



")
 Математика
МатематикаПохожие презентации:
")









Линейная алгебра и аналитическая геометрия
1. Линейная алгебра и аналитическая геометрия
Тема: Системылинейных
уравнений
Лектор Имас О.Н.
2. Ранг матрицы
(Это вы уже должны были написать)a11 a12
a
a22
21
Пусть A = (aij) – матрица размера m×n.
A
Выпишем все миноры матрицы A
am1 am 2
первого порядка
M 1(1) , M 1( 2) , M1(3) , ...
Ранг матрицы
a1n
a2 n
amn
M 2(1) , M 2( 2) , M 2(3) , ...
...............................
t-го порядка (где t = min{m,n}): M t(1) , M t( 2) , M t(3) , ...
второго порядка
ОПР. Минор
Mk
матрицы
A
называется ее
базисным минором, если он отличен от нуля, а все миноры
матрицы A более высокого порядка k+1, k+2,…, t равны нулю.
Метод окаймляющих миноров.
пропустить 10 клеточек
ОПР. Рангом матрицы A называется порядок ее базисного минора.
Обозначают: r(A) или rang(A).
3. Метод нахождения ранга матрицы
Метод окаймляющих миноров.Метод элементарных преобразований.
Элементарные
преобразования
матрицы
–
это
преобразования следующего вида:
1) умножение строки (столбца) на число 0;
2) прибавление к i-й строке (столбцу) k-й строки (столбца),
умноженной на число 0;
3) перестановка i-й и k-й строки (столбца).
Матрица B называется эквивалентной матрице A , если она
может быть получена из A элементарными преобразованиями.
Обозначают: A ~ B.
ТЕОРЕМА 2. Эквивалентные матрицы имеют равные ранги.
пропустить 25 клеточек
4. Системы линейных уравнений 1. Основные понятия
(Это уже новое. Продолжайте писать)Системы линейных уравнений
1. Основные понятия
Уравнение называется линейным, если оно содержит
неизвестные только в первой степени и не содержит
произведений неизвестных, т.е. если оно имеет вид
a1x1 + a2x2 + … + anxn = b ,
где ai,b – числа.
ai - коэффициенты уравнения, b - свободный член.
Если b = 0, то уравнение называется однородным.
Если b ≠ 0 уравнение называется неоднородным.
Рассмотрим систему m линейных уравнений с n неизвестными,
т.е. систему вида
a11 x1 a12 x2 a1n xn b1 ,
a x a x a x b ,
21 1
22 2
2n n
2
(1)
am1x1 am 2 x2 amn xn bm .
5.
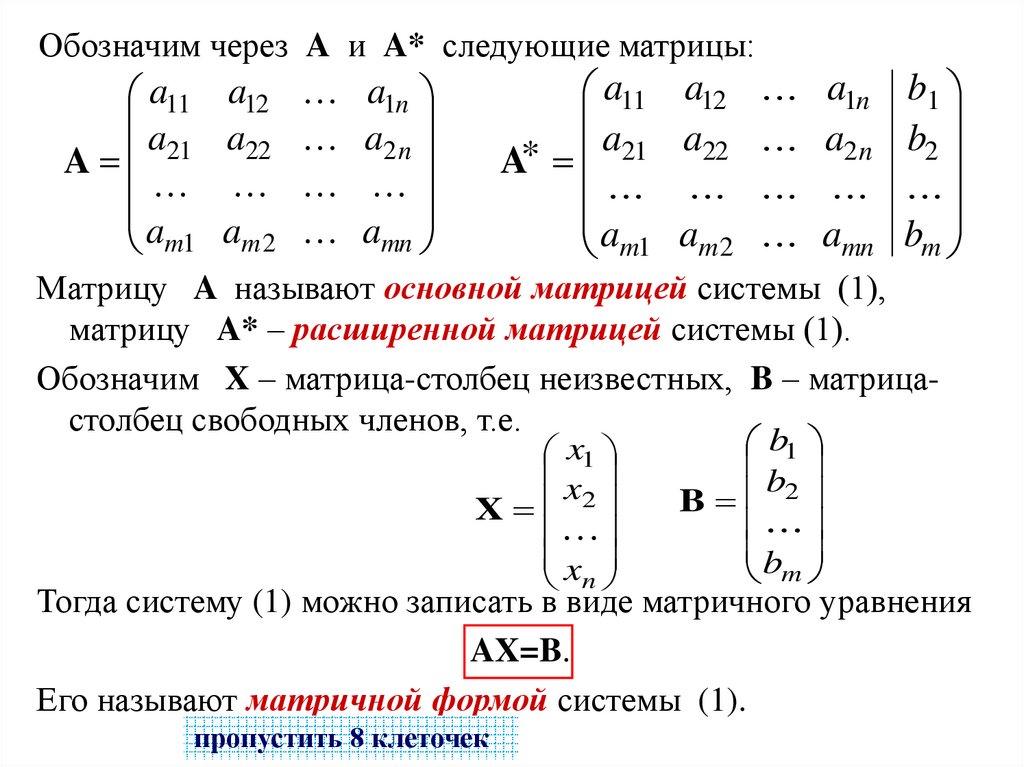
Обозначим через A и A* следующие матрицы:a11
a21
A
a
m1
a12 a1n
a22 a2 n
am 2 amn
a11
a21
*
A
a
m1
a12 a1n
a22 a2 n
am 2 amn
b1
b2
bm
Матрицу A называют основной матрицей системы (1),
матрицу A* – расширенной матрицей системы (1).
