



 Менеджмент
Менеджмент Промышленность
ПромышленностьПохожие презентации:










Классификация и принципы работы систем управления
1.
4 Классификация систем управленияКлассификации систем управления по классам объектов управления.
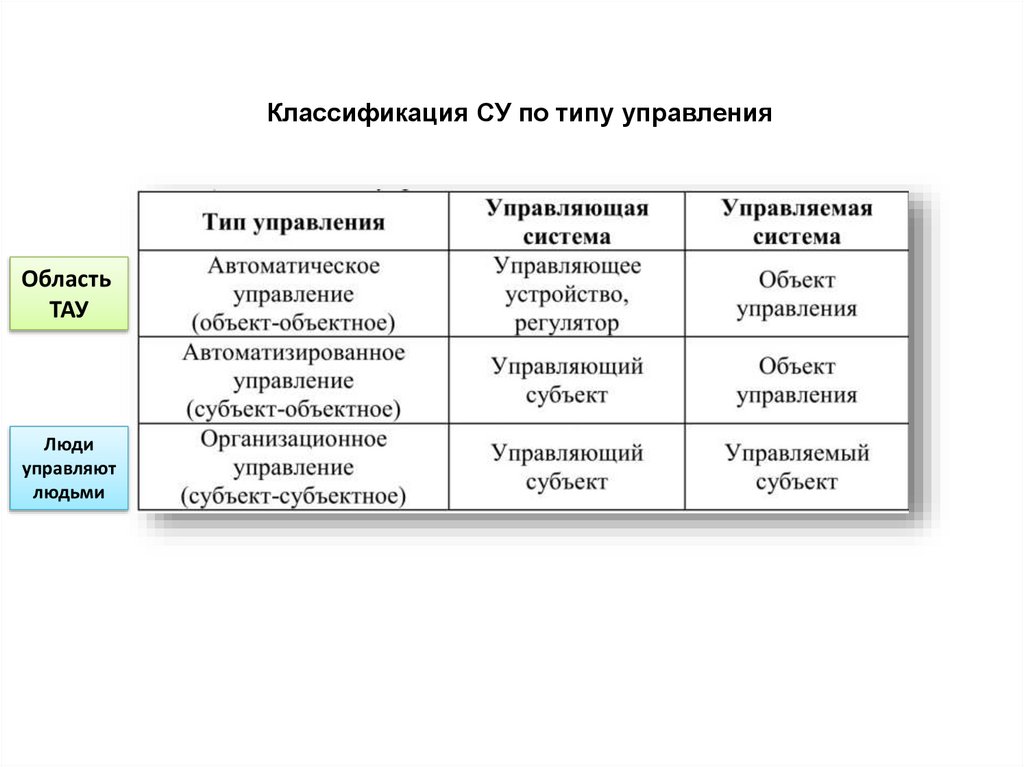
Классификации систем управления по типу управления.
