 Физика
ФизикаПохожие презентации:










Основні положення статики. Лекція 2
1.
2.
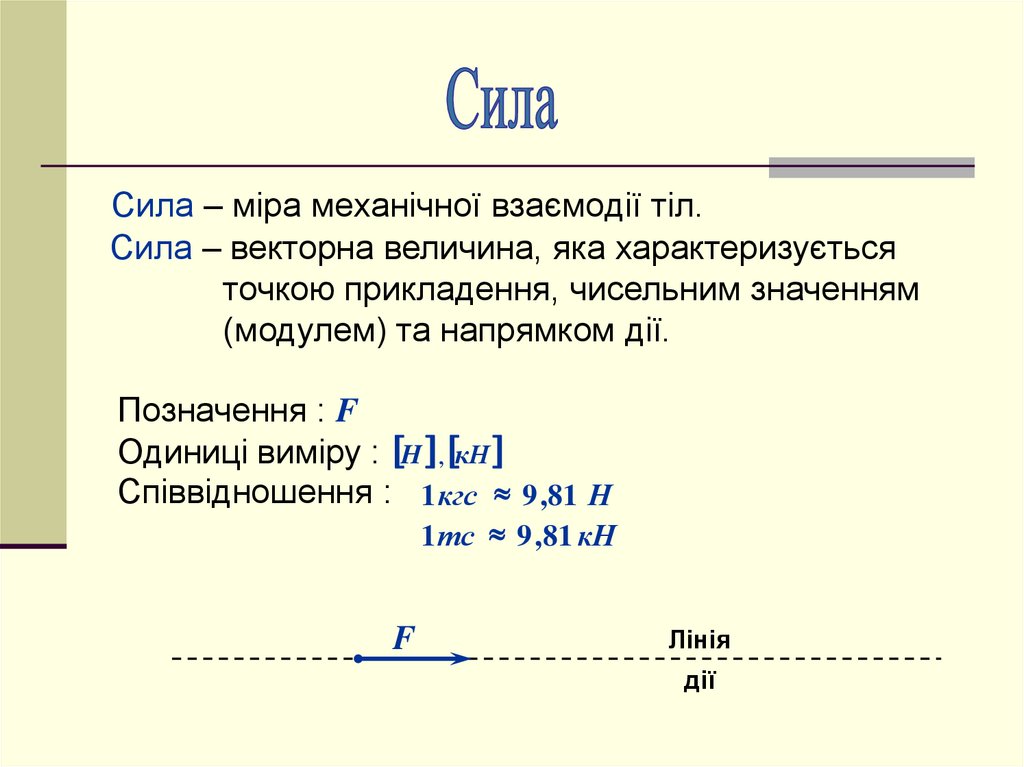
Сила – міра механічної взаємодії тіл.Сила – векторна величина, яка характеризується
точкою прикладення, чисельним значенням
(модулем) та напрямком дії.
Позначення : F
Одиниці виміру : [H ] , [кН ]
Співвідношення : 1 кгс 9 ,81 Н
1 тс 9 ,81 кН
F
Лінія
дії
3.
Сукупність сил, які діють тіло, утворюють системусил.
Систему сил можна замінити однією силою, яка
називається рівнодіючою.
Визначення рівнодіючої за її складовими
називається додаванням сил.
Заміна однієї сили на кілька сил називається
розкладанням сил.
Сила, що дорівнює по модулю рівнодіючої і
спрямована по лінії її дії в протилежний бік,
називається силою, що врівноважує.
4.
1. (Принцип інерції) Будь-яке тіло перебуває у станіспокою (рівноваги) чи рівномірного прямолінійного
руху, якщо нього діє система взаємно
врівноважених сил.
5.
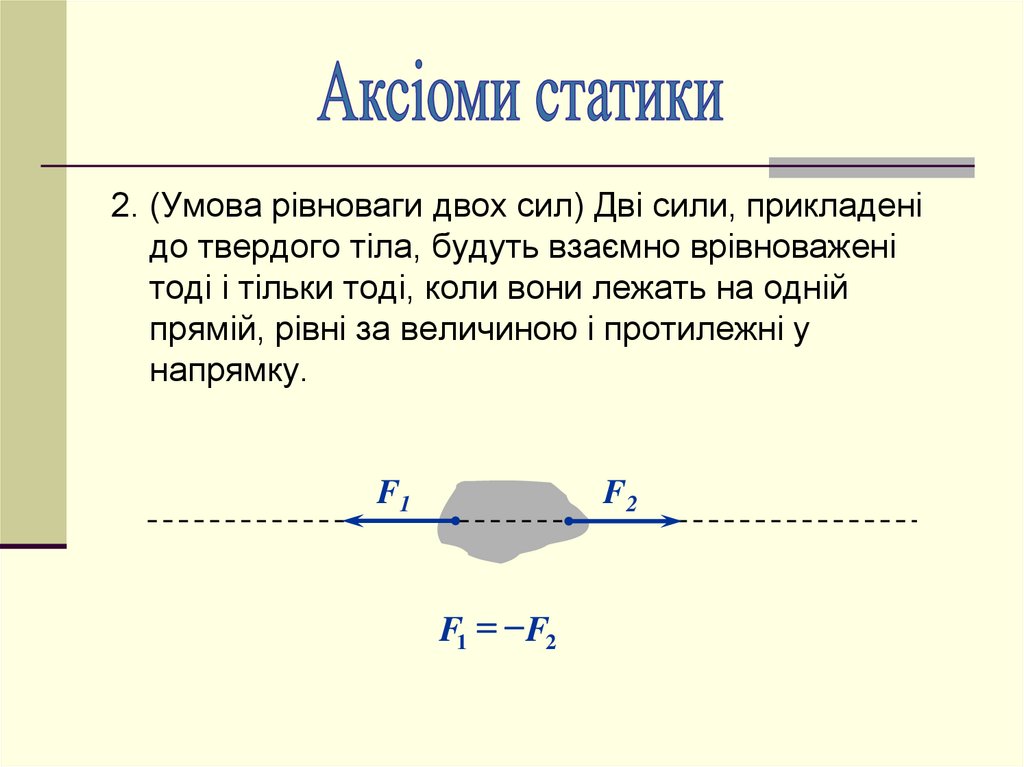
2. (Умова рівноваги двох сил) Дві сили, прикладенідо твердого тіла, будуть взаємно врівноважені
тоді і тільки тоді, коли вони лежать на одній
прямій, рівні за величиною і протилежні у
напрямку.
F1
F2
F1 = - F2
6.
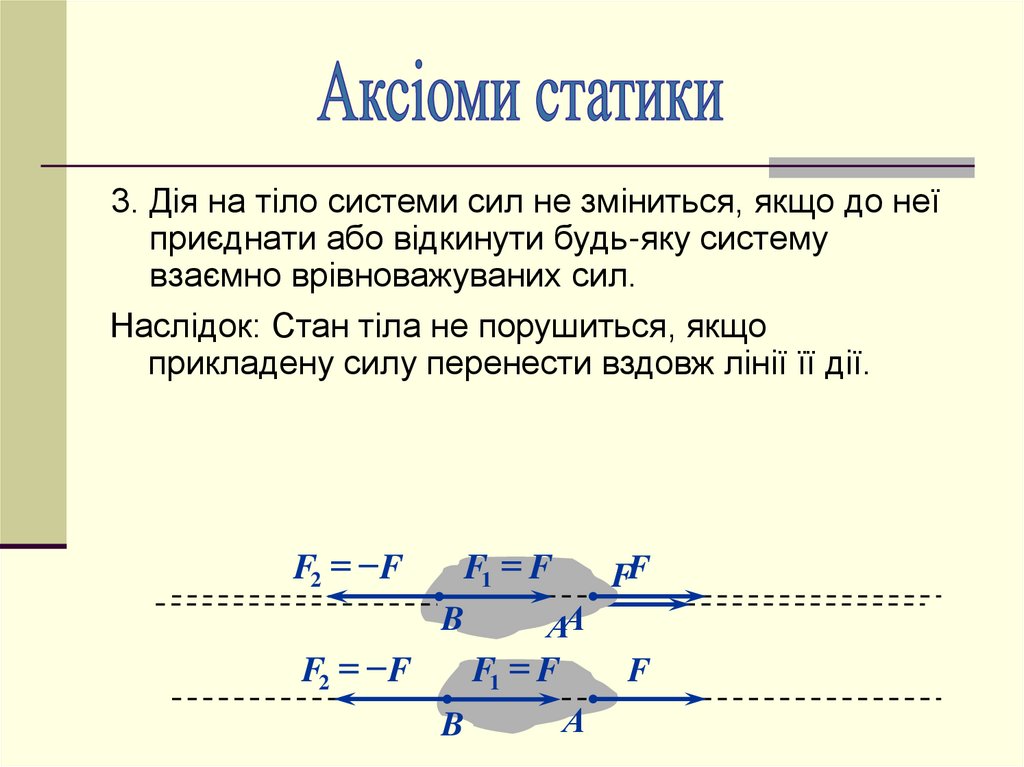
3. Дія на тіло системи сил не зміниться, якщо до неїприєднати або відкинути будь-яку систему
взаємно врівноважуваних сил.
