



 Физика
ФизикаПохожие презентации:
")
")





")


Жазыќ механизмдерді кинематикалыќ зерттеу. (Дјріс 3)
1. Дјріс 3 Жазыќ механизмдерді кинематикалыќ зерттеу
Дәріс 3Жазық механизмдерді
кинематикалық зерттеу
1. Жазық механизмдерді кинематикалық зерттеу
әдістері.
2. Жоспарлар (графо-аналитикалық) әдісі.
3. Жазық механизмнің кинематикалық талдауы.
Жылдамдықтар жоспары.
1
2.
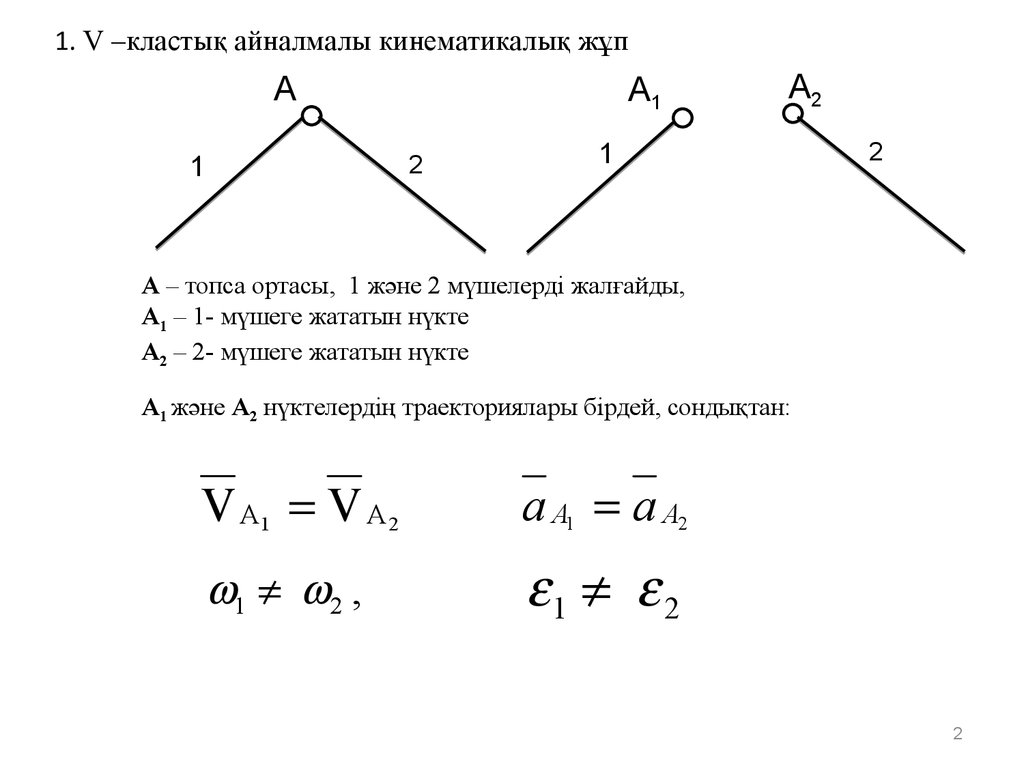
1. V –кластық айналмалы кинематикалық жұпА
А1
2
1
А2
1
2
А – топса ортасы, 1 және 2 мүшелерді жалғайды,
А1 – 1- мүшеге жататын нүкте
А2 – 2- мүшеге жататын нүкте
А1 және А2 нүктелердің траекториялары бірдей, сондықтан:
V A1 V A 2
a A1 a A2
1 2 ,
1 2
2
3. 2. V кластыќ ілгерлемелі кинематикалыќ жўп
2. V кластық ілгерлемелі кинематикалық жұпВ
3
В3
В4
3
4
4
В3, В4 – 3 және 4 мүшелерге жататын нүктелер.
VВ3 VВ4 ,
аВ3 аВ4
3 4 ,
3 4 .
3
4.
