
Понятие точности. Постоянные ошибки")








 Установившиеся ошибки при произвольном входном сигнале")




 Установившиеся ошибки при гармоническом воздействии")












 Физика
ФизикаПохожие презентации:



")






Точность систем автоматического управления
1. Точность систем автоматического управления
ТОЧНОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГОУПРАВЛЕНИЯ
1) Понятие точности. Постоянные ошибки
2) Установившиеся ошибки при произвольном
входном сигнале
3) Установившиеся ошибки при гармоническом
воздействии
2. 1)Понятие точности. Постоянные ошибки
Основным назначением системы является какможно более точное воспроизведение управляющего
сигнала.
Точность системы можно оценивать величиной
разности управляющего сигнала v(t) и выхода y(t),
т. е. величиной ошибки
e(t)=v(t)-y(t)
Чем меньше величина e(t) пo модулю в каждый
данный момент времени, тем система с большей
точностью
(меньшей
ошибкой)
воспроизводит
управляющий сигнал.
На практике интересуются не полной ошибкой
системы e(t), а так называемой установившейся
ошибкой e (t )
y
3.
Структурная схема стандартной САУ имеет видf
v
e
W1(s)
y
W2(s)
Изображение ошибки имеет вид
E ( s ) e ( s )V ( s ) f ( s ) F ( s )
f ( s)
W2 ( s)
1 W ( s)
e (s)
1
1 W (s)
(1)
W (s) W1 (s)W2 (s)
Ошибка системы определяется суммой двух составляющих:
ошибкой системы от управляющего воздействия и ошибкой системы
от возмущающего воздействия.
4.
При определенных типах воздействий и определенной структуресистемы установившаяся ошибка в системе будет постоянной и может