Наслідок: Стан тіла не порушиться, якщо
прикладену силу перенести вздовж лінії її дії.
F2 = - F
F1 = F
FF
B
АА
F
F2 = - F
F1 = F
А
B
7.
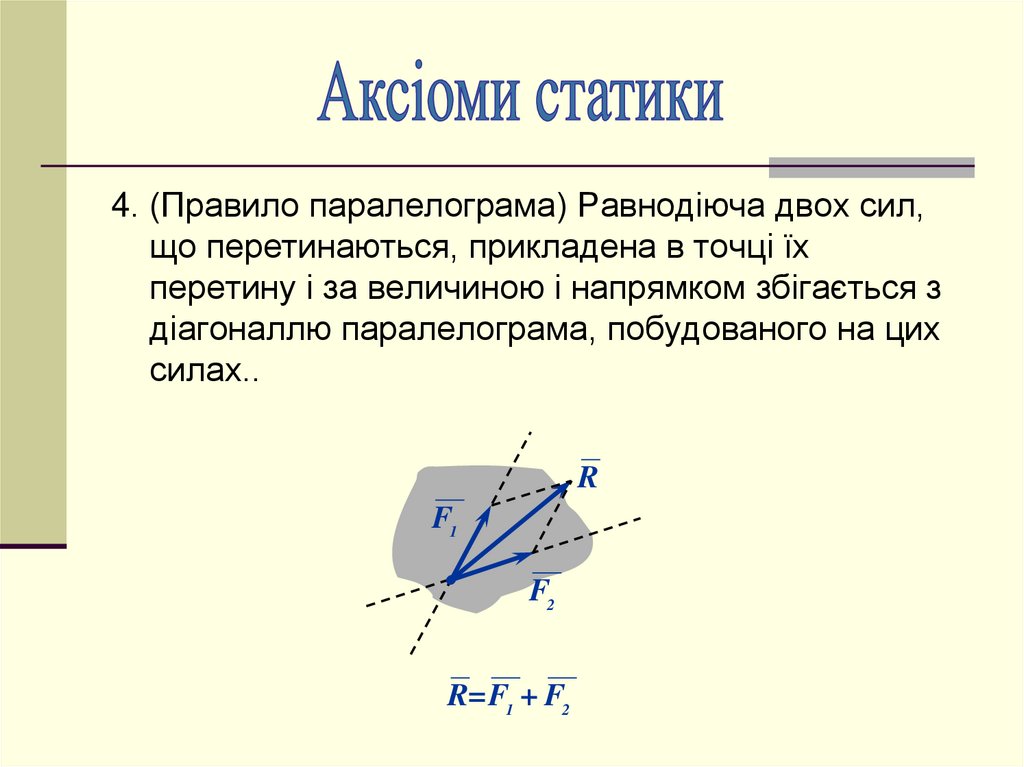
4. (Правило паралелограма) Равнодіюча двох сил,що перетинаються, прикладена в точці їх
перетину і за величиною і напрямком збігається з
діагоналлю паралелограма, побудованого на цих
силах..
R
F1
F2
R= F1 + F2
8.
5. (Закон дії та протидії) Будь-якій дії відповідаєрівна та протилежна протидія.
9.
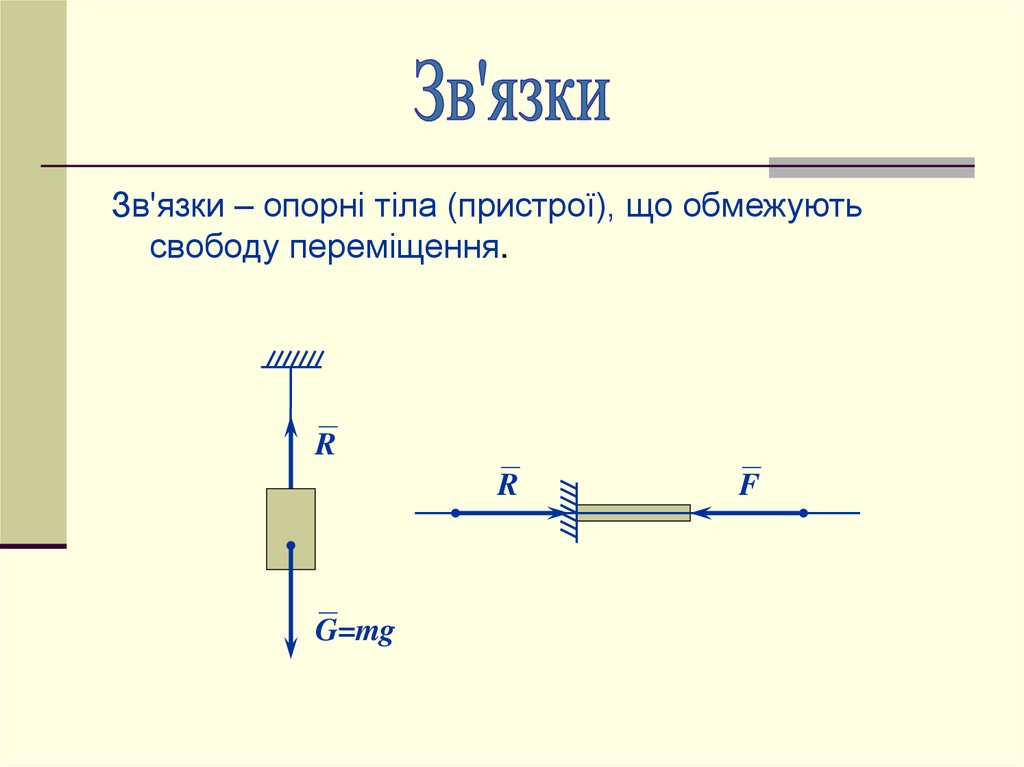
Зв'язки – опорні тіла (пристрої), що обмежуютьсвободу переміщення.
R
R
G=mg
F
10.