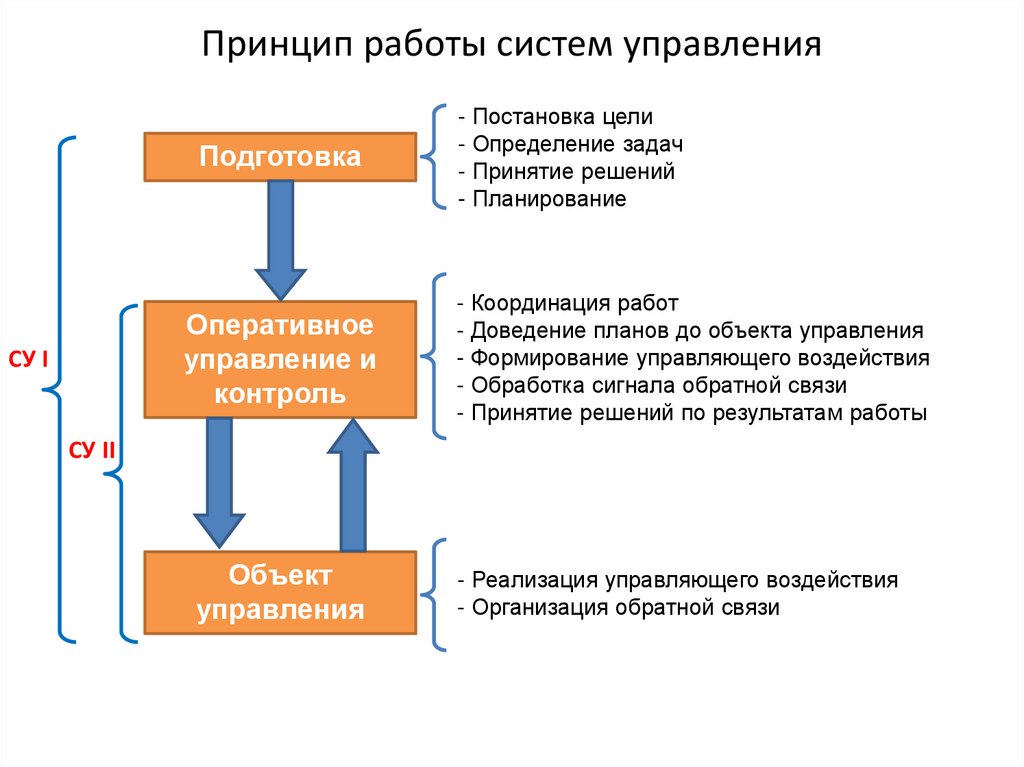
Принцип работы систем управления.
Состав модели объекта управления.
Состав общей схемы системы управления.
Назначение устройства управления.
Факторы, приводящие к неидеальности процессов управления.
Суть принципа разомкнутого управления.
Суть принципа компенсации.
Суть принципа замкнутого управления.
2.
Классификация СУ по классам объектов управления3.
Классификация СУ по типу управленияОбласть
ТАУ
Люди
управляют
людьми
4.
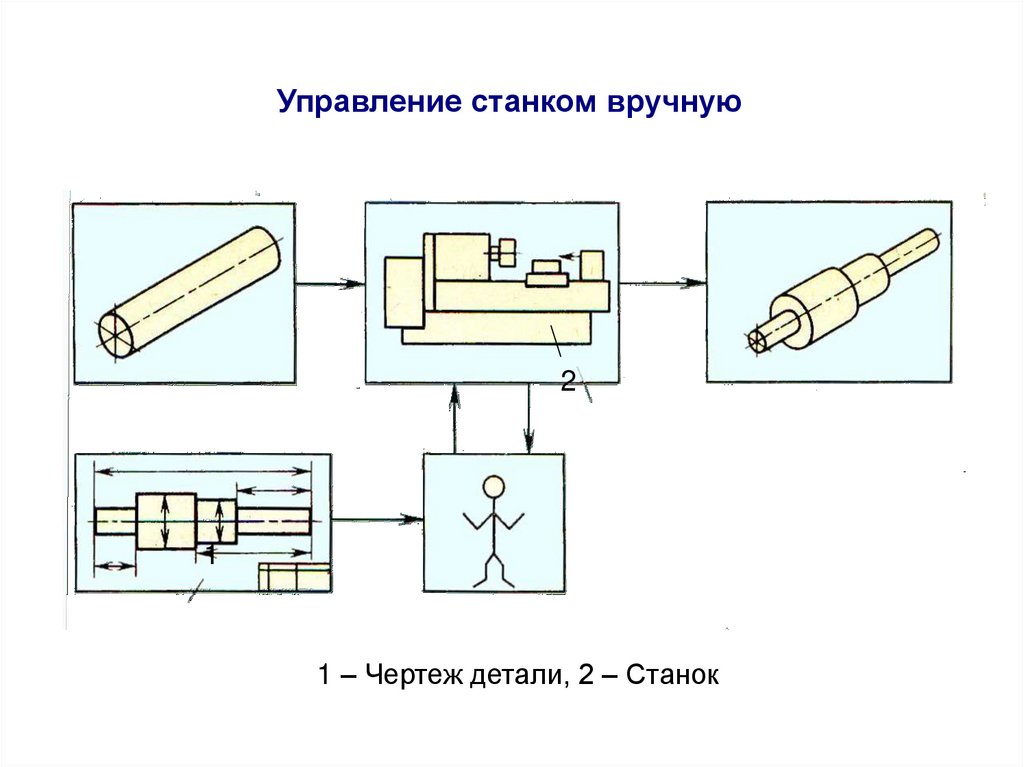
Управление станком вручную2
1
1 – Чертеж детали, 2 – Станок
5.