быть вычислена на основании правил операционного исчисления по
выражению
e y lim e(t ) lim sE(s) lim s e (s)V (s)
t
s 0
(2)
s 0
Входные воздействия:
v (t ) v 01[t ]
v0
V (s)
s
v (t ) v1t
v1
V ( s) 2
s
v (t ) v 2t
2
2v 2
V ( s) 3
s
v (t ) v 0 v1t ... v t , v i const
V ( s)
v 0 v1
!v
2 ... 1
s s
s
5.
Пусть передаточная функция разомкнутой системы имеет видW ( s)
Если
0
v (t ) v 01[t ]
KN ( s )
,
s L0 ( s )
V (s)
0, 1...
v0
s
При подставлении в (2) имеем
v0
e
1 W (0)
0
y
e 0y - статическая ошибка системы
K p lim W ( s )
s 0
- коэффициент ошибки по положению
(3)
6.
Если1
v (t ) v 01[t ]
v0
s
v1
V ( s) 2
s
v(t ) v1t
e1y
V (s)
e 0y 0
e1y
v1
KV
- ошибка системы по скорости
KV lim sW ( s) - коэффициент ошибки по скорости
s 0
(4)
7.
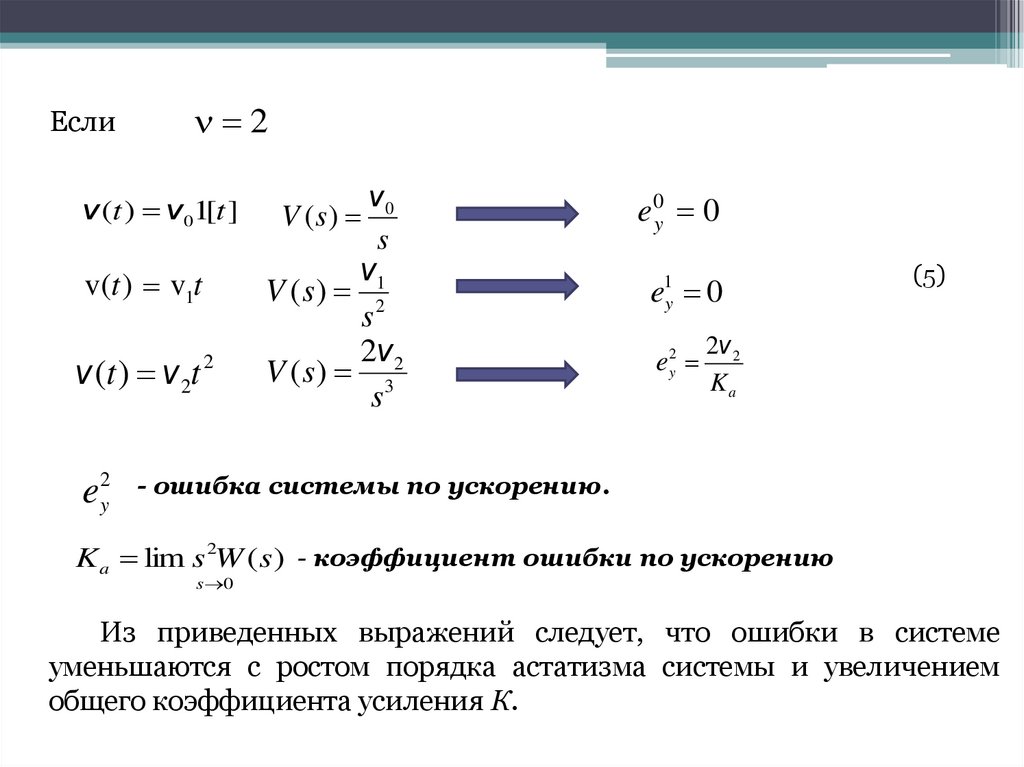
Если2
v (t ) v 01[t ]
v(t ) v1t
v (t ) v 2t
ey2
2
V (s)
v0
s
v1
V ( s) 2
s
2v 2
V ( s) 3
s
e 0y 0
e 0
1
y
ey2
(5)
2v 2
Ka
- ошибка системы по ускорению.
K a lim s 2W ( s) - коэффициент ошибки по ускорению
s 0
Из приведенных выражений следует, что ошибки в системе
уменьшаются с ростом порядка астатизма системы и увеличением
общего коэффициента усиления К.
8.
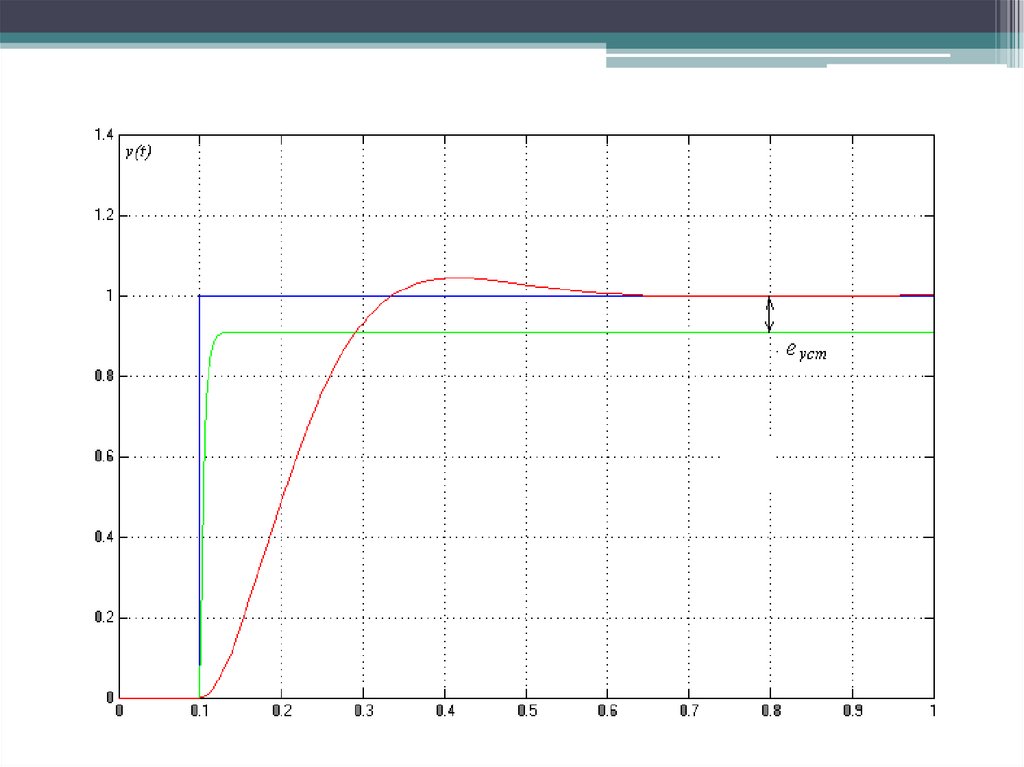
Переходные процессы в различных системах при отработке скачкапо положению и скорости:
1 – для статической системы,
2 – для системы с астатизмом первого порядка,
3 – для системы с астатизмом второго порядка.
y(t),
v(t)
v0
1
v0
v1t
K 1
v1
3
0
2
K
t
9.