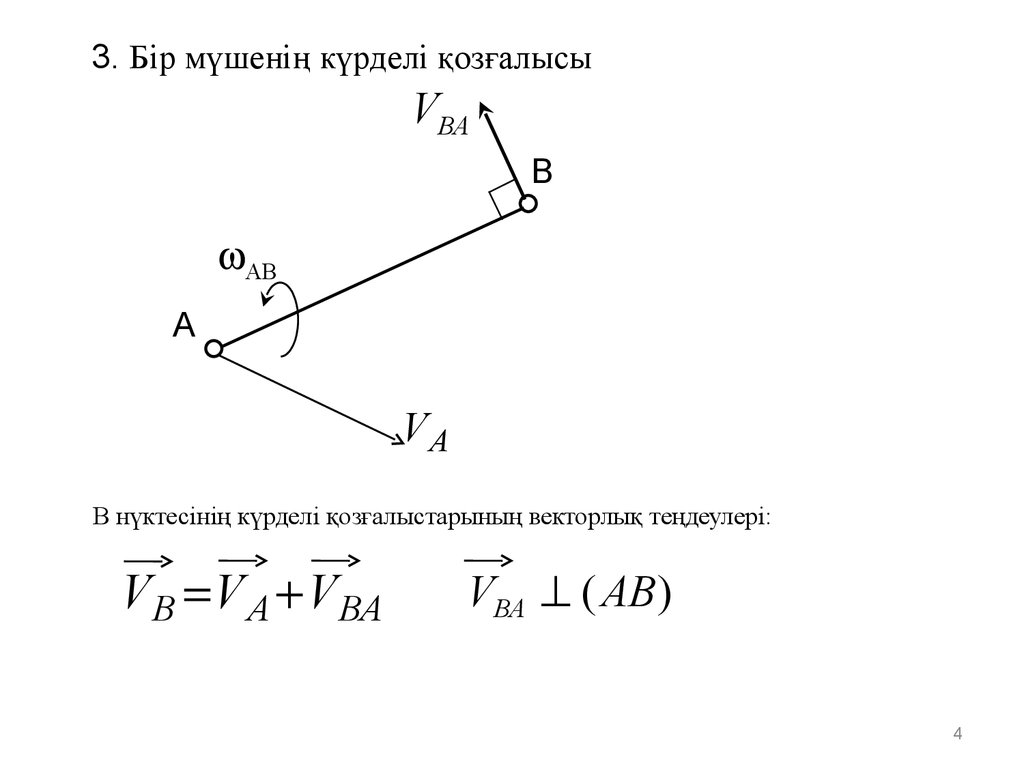
3. Бір мүшенің күрделі қозғалысыVВА
В
АВ
А
VА
В нүктесінің күрделі қозғалыстарының векторлық теңдеулері:
V В V А V ВА
VВА ( АВ )
4
5. 4. Ілгерлемелі жўпта тасымалды ќозєалыс айналмалы болса
4. Ілгерлемелі жұпта тасымалды қозғалыс айналмалы болсаVA3 A2
S A3 A2
В
А2
А
2
2
3
3
А3
VA2
3
3
В
VА3 В
3
А3 нүктесінің кинематикалық параметрлері 2 мүшемен бірге (тасымалды) айналыс
және оның бойымен ілгермелі (салыстырмалы) қозғалыстардың қосындысы
болғандықтан, мына формуланы жазамыз:
V А3 V А2 V А3 А2
VA3 A2 (ВА)
V А3 V В V А3В
VА3 В ( ВА)
5
6.
