








 Физика
ФизикаПохожие презентации:






")



Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергии для материальной точки и системы
1. Курс лекций по механике
Евразийский национальныйуниверситет им. Л.Н. Гумилева
Курс лекции по ФИЗИКЕ
МЕХАНИКА
Мухамедрахимова Г.И.
Курс лекций по
механике
Динамика (II часть)
Электронный учебный курс создан на основе лекций, читавшихся автором для студентов,
обучавшихся по инженерно-техническим специальностям г.Кокшетау и г.Астана (1981-2013 гг.).
Учебный материал соответствует календарным планам в объеме 1 семестра.
Для полной реализации анимационных эффектов при презентации необходимо использовать средство просмотра
Power Point не ниже, чем встроенный в Microsoft Office операционной системы Windows-ХР Professional.
Запуск презентации – F5, навигация – Enter, навигационные клавиши, щелчок мыши, кнопки.
Завершение – Esc.
Замечания и предложения можно послать по e-mail: isatai-07@miit.ru .
2. Содержание
Тема 9. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергиидля материальной точки и системы. Пример решения задач на использование теоремы об изменении
кинетической энергии материальной точки.
Тема 10. Пример решения задач на использование теоремы об изменении кинетической энергии
системы. Потенциальное силовое поле. Силовая функция. Потенциальная энергия системы. Закон
сохранения механической энергии.
Тема 11. Динамика поступательного и вращательного движения твердого тела. Физический маятник.
Динамика плоского движения твердого тела. Принцип Даламбера для материальной точки и
механической системы. Приведение сил инерции точек при поступательном и вращательном
движениях. твердого тела.
Рекомендуемая литература
Основная литература
Трофимова Т.И.Курс физики. М.: Высшая школа, 1990.
Дж.Б.Мэрион. Курс физики. М., 1994.
Лаврова Т.И. Курс физики. - М.: Высшая школа, 1987.
Волькенштейн В.С. Сборник задач по общему курсу физики. – М.: Наука, 1990.
Чертов А.Г. и др. Задачник по физике (с примерами решения задач и справочными материалами) М.:Высшая школа, 1973.
Дополнительная литература
Линднер Г. Картины современной физики. - М.: Мир, 1977.
Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. М.: Мир. 1977.
Трофимова Т.И.Краткий курс физики. М.: Высшая школа, 2000.
Зисман Г.А., Тодес О.М. Курс общей физики. М.: Наука, 1974.
Трофимова Т.И., Павлова З.Г. Сборник задач по физике. М.: Высшая школа, 2003.
Балаш В.А. Задачи по физике и методы их решения. – М.: Просвещение, 1974.
3. Тема 9
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение в результате взаимодействиямеханических систем может переноситься с одной механической системы на другую:
1.
без превращений в другую форму движения, т.е. в качестве того же механического движения,
2.
с превращением в другую форму движения материи (потенциальную энергию, теплоту, электрическую энергию и т.д.)
Каждый из этих случаев имеет свои измерители (меры) механического движения и механического взаимодействия, отстаиваемые в свое
время Декартом и Лейбницем (см. таблицу):
Ф. Энгельс показал существование и равноправность
обоих (векторных и скалярных) мер движения, каждой
Мера механического движения
Мера механического
из которых соответствуют свои меры механического
взаимодействия
взаимодействия.
Декарт
Количество движения Q mv
Импульс силы S F dt
Импульс силы является мерой действия силы при
изменении механического движения.
Работа является количественной мерой превращения
mv 2 Работа силы
Лейбниц
Кинетическая энергия
A F ds
T
механического движения в какую-либо другую форму
2
движения материи.
Работа силы, приложенной к материальной точке – Пусть точка приложения переменной по величине и направлению силы
перемещается по некоторой произвольной траектории. На малом (элементарном) перемещении силу можно считать постоянной и
элементарная работа силы равна проекции силы на направление перемещения (касательную к траектории движения),
умноженной на элементарное перемещение :
Знак элементарной работы определяется
бA F ds F cos ds
бA 0;
0 s
величиной угла и знаком cos :
2
ds
M
F
v
T
Поскольку часто более удобно работать с острыми углами, то в этом случае
используют острый угол и знак присваивают по следующему простому
правилу: если сила и перемещение совпадают по направлению,
то присваивается знак +, если противоположны по направлению, то знак .