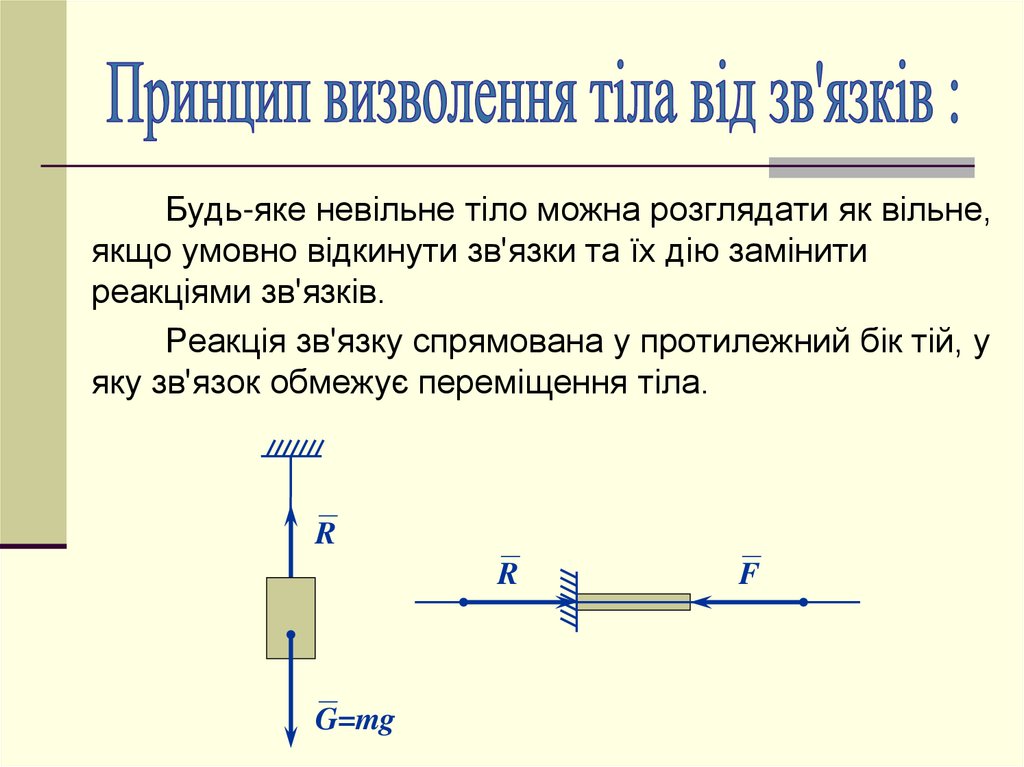
Будь-яке невільне тіло можна розглядати як вільне,якщо умовно відкинути зв'язки та їх дію замінити
реакціями зв'язків.
Реакція зв'язку спрямована у протилежний бік тій, у
яку зв'язок обмежує переміщення тіла.
R
R
G=mg
F
11.
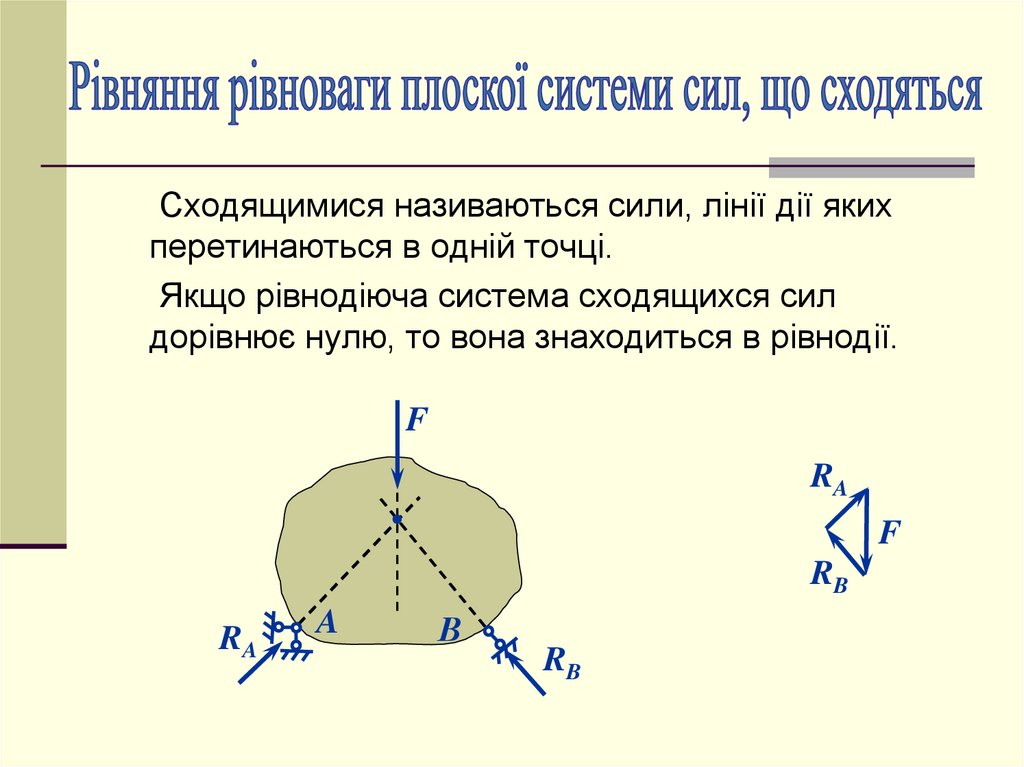
Сходящимися називаються сили, лінії дії якихперетинаються в одній точці.
Якщо рівнодіюча система сходящихся сил
дорівнює нулю, то вона знаходиться в рівнодії.
F
RA
F
RB
RA
A
В
RB
12.
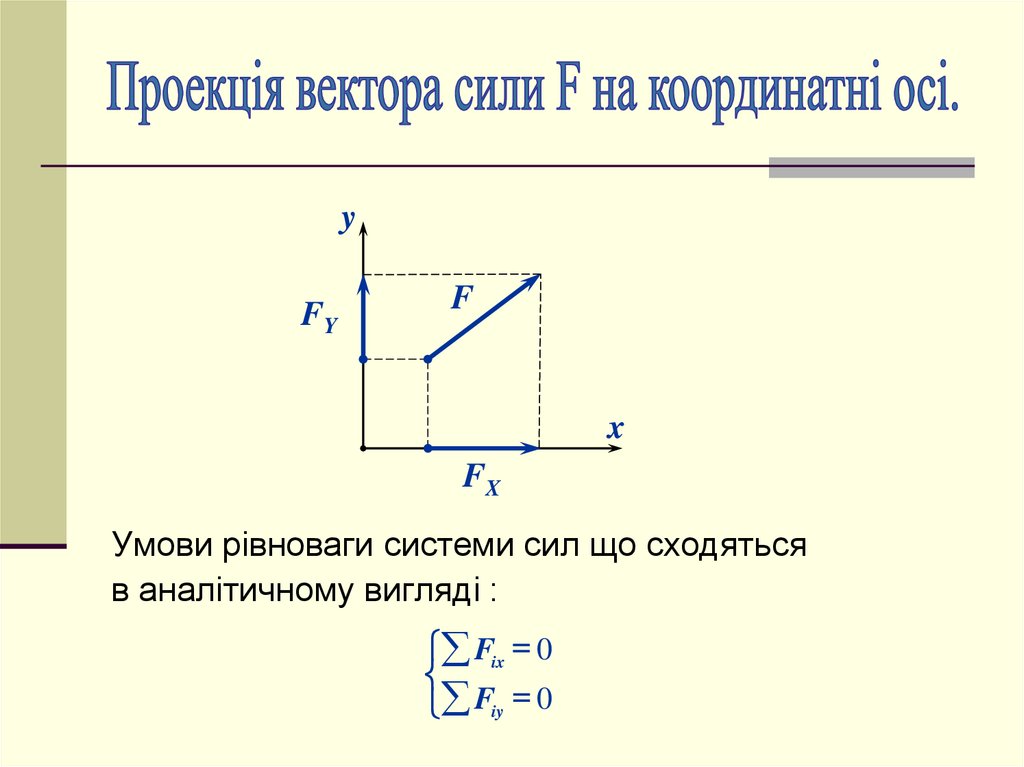
yFY
F
x
FX
Умови рівноваги системи сил що сходяться
в аналітичному вигляді :
Fix = 0
Fiy = 0
13.