Рассмотрим влияние порядка астатизма на точность отработкизадающего воздействия
10.
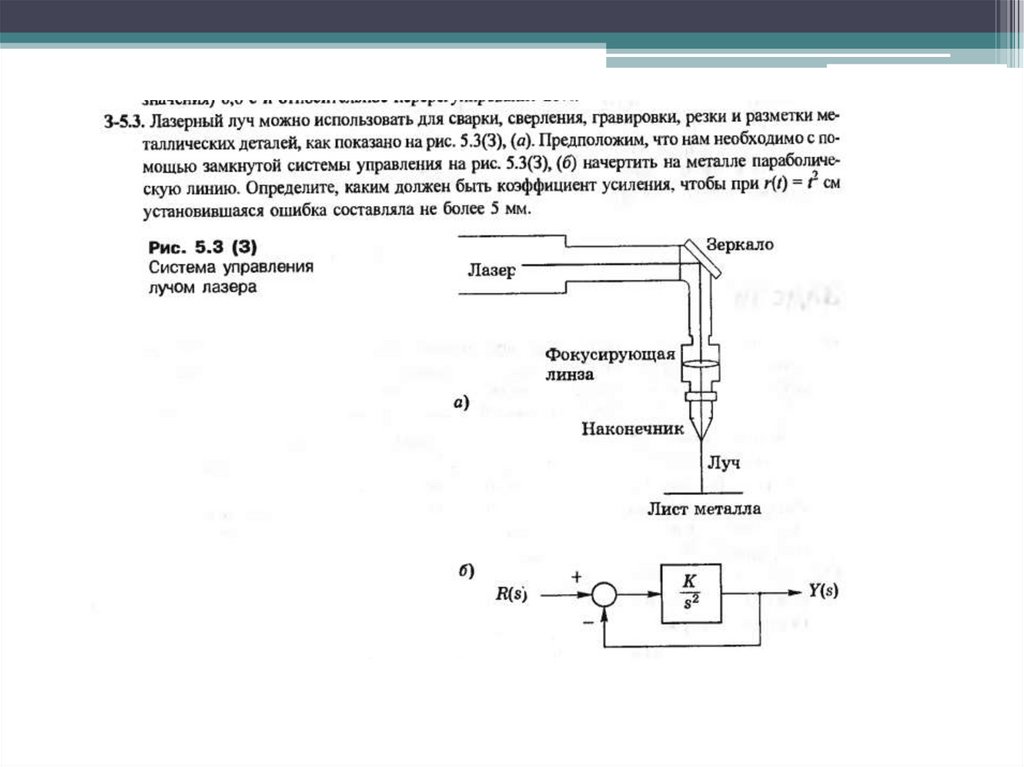
11.
Пример: Пусть имеем структурную схему системы в видеf (t ) f 01[t ]
v (t ) v 01[t ]
f
v
e
K1
T1s 1
K2
s
y
Рассмотрим влияние параметров системы на величину
установившейся ошибки, обусловленную действием как входного
сигнала так и сигнала возмущения.
12.
Изображение сигнала ошибки имеет видE ( s)
s T1s 1
s T1s 1 K1 K 2
V ( s)
K 2 T1s 1
s T1s 1 K1 K 2
F ( s)
Подставляя в это выражение
V ( s) v0 s
установившаяся ошибка будет равна
F (s) f0 s
e y f0 K1
Таким образом, установившаяся ошибка от управляющего воздействия
равна нулю (система астатическая по отношению к управляющему сигналу), а
ошибка от возмущающего воздействия постоянна (система статическая по
отношению к возмущению). Для уменьшения этой ошибки следует
увеличивать коэффициент усиления K1 первого звена; величина K2 не влияет
на ошибку.
13.
