










 Механика
МеханикаПохожие презентации:


")



. Лабораторная работа №10")



Электродинамическая модель двигателя NXT. Лабораторная работа №2
1. Лабораторная работа №2:
Электродинамическая модельдвигателя NXT
2023 г.
2. Механическая модель двигателя NXT
M stM st
J
nls
M st - стартовый момент ротора двигателя (входной параметр)
nls - максимальная угловая скорость ротора не нагруженного двигателя
J
- момент инерции ротора двигателя (конструктивная постоянная)
t - угловая скорость ротора двигателя (выходной параметр)
t - угловое ускорение ротора двигателя
Начальные условия
t 0 : 0 0, 0
M st
.
J
2
3. Параметры электродинамической модели двигателя NXT
Входные:U ctrl
– подаваемое на двигатель напряжение
M oth
– момент внешних сил, приложенный к валу двигателя
Выходные:
t
– угловое ускорение ротора двигателя
t
– угловая скорость ротора двигателя
t
– угол поворота ротора двигателя
I t
– сила тока в обмотке ротора двигателя
M el t
– момент силы, развиваемый двигателем
3
4. Учет электрических процессов в двигателе
M el M oth– неполная модель двигателя
J
J
Закон Ома для цепи двигателя
dI
U ctrl i L I ( R p Rn )
dt
U ctrl
i
L
– ЭДС внешнего источника тока
– ЭДС индукция ротора, возникающая при его вращении
dI
dt
– ЭДС самоиндукция ротора, возникающая при изменении в нем
силы тока
R p Rn – полное сопротивление цепи
R p – сопротивление обмотки ротора
R p Rn – сопротивление остальных элементов цепи
4
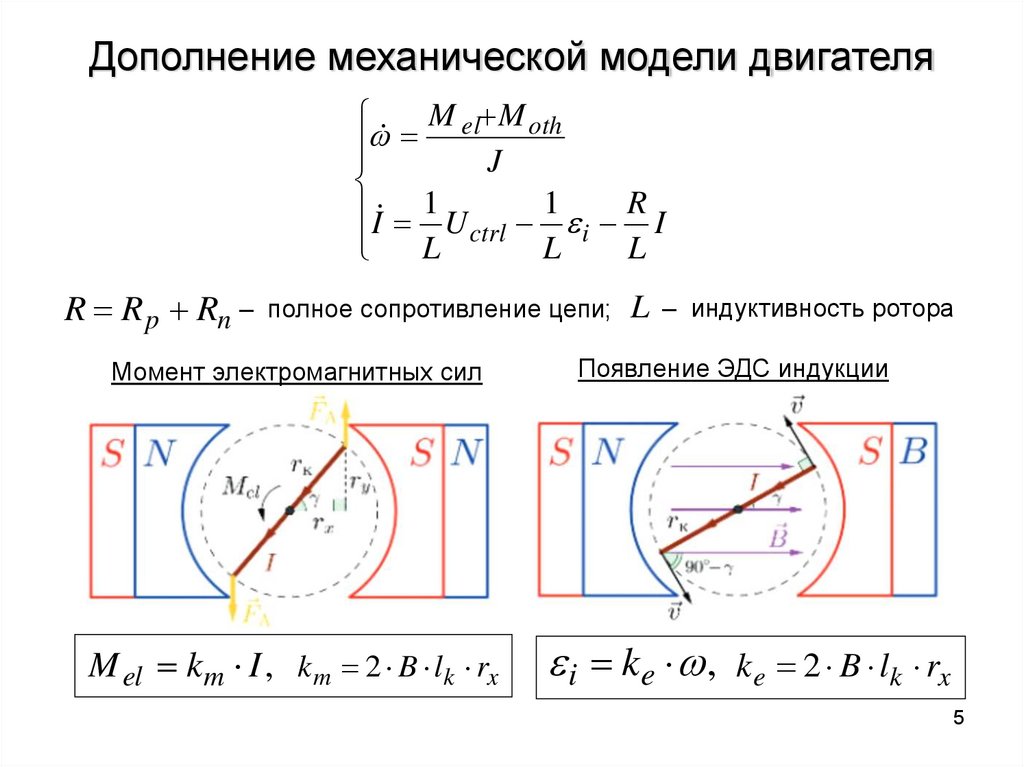
5.
Дополнение механической модели двигателяM el M oth
J
I 1 U 1 R I
ctrl
i
L
L
L
R R p Rn – полное сопротивление цепи; L – индуктивность ротора
Момент электромагнитных сил
Появление ЭДС индукции
M el k m I , k m 2 B lk rx
i ke , ke 2 B lk rx
5
6.
