












 Математика
МатематикаПохожие презентации:










Метод координат. Система координат на плоскости и в пространстве
1.
Глава2. МЕТОД КООРДИНАТПроф.Гусева Н.И.
§ 1. Система координат на плоскости и в пространстве.
I Координаты точки на плоскости
Замечание. С каждой плоскостью связывается множество векторов, параллельных этой плоскости. Оно является
двумерным векторным подпространством – подпространство, соответствующее (направляющее) этой плоскости.
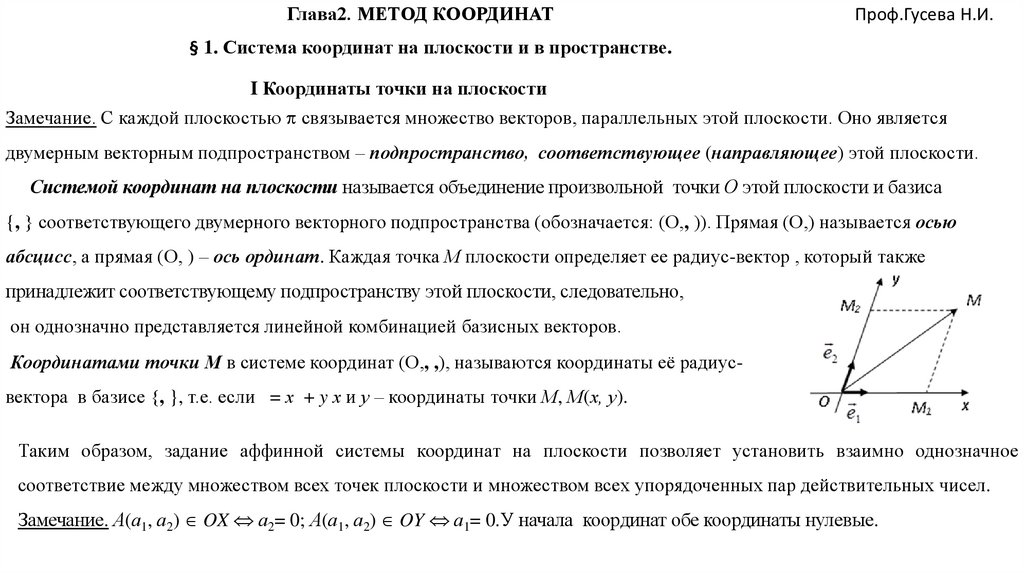
Системой координат на плоскости называется объединение произвольной точки О этой плоскости и базиса
{, } соответствующего двумерного векторного подпространства (обозначается: (О,, )). Прямая (О,) называется осью
абсцисс, а прямая (О, ) – ось ординат. Каждая точка М плоскости определяет ее радиус-вектор , который также
принадлежит соответствующему подпространству этой плоскости, следовательно,
он однозначно представляется линейной комбинацией базисных векторов.
Координатами точки М в системе координат (О,, ,), называются координаты её радиусвектора в базисе {, }, т.е. если = х + y х и у – координаты точки М, М(х, у).
Таким образом, задание аффинной системы координат на плоскости позволяет установить взаимно однозначное
соответствие между множеством всех точек плоскости и множеством всех упорядоченных пар действительных чисел.
Замечание. А(а1, а2) OX а2= 0; А(а1, а2) OY а1= 0.У начала координат обе координаты нулевые.
2.
II. Координаты точки в пространствеПусть О - произвольная точка пространства , {,
}- базис векторного трехмерного пространства V3. Аффинной
системой координат в пространстве называется объединение точки О и базиса {, }. О- начало координат, векторы ,
– координатными векторами (обозначается (О, , ) или Охуz).
Три направленные прямые,
проходящие через точку О и имеющими
направления, называются осями абсцисс, ординат и аппликат
(обозначаются Ох, Оу, Оz соответственно). Попарно взятые координатные
оси располагаются в координатных плоскостях Оху, Оуz и Охz.