Элементарная работа может быть записана в виде скалярного произведения: бA F dr
Работа на конечном перемещении M M1 получается
суммированием или интегрированием:
A бA
M1
A F ds
Частные случаи: 1. Сила постоянная по величине (F = const)
и направлению ( =const):
2. Сила постоянная по величине (F = const)
и параллельна перемещению ( =0):
2
бA 0.
и в проекциях: бA Fx dx Fy dy Fz dz.
M1
M1
A Fx dx Fy dy Fz dz.
A F dr
M
M
M
M1
M1
M
M
A F cos ds F cos ds Fs cos .
A Fs.
3. Сила перпендикулярна перемещению:
A 0
1
4. Тема 9
Можно доказать следующие теоремы и утверждения:Работа равнодействующей на некотором перемещении равна алгебраической сумме работ составляющих сил на
M1
M1
M1
M1
том же перемещении:
A Ai
A R dr ( F1 F2 ...) dr F1 dr F2 dr ... A1 A1 ... Ai
M
M
M
M
■
Работа постоянной сил по величине и направлению на составном перемещении равна алгебраической сумме работ этой силы
на каждом из составляющих перемещений:
A Asi
A F s F ( s1 s 2 ...) F s1 F s 2 ... As1 As 2 ... Asi
Ai 0
M1
M1
A ( R R ) dr ( R R ) dr 0;
■
Работа внутренних сил неизменяемой системы равна нулю:
■
Работа силы тяжести не зависит от вида траектории и равна произведению силы тяжести на разность высот:
i
'
M
M1
M1
M
M
M
( R ' R ).
A G( z1 z)
A Gx dx G y dy Gz dz ( G )dz Gz z1 G ( z1 z ); (Gx G y 0, Gz -G)
■
Работа линейной силы упругости (реакции пружины)
при перемещении из состояния равновесия:
z
Δx
A c
.
2
2
M1
M1
x2
A Rx dx ( cx)dx c
2
M
M
x1
x 0
x12
c ; ( Rx cx)
2
Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси. Запишем выражение для
элементарной работы силы, приложенной к точке, и выразим элементарное перемещение через угол поворота тела:
z
бA F ds F cos ds F cos R d
бA Fh d M z ( F )d .
ω
R
h
Работа силы, приложенной к вращающемуся твердому телу,
для конечного угла поворота:
h
F
d
ds
R
В частном случае постоянного значения момента силы относительно оси
работа равна произведению момента силы на угол поворота:
F
-работа силы, приложенной
к вращающемуся твердому
телу, выражается через
момент силы относительно
оси.
1
A M z ( F )d .
A M z ( F )( 1 ).
Мощность – величина, характеризуемая количеством работы, произведенной в единицу времени:
T
A
F ds
N
F v F v .
dt
dt
Мощность силы, приложенной к точке:
Мощность силы, приложенной к вращающемуся твердому телу:
N
A
dt
M z d
M z z M .
dt
N
A
dt
.
2
5. Тема 9
Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное количество другогодвижения:
■
Кинетическая энергия
материальной точки:
mv2
T
2
■
Кинетическая энергия
системы материальных точек:
■
Кинетическая энергия твердого тела
при поступательном движении:
MvC2
T
2
■
Кинетическая энергия твердого тела
при вращательном движении:
I 2
T z z
2
■
Кинетическая энергия
твердого тела при плоском
движении:
T
MvC2 I zC z2
2
2
mk vk2 v 2
T
2
2
mk vk2
T
2
MvC2
v2
mk 2 M 2 ;
mk vk2
mk ( z hk ) 2 z2
T
2
2
2
(v1 v2 ... v vC )
I z z2
m h 2 ;
2
k k
( I z mk hk2 )
mk vk vk
m (v v ) (vC vkC ) MvC2
m v2
k C kC
vC mk vkC k kC .