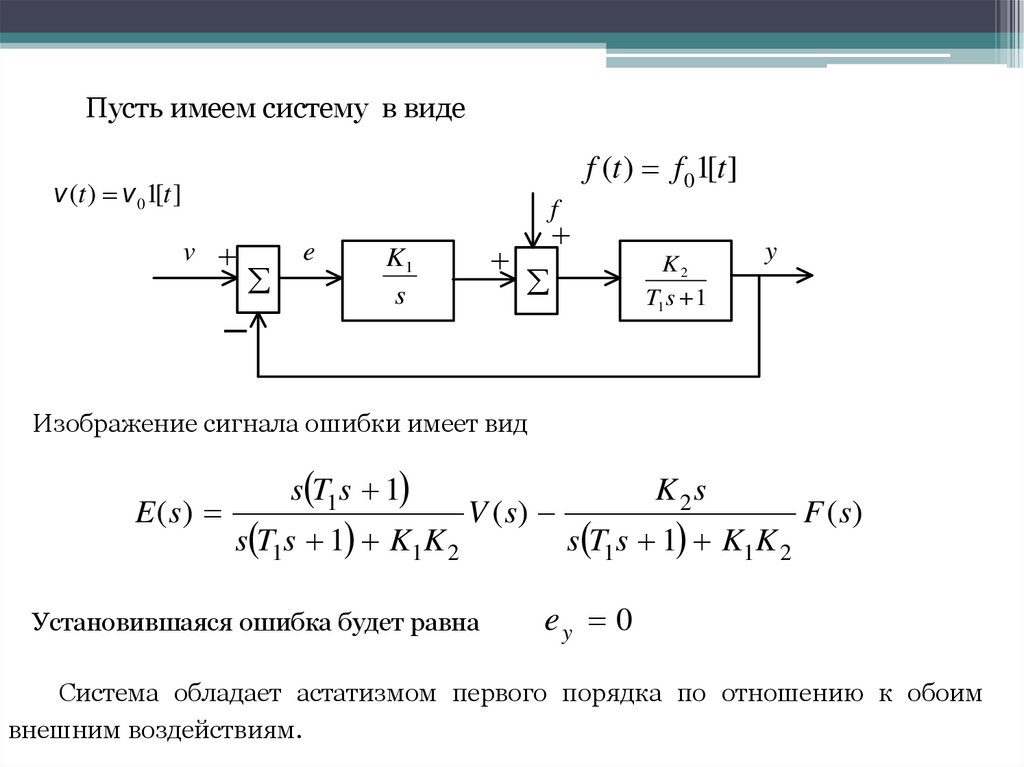
Пусть имеем систему в видеf (t ) f 01[t ]
v (t ) v 01[t ]
f
v
e
K1
s
K2
T1 s 1
y
Изображение сигнала ошибки имеет вид
E ( s)
s T1s 1
s T1s 1 K1 K 2
V ( s)
Установившаяся ошибка будет равна
K2s
s T1s 1 K1 K 2
F ( s)
ey 0
Система обладает астатизмом первого порядка по отношению к обоим
внешним воздействиям.
14. 2) Установившиеся ошибки при произвольном входном сигнале
Рассмотрим входное воздействие в видеУстановившаяся ошибка будет определяться по формуле
(6)
(7)
Коэффициенты ci носят название коэффициентов ошибок и
характеризуют, с каким весом функция v(t) и ее производные входят в
общее выражение для установившейся ошибки.