А1
1
2
в
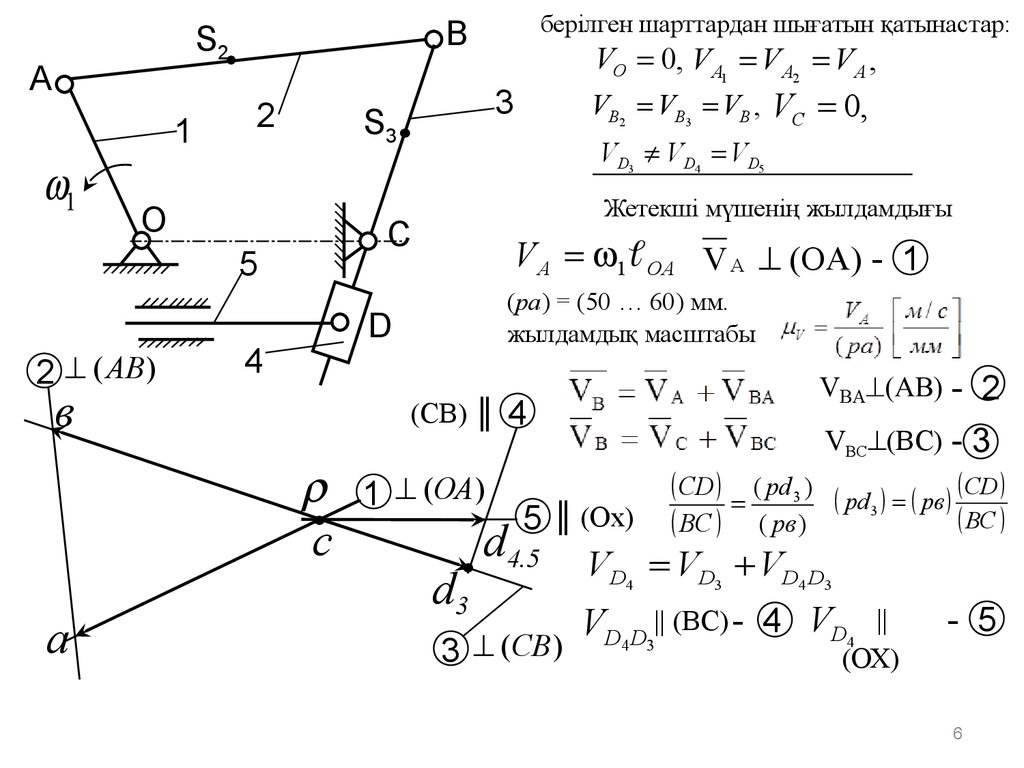
V A 1 OA V A (OA) - 1
(ра) = (50 … 60) мм.
жылдамдық масштабы
(CB) ║
c
a
Жетекші мүшенің жылдамдығы
D
4
VВ2 VВ3 VВ , VС 0,
VD3 VD4 VD5
С
5
VО 0, VА1 V А2 V А ,
3
S3
О
2 ( АВ)
берілген шарттардан шығатын қатынастар:
В
S2
4
- 2
VBC (BC)
СD ( рd3 ) pd pв СD
3
ВС
5 ║ (Ox) ВС ( рв)
d4.5 V V V
D4
D3
D4 D3
1 (ОА )
d3
3 (СВ )
VD4 D3|| (ВС) - 4 VD4
||
(ОХ)
- 5
6
7.
ВS2
А
1
1
2
в
s2
a
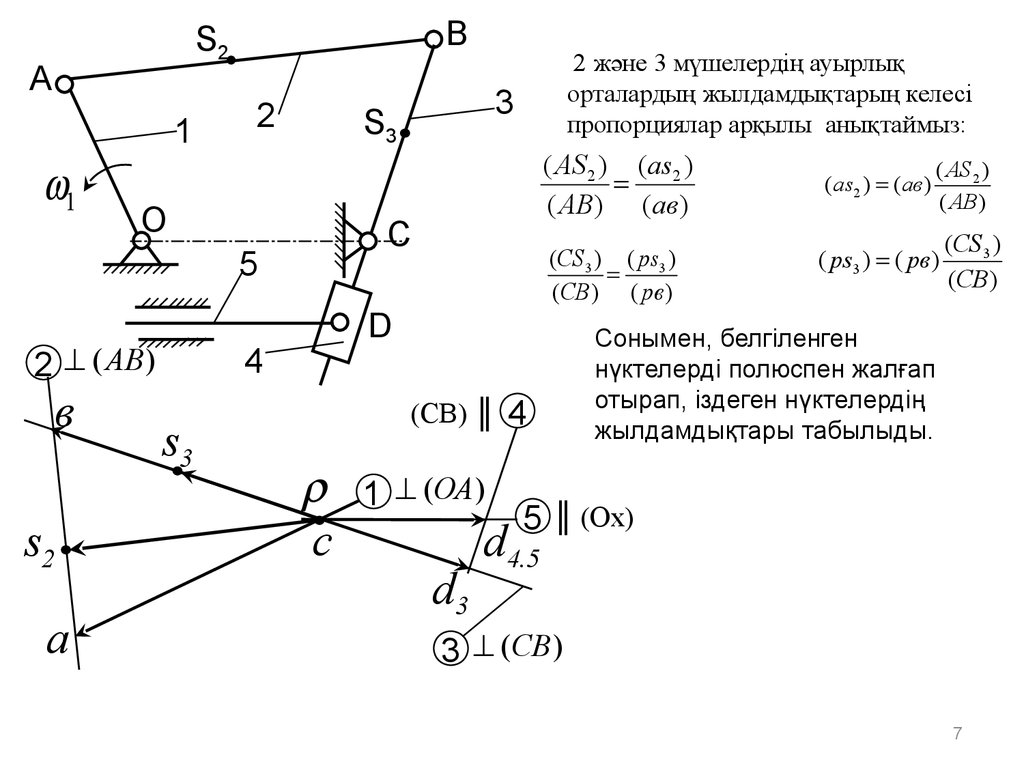
(СS 3 ) ( ps3 )
(СB ) ( pв )
D
4