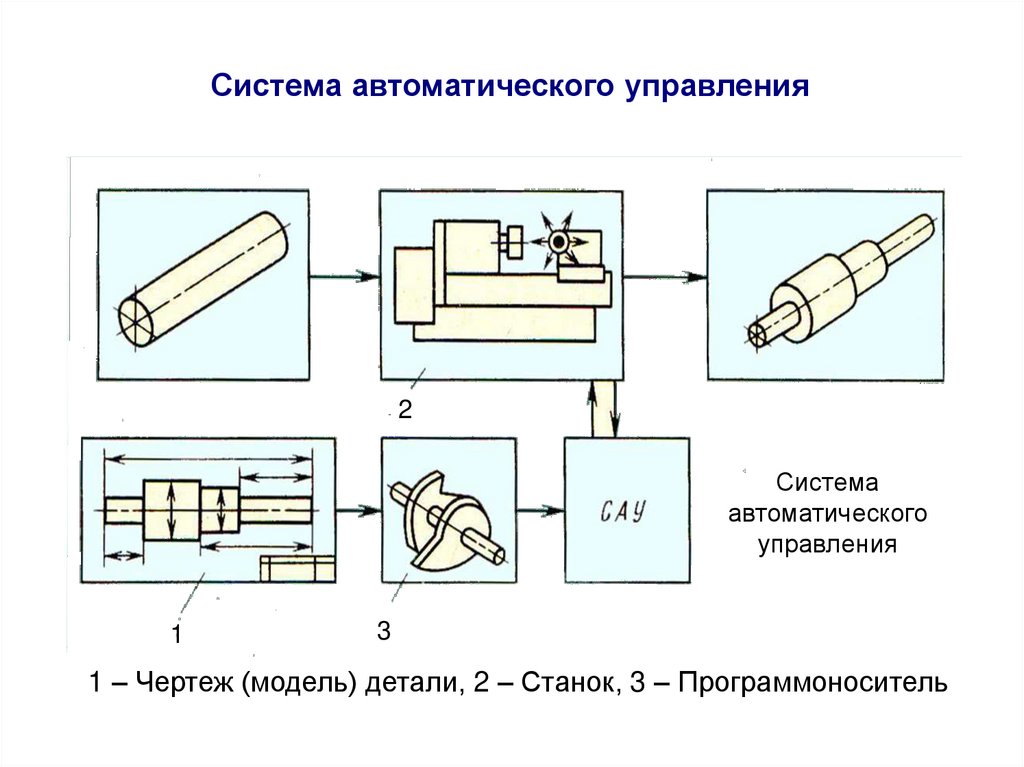
Система автоматического управления2
Система
автоматического
управления
1
3
1 – Чертеж (модель) детали, 2 – Станок, 3 – Программоноситель
6.
Принцип работы систем управленияСУ I
Подготовка
- Постановка цели
- Определение задач
- Принятие решений
- Планирование
Оперативное
управление и
контроль
- Координация работ
- Доведение планов до объекта управления
- Формирование управляющего воздействия
- Обработка сигнала обратной связи
- Принятие решений по результатам работы
Объект
управления
- Реализация управляющего воздействия
- Организация обратной связи
СУ II
7.