Электродинамическая модель двигателя NXTM oth
km
J I J
I 1 U ke R I
ctrl
L
L
L
6
7. Определение сопротивления R
Черный провод – это «земля» для двигателя.Белый – это питание для двигателя (7 – 9
Вольт; в зависимости от заряда батареи).
Красный – это «земля» для энкодера,
встроенного в двигатель.
Зеленый – это питание для энкодера. Желтый
– это сигнал таймера, который идет от датчика
(энкодера).
Синий – это линия, по которой передаются
данные энкодера.
7
8. Результаты определение сопротивления и индуктивности
R 7.7 ОмИзмерить индуктивность обмоток ротора двигателя Lego
NXT также можно с помощью мультиметра.
3
L 4.7 10
Гн
8
9. Результаты идентификации механической модели Lego NXT на разных режимах
P=100%P – относительная
мощность двигателя
P=80%
P=60%
Tm 0.065 с
P=40%
P=20%
9
10. Определение конструктивных постоянных
n 48 - коэффициент редукцииrot
nls nls n
M st J nls n
km
I st
Tm I st
U ctrl
U ctrl
ke
nls
nls n
km 1.27 10
2
k e 1.015 10 2
10
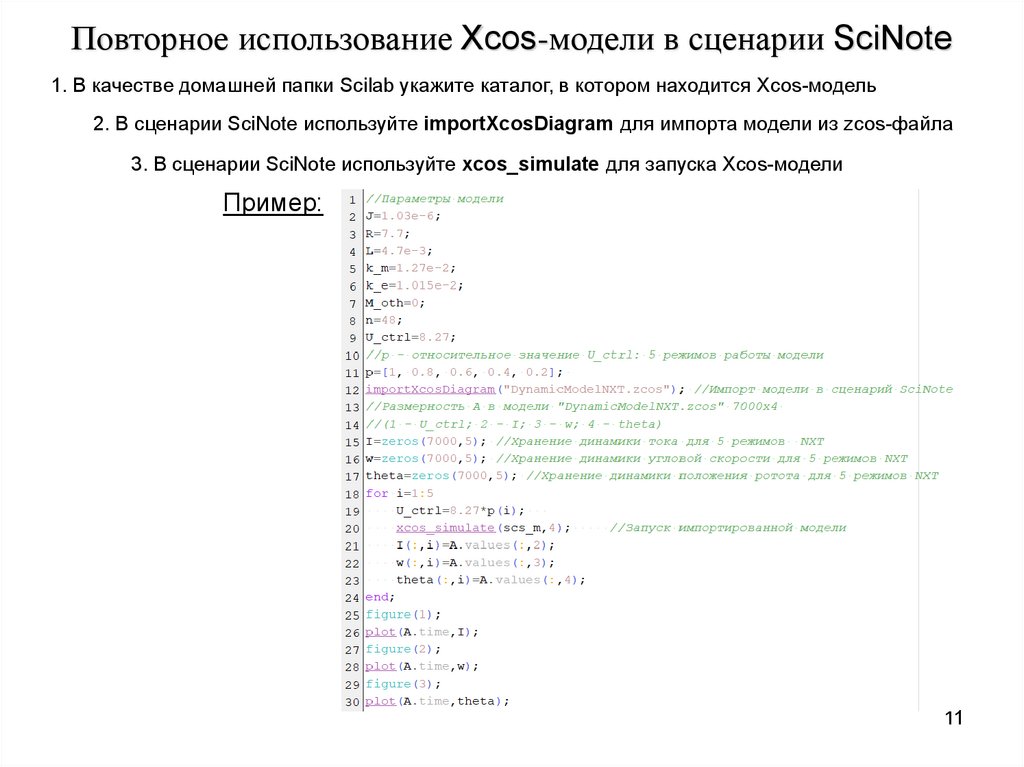
11.