2
2
2
2
2
dr
d
I zC z
vC mk kC vC ( mk rkC ) 0; ( mk rkC 0)
dt
dt
2
T
Теорема об изменении кинетической энергии материальной точки – Изменение кинетической энергии точки равно работе
сил, действующих на точку на том же перемещении:
Проинтегрируем полученное соотношение:
Запишем основной закон динамики точки:
ma F R
v
i
Выразим ускорение через скорость и умножим
dv
dr R dr
левую и правую части соотношения скалярно m
dt
на дифференциал радиуса-вектора :
или mv dv R dr .
A
v0
После подстановки пределов получаем:
mv2
v v
md
d
2
2
mv2 M
mv2
d
dA
;
2 M
2
0
dA
mv2 mv02
A
2
2
Теорема об изменении кинетической энергии системы – Изменение кинетической энергии системы равно работе сил,
действующих на систему на соответствующих перемещениях точек системы:
Запишем теорему об изменении кинетической энергии для произвольной точки системы,
при этом выделим работу внешних и внутренних сил, приложенных к данной точке:
mk vk2 mvk20
Aki Ake .
2
2
mk vk2
mvk20
Aki Ake .
Просуммируем левые и правые части соотношений:
2
2
Для неизменяемой системы:
В левой части получили разность кинетических энергий системы:
T T0 Aki Ake .
T T0 Ake ;
A
i
k
0
3
6. Тема 9
Пример решения задачи на применение теоремы об изменении кинетической энергии для материальной точки – Снарядмассы m выбрасывается пружинным устройством из канала под углом к горизонту. Длина нерастянутой пружины жесткостью c
равна длине канала l0. Перед выстрелом пружина сжимается на величину d. Определить скорость снаряда при вылете из канала,
а также максимальную высоту полета.
Дано: , c, d, m, l0
Начальная скорость снаряда равна нулю: v0 0.
Найти: v1, H
Работа сил, приложенных к объекту, равна:
v2
1. Выбираем объект - снаряд
A AN AG AR .
v1
d
2.
Отбрасываем связи – ствол, пружину
Работа нормальной реакции равна нулю (направление
N
реакции перпендикулярно перемещению): AN 0.
R
3. Заменяем связи реакциями – N, R
G H
4. Добавляем активные силы – G
Работа силы тяжести:
AG G h mgd sin .
Работа упругой реакции пружины
(направление реакции совпадает
с перемещением):
mv12
Подставляем определенные
0 mgd sin
величины в теорему:
2
5. Записываем теорему об изменении
кинетической энергии для точки:
G
Определяем максимальную высоту полета
(повторяем шаги 1-5):
2
2
mv2 mv1
A
2
2
mv12 mv02
A
2
2
Отсюда величина скорости вылета снаряда:
Вертикальная скорость снаряда в наивысшей точке траектории равна нулю : v2 y 0.
v1
c
d2
,
2
d2
.
2
cd 2
2 gd sin .
m
Горизонтальная скорость снаряда постоянная (из закона
сохранения проекции на ось x количества движения точки)
и равна:
2
AG G h mg( H l0 sin ).
cd 2
cd 2
Подставляем определенные
m
2 gd sin cos 2 m
2 gd sin
m
величины в теорему:
m
mg ( H l sin ).
0
2
2
После некоторых сокращений и
Отсюда максимальная
cd 2
(
gd sin ) sin 2 g ( H l0 sin ).
преобразований:
высота полета:
2m
Работа силы тяжести:
AR c
v2 x v1x
H (
cd
2 gd sin cos .
m
cd 2
d sin ) sin 2 l0 sin .
2mg
Заметим, что предыдущее выражение можно более быстро получить,
записывая теорему об изменении кинетической энергии только для
вертикальной скорости движения точки, поскольку горизонтальные силы
отсутствуют и горизонтальная скорость не изменяется..
4
7. Тема 10
Пример решения задачи на применение теоремы об изменении кинетической энергии для системы – Массивный бумажныйрулон радиуса R, приведенный в движение толчком, катится без проскальзывания по инерции вверх по наклонной шероховатой
плоскости под углом к горизонту с некоторой начальной скоростью. Коэффициент трения качения fk. Определить начальную скорость
рулона, необходимую для того, чтобы он мог перевалить через вершину высотой H от начального положения.
Дано: , fk, H, R
Найти: v0
s
Кинетическая энергия на вершине
1. Выбираем объект - рулон
равна нулю:
T 0.