= х + y + z М(х,у,z)
Замечание. Если точка М(х,у,z) Оху ,, компланарны = х + у . z = 0.
Аналогично, М(х,у,z) Охz y = 0; М(х,у,z) Оez x = 0.
М(х,у,z) Ох y = z = 0; М(х,у,z) Оy x = z = 0; М(х,у,z) Оz x = y = z = 0. M=O x = y = z = 0.
Система
координат
называется
прямоугольной
декартовой,
если
ее
координатные
векторы
образуют
ортонормированный базис соответствующего векторного подпространства. (V2 для плоскости и V3 для пространства). В
пространстве такая система обозначается так: (О,), на плоскости - (О,). В этом случае координатные оси системы
попарно перпендикулярны.
3.
III. Простейшие задачи в координатахЗАДАЧА 1. Дана система координат (О,, ) и точки А(х1,у1,z1) и В(х2, у2, z2). Найдем координаты вектора в базисе {, }.
□ Представим вектор как сумму векторов: = + . Т. к. = х1+у1+z1, = х2+у2+z2, то
= – = (х2+у2+z2) – (х1+у1+z1) = (х2 –х1) +(y2 –у1) +(z2 –z1).
По определению координат вектор имеет координаты (х2 –х1, y2 –у1, z2 –z1).
Замечание. В системе координат (О, , ) на координатной плоскости Оху эта задача решается аналогично. Если в
системе координат (О, , ) даны точки А(х1, у1) и В(х2, у2) в базисе {, } вектор (х2 –х1, y2 –у1).
ЗАДАЧА 2. В системе координат (О,) для точек А(х1, у1, z1) и В(х2, у2, z2) найти расстояние между А и В.
□ Расстояние между А и В равно длине вектора . Вектор имеет координаты (х2–х1, y2–у2, z2–z1) в ортонормированном
базисе {
Замечание. В системе координат (О, ) на плоскости Оху задача решается аналогично.
Для точек А(х1, у1), В(х2, у2,) расстояние между ними равно: .
4.
IV Деление отрезка в данном отношенииПростым отношением трех точек А, В, С одной прямой называется такое число λ, что выполняется равенство:
= λ (*)
Обозначают: (АВ,С) = и говорят, что точка С делит отрезок АВ в отношении λ.
Замечание.1 Точка С лежит внутри отрезка АВ (АВ,С)>0, (т. к. векторы
отрезка АВ (АВ,С) <0 (т. к. векторы и
и сонаправлены), и точка С вне
противоположно направлены).
Замечание 2. Простое отношение (А В, С) не может быть равно (– 1), т. к.
(А В, С) = – 1 = – -
= – точки А и В совпадают.
Теорема (о простом отношении). Для любого числа – 1 существует единственная точка С, делящая отрезок АВ в
отношении .
□. Т.к. = λ = λ ( = – λ + . =
Из теоремы об откладывании вектора от точки следует, что если дан вектор, то существует, причем, только одна такая
точка С, для которой выполняется равенство (**).■
5.
ЗАДАЧА 3. Даны точки А(х1, у1, z1), В(х2, у2, z2). Найти координаты точки С, делящей отрезок АВ в отношении λ.□ Если С (х, у, z) и (АВ, С) = λ = λ или: х – х1 = λ(х2 – х), у – у1 = λ(у2 – у), z – z1 = λ(z2 – z).
Выразим из этих равенств х, у, z:
x
x1 x2
,
1
y
y1 y2
,
1
z
z1 z2
1
Замечание 3. На плоскости Оху задача решается аналогично. Для точек А(х1, у1) и В(х2, у2). Координаты точки С(х, у),
делящей отрезок АВ в отношении λ, выражаются по формулам:
x
x1 x2
,
1
y
y1 y2
1
Замечание 4. Точка С является серединой отрезка АВ тогда и только тогда, когда простое отношение (АВ, С) = 1. Если в
пространстве даны точки А(х1, у1 , z1), В(х2, у2, z2) и точка С – середина АВ, то, координаты х, у, z точки С равны:
x
x1 x2
,
2
y
y1 y2
z z
, z 1 2
2
2
На плоскости даны точки А(х1,у1), В(х2,у2), если точка С –середина отрезка АВ, то, координаты х, у точки С равны:
x=, y=
6.