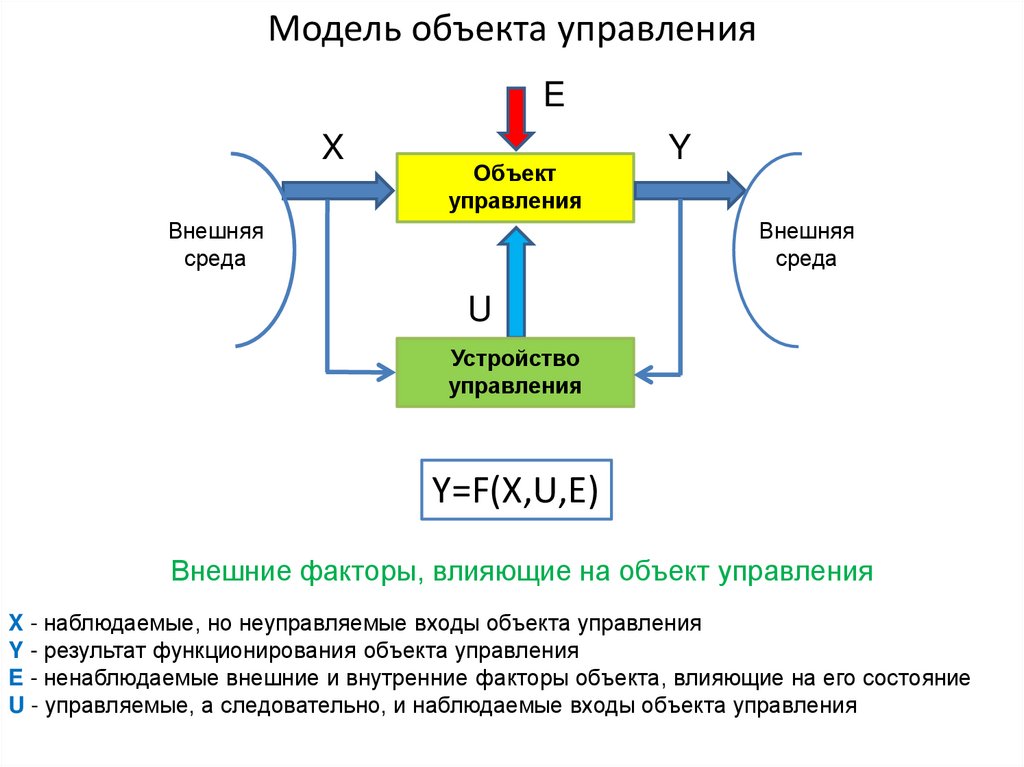
Модель объекта управленияE
X
Объект
управления
Внешняя
среда
Y
Внешняя
среда
U
Устройство
управления
Y=F(X,U,E)
Внешние факторы, влияющие на объект управления
X - наблюдаемые, но неуправляемые входы объекта управления
Y - результат функционирования объекта управления
E - ненаблюдаемые внешние и внутренние факторы объекта, влияющие на его состояние
U - управляемые, а следовательно, и наблюдаемые входы объекта управления
8.
