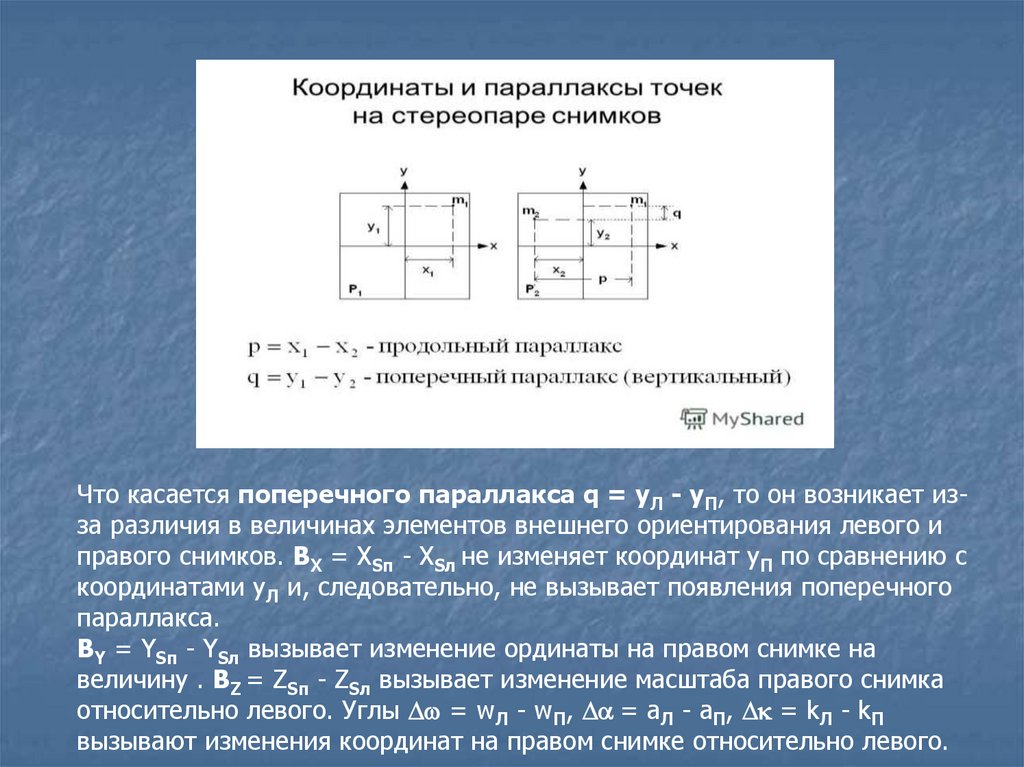
19. Причины появления продольного и поперечного параллаксов
20.
Что касается поперечного параллакса q = yЛ - yП, то он возникает изза различия в величинах элементов внешнего ориентирования левого иправого снимков. BX = XSп - XSл не изменяет координат уП по сравнению с
координатами уЛ и, следовательно, не вызывает появления поперечного
параллакса.
BY = YSп - YSл вызывает изменение ординаты на правом снимке на
величину . BZ = ZSп - ZSл вызывает изменение масштаба правого снимка
относительно левого. Углы D = wЛ - wП, D = aЛ - aП, D = kЛ - kП
вызывают изменения координат на правом снимке относительно левого.