§ 2. Преобразования аффинных систем координатI Формулы преобразования координат в пространстве
В пространстве даны две системы (О, , ) и . Будем говорить, что данные системы координат одинаково
(противоположно) ориентированы, если одинаково (противоположно) ориентированы базисы этих систем.
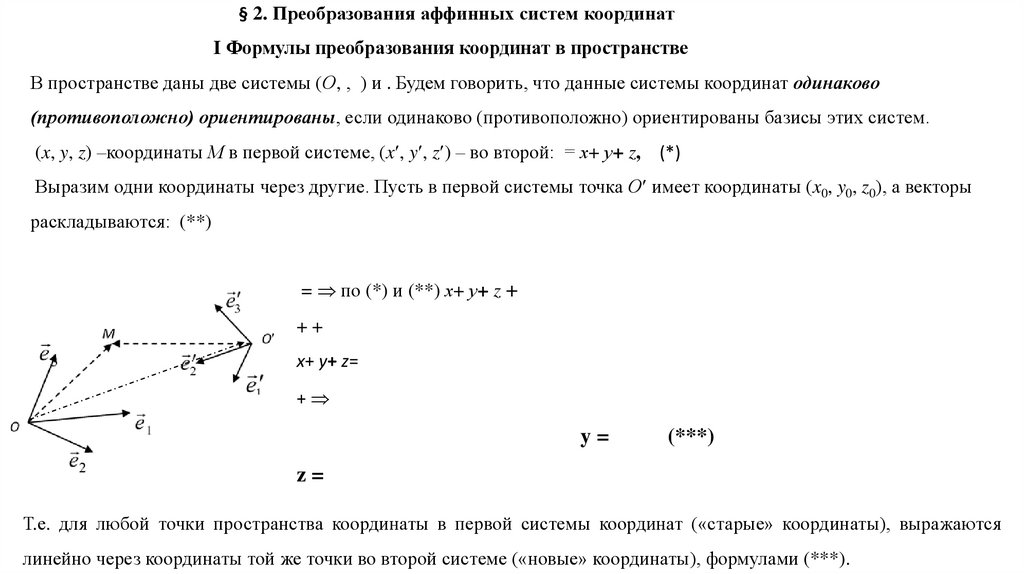
(x, y, z) –координаты М в первой системе, (x , y , z ) – во второй: = х+ у+ z, (*)
Выразим одни координаты через другие. Пусть в первой системы точка О имеет координаты (x0, y0, z0), а векторы
раскладываются: (**)
= по (*) и (**) х+ у+ z +
++
x+ у+ z=
+
y=
(***)
z=
Т.е. для любой точки пространства координаты в первой системы координат («старые» координаты), выражаются
линейно через координаты той же точки во второй системе («новые» координаты), формулами (***).
7.
y=(***)
z=
c11
Замечание. Матрица А= c 21
c 31
c12
c 22
c 32
c13
c 23
, составленная из коэффициентов при x , y , z , является матрицей перехода от
c 33
базиса {, } к базису {}. Определитель матрицы А не равен нулю в силу того, что базисные векторы {}
не
компланарны.
Знак определителя А показывает, одинаково или противоположно ориентированы старая и новая системы
координат, а именно: > 0 системы ориентированы одинаково, < 0 противоположно ориентированы.
Замечание. Из системы (***) можно линейно выразить новые координаты точки через ее старые координаты. Тем
самым будут получены формулы перехода от системы (О , ) к системе (О,, ).
8.