N
2.
Отбрасываем
связи
–
опорную
плоскость
v
Кинетическая энергия
MvC2 0 I zC z20
в начальный момент времени T0
3. Заменяем связи реакциями – N, Fтр, Mк
H
2
2
равна:
Mк
4. Добавляем активные силы – G
2
Fтр
MR
Момент инерции массы сплошного
G
I zC
5. Записываем теорему об изменении
цилиндра равен:
2
кинетической энергии для твердого тела:
vC 0
Угловая
скорость
равна:
z
0
e
Подставляем определенные
величины в теорему:
3MvC2 0
H
MgH f к Mg cos
,
4
R sin
После некоторых сокращений и
преобразований получаем:
vC 0
4
ctg
gH (1 f к
).
3
R
T T0 A
R 2
MvC2 0 1 MR 2 vC 0
3MvC2 0
T0
.
2
2 2 R
4
Работа сил, приложенных к объекту, равна:
Ae AN AFтр AG AMк .
Работа нормальной реакции равна нулю:
AN 0.
Работа силы трения скольжения равна нулю (приложена в МЦС): AFтр 0.
Тогда кинетическая энергия
в начальный момент времени:
AG G h MgH .
Работа момента сопротивления качению: AMк M к ( 0 ).
M к f к N f кG cos f к Mg cos .
Момент сопротивления качению:
s
H
Разность углов поворота рулона:
0
.
R R sin
Работа силы тяжести:
Заметим, что выражение для начальной
скорости не зависит от массы рулона.
Масса рулона, как мера инертности, будет
влиять на величину усилия, которое должно быть приложено к телу, чтобы сообщить ему указанную начальную скорость.
Потенциальное силовое поле
Силовое поле – пространство, в каждой точке которого на материальную точку действуют силы, зависящие от координат точки.
Стационарное силовое поле – действующие силы которого не зависят от времени, F = F(x, y,z) (поле силы тяжести, поле силы
упругости).
Нестационарное силовое поле - действующие силы которого зависят от времени, F = F(x, y,z, t) (электромагнитное поле).
5
8.
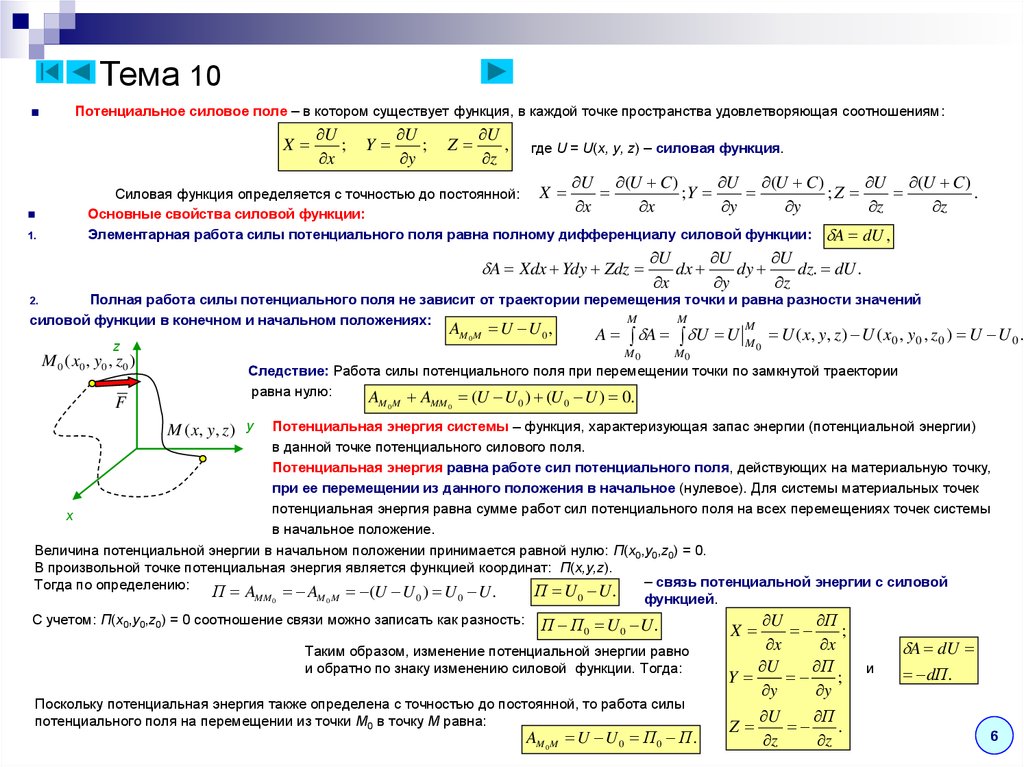
Тема 10■
Потенциальное силовое поле – в котором существует функция, в каждой точке пространства удовлетворяющая соотношениям:
X
U
;
x
Y
U
;
y
Z
U
,
z
где U = U(x, y, z) – силовая функция.
