















 Математика
МатематикаПохожие презентации:










Определение направляющих косинусов. Связь координат соответственных точек местности и снимка
1. Лекция №6 Определение направляющих косинусов. Связь координат соответственных точек местности и снимка
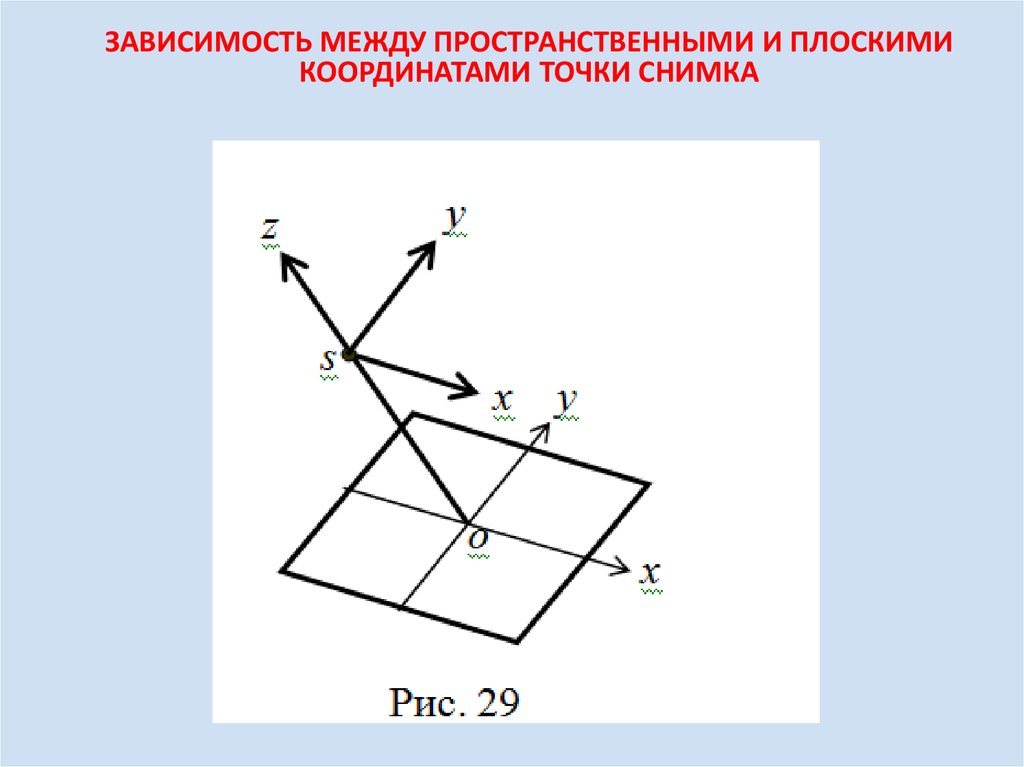
2. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
При изучении теории фотограмметрии и решении практическихзадач используются зависимости между плоскими координатами
x, y точек снимка и их пространственными координатами X', Y', Z'.
Эти зависимости можно установить, если известны элементы
внутреннего и угловые элементы внешнего ориентирования
снимка.
Рассмотрим систему координат S x y z с началом в точке
фотографирования S (рис. 29). Координатные оси x, y этой
системы расположим параллельно соответствующим осям на
снимке, а ось z совместим с главным лучом связки So. Тогда
координаты x, y любой точки снимка в пространственной системе
имеют те же значения, что и в плоской, а координата z для всех
точек постоянна и равна фокусному расстоянию снимка (z = -f).
3.
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИКООРДИНАТАМИ ТОЧКИ СНИМКА
4. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Системы S X' Y' Z' и S x y z имеют общее начало, поэтому впроцессе преобразования координат из одной сиситемы в
другую следует выполнять только вращение, что выражается,
например, формулой:
X
x
Y A y
(14)
Z
z
Ортогональная матрица А имеет третий порядок и называется
матрицей преобразования координат. Ее элементами являются 9
направляющих косинуса, поэтому выше приведенное
соотношение можно записать и так:
5. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
X a1 a2 a3 xY b1 b2 b3 y
Z c c c z
1 2 3
(15)
Причем, каждый из направляющих косинусов это косину
угла между соответствующими осями систем координат
участвующих в преобразовании, то есть:
X cos( X x) cos( X y ) cos( X z ) x
Y cos(Y x) cos(Y y ) cos(Y z ) y
Z cos( Z x) cos( Z y ) cos( Z z ) z
(16)
6. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
В приведенной выше формуле 16 не произведения координат,заключенных в скобках, а обозначение осей, между которыми
берется угол.