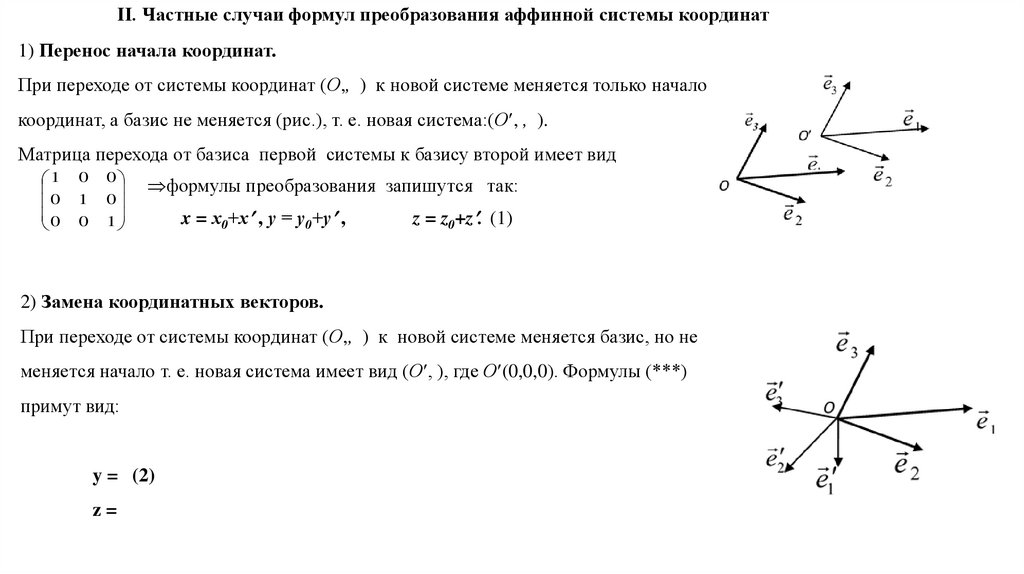
II. Частные случаи формул преобразования аффинной системы координат1) Перенос начала координат.
При переходе от системы координат (О,, ) к новой системе меняется только начало
координат, а базис не меняется (рис.), т. е. новая система:(О , , ).
Матрица перехода от базиса первой системы к базису второй имеет вид
1
0
0
0
1
0
0
0
1
формулы преобразования запишутся так:
x = х0+х , у = у0+у ,
z = z0+z . (1)
2) Замена координатных векторов.
При переходе от системы координат (О,, ) к новой системе меняется базис, но не
меняется начало т. е. новая система имеет вид (О , ), где О (0,0,0). Формулы (***)
примут вид:
y = (2)
z=
9.
III. Формулы преобразования координат на плоскостиПусть
(О,,) и (О , )
-
две системы координат на этой плоскости. Они одинаково (противоположно)
ориентированными, если одинаково (противоположно) ориентированы соответствующие им базисы.
Выразим координаты (x,y) произвольной точки М плоскости в первой системы через ее координаты (x ,y ) во
второй системе. Аналогично пространству, формулы преобразования аффинной системы координат на плоскости:
,
y=
(****)
где матрица А = c11 c12 - матрица перехода от базиса {, } к базису {}.
c21
c22
Если определитель > 0 системы ориентированы одинаково, < 0 противоположно ориентированы
1) Перенос начала координат
Формулы (****) записываются так:
Частные случаи
2) Замена координатных векторов).
Формулы (****) примут вид:
x= х0+х
у= у0+у
y=
10.
IV Преобразование прямоугольной декартовой системы координатА) В пространстве заданы две прямоугольные декартовы системы координат (О, , ,) и (). Формулы перехода от
n).
первой системы ко второй имеют вид (***). Коэффициенты– это координаты векторов новой системы относительно
старой, т. е.: + + +
Умножая каждое из равенств скалярно сначала на , потом на
,
и на , получим для сmn:
Для сmn выполнено
,, ,
,, .
c2m1+c2m2+c2m3=1,
cm1cn1+cm2cn2+cm3cn3= 0 (m, n=1,2,3, m n).