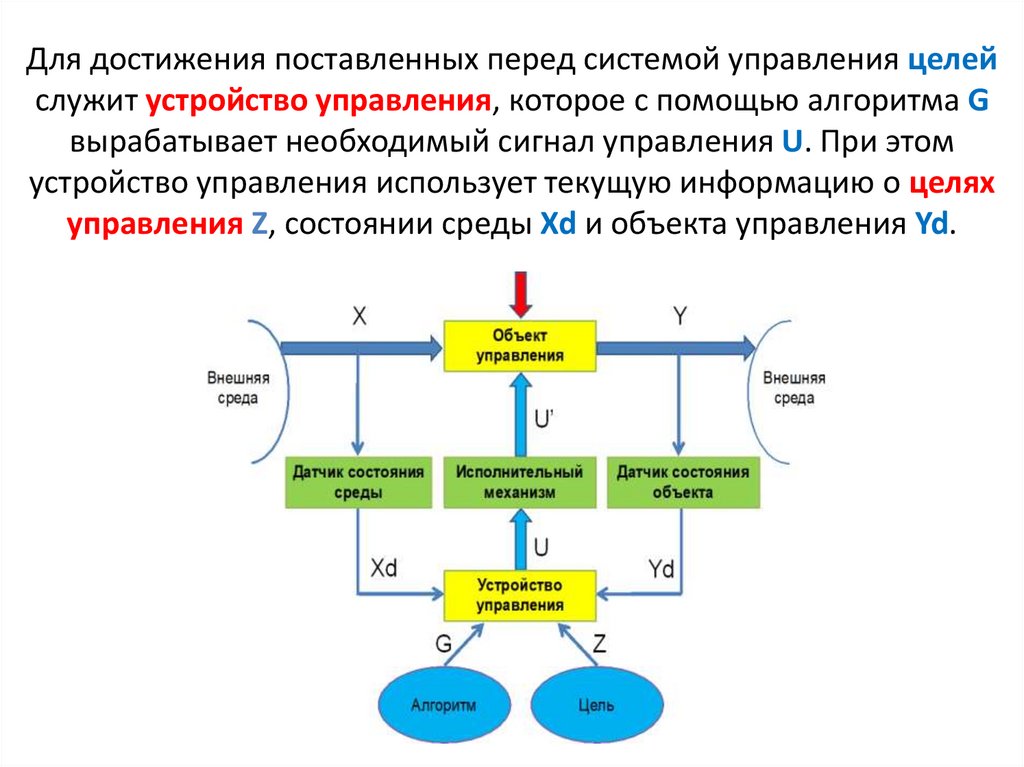
Общая схема системы управленияE
X
Y
Объект
управления
Внешняя
среда
Внешняя
среда
U’
Датчик состояния
среды
Исполнительный
механизм
Датчик состояния
объекта
U
Xd
Yd
Устройство
управления
G
Z
Алгоритм
Цель
9.
Для достижения поставленных перед системой управления целейслужит устройство управления, которое с помощью алгоритма G
вырабатывает необходимый сигнал управления U. При этом
устройство управления использует текущую информацию о целях
управления Z, состоянии среды Xd и объекта управления Yd.
10.
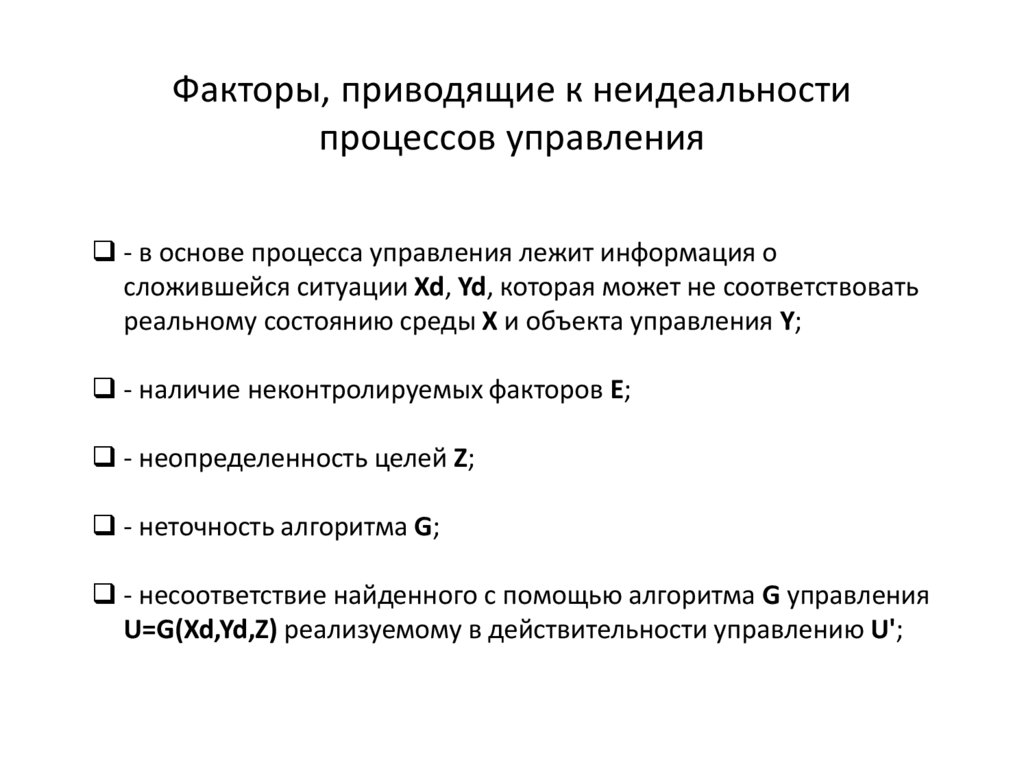
Факторы, приводящие к неидеальностипроцессов управления
- в основе процесса управления лежит информация о
сложившейся ситуации Xd, Yd, которая может не соответствовать