15.
ЕслиВ статической системе ν=0
Для системы с астатизмом первого порядка ν=1
Аналогично можно показать, что для астатической системы с астатизмом ν-го
порядка
(8)
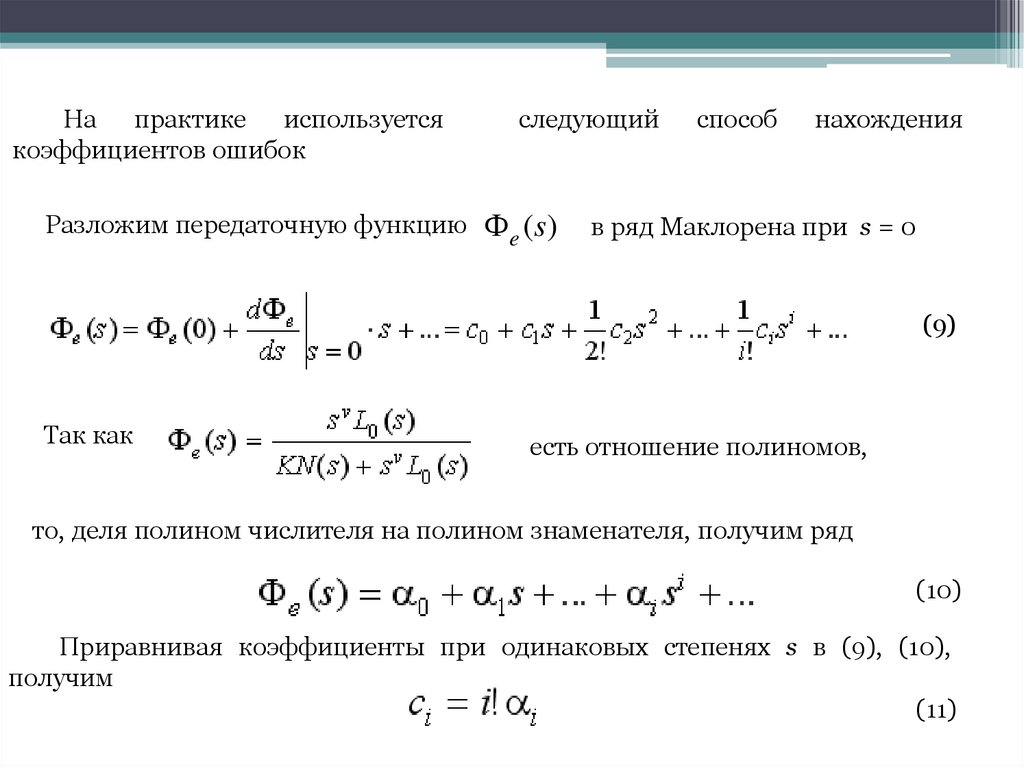
16.
На практике используетсякоэффициентов ошибок
Разложим передаточную функцию
следующий
e (s)
способ
нахождения
в ряд Маклорена при s = 0
(9)
Так как
есть отношение полиномов,
то, деля полином числителя на полином знаменателя, получим ряд
(10)
Приравнивая коэффициенты при одинаковых степенях s в (9), (10),
получим
(11)
17.
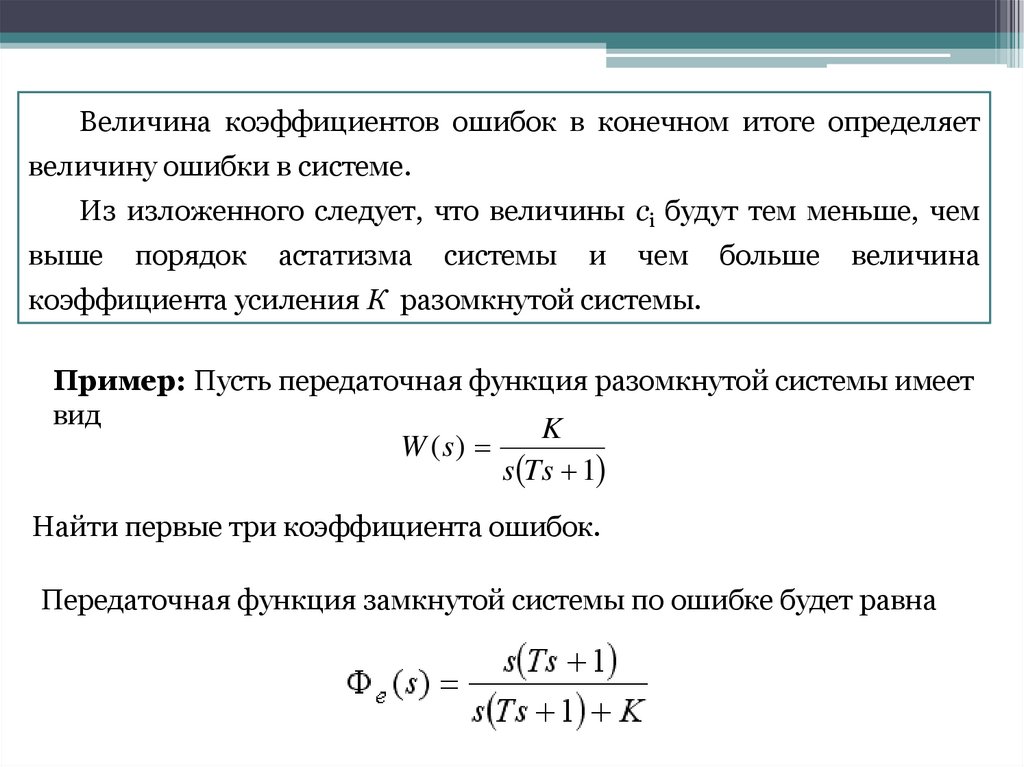
Величина коэффициентов ошибок в конечном итоге определяетвеличину ошибки в системе.