Матрицы с такими условиями называются ортогональными
Б) На плоскости даны две прямоугольные системы координат (О, , ) и (О ,), (О, , ) - правая. При переходе к системе (О , )
получим формулы перехода :
x матрица
x0 c11 x c12 y
где
y y0 c21 x c22 y
– ортогональна.
c11 c12
c21
c22
Коэффициенты с11, с21 и с12, с22 являются координатами единичных векторов относительно базиса {, }
,.
Пользуясь этими соотношениями, выразим коэффициенты c11, c21, c12, c22 через направленный угол .
11.
Первый случай. (О ,) - правая система (,)= .= cos = c = cos= - sin
= sin = sin = sin= cos .
Тогда формулы (****) примут вид:
x=
y=
(A)
Второй случай. (О ,,-) левая система (,)= - . Действуя аналогично первому
случаю, получим: , . .
Формулы (****) в этом случае примут вид: x =
y = (В)
Замечание. Формулы преобразования прямоугольной системы можно записать: x =
y = , где = 1 (С)
= 1, если системы имеют одинаковую ориентацию, и = -1, если системы имеют противоположную ориентацию.
12.
V. Полярные координатыПара (О, ) называется полярной системой координат: О –полюс, прямую, (О, ) - полярной осью Ох.
Каждой точке М (М О), сопоставим два числа: ρ =|ОМ | (полярный радиус точки М) и направленный угол φ = ( , )
(полярный угол точки М). Эти числа однозначно определяют положение точки М на плоскости и называются полярными
координатами точки М : М(ρ, φ). Принято считать, что полюсу О соответствуют координаты: О(0,0).
Замечание. Полярный радиус ρ 0,
– π < φ π, т.е. не любая пара действительных чисел является
полярными координатами точки.
С полярной системой координат (О,) однозначно связана правая прямоугольная система координат
(О,, ), (присоединенная к данной полярной системой координат).
Рассмотрим, как связаны полярные и декартовы координаты точки в соответствующих системах.
Если (ρ,φ) – полярные координаты точки М, а (х,у) – ее координаты в присоединенной
прямоугольной декартовой системе, то по теореме об ориентированном угле:
, cos х = ρ cos φ , у = ρ sin φ.
13.
§3. Уравнение линии на плоскостиI. Уравнение линии
Фигурой называется любое множество точек. Уравнением фигуры в данной системе координат называется уравнение
(неравенство или их система), которому удовлетворяют координаты точек, принадлежащих фигуре, и не
удовлетворяют координаты точек, не принадлежащих этой фигуре.
Например, уравнение х = 0 есть уравнение координатной оси Оу в заданной системе координат на плоскости Оху, а в
пространстве неравенство у > 0 в системе координат Охуz определяет полупространство с границей Охz, которому
принадлежит точка (0,1,0).
Пример 1. В прямоугольной системе координат уравнение (х а)2+(у b)2 = r 2 (*) определяет окружность, т. е.
множество точек М(х,у), удаленных от точки М0(a,b) – центра окружности – на расстояние r (радиус окружности).
□ Точка М(х,у) лежит на указанной окружности тогда и только тогда, когда расстояние между точками М(х,у) и
М0(a,b) равно r: М М0 = r М М0 2= r 2 (*) выполнена. А координаты любой точки, не лежащей на данной
окружности, не удовлетворяют уравнению (*).■
Замечание1.Уравнение окружности радиуса r > 0 с центром в начале координат имеет вид: х2 + у2 = r2.
Замечание 2. Уравнение окружности (*) можно записать так: х2 + у2 +Аx+By+С = 0, (**)
где A= 2a, B= 2b, С = a2+b2 r2.
14.