U
1.
(U C )
U
(U C )
;Y
Силовая функция определяется с точностью до постоянной: X
x
x
y
y
Основные свойства силовой функции:
Элементарная работа силы потенциального поля равна полному дифференциалу силовой функции:
A Xdx Ydy Zdz
;Z
U (U C )
.
z
z
A dU ,
U
U
U
dx
dy
dz. dU .
x
y
z
Полная работа силы потенциального поля не зависит от траектории перемещения точки и равна разности значений
M
M
силовой функции в конечном и начальном положениях:
M
2.
AM 0 M U U 0 ,
z
M 0 ( x0 , y0 , z0 )
F
A A U U
M0
M0
M0
U ( x, y, z ) U ( x0 , y0 , z 0 ) U U 0 .
Следствие: Работа силы потенциального поля при перемещении точки по замкнутой траектории
равна нулю:
A
A
(U U ) (U U ) 0.
M 0M
MM 0
0
0
Потенциальная энергия системы – функция, характеризующая запас энергии (потенциальной энергии)
в данной точке потенциального силового поля.
Потенциальная энергия равна работе сил потенциального поля, действующих на материальную точку,
при ее перемещении из данного положения в начальное (нулевое). Для системы материальных точек
потенциальная энергия равна сумме работ сил потенциального поля на всех перемещениях точек системы
x
в начальное положение.
Величина потенциальной энергии в начальном положении принимается равной нулю: П(x0,y0,z0) = 0.
В произвольной точке потенциальная энергия является функцией координат: П(x,y,z).
– связь потенциальной энергии с силовой
Тогда по определению:
П U0 U.
П AMM 0 AM 0 M (U U 0 ) U 0 U .
функцией.
С учетом: П(x0,y0,z0) = 0 соотношение связи можно записать как разность: П П U U .
U
П
M ( x, y , z ) y
0
0
Таким образом, изменение потенциальной энергии равно
и обратно по знаку изменению силовой функции. Тогда:
Поскольку потенциальная энергия также определена с точностью до постоянной, то работа силы
потенциального поля на перемещении из точки M0 в точку M равна:
AM 0 M U U 0 П0 П .
X
;
x
x
U
П
Y
;
y
y
U
П
Z
.
z
z
A dU
и
dП.
6
9. Тема 10
Примеры потенциальных силовых полейПоле силы тяжести. Сила тяжести, работа которой не зависит от траектории, является примером силы, имеющей потенциал –
геометрическое место точек пространства, в которых потенциальная энергия постоянна. Проекции силы тяжести на координатные
оси равны:
Последнее выражение есть дифференциальное уравнение, которое легко
z
П
M1 ( x1 , y1 , z1 )
X
0;
решается разделением переменных и интегрированием левой и правой
x
частей:
П dП
M ( x, y , z )
H
y
y
G
z
x
M ( x2 , y 2 , z 2 )
П
0;
y
П
Z
G.
z
Y
z
■
П Gz C.
G
AM1M 2 П1 П 2 (Gz1 C ) (Gz2 C ) G ( z1 z 2 ) GH .
Поле центральной силы притяжения. Силы тяжести могут считаться параллельными и постоянными по величине только в небольшой
области пространства в поле тяготения Земли и эквипотенциальные поверхности могут считаться плоскими только в пределах этой
области. В случае рассмотрения силы притяжения к центру величина силы прямо пропорциональна массе и обратно пропорциональна
квадрату расстояния между материальной точкой и центром тяготения O:
m
z
M ( x, y , z )
P
O
z
r
y
x
dz
Эквипотенциальные поверхности (П = const) представляют собой
горизонтальные плоскости. Сила тяжести направлена перпендикулярно
к этим плоскостям в сторону уменьшения значений потенциальной энергии.
