







 Электроника
ЭлектроникаПохожие презентации:










Мультироторные системы
1.
Детский технопарк «Кванториум»Мультироторные
системы
Липецк 2017 г.
2.
Строение мультикоптераМультикоптер - это летательный аппарат с произвольным количеством несущих винтов,
вращающихся диагонально в противоположных направлениях.
В основном мультикоптер состоит из:
Рамы.
Полётного контроллера.
Мотора.
Регуляторов скорости (ESC).
Аккумуляторов.
Винтов.
Пульта радиоуправления.
Радиоприемника.
3.
Что это?Винты
Аккумулятор
4.
Что это?Полётный контроллер
Рама
5.
Что это?Пульт радиоуправления
Мотор
6.
Что это?Регулятор скорости
Радиоприемник
7.
Конфигурации мультикоптераКонфигурации:
1. Трикоптер
3. Квадрокоптер
2. Гексокоптер
4. Октокоптер
Самый простой из них в сборке и управлении, это квадрокоптер, то есть
мультироторная платформа с четырьмя двигателями. В свою очередь
квадрокоптер может иметь «+» и «х» конфигурацию. У «+»-коптера один из
лучей направлен вперед, у «х»-платформ основное направление находится
между двумя соседними лучами.
8.
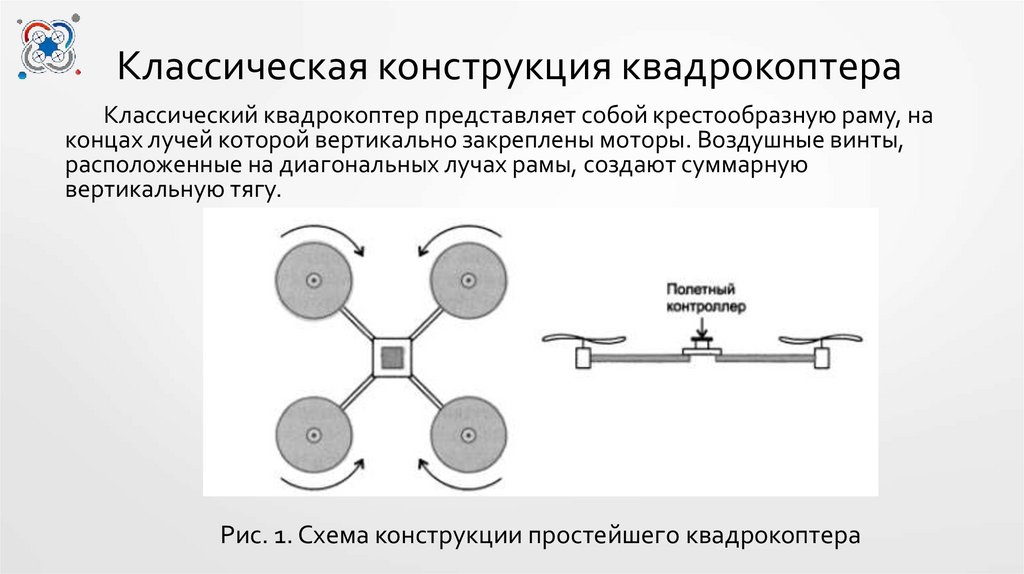
Классическая конструкция квадрокоптераКлассический квадрокоптер представляет собой крестообразную раму, на
концах лучей которой вертикально закреплены моторы. Воздушные винты,
расположенные на диагональных лучах рамы, создают суммарную
вертикальную тягу.
Рис. 1. Схема конструкции простейшего квадрокоптера
9.
Принципы полёта1. Синхронно регулируя
обороты моторов,
можно заставить
квадрокоптер
подниматься вверх,
зависать или опускаться.
2. Если изменить обороты
моторов неравномерно,
то квадрокоптер
отклонится от
горизонтального
положения и полетит в
сторону отклонения.
10.
Принципы полёта3. Вращающиеся винты создают реактивный крутящийся
момент, который старается развернуть квадрокоптер в
сторону, противоположную вращению винта.
4. Если увеличить обороты моторов, вращающихся по часовой
по часовой стрелке, и в равной мере уменьшить обороты у
вращающихся против часовой стрелки, то рама начнет
поворачиваться против часовой стрелки.
5. Оборотами мотора управляет полётный контроллер. Он
опрашивает встроенные гироскопы, акселерометры,
барометр, сигналы от приемника радиоуправления и на
основе полученных данных рассчитывает управляющие
сигналы для каждого из моторов в отдельности.
11.
Достоинства квадрокоптеров• Простота конструкции и низкая стоимость ущерба при
аварии.
o Квадрокоптеры держатся в воздухе только за счет несущих
пропеллеров.
o Можно разбить почти полностью и восстановить за один
выходной день.
• Простота управления и обучения.
o Квадрокоптер довольно стабилен в воздухе.
o Управление квадрокоптером интуитивно более понятно и
легче осваивается.
• Простота самостоятельного изготовления.
• Возможности для творчества.
12.
Недостатки квадрокоптеров• Полное отсутствие летучести
Квадрокоптер хорошо летает, только пока полностью
исправен.
• Высокий порог знаний
Понимание радиосхем, умение паять, прошивать микросхемы
и т.д.
• Низкая динамика и управляемость
Обратная сторона стабильности квадрокоптеров – вялость и
инертность в управлении.