реальному состоянию среды X и объекта управления Y;
- наличие неконтролируемых факторов E;
- неопределенность целей Z;
- неточность алгоритма G;
- несоответствие найденного с помощью алгоритма G управления
U=G(Xd,Yd,Z) реализуемому в действительности управлению U';
11.
В зависимости от того, какая информация об объекте исреде используется в процессе управления различают
следующие принципы управления:
1) Принцип разомкнутого управления
2) Принцип компенсации
3) Принцип замкнутого управления
12.
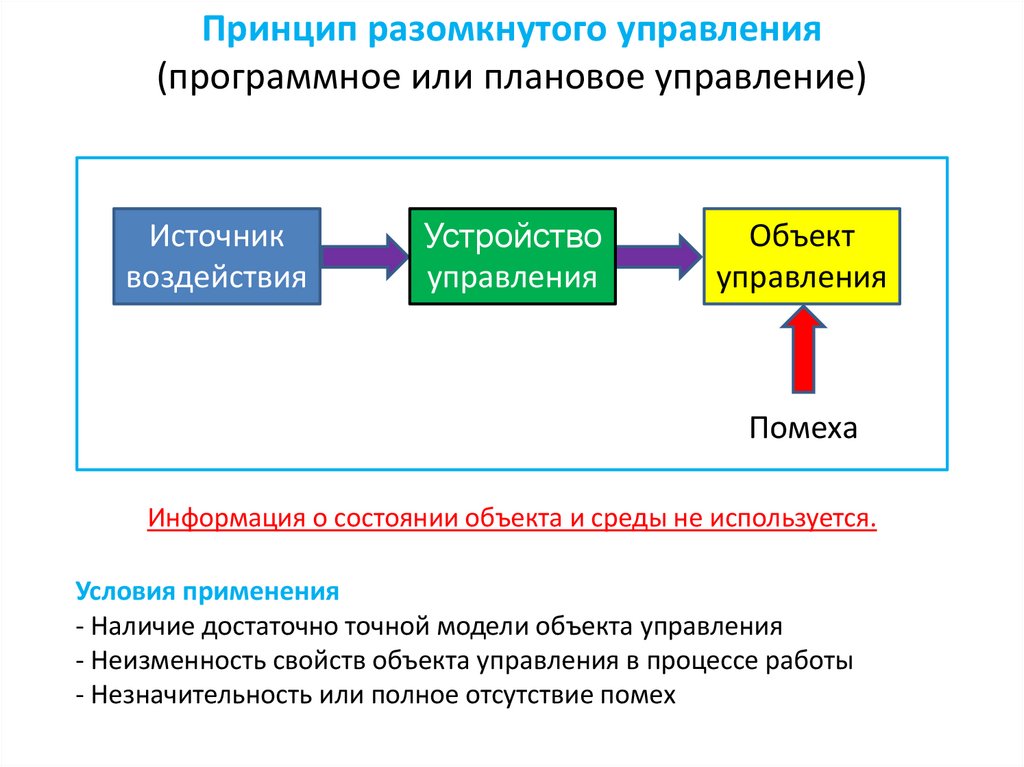
Принцип разомкнутого управления(программное или плановое управление)
Источник
воздействия
Устройство
управления
Объект
управления
Помеха
Информация о состоянии объекта и среды не используется.