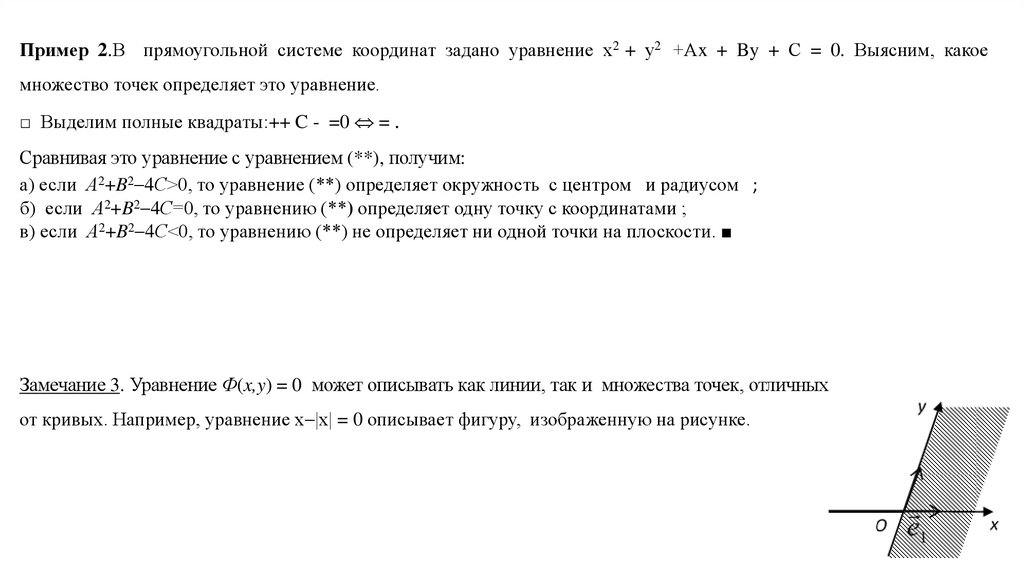
Пример 2.В прямоугольной системе координат задано уравнение х2 + у2 +Аx + By + С = 0. Выясним, какоемножество точек определяет это уравнение.
□ Выделим полные квадраты:++ C - =0 = .
Сравнивая это уравнение с уравнением (**), получим:
а) если А2+B2 4С>0, то уравнение (**) определяет окружность с центром и радиусом ;
б) если А2+B2 4С=0, то уравнению (**) определяет одну точку с координатами ;
в) если А2+B2 4С<0, то уравнению (**) не определяет ни одной точки на плоскости. ■
Замечание 3. Уравнение Ф(x,y) = 0 может описывать как линии, так и множества точек, отличных
от кривых. Например, уравнение х |х| = 0 описывает фигуру, изображенную на рисунке.
15.
II. Алгебраическая линияЛиния называется алгебраической, если в некоторой аффинной системе координат она задается алгебраическим
уравнением, то есть уравнением, левая часть которого представляет собой многочлен от переменных х и у: Ф(х,у)=0.
Всякая неалгебраическая линия называется трансцендентной.
Пример 1. Уравнение х3у + х - 5 у = 0 определяет алгебраическую линию, х + sin у = 0 -трансцендентную линию.
Степень многочлена Ф(х,у) в уравнении (наивысшая степеней его членов) называется порядком линии.
Пимер 2. 3ху + х + 2 = 0 задает на плоскости линию второго порядка, х + 6ху2 – 5у + 2 = 0 – линию третьего порядка.
Теорема (о порядке линии). Если линия в некоторой аффинной системе координат определяется алгебраическим
уравнением степени n, то эта линия и в любой другой аффинной системе координат определяется алгебраическим
уравнением той же степени.
□ Пусть линия в системе (О, , ) имеет уравнение Ф(х,у) = 0, где Ф(х,у) - сумму слагаемых вида аmkхmуk (m+k). Переход в новую
систему (О ,, ) происходит по формулам: , y =
Т.к. формулы линейны, то степень Ф(х,у) (порядок линии) увеличиться не может.Если бы она уменьшилась, то при обратном
переходе (от новой системе координат к исходной) степень должна увеличиваться, что не возможно.■
Замечание. Разбиение линий на алгебраические и трансцендентные имеет место при рассмотрении их уравнений
только в аффинной системе координат.