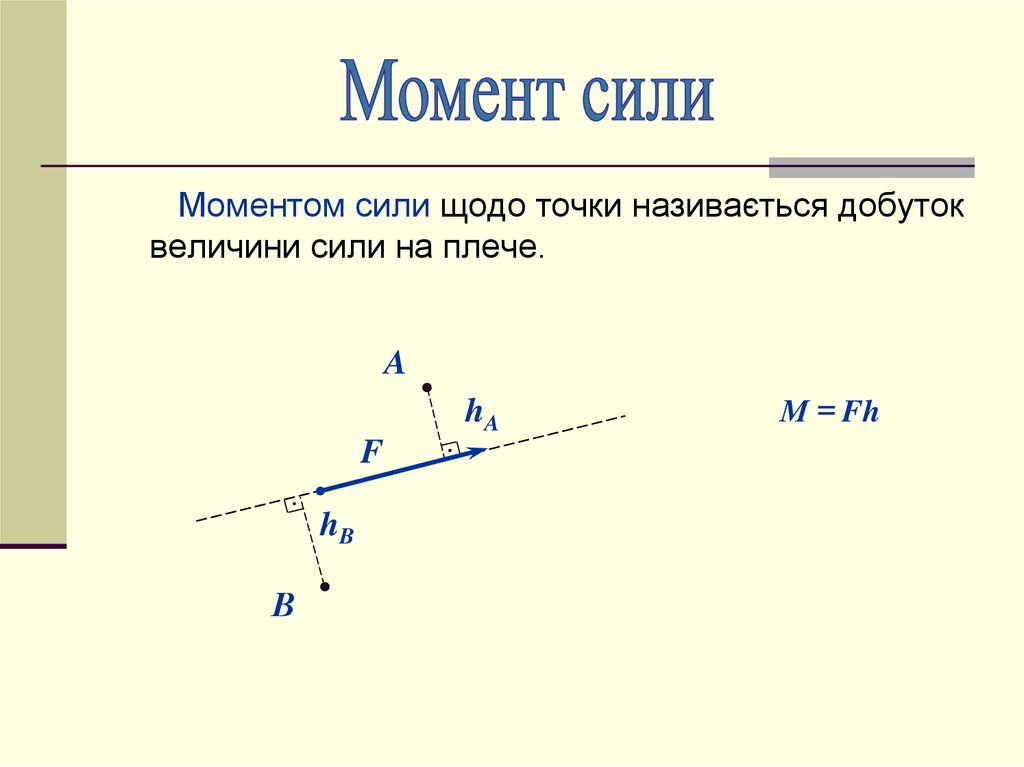
Моментом сили щодо точки називається добутоквеличини сили на плече.
A
hA
F
hB
В
М = Fh
14.
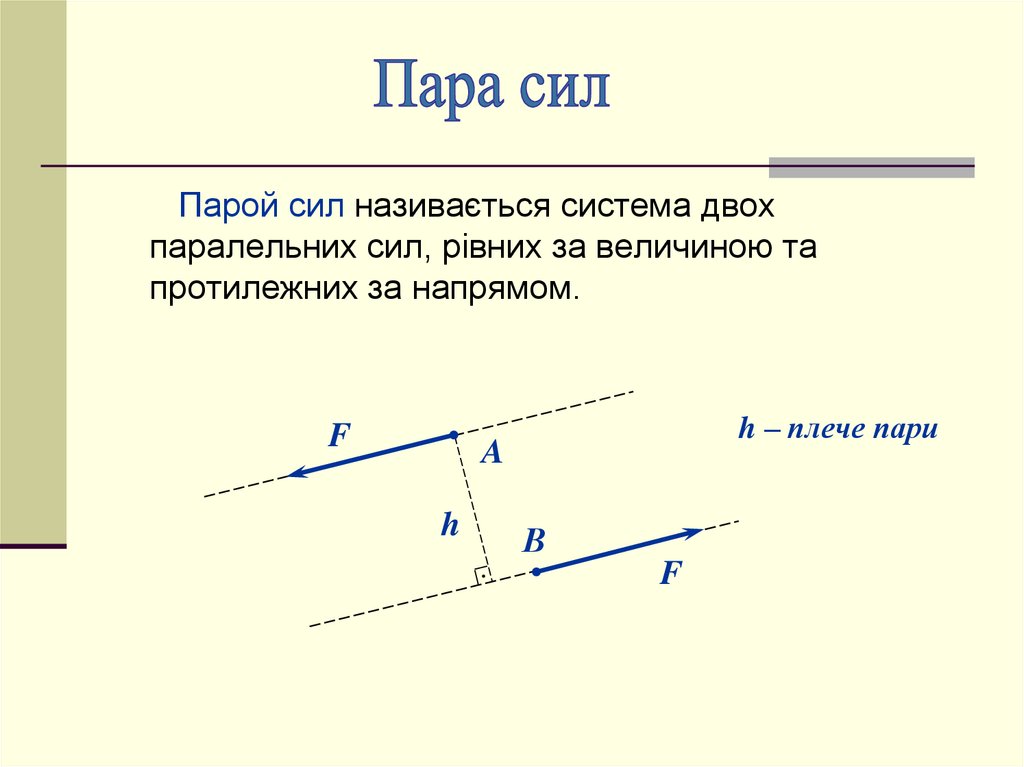
Парой сил називається система двохпаралельних сил, рівних за величиною та
протилежних за напрямом.
F
h – плече пари
A
h
В
F
15.
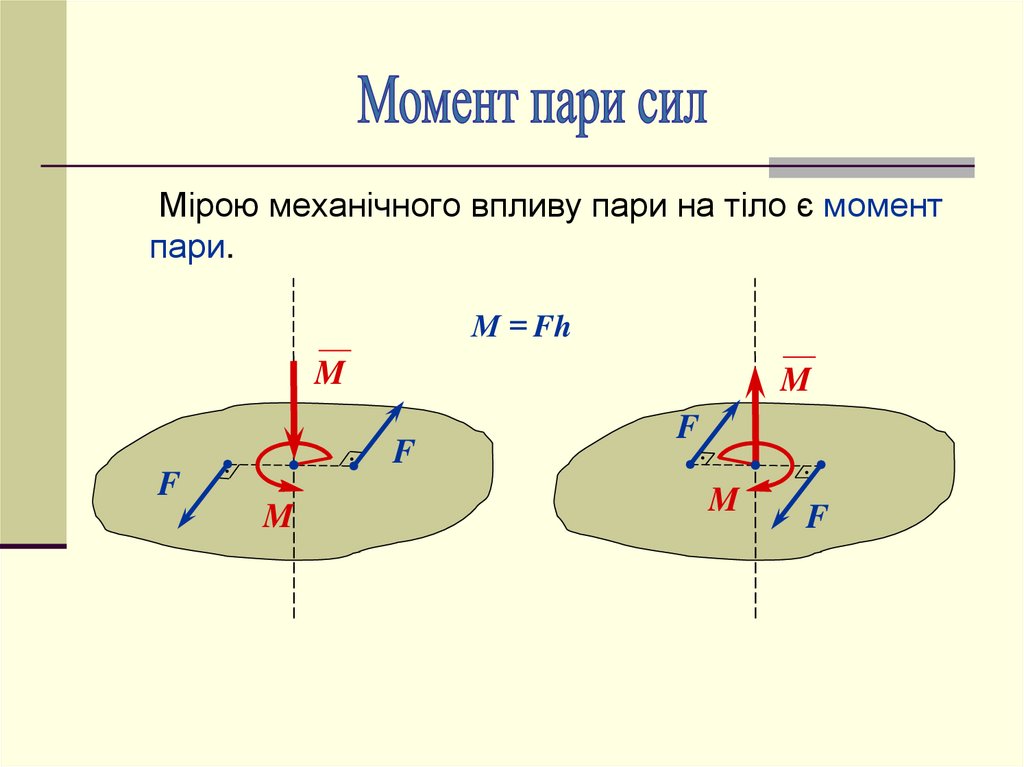
Мірою механічного впливу пари на тіло є моментпари.
М = Fh
M
M
F
F
M
F
M
F
16.
