




















")







Похожие презентации:








")

Introduction robot: a mechanic al piece robots and robotics intelligent systems computation and search tools. Math review
1. Lecture 1.
LECTURE 1.INTRODUCTION ROBOT:
A MECHANIC AL PIECE ROBOTS AND ROBOTICS
INTELLIGENT SYSTEMS COMPUTATION AND
SEARCH TOOLS. MATH REVIEW.
Lecturers:
Imankulova Binara Bakytzhanovna, Senior-lecturer, MSc.
Nalgozhina Nurgul Zhomartovna, Senior-lecturer, MSc.
Lab. works:
Alipbekov Adilet, Lecturer, MSc.
Department of Computer Engineering and
Information Security, IITU
Room #409
2. Course Plan
COURSE PLAN• This semester will consist of a 1 hour lecture per week and
a 2 hour laboratory session.
3. Resources and Literature
RESOURCES AND LITERATURE• Basic:
• Introduction to Robotics Mechanics and Control, By: John J.
Craig, Publisher: Pearson Education International, Latest edition,
ISBN: 0-13-123629-6 - (student’s softcopy)
• Supplementary:
• Robot Modeling and Control, M. Spong, M.Vidyasagar, S.
Hutchinson, Wiley & Sons, 2005 - (student’s softcopy)
• Robotics,Vision, and Control, Peter Corke, Springer, 2011 –
(student’s softcopy)
4. Lecture Plan
LECTURE PLAN1. Introduction to Robotics (1 h)
2. Manipulator kinematics (4 h)
3. Jacobians (2 h)
4. Dynamic Analysis and Forces (1 h)
5. Manipulator dynamics (1 h)
6. Trajectory Planning Path (2 h)
7. Actuators, Sensors (2 h)
8. Image Processing (1 h)
9. Conclusion (1 h)
5. Lecture Plan
LECTURE PLANThis class covers mathematical models that are essential:
Mathematical Models:
- Kinematics
- Dynamics
Planning and Control:
- Motion Planning
- Motion Control
- Force Control
6. Robotics: An Inter-Disciplinary Field
Robotics integrates science andengineering, and overlaps with
many disciplines:
RO B OT I C S : A N I N T E R D I S C I P L I N A RY F I E L D
• Artificial Intelligence
• Computer Vision / Perception
• Machine Learning / Estimation
/ Inference
• Neuroscience
• Electronic / Mechanical
Engineering
7. What is a robot?
WHAT IS A ROBOT?A robot is a re-programmable multi-functional
manipulator designed to move materials, parts,
tools, or specialized devices, through variable
programmed motions for the performance of a
variety of tasks.
A robot is an automatic apparatus or device that
performs functions ordinarily ascribed to human
beings, or operates with what appears to be
almost human intelligence.
8. What is a robot?
WHAT IS A ROBOT?A physically-embodied, artificially intelligent device with sensing and
actuation:
It can sense. It can act.
It must think, or process information, to connect sensing and action.
Pixels to torques. . .
9. Brief history
BRIEF HISTORYIn fact, the first use of the word "robot" occurred in a play about
mechanical men that are built to work on factory assembly lines
and that rebel against their human masters. These machines
in R.U.R. (Rossum's Universal Robots), written by Czech
playwright Karl Capek in 1921, got their name from the Czech
word for slave.
1941
Legendary science fiction writer Isaac Asimov writes the short
story ‘Liar!’ in which he describes the Three Laws of Robotics.
Asimov’s Three Laws of Robotics:
1. A robot may not injure a human being or, through inaction,
allow a human being to come to harm.
2. A robot must obey any orders given to it by human beings,
except where such orders would conflict with the First Law.
3. A robot must protect its own existence as long as such
protection does not conflict with the First or Second Law.
10. Brief history
BRIEF HISTORY1954
George Devol and Joe Engleberger design the first programmable
robot ‘arm’. This later became the first industrial robot,
completing dangerous and repetitive tasks on an assembly line at
General Motors (1962).
1964
The IBM 360 becomes the first computer to be mass-produced.
1986
The first LEGO based educational products are put on the
market and Honda launches a project to build a walking
humanoid robot.
2000
Honda debuts ASIMO, the next generation in its series of
humanoid robots.