Работа силы тяжести на перемещении из точки M1 в точку M2:
x
y
x
Проекции силы
притяжения
на координатные
оси равны:
m x
X P cos( P , x) k 2 ;
r r
m y
Y P cos( P , y ) k 2 ;
r r
m z
Z P cos( P , z ) k 2 .
r r
Полученное выражение есть дифференциальное уравнение,
которое легко решается интегрированием левой и правой частей:
P k
r2
Элементарная работа силы притяжения:
A Xdx Ydy Zdz k
m
( xdx ydy zdz ).
r3
d (r 2 ) d ( x 2 y 2 z 2 ), rdr xdx ydy zdz.
Дифференциал
потенциальной энергии:
dП k
mdr
r2
m
dП dU A k 3 rdr.
r
m
П k C.
r
Эквипотенциальные поверхности (П = const) поля центрального тяготения представляют собой сферические поверхности с центром
в точке O. Сила притяжения направлена по нормали к этим поверхностям в сторону уменьшения значений потенциальной энергии.
Закон сохранения механической энергии – При движении механической системы в стационарном потенциальном поле полная
механическая энергия системы остается постоянной.
По теореме об изменении кинетической энергии системы:
T2 T1 Ak П1 П 2 .
Отсюда:
T2 П2 T1 П1 const.
Сумму кинетической и потенциальной энергий называют полной механической энергией системы.
7
10. Тема 11
Динамика поступательного и вращательного движений твердого тела – рассмотренные теоремы динамики системы даютдифференциальные уравнения, описывающие эти два типа движения твердого тела.
Дифференциальные уравнения поступательного движения твердого тела – из теоремы о движении центра масс системы:
M x C Rxe ;
M y C R ye ;
M z C Rze .
Дифференциальные уравнения вращательного движения твердого тела вокруг неподвижной оси – из теоремы об изменении
момента количества движения системы:
I M e .
z z
z
Физический маятник – твердое тело, имеющее неподвижную горизонтальную ось вращения, не проходящую через его центр тяжести, и
находящийся под действием только силы тяжести. При отклонении физического маятника от положения равновесия возникает возвращающий
момент от силы тяжести, наличие которого является условием колебательного движения (качания) относительно положения равновесия.
1. Выбираем объект (маятник):
2. Отбрасываем связи (цилиндрические шарниры):
3. Заменяем связи реакциями (суммарные реакции двух шарниров):
z
YO
y
O
С
O1
x
z
y
O
XO
Подставим момент инерции
и представим уравнение в виде:
G
YO
l
x
O1
G
I x M xe Ga sin .
Ga
sin 0. - дифференциальное уравнение качаний
физического маятника.
Ix
I x M xe Gl sin , где I x ml 2 , G mg.
Рассмотрим математический маятник длиной l:
Представим уравнение в виде:
a l
XO
4. Запишем дифференциальное уравнение вращения оси x :
g
sin 0.
l
- дифференциальное уравнение качаний
математического маятника.
Поскольку полученные уравнения отличаются лишь коэффициентами, то всегда можно поставить
в соответствие физическому маятнику математический маятник, период качаний которого равен
периоду данного физического маятника. Для этого достаточно приравнять коэффициенты:
Отсюда можно определить приведенную длину физического маятника:
Последнее неравенство
легко доказывается:
l
Ix
I ma
I
xC
xC a.
ma
ma
ma
2
l
Ixg Ix
; l a.
Ga ma
Ga g
.
Ix
l
Точка O1 физического маятника, находящаяся на расстоянии l по прямой OC называется центром качаний маятника.
В случае малых колебаний sinφ φ:
Период
колебаний:
T
Ix
2
2
.
k
Ga
Ga
Ga
0 или k 2 0, где k
.
Ix
Ix
Используя формулу для периода колебаний можно определять опытным путем
моменты инерции тел сложной формы (положение центра тяжести можно найти
методом подвешивания).
8