Fh
O
A
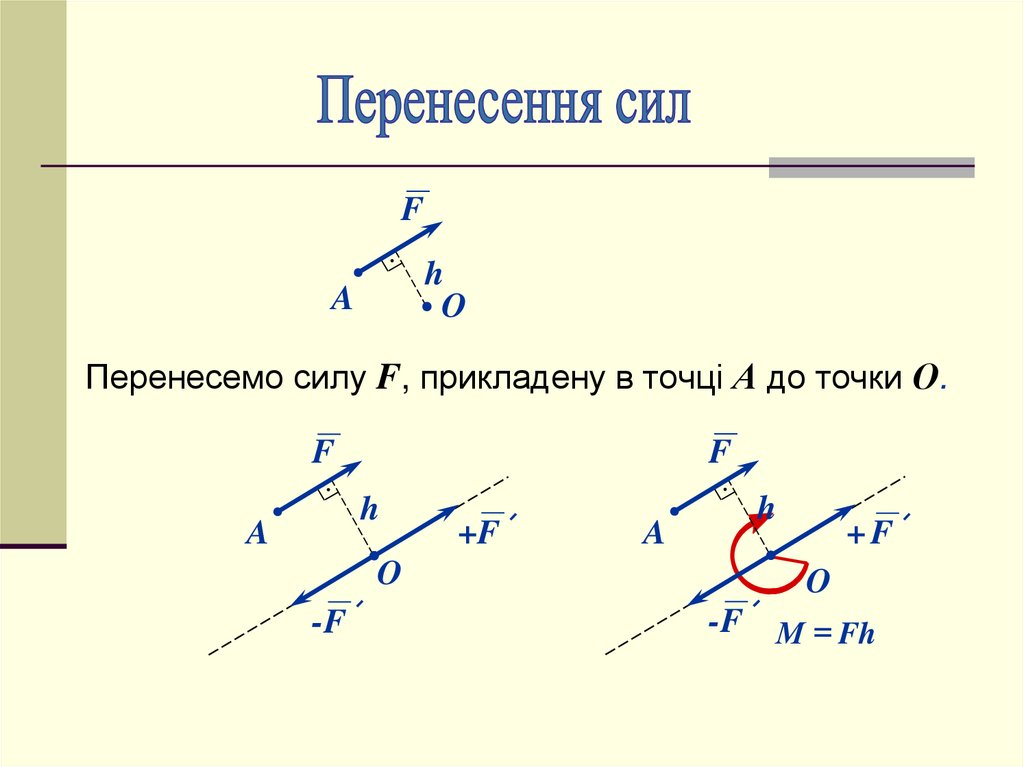
Перенесемо силу F, прикладену в точці А до точки О.
F
F
h
A
O
-F
+F
A
h
+F
O
-F М = Fh
17.
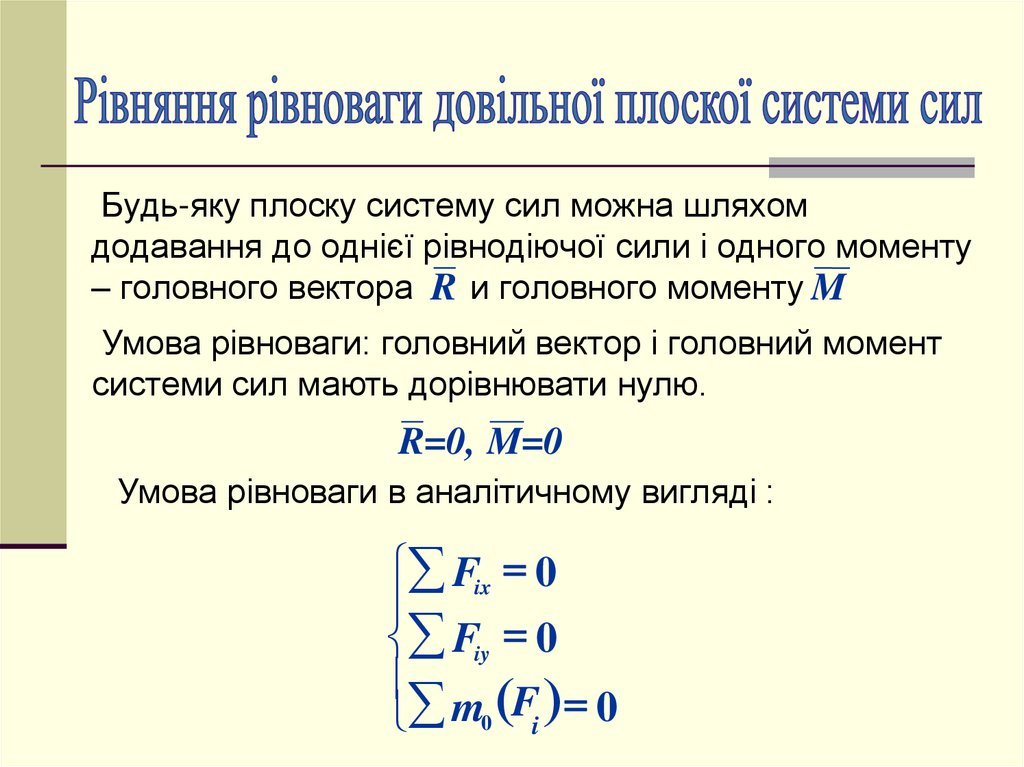
Будь-яку плоску систему сил можна шляхомдодавання до однієї рівнодіючої сили і одного моменту
– головного вектора R и головного моменту M
Умова рівноваги: головний вектор і головний момент
системи сил мають дорівнювати нулю.
R=0, M=0
Умова рівноваги в аналітичному вигляді :
Fix = 0
Fiy = 0
m0 (Fi ) = 0
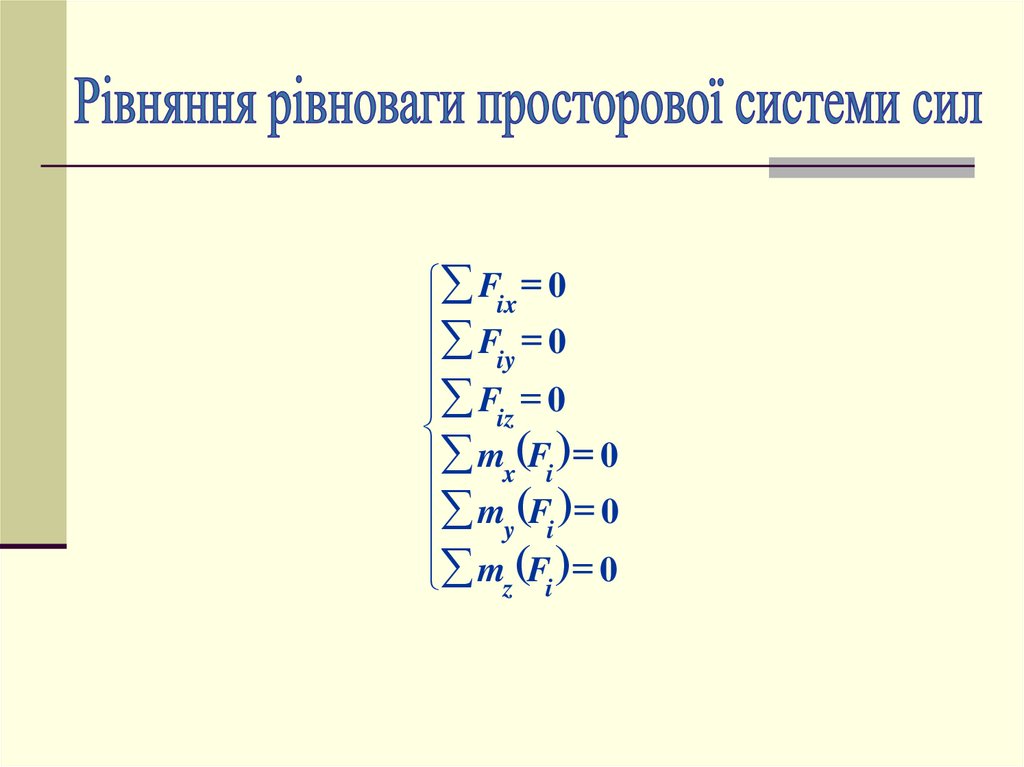
18.
Fix = 0Fiy = 0
F = 0
iz
mx(Fi ) = 0
m (F ) = 0
y i
m (F ) = 0
z i
19.