2008
After being first introduced in 2002, the popular Roomba robotic
vacuum cleaner has sold over 2.5 million units, proving that there
is a strong demand for this type of domestic robotic technology.
11. What is Understood as Robot?
WHAT IS UNDERSTOOD AS ROBOT?12. Intelligent Robots
INTELLIGENT ROBOTSReact to the environment –
sensing
Adapt to the current conditions
Make decision and new goals
E.g., in robotic exploration
Even though they are
autonomous systems, the
behaviour is relatively well
defined
Adaptation and ability to solve
complex prob- lems are
implemented as algorithms and
tech- niques of Artificial
Intelligence.
In addition to mechanical and electronical
13. Stationary vs Mobile Robots
STATIONARY VS MOBILE ROBOTSRobots can be categorized into two main groups:
Stationary Robots
These are robot that are fixed in position.
Stationary Robots can be described in terms of joints and the
directions they move. This is very similar to human anatomy and the
direction the arm can move
Mobile Robots
Mobile robots have the capability to move around in their
environment and are not fixed to one physical location.
14. Stationary Robots
STATIONARY ROBOTS• Conventional robots needs separated and hu- man inaccessible
working space because of safety reasons
• Cooperating robots share the working space with humans
15. Types of Mobile Robots
TYPES OF MOBILE ROBOTS• Regarding the environment: ground, underground, aerial, surface, and
underwater vehicles
• Based on the locomotion: wheeled, tracked, legged, modular
16. Challenges in Robotics
CHALLENGES IN ROBOTICS• Autonomous vehicles – cars, delivers, etc
• Consumable robots – toys, vacuum cleaner, lawn mover,
pool cleaner
• Robotic companions
• Search and rescue missions
• Extraterrestrial exploration
• Robotic surgery
• Multi-robot coordination
In addition to other technological challenges, new efficient AI
algorithms have to be developed to address the nowadays and
future challenges.
17. Robotic Surgery
ROBOTIC SURGERY• Evolution of Laparoscopic Surgery
Complex operations with shorter postoperative
recovery
• Precise robotic manipulators and
teleoperated surgical robotic systems
• Further step is automation of surgical
proce- dures
One of the main main challenges is planning and
navigation in tissue
18. Robots in service & field
ROBOTS IN SERVICE & FIELD• Robotics technology has been applied to a wide variety of sectors with a
high economic and social impact. Since the past few years, it has been one of
the significant elements of industrial manufacturing automation, where over
1.5 million robots are currently operating. In the year 2017, around 380,000
industrial robots was sold all across the globe. Different industries witnessing
implementation of industrial robots in their processes includes automotive,
electrical, metal plastic & chemical, and food & beverage among others.
Automotive
Electrical/Electronics
Plastic & chemicals
Metal
Food & Beverages
• Robot technology
already represents a
significant market with a
growing impact factor,
both in economic and in
societal terms, such as
productivity,
employment, and
working conditions.
19. Robots in space
ROBOTS IN SPACE• NASA Space Station
20. Artificial Intelligence and Robotics
ARTIFICIAL INTELLIGENCE AND ROBOTICSArtificial Intelligence (AI) field originates in
1956 with the summary that a intelligent
machine needs:
• Internal models of the world Search
through possible solutions
• Planning and reasoning to solve problems
• Symbolic representation of information
• Hierarchical system organization
• Sequential program execution
• AI-inspired robot – Shakey
Artificial Intelligence laboratory of
Stanford Research Institute (1966–1972)
• Shakey – perception, geometrical map
building, planning, and acting – early AIinspired robot with purely deliberative
control
21. Robot: a mechanical piece
ROBOT: A MECHANICAL PIECE•A robot manipulator is a sequence of serial linkages,
which connect the end effector to the fixed base of the
robot.
•This sequential nature of robot arms is used to generate
the serial kinematics models.
Mechanically, a robot is composed of an arm and a wrist
subassembly plus a tool.
22. Degrees of Freedom (DOF)
DEGREES OF FREEDOM (DOF)23. Robot anatomy
ROBOT ANATOMYStationary Robots can be described in terms of joints and
the directions they move. This is very similar to human
anatomy and the direction the arm can move.
Waist: Moves from Side to Side at the Waist
Shoulder: Moves Up and Down from the Shoulder
Elbow: Move Up and Down at the Elbow
Wrist: Move from Side to Side and Rotates around the
wrist.
24. The joints
THE JOINTSThe basic skeleton of industrial robots, of
which is made up of mainly robotic arms,
is a combination of links and joints.