16.
III. Параметрическое задание линииДля аналитического представления линии бывает удобным выражать переменные координаты х и у точек этой линии
через третью вспомогательную переменную (параметр): х = (t), у = ψ(t), (***)
где (t) и ψ(t) предполагаются непрерывными по параметру t в некоторой области изменения этого параметра.
Уравнения (***) называются параметрическими уравнениями линии.
Пример. В прямоугольной декартовой системе координат (О,, ) найдем параметрические
уравнения окружности радиуса
r >0 с центром в начале координат.
□ Для любой точки М(х,у) этой окружности t - ориентированный угол между вектором и
радиусом-вектором точки М х = r cos t , у = r sin t .(****)
Уравнения (****) - параметрические уравнения окружности. Для однозначности определения t каждой точке М(х,у)
ограничим область его изменения полуинтервалом 0 t < 2 . Заметим, что для исключения параметра t из уравнений
(****) достаточно возвести в квадрат и сложить эти уравнения. В этом случае получим уравнение: . ■
Замечание. Задание в некоторой системе координат линии уравнением у = f(х) есть частный случай параметрического
определения этой линии при х = t , у = f(t).
17.
§ 4.Уравнение поверхности. Уравнение линии в пространствеI Уравнение поверхности
В пространстве в качестве фигур чаще всего рассматриваются поверхности, например плоскость, сфера,
цилиндрические и конические поверхности и др. S - некоторая поверхность В системе координат Охуz уравнение:
Ф(x,y,z) = 0 (*) называется уравнением поверхности S, если этому уравнению удовлетворяют координаты x, y и z точек,
принадлежащих поверхности S, и не удовлетворяют координаты точек, не принадлежащих поверхности.
Пример 1. В прямоугольной системе координат уравнение сферы с радиусом R и центром в точке М0(a,b,с) (то есть
множество точек М(х,у,z), удаленных от точки М0 на расстояние R) имеет вид: (х а)2+(у b)2 +(z c)2= R2. (**)
Замечание 1.Уравнение сферы (**) можно записать в виде: х2 + у2 + z2 +Аx+By+Cz+D = 0, где
A= 2a, B= 2b, C= 2c,
D=a2+b2+c2 R2.
Можно доказать, что если его коэффициенты удовлетворяют условию А2+B2+С2 4D>0, то поверхность, заданная этим
уравнением есть сфера с центром (-А, В, -С) и радиусом ..
Замечание 2. Не всякое уравнение вида (*) определяет какую-нибудь поверхность. Например, уравнение
х2 + у2 + z2 +1 = 0 не определяет никакой поверхности.
18.
II. Алгебраическа поверхностьПоверхность называется алгебраической, если в некоторой аффинной системе координат она задается алгебраическим
уравнением с тремя переменными вида (*), то есть уравнением, левая часть которого представляет собой многочлен от
переменных х, у и z. Всякая неалгебраическая поверхность называется трансцендентной.
Порядком алгебраической поверхности называется степень определяющего его алгебраического уравнения.
Пример. Уравнение 4х3 + 3z2у2 – 23уz + у + 1 = 0 задает алгебраическую поверхность четвертого порядка,
х3 + sin у – cos z = 0 задает трансцендентную поверхность.
Теорема (о порядке алгебраической поверхности). Если поверхность в некоторой аффинной системе координат
определяется алгебраическим уравнением степени n, то эта поверхность и в любой другой аффинной системе
координат определяется алгебраическим уравнением той же степени.
Доказательство теоремы повторяет доказательство аналогичной теоремы для линии и опирается на тот факт, что связь
координат точек при переходе от одной аффинной системы координат к другой линейна.