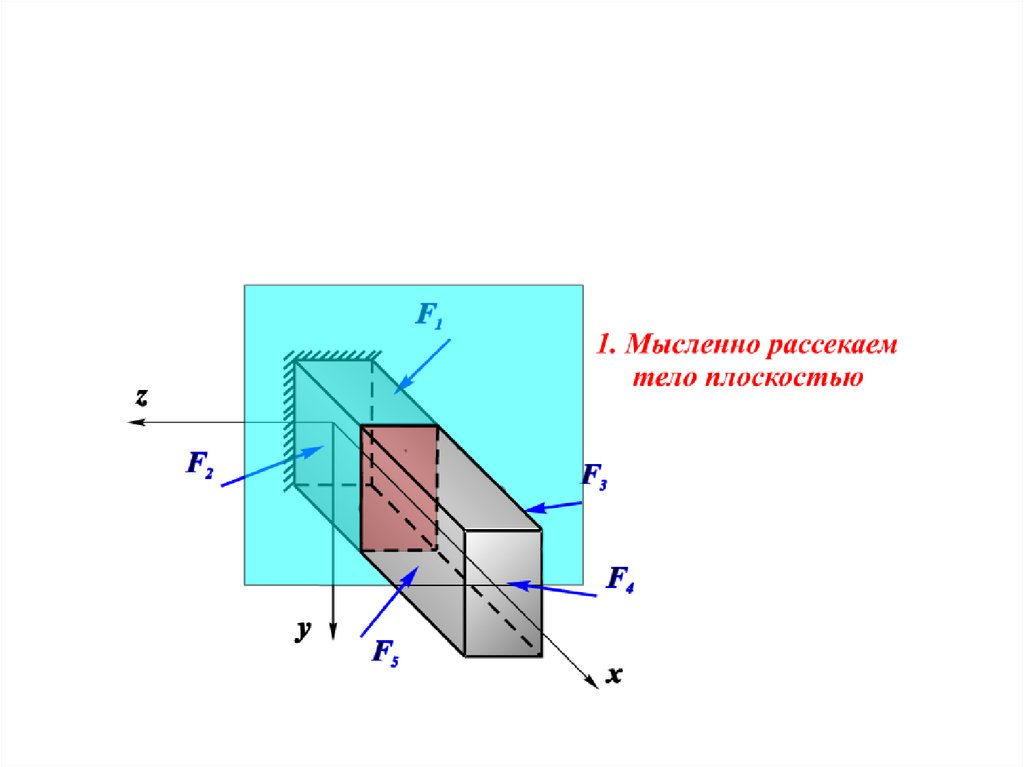
20.
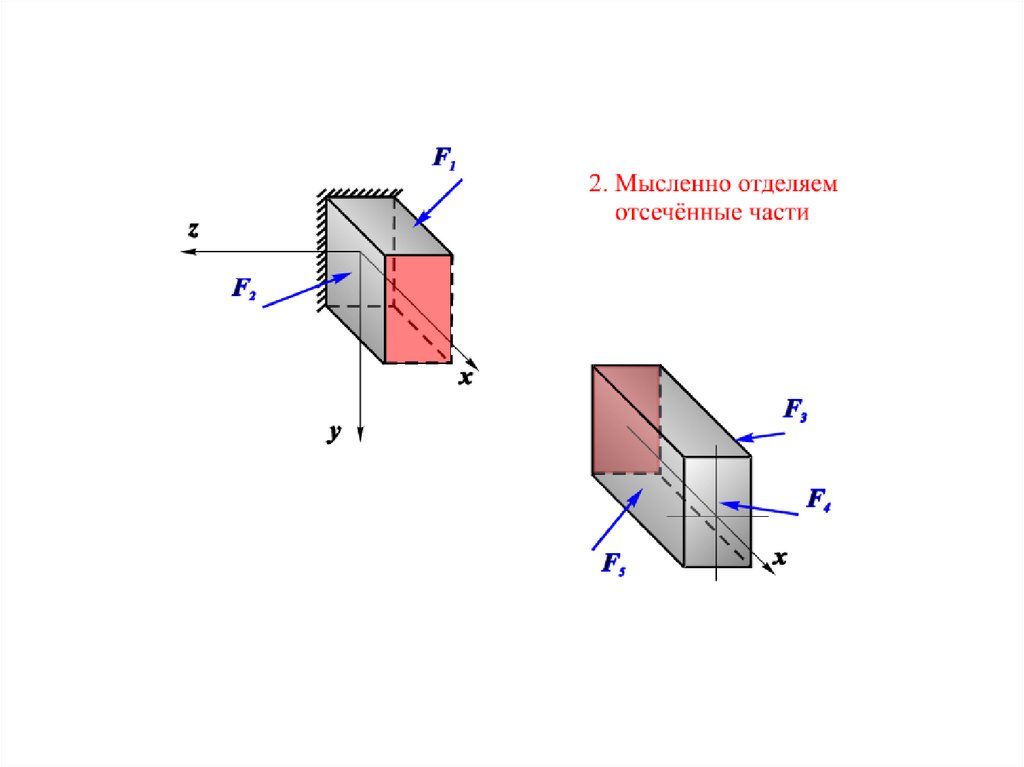
21.
22.
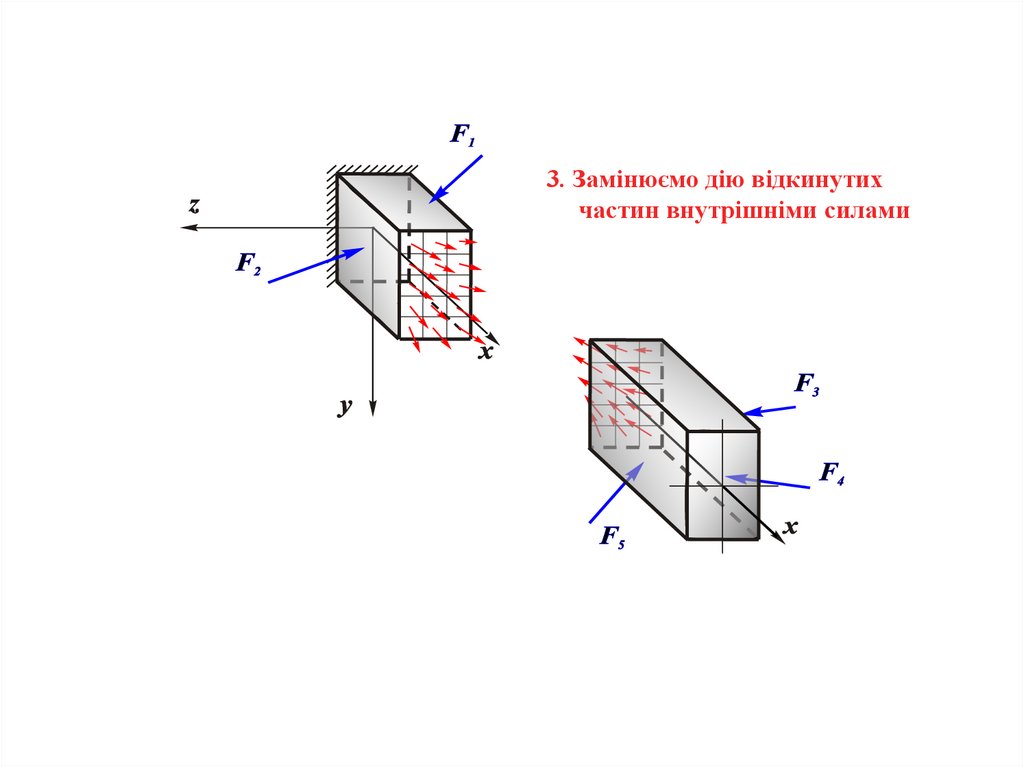
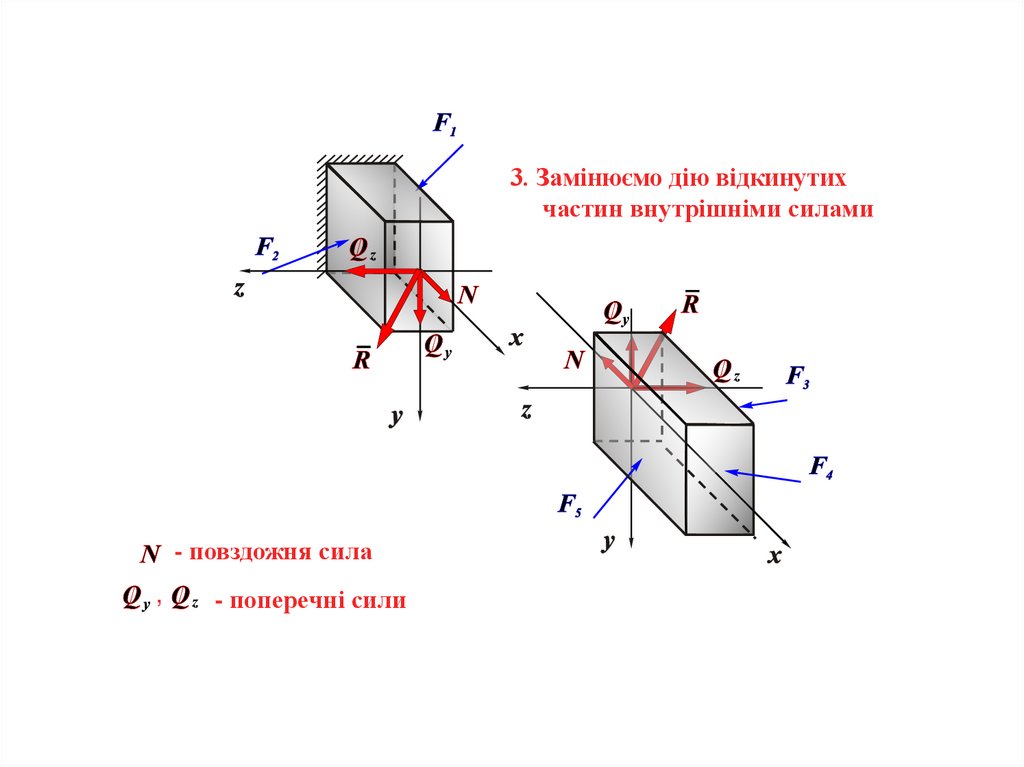
3. Замінюємо дію відкинутихчастин внутрішніми силами
23.