Relating it to a human body, parts that can
freely bend and move about, such as the
elbow and shoulder, are the joints, and the
bones connecting those joints are
equivalent to a robot’s links.
The principle of moving joints and
transmitting power through the links is
common in both humans and robots.
25. Revolute and Prismatic Joints
REVOLUTE AND PRISMATIC JOINTSSix different lower-pair joints are possible: revolute
(rotary), prismatic (sliding), cylindrical, spherical, screw,
and planar.
Of these, only rotary and prismatic joints are common in
manipulators
26. The links
THE LINKSRobots are roughly categorized into two types according to how their links
are arranged:
1) serial link and 2) parallel link.
The human arm is categorized as a serial link since its joints—the shoulder,
arm and wrist—are aligned in series.
27. Robot and human motion comparison
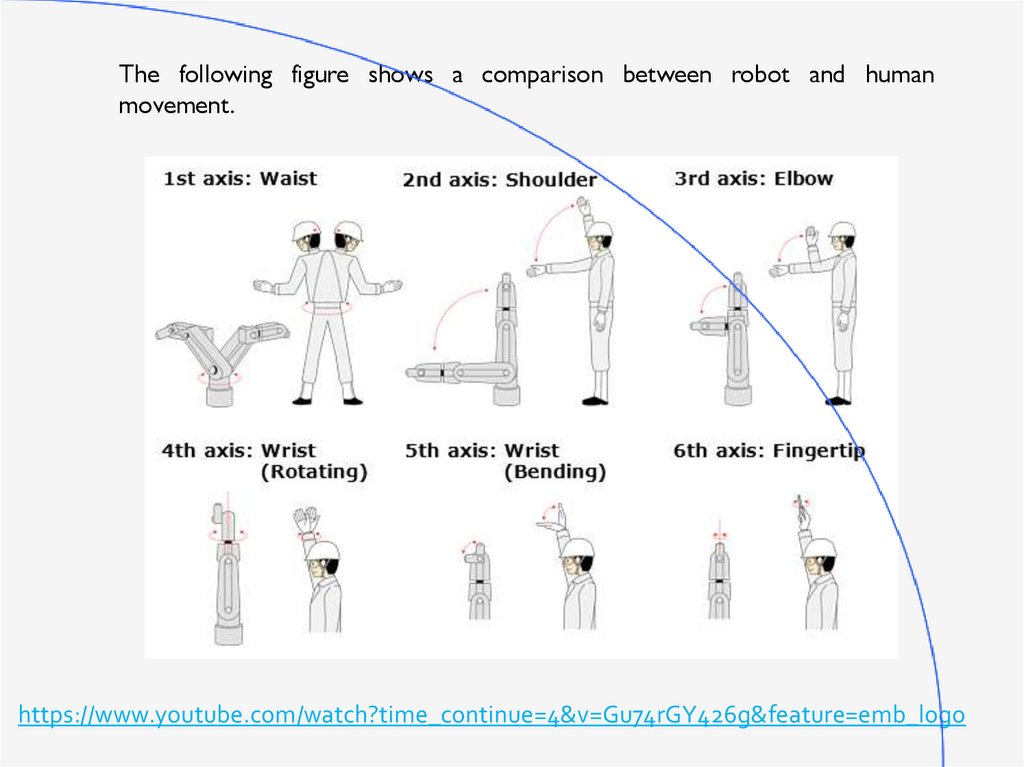
ROBOT AND HUMAN MOTION COMPARISONA vertical articulated robot is an industrial robot with a serial link structure. It
is generally composed of six joints (6 axes).
28.
The following figure shows a comparison between robot and humanmovement.
https://www.youtube.com/watch?time_continue=4&v=Gu74rGY426g&feature=emb_logo
29. What is required to move joints?
WHAT IS REQUIRED TO MOVE JOINTS?The illustration below shows the structure of the small-medium payloads
general-purpose robot “R series” from Kawasaki Heavy Industries, or
Kawasaki. This R series is active in a broad range of fields such as electronic
device assembly and arc welding. Since cables and harnesses can be built inside
the arm, interference with peripheral equipment can be avoided and the robot
can work in a small space. Its defining feature is speedy operation that can
correspond to agile movements.
30. Key components
KEY COMPONENTSPower
conversion unit
Sensors
Actuators
Controller
User
interface
Manipulator
linkage
Base