Замечание. Как и в случае линий на плоскости, разбиение множества поверхностей пространства на алгебраические и
трансцендентные имеет место при рассмотрении их уравнений в аффинной системе координат
19.
III. Параметрическое задание поверхностиДля параметрического задания поверхности координаты ее произвольной точки представляют как функции двух
параметров u и v: х = (u, v), у = ψ(u, v), z = ( u, v) (**)
При этом хотя бы два из этих уравнений должны быть разрешимы относительно параметров u и v . Действительно,
пусть, например, u и v выражаются как функции х и у из первых двух уравнений (**): u = Ф1(х,у), v = Ф2(х,у).
Подставив полученные значения u и v в третье уравнение (**), получим уравнение с тремя переменными: z (
Ф1(х,у), Ф2(х,у))=0, которое (при некоторых ограничениях) определяет поверхность.
Пример. Сфера радиуса R с центром в начале координат может быть задана параметрическими уравнениями:
x = R cos u sin v, y = R sin u sinv,
z = R cos v. 0 u < 2 v <2
Заметим, что для исключения параметров u и v из уравнений (**) достаточно возвести в квадрат и сложить эти
уравнения.
20.
IV Уравнение линии в пространствеЛинию в пространстве можно рассматривать как пересечение двух поверхностей.
Заданы уравнения поверхностей S1 и S2: Ф1(х, у, z) = 0 и Ф2(х, у, z) = 0, - линия пересечения поверхностей S1 и S2.
Cистема двух уравнений: Ф1(х, у, z) = 0 , Ф2(х, у, z) = 0 определяет линию , т. е. является уравнением этой линии.
Пример 1. Пара уравнений х2 + у2 = 4
и z = 0 в прямоугольной декартовой системе координат определяет окружность
с центром в начале координат и радиусом 2, лежащую в координатной плоскости Оxy.
Замечание 1. Линию в пространстве можно представить системой двух уравнений более чем одним способом, т. к.
может существовать не одна пара поверхностей, пересекающихся по этой линии.
Замечание 2. Не любая система двух уравнений определяет линию, т. к. существуют не пересекающиеся поверхности.
Можно рассматривать параметрическое представление линии в пространстве, задавая координаты х, у и z любой точки
линии в виде непрерывных функций некоторого параметра t: х = (t), у = ψ(t), z = (t). ( ***)
21.
Замечание 3. Во многих случаях от параметрических уравнений (***) линии можно перейти к ее уравнениямвида (**). Если, например, третье из уравнений (***) разрешимо относительно t: t = (z), то, подставляя это
значение t в первые два равенства, получим уравнения х = ( (z)), у = ψ( (z)). Эти уравнения определяют две
поверхности, пересечением которых является линия .
Пример 2. Пусть линия задана параметрическими уравнениями x = 2t + 1, y = 3t, z = t + 5. Запишем уравнение
этой линии в виде пересечения двух каких-нибудь поверхностей.
□ Выразим из третьего уравнения переменную t: t = z - 5. Подставим результат в первые два уравнения:
x=2(z-5)+1, y=3(z-5). Получим уравнение линии: x- 2z + 9 = 0, y - 3z + 15 = 0. ■
В данном случае, это прямая как пересечение двух плоскостей.
22.
Суть метода координат при решении геометрических задач состоит в том, что при доказательстве теорем и решениизадач используются аналитические методы. Основная идея метода – найти условие, определяющее фигуру, чтобы
исследуя ее аналитическое задание, делать выводы о ее геометрических свойствах. Применение метод координат
предполагает решение двух типов задач:
1) по заданным свойствам фигуры составить аналитические условия, определяющие ее – найти уравнение фигуры;
2) по заданным аналитическим условиям, определяющим фигуру, выяснить ее геометрические свойства.
Рассмотрим задачи первого класса.
Пример 3. Найти условия, определяющие каждую из заштрихованных фигур, изображенных на рисунке.
a)-2
-1
б) x 0
в)