

 Электроника
ЭлектроникаПохожие презентации:










Механический робот как исполнитель алгоритма
1.
2.
Что такое алгоритм?Кто может быть исполнителем
алгоритма?
Какие виды алгоритмов вы знаете?
Кто является формальным
исполнителем алгоритма?
3.
Приготовление тортаПошив одежды
Ремонт обуви
Пломбирование зуба
Уборка мусора во дворе
4.
Формальныйисполнитель
Машина работает
автоматически, т.е.
действует формально. Она
выполняет те команды,
которые для неё
предусмотрел человек.
Неформальный
исполнитель
Человек может
мыслить. Он сам
принимает решение.
5.
Для чего используются мобильные роботыКак они передвигаются
Какие приспособления помогают роботу
исследовать окружающий мир
6.
Все создаваемые человекоммеханизмы призваны в первую
очередь облегчить его жизнь.
Для выполнения работ в таких местах, где
присутствие человека затруднительно или
вовсе исключено, используются
мобильные (подвижные) роботы. Они
могут быть предназначены для
самостоятельных действий в соответствии
с программой, заложенной в их память.
Но для обеспечения надёжности такие
роботы чаще всего управляются
оператором – человеком,
контролирующим действия из
безопасного места по проводной или
радиосвязи.
Робот-исследователь
Робот-сапёр
7.
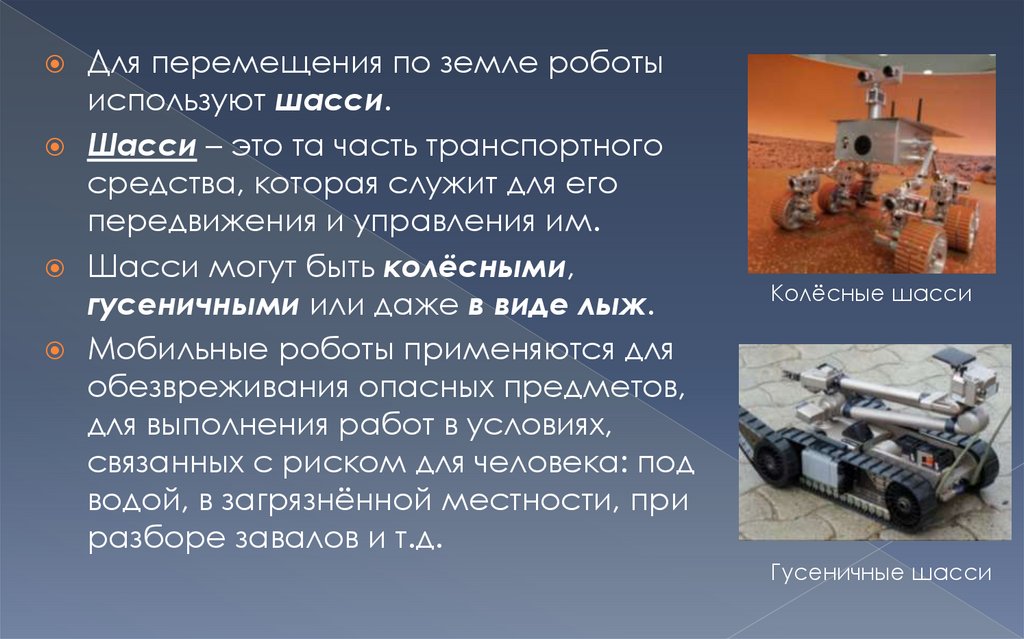
Для перемещения по земле роботыиспользуют шасси.
Шасси – это та часть транспортного
средства, которая служит для его
передвижения и управления им.
Шасси могут быть колёсными,
гусеничными или даже в виде лыж.
Мобильные роботы применяются для
обезвреживания опасных предметов,
для выполнения работ в условиях,
связанных с риском для человека: под
водой, в загрязнённой местности, при
разборе завалов и т.д.
Колёсные шасси
Гусеничные шасси
8.
Часто от робота требуется «принятьрешение» без участия человека.
Например, при встрече с препятствием
объехать его без подсказки оператора.
При создании робота конструкторы
стараются учесть ситуации, в которых он
может оказаться, и предусмотреть его
поведение. Это позволяет облегчить
работу оператора.
Но как робот «понимает», что перед
ним препятствие? Он получает
информацию об окружающем мире
через датчики.
Датчик – это приспособление, которое
позволяет исследовать окружающий
мир: «видеть», «слышать», «чувствовать»
температуру, прикосновение и многое
другое.
9.
Различные датчики дают возможностьвоспринимать характеристики
окружающего мира.
Видеокамеры – «глаза» робота – не только
обнаруживают, но и опознают объекты,
передают и записывают изображение.
Звуковые датчики – «уши» робота. В
зависимости от программы робот может
реагировать на хлопок, свист, стук и даже
распознавать речь.
Датчики положения и наклона определяют
местонахождение и поддерживают
равновесие робота во избежание падения
на неровной поверхности.
Датчики касания обнаруживают объекты
при непосредственном контакте.
Температурные датчики измеряют
температуру окружающей среды.