
















 Электроника
ЭлектроникаПохожие презентации:










Конструктивные особенности и устройство БПЛА мультироторного типа
1.
2.
МультикоптерыБПЛА летающий по
вертолетный схеме, с двумя и
более моторов.
3.
Виды мультикоптеров.БиКоптер
Три-коптер
Квадрокоптер
Гексакоптер
Октокоптер
4.
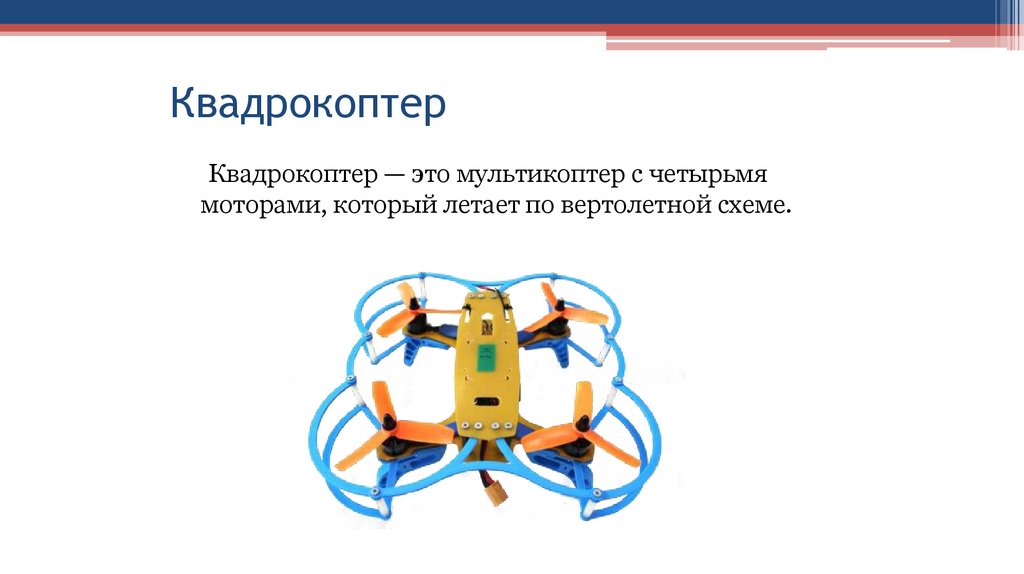
КвадрокоптерКвадрокоптер — это мультикоптер с четырьмя
моторами, который летает по вертолетной схеме.
5.
Состав квадрокоптераДвигатель
Рама - Плата распределения
питания
Регуляторы оборотов мотора - Пропеллер
- Защита для пропеллеров
Аккумулято
р-
Полетный контроллер - Приемник радиосигнала
6.
Полетный контроллер.Полетный контроллер —это мозг
вашего дрона. Он определяет
состояние вашего летательного
аппарата, опрашивая массив
датчиков сотни раз в секунду, а
затем вносит микроскопические
мгновенные изменения в работу
каждого двигателя, чтобы
обеспечить стабильное положение
дрона в воздухе.
7.
Направления вращения двигателей квадрокоптера.CW- по часовой
стрелке.
CCW-против
часовой
стрелки.
8.
Пульт управленияБПЛА (передатчик).
Два главных джойстика являются наиболее
важными органами управления и всегда
занимают четыре канала, по одному на каждую ось
перемещения.
9.
Принцип действия электронныхкомпонентов.
10.
Плата распределения питания (PDB).Плата распределения питания отвечает за прием
электропитания от аккумулятора и его распределение среди
всех электронных компонентов квадрокоптера.
11.
Аккумулятор.Химический источник тока многоразового действия.
12.
Характеристики аккумулятора.1.
Ёмкость
2.
Токоотдача
3.
Напряжение
4.
Количество ячеек
13.
Приемник радиосигналаПриемник радиосигнала
необходим для приема
управляющего сигнала,
исходящего от пульта
управления.
14.
Двигатели.коллекторные и бесколлекторные.
15.
Коллекторный двигатель.Преимущества:
• Маленький вес и
размер
• Низкая
стоимость
•Прост в ремонте
Недостатки:
• Перегрев
• Быстрый износ
• Низкий КПД
• Низкая скорость
вращения
16.
Бесколлекторный двигатель.Преимущества
• Высокая скорость
вращения
• Износостойкость
• Защищённость от
внешних
воздействий
Недостатки
• Стоимость
• Сложный ремонт
17.
Характеристики электродвигателя.1.
2.
3.
4.
5.
6.
7.
Мощность (потребляемая).
Вес.