s3
( АS 2 ) (аs2 )
( AB) (aв )
С
5
2 ( АВ)
3
S3
О
2 және 3 мүшелердің ауырлық
орталардың жылдамдықтарың келесі
пропорциялар арқылы анықтаймыз:
(CB) ║
c
1 (ОА )
d3
4
(аs2 ) (aв )
( АS 2 )
( AB)
( ps3 ) ( pв )
(СS 3 )
(СB )
Сонымен, белгіленген
нүктелерді полюспен жалғап
отырап, іздеген нүктелердің
жылдамдықтары табылыды.
5 ║ (Ox)
d4.5
3 (СВ )
7
8.
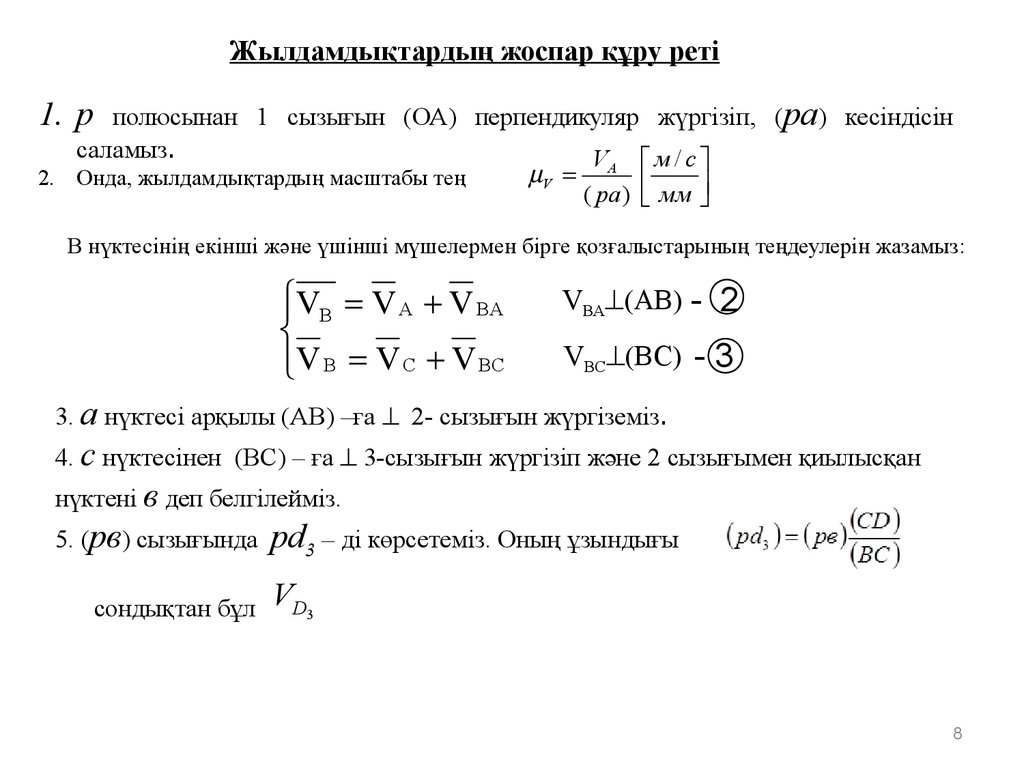
Жылдамдықтардың жоспар құру реті1. р
полюсынан 1 сызығын (ОА) перпендикуляр жүргізіп, (ра) кесіндісін
саламыз.