Повторное использование Xcos-модели в сценарии SciNote1. В качестве домашней папки Scilab укажите каталог, в котором находится Xcos-модель
2. В сценарии SciNote используйте importXcosDiagram для импорта модели из zcos-файла
3. В сценарии SciNote используйте xcos_simulate для запуска Xcos-модели
Пример:
11
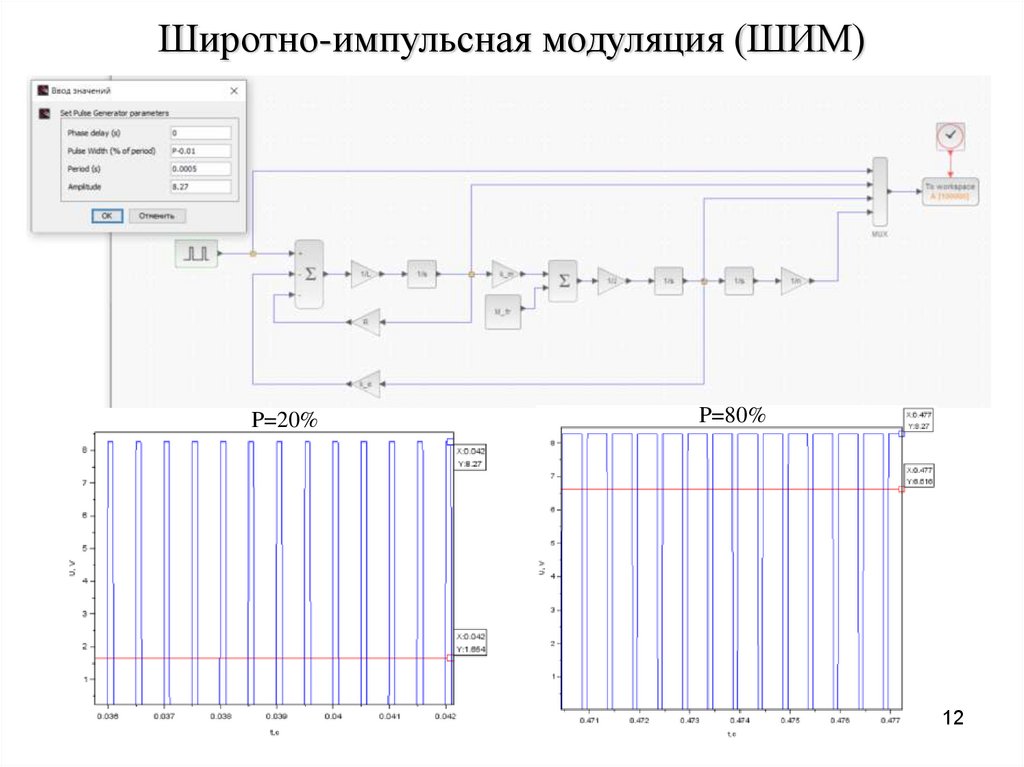
12.
Широтно-импульсная модуляция (ШИМ)P=20%
P=80%
12
13. Задание 1 к лабораторной работе
1. С помощью среды Bricx Command Center создайте программу длярегистрации данных энкодера двигателя NXT при его включении на 5
режимах, когда относительная мощность равна: 20, 40, 60, 80, 100%. Для
именования файлов с данными используйте шаблон <ФИО>-Lab2<мощность в процентах>.txt. Файлы с данными приложите к отчету.
2. В среде Scilab:SciNote выполните идентификацию параметров
двигателя NXT: T_m и w_nls для каждого режима. Полученные значения
включите в таблицу отчета по лабораторной работе (см. слайд 9).
3. Выполните в Scilab:SciNote расчет конструктивных параметров k_m и
k_e для каждого режима работы и поместите в таблицу отчета по
лабораторной работе (см. слайд 10). Рассчитайте средние значения для
k_m и k_e, и также поместите их в отчет.
4. В соответствие со слайдом 6 в среде Scilab:Xcos постройте
электродинамическую модель двигателя NXT. С помощью этой модели
для каждого режима работы двигателя постройте зависимость от
времени тока в обмотке ротора, его угловой скорости и угла поворота.
5. Постройте семейства зависимостей тока, угловой скорости и угла
поворота ротора от времени на разных режимах. Графики приложите к
отчету.
13
14. Задание 2 к лабораторной работе
1. Подключите в качестве источника входного сигнала генераторимпульсов и настройте его на генерацию ШИМ-сигнала в соответствие в
режимами работы двигателя. Частоту ШИМ возьмите равной 8000 Гц
(Это частота ШИМ в двигателе NXT).
2. С помощью модели двигателя NXT постройте семейства зависимостей
тока, угловой скорости и угла поворота ротора от времени на разных
режимах и сравните их с графиками, полученными Вами в первом
задании.
3. Исследуйте поведение семейства графиков зависимости тока, угловой
скорости и угла поворота ротора от времени при изменении частоты
ШИМ-генератора: 4000, 2000, 1000, 500 Гц.
4. Реализуйте электродинамическую модель двигателя NXT на языке
Python для случая ненагруженного двигателя. Продемонстрируйте
преподавателю результаты работы программы, когда в на вход модели
подается постоянный и ШИМ-сигнал.
14