Энергоэффективность (КПД).
Температура нагрева в работе.
Балансировка и уровень вибрации.
Тяга.
KV.
18.
Регуляторы оборотов (ESC).Представляют собой небольшие электронные устройства,
предназначенные для управления скоростью и направлением
вращения каждого двигателя квадрокоптера.
19.
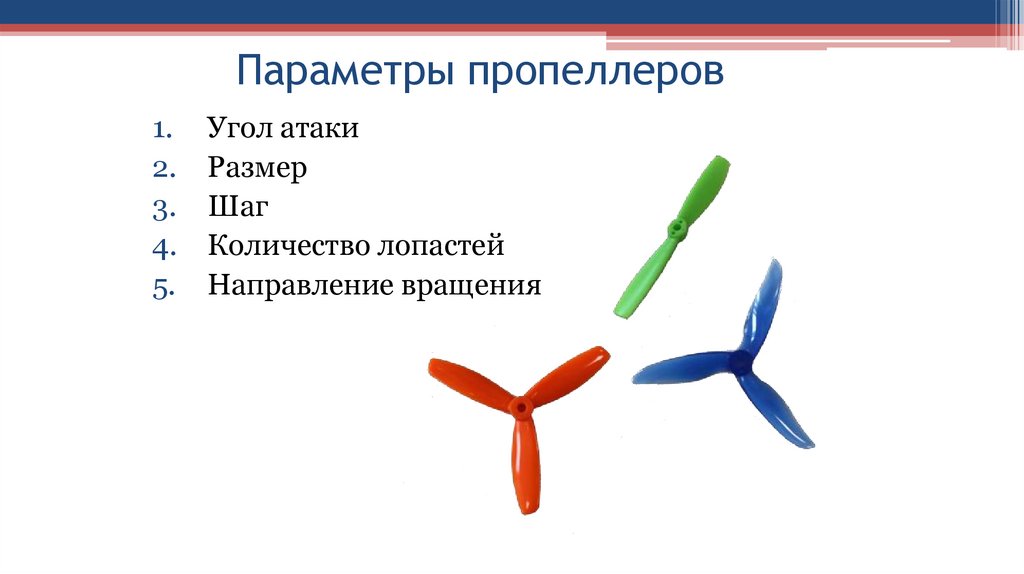
Параметры пропеллеров1.
2.
3.
4.
5.
Угол атаки
Размер
Шаг
Количество лопастей
Направление вращения
20.
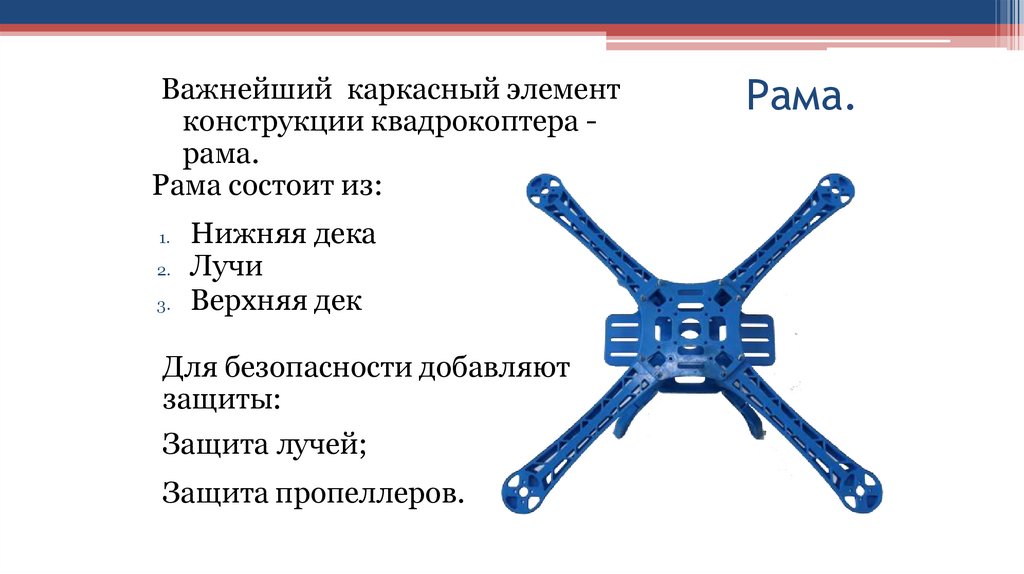
Важнейший каркасный элементконструкции квадрокоптера рама.
Рама состоит из:
Нижняя дека
2. Лучи
3. Верхняя дек
1.
Для безопасности добавляют
защиты:
Защита лучей;
Защита пропеллеров.
Рама.