V м /с
V А
2. Онда, жылдамдықтардың масштабы тең
( ра) мм
В нүктесінің екінші және үшінші мүшелермен бірге қозғалыстарының теңдеулерін жазамыз:
VB V A V BA
V B V C V BC
VBA (AB) VBC (BC)
2
-3
3. а нүктесі арқылы (АВ) –ға 2- сызығын жүргіземіз.
4. с нүктесінен (ВС) – ға 3-сызығын жүргізіп және 2 сызығымен қиылысқан
нүктені в деп белгілейміз.
5. (pв) сызығында
сондықтан бұл
pd3 – ді көрсетеміз. Оның ұзындығы
VD3
8
9.
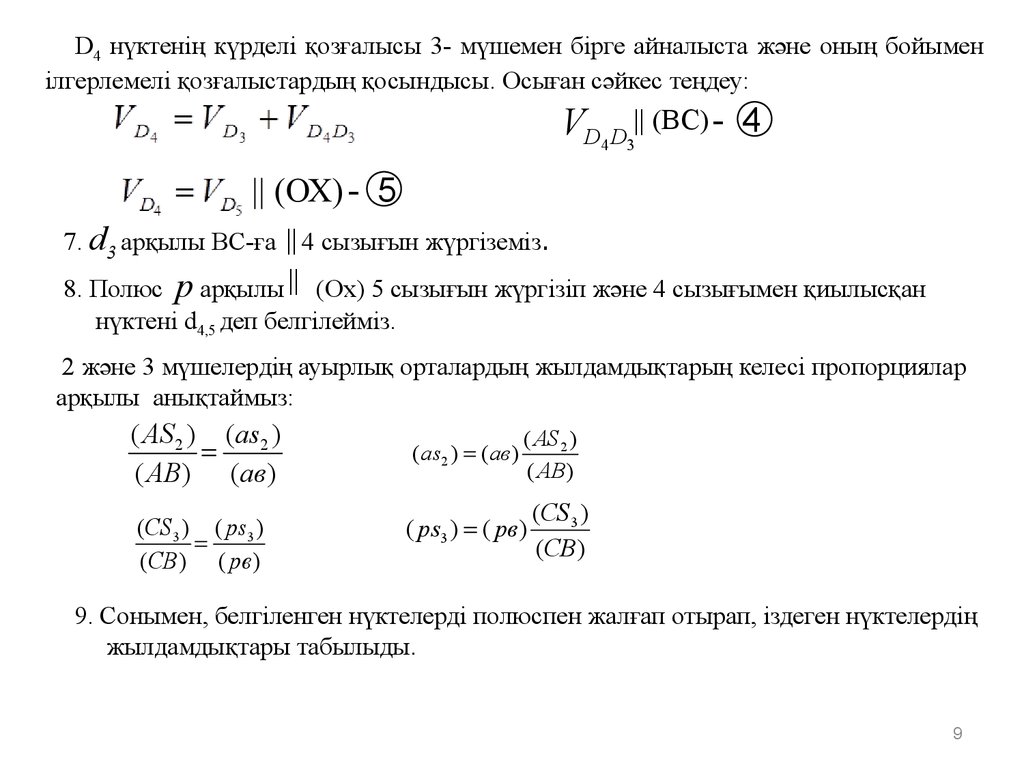
D4 нүктенің күрделі қозғалысы 3- мүшемен бірге айналыста және оның бойыменілгерлемелі қозғалыстардың қосындысы. Осыған сәйкес теңдеу:
VD4 D3|| (ВС) - 4
- 5
7. d3 арқылы ВС-ға || 4 сызығын жүргіземіз.