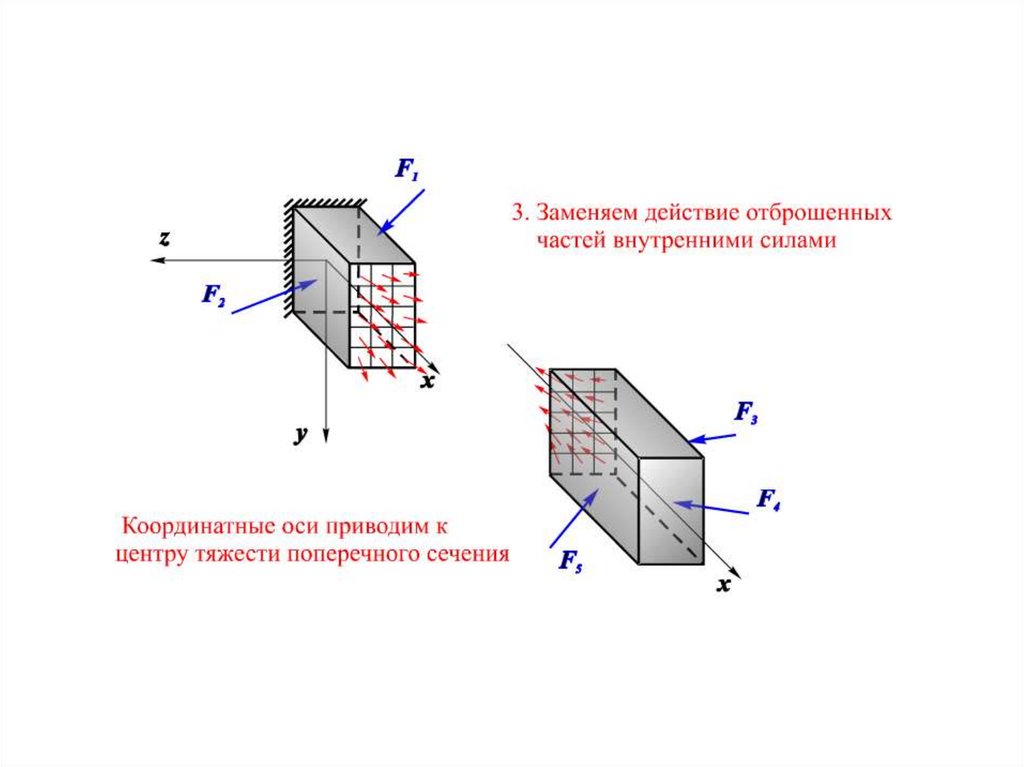
24.
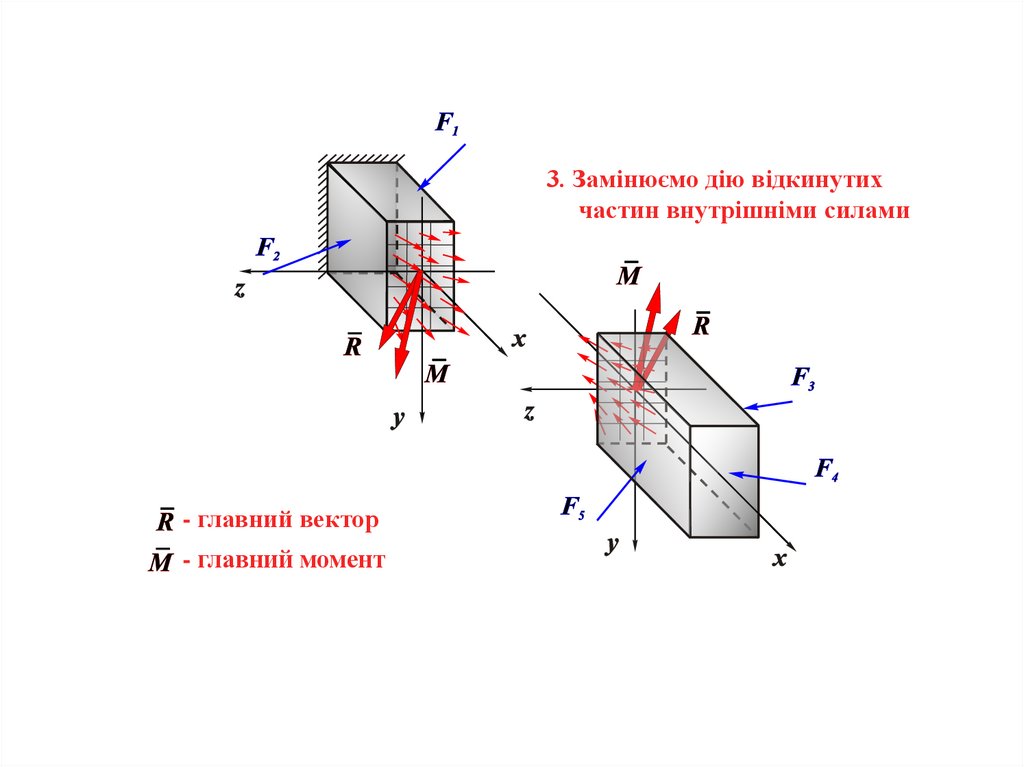
3. Замінюємо дію відкинутихчастин внутрішніми силами
- главний вектор
- главний момент
25.
3. Замінюємодію
відкинутих
3. Заменяем
действие
отброшенных
частин
внутрішніми
силами
частей
внутренними
силами
- повздожня сила
,
- поперечні сили
26.