В силу ортогональности направляющие косинусы матрицы
связаны между собой шестью независимыми уравнениями:
2
2
2
2
2
2
b1c1 b2c2 b3c3 0,
2
2
2
c1a1 c2 a2 c3a3 0.
a1 a2 a3 1,
b1 b2 b3 1,
c1 c2 c3 1,
a1b1 a2b2 a3b3 0,
(17)
Один поворот в пространстве можно заменить тремя
последовательными поворотами в плоскости (вокруг осей Z, X и Y,
рис.30). Им будут соответствовать матрицы , Аω, и Аα.. В
соответствии с рис. 26 для каждого из поворотов соотношение 16
можно представить следующим образом:
7. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Рис. 30 Преобразование координатОдин поворот в пространстве можно заменить тремя
последовательными поворотами в плоскости (вокруг осей Z, X и Y,
рис.30). Им будут соответствовать матрицы , Аω, и Аα.. В
соответствии с рис. 26 для каждого из поворотов соотношение 16
можно представить следующим образом:
8. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Общая матрица преобразования A равна произведению:А = Аα Аω
cos sin
A sin
cos
0
0
0
0
1
0
0
1
A 0 cos sin
0 sin cos
cos 0 sin
A 0
1
0
sin 0 cos
9. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
После перемножения матриц и получим формулы длявычисления направляющих косинусов. В данном случае они будут
иметь вид:
a1 cos ( X , x) cos cos sin sin sin
a 2 cos ( X , y ) cos sin sin sin cos
a3 cos ( X , z ) sin cos
b1 cos (Y , x) cos sin
b2 cos (Y , y ) cos cos
b3 cos (Y , z ) sin
(18)
c1 cos ( Z , x) sin cos cos sin sin
c 2 cos ( Z , y ) sin sin cos sin cos
c3 cos ( Z , z ) cos cos .
10. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Таким образом, направляющие косинусы а1, а2, а3,…..,с3 зависят оттрёх угловых элементов внешнего ориентирования снимка и
являются координатами единичных векторов, определяющих
взаимное положение рассматриваемых систем координат: X' Y' Z'
и x y z.
Переход от пространственных координат к плоским
осуществляется по формулам:
x a1 b1 c1 X
T
y a2 b2 c2 Y A
z a b c Z
3 3 3
где АТ – транспонированная матрица А.
X
Y
Z
(19)
11. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Точка местности М и её изображение на снимке т находятся наодном проектирующем луче (рис.31). Положение точек S и М в
системе координат местности X Y Z определяется векторами
соответственно , а положение точек т и М в системе координат
S X' Y' Z' – векторами .
R r
где λ – скаляр,
R RM RS .
(24)
12. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
13. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Так какRX X X S , RY Y YS , RZ Z Z S ,
rX X ,
rY Y ,
rZ Z ,
то
X
X X S (Z Z S )
,
Z
Y
Y YS ( Z Z S )
Z
(27)
Или, с учётом равенства (15)
X X S (Z Z S )
Y YS ( Z Z S )
a1 ( x x0 ) a2 ( y y0 ) a3 z
,
c1 ( x x0 ) c2 ( y y0 ) c3 z
b1 ( x x0 ) b2 ( y y0 ) b3 z
.
c1 ( x x0 ) c2 ( y y0 ) c3 z
(28)
14. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Спроектируем векторы на координатные оси X, Y, Z, тогда:RX
RY
R
Z
rX
rY
r
Z
Из третьего равенства (25) найдем λ и подставим его выражение в
первое и второе. Тогда:
rX
RX RZ
,
rZ
rY
RY RZ .
rZ
15. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Итак, если элементы ориентирования снимка даны, то двауравнения (27) имеют три неизвестных. Отсюда следует, что
пространственные координаты точки местности по одиночному
снимку не определить. Можно получить лишь ее плановое
положение. Но надо знать высоту фотографирования H = - (Z – ZS).
В фотограмметрии часто используются обратные зависимости
(между координатами точки снимка и координатами
соответствующей точки местности). Для их получения,
спроектируем векторы равенства (24) на координатные оси
системы координат S x y z (рис. 31), в результате получим:
Rx
rx
R y ry .
Rz
rz
(29)
16. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
После ряда преобразований получим окончательную формулусвязи между координатами соответствующих точек снимка и
местности
a1 ( X X S ) b1 (Y YS ) c1 ( Z Z S )
X*
x x0 z
z *,
a3 ( X X S ) b3 (Y YS ) c3 ( Z Z S )
Z
a2 ( X X S ) b2 (Y YS ) c2 ( Z Z S )
Y*
y y0 z
z *.
a3 ( X X S ) b3 (Y YS ) c3 ( Z Z S )
Z
Формулы (28) и (33) справедливы при любых значениях
элементов ориентирования снимка.
Пусть x0 = y0 = 0, XS = YS = 0, ZS – Z = H, тогда при условии
расположения осей как на рис. 24 (снимок можно считать
горизонтальным) формулы (28) и (33) будут выглядеть
следующим образом:
(33)
17. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
x0X H
,
f
y0
Y H
.
f
f
x X ,
H
f
y Y ,
H
0
0
(34)
(35)
где x0, y0 – координаты точки горизонтального снимка.