8. Полюс р арқылы || (Ох) 5 сызығын жүргізіп және 4 сызығымен қиылысқан
нүктені d4,5 деп белгілейміз.
2 және 3 мүшелердің ауырлық орталардың жылдамдықтарың келесі пропорциялар
арқылы анықтаймыз:
( АS 2 ) (аs2 )
( AB) (aв )
(СS 3 ) ( ps3 )
(СB ) ( pв )
(аs2 ) (aв )
( АS 2 )
( AB)
( ps3 ) ( pв )
(СS 3 )
(СB )
9. Сонымен, белгіленген нүктелерді полюспен жалғап отырап, іздеген нүктелердің
жылдамдықтары табылыды.
9
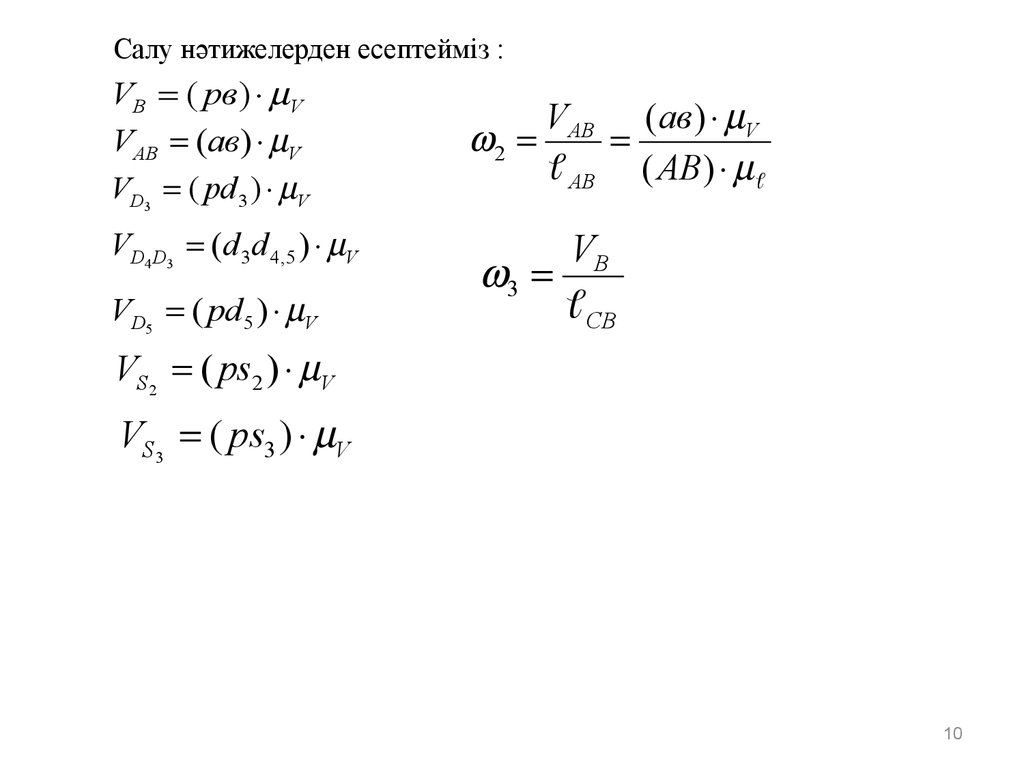
10.
Салу нәтижелерден есептейміз :VВ ( pв ) V
VАВ (ав) V
VD3 ( pd 3 ) V
VD4 D3 (d 3 d 4,5 ) V
VD5 ( pd 5 ) V
VAB (ав) V
2
AB ( АВ)
VВ
3
СВ
VS 2 ( ps2 ) V
VS3 ( ps3 ) V
10
11. ПЛОСКИЕ МЕХАНИЗМЫ
Tmm2.exe11