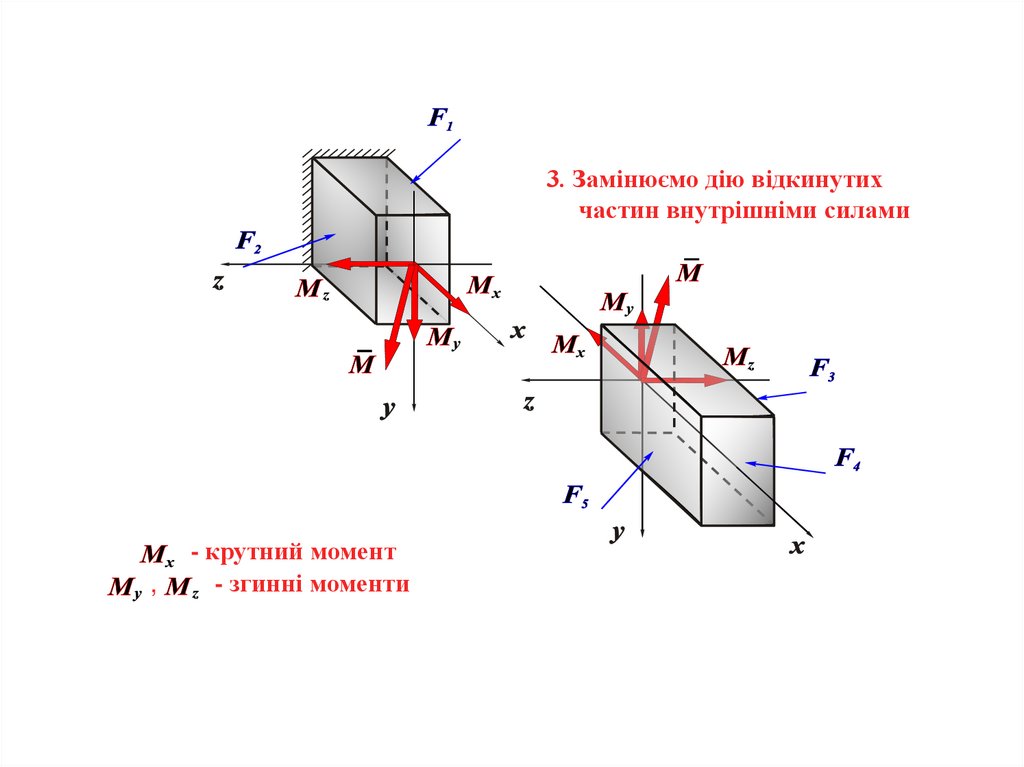
3. Замінюємо дію відкинутихчастин внутрішніми силами
,
- крутний момент
- згинні моменти
27.
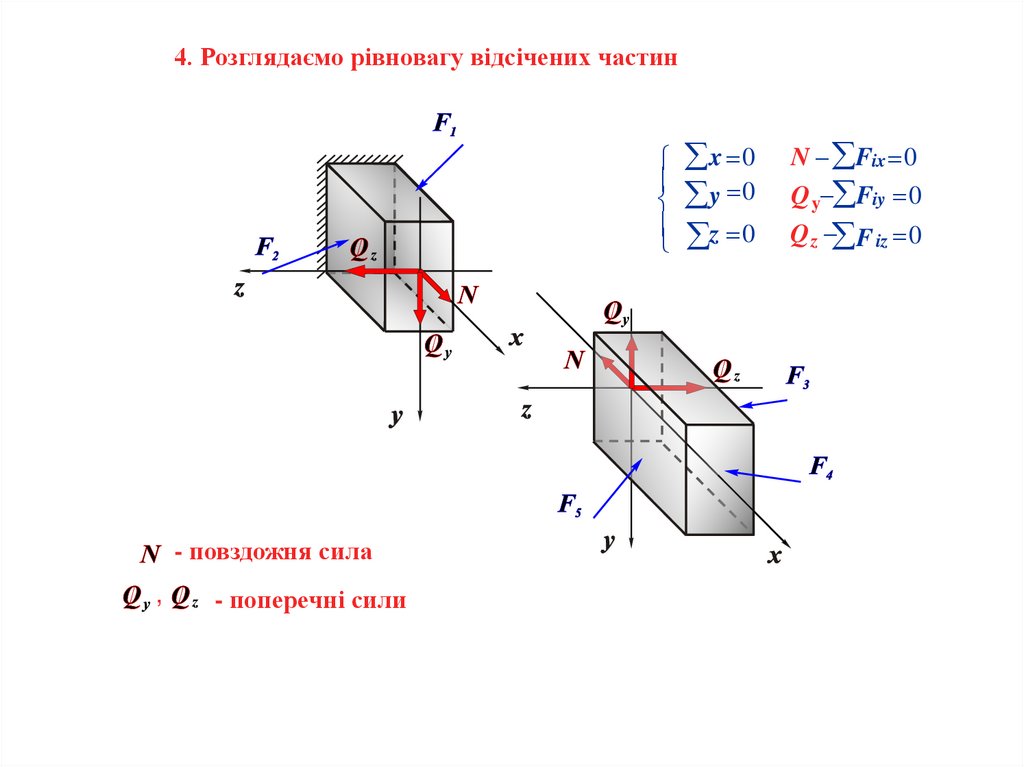
4. Розглядаємо рівновагу відсічених частинx = 0
y = 0
z = 0
- повздожня сила
,
- поперечні сили
N - Fix = 0
Q y- Fiy = 0
Q z - F iz = 0
28.
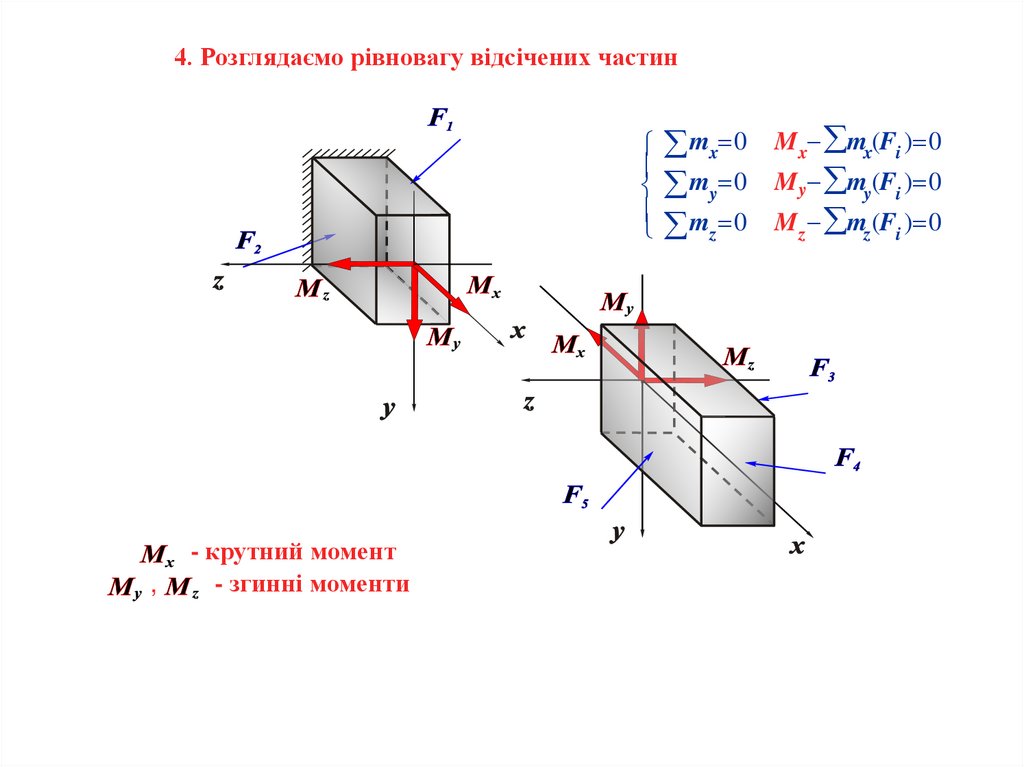
4. Розглядаємо рівновагу відсічених частинmx= 0
my= 0
m =0
z
,
- крутний момент
- згинні моменти
M x- mx(Fi )= 0
M y- my(Fi )= 0
M z - mz (Fi )= 0