Из изложенного следует, что величины ci будут тем меньше, чем
выше
порядок
астатизма
системы
и
чем
больше
величина
коэффициента усиления К разомкнутой системы.
Пример: Пусть передаточная функция разомкнутой системы имеет
вид
K
W (s)
s Ts 1
Найти первые три коэффициента ошибок.
Передаточная функция замкнутой системы по ошибке будет равна
18.
Деля полином числителя на полином знаменателя, получимОпределим установившуюся ошибку в системе при воздействии
19.
Пример: Пусть передаточная функция разомкнутой системы имеет видНайти первые четыре коэффициента ошибок.
Передаточная функция замкнутой системы по ошибке будет равна
Примечание. Причем, если какой-либо коэффициент полинома
числителя равен нулю, то в выражении полинома на месте этого
коэффициента необходимо писать число «ноль».
20.
Деля полином числителя на полином знаменателя, получимНаходим
C 0;
0
C1 0;
21. 3) Установившиеся ошибки при гармоническом воздействии
Главная передаточная функция замкнутой системы имеет видВходной сигнал задан в виде
Выходной сигнал в установившемся режиме определяется по выражению
(12)
где
22.
Аналогично, зная передаточную функцию по ошибке, можно найти законизменения ошибки в установившемся режиме при гармоническом входном
сигнале
(13)
где
Выражения (12), (13) позволяют оценить ошибки воспроизведения
гармонического сигнала в установившемся режиме.
Из этих выражений следует, что, кроме ошибки воспроизведения
амплитуды входного гармонического сигнала, существуют и постоянные
фазовые
ошибки,
которые
определяются
видом
фазочастотных
характеристик замкнутой системы.
Обычно при анализе точности систем управления их не рассматривают,
ограничиваясь лишь анализом ошибок воспроизведения амплитуды.
23.
Из (12), (13) можно получить ошибки воспроизведения амплитудыгармонического сигнала на заданной частоте, равные
(14)
(15)
Типичный вид АЧХ замкнутой системы для случая астатической системы
A3 ( ) имеет вид
A3 ( )
1
A3 max
0
p
cp
n
24.
Под полосой пропускания системы понимают диапазон частот 0 nпри котором выполняется условие
(16)
Полоса пропускания является важной характеристикой системы. С одной
стороны, чем шире полоса пропускания, тем с меньшими ошибками система
воспроизводит управляющие сигналы.
Однако, с увеличение полосы пропускания система становится
чувствительной к влиянию высокочастотных помех.
Для статической системы
Для астатической системы
25.
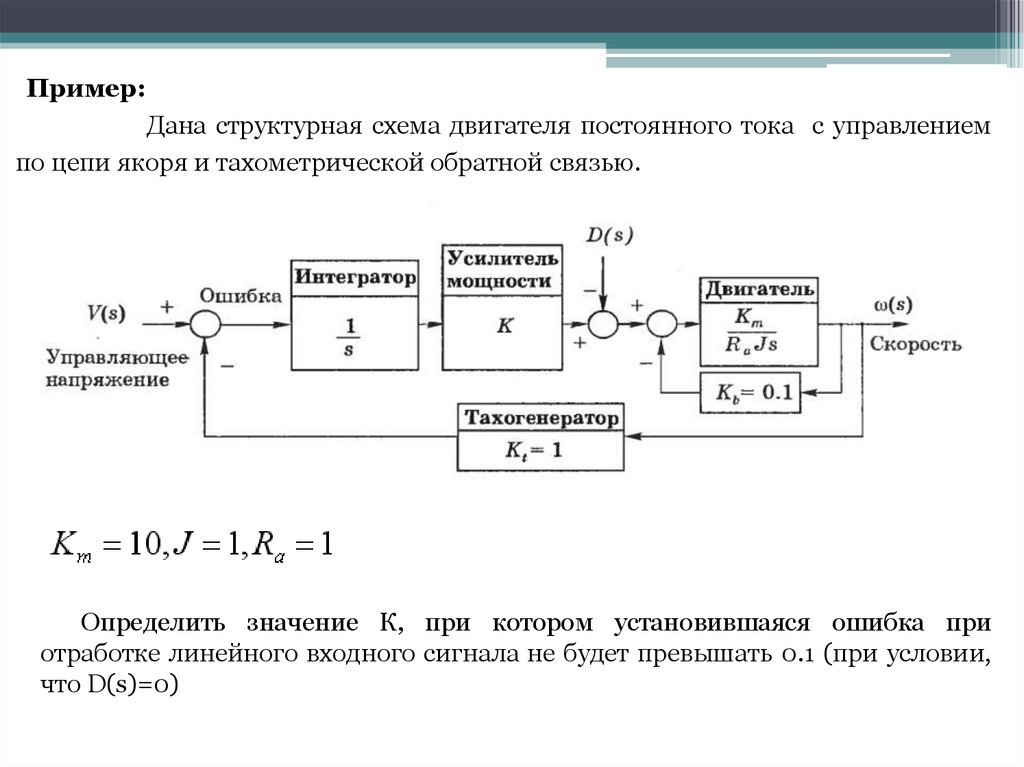
Пример:Дана структурная схема двигателя постоянного тока с управлением
по цепи якоря и тахометрической обратной связью.