Условия применения
- Наличие достаточно точной модели объекта управления
- Неизменность свойств объекта управления в процессе работы
- Незначительность или полное отсутствие помех
13.
Принцип компенсации(управление по возмущению)
Источник
воздействия
Устройство
управления
Объект
управления
Датчик
(преобразователь)
Помеха
Информация о состоянии объекта не используется.
Информация о состоянии среды используется частично.
Датчик вырабатывает сигнал, используемый для компенсации
помех, влияющих на объект управления).
Главный недостаток
Необходимость измерения или предварительного задания
возмущения, например в виде математической модели
14.
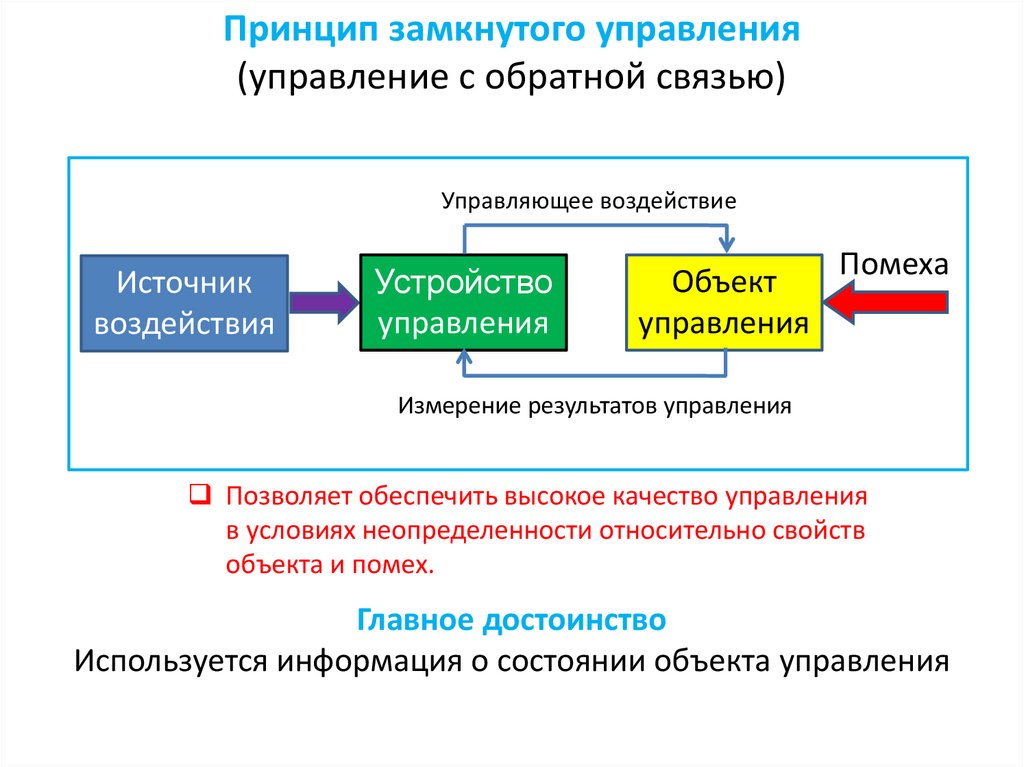
Принцип замкнутого управления(управление с обратной связью)
Управляющее воздействие
Источник
воздействия
Устройство
управления
Объект
управления
Помеха
Измерение результатов управления
Позволяет обеспечить высокое качество управления
в условиях неопределенности относительно свойств
объекта и помех.
Главное достоинство
Используется информация о состоянии объекта управления