Определить значение К, при котором установившаяся ошибка при
отработке линейного входного сигнала не будет превышать 0.1 (при условии,
что D(s)=0)
26.
Передаточная функция разомкнутой системы будет иметь видПередаточная функция замкнутой системы по ошибке
27.
Установившаяся ошибкаВходной сигнал имеет вид
Найдем значение К при котором установившаяся не будет превышать 0.1
28.
Установившаяся ошибкаe=0.1
v(t)
y(t)
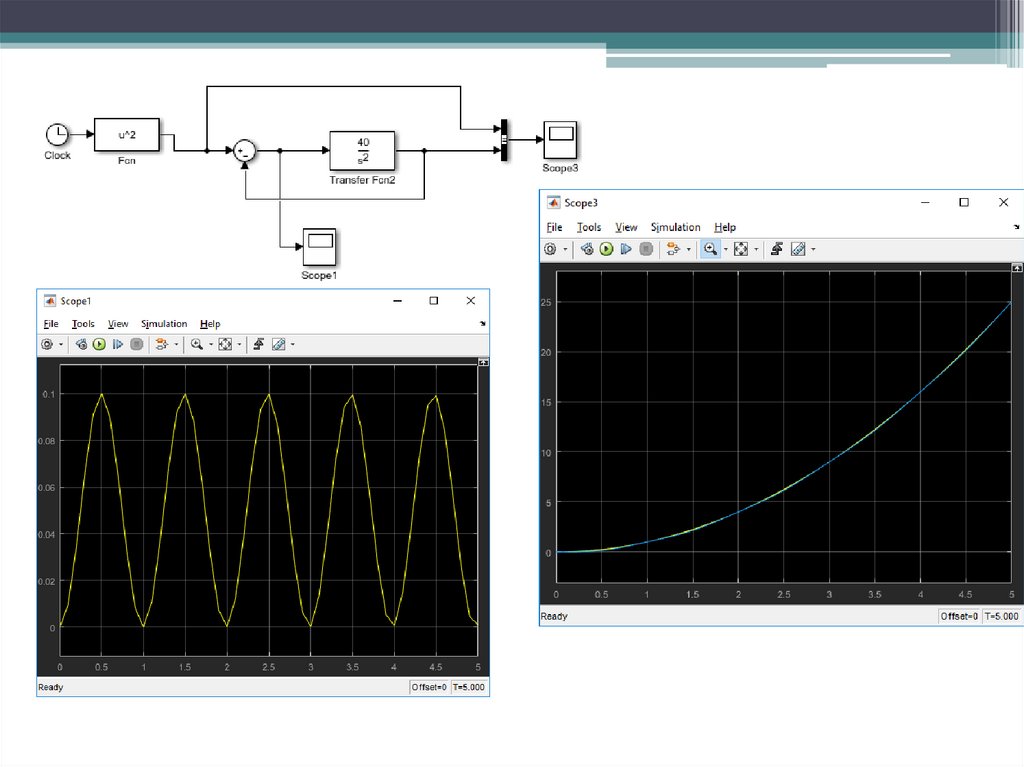
29.
При К=1, получить выражение для ошибки и изобразить график ееизменения при действии линейного возмущения d(t)=t, на интервале от 0 до 5
сек.
Входной сигнал имеет вид
v(t ) t
1
V (s) 2
s
Найдем значение К при котором установившаяся не будет превышать 0.1