Обозначим X – матрица-столбец неизвестных, B – матрицастолбец свободных членов, т.е.
b1
x1
b
x2
2
B
X
b
x
m
n
Тогда систему (1) можно записать в виде матричного уравнения
AX=B.
Его называют матричной формой системы (1).
пропустить 8 клеточек
6.
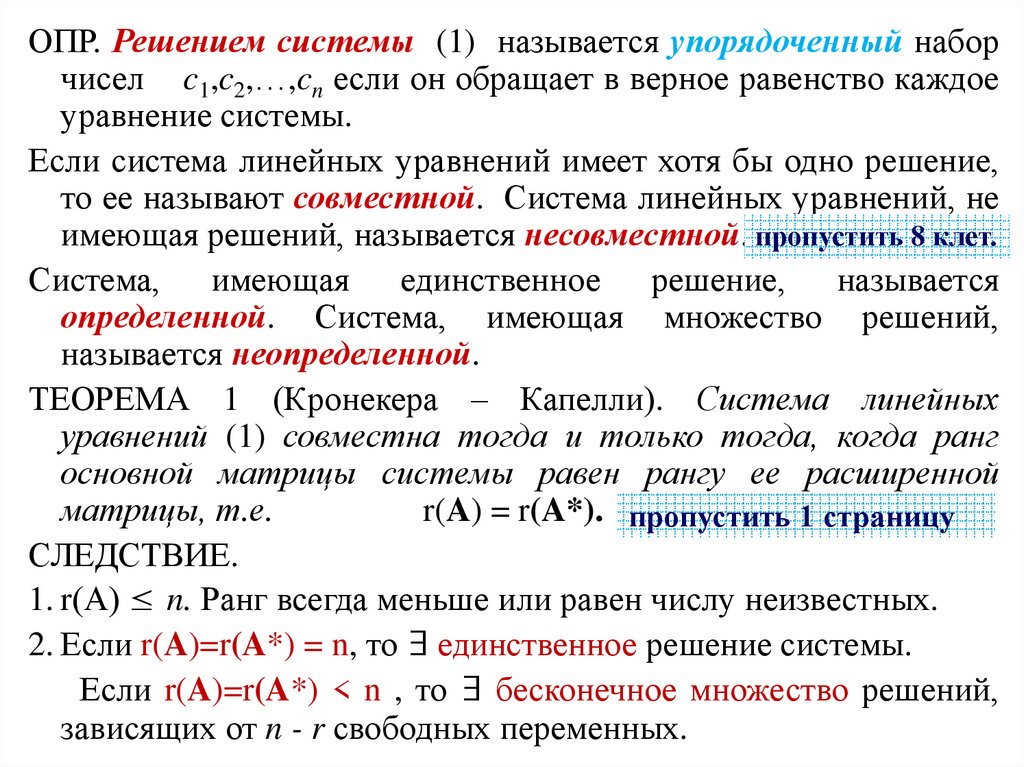
ОПР. Решением системы (1) называется упорядоченный наборчисел c1,c2,…,cn если он обращает в верное равенство каждое
уравнение системы.
Если система линейных уравнений имеет хотя бы одно решение,
то ее называют совместной. Система линейных уравнений, не
имеющая решений, называется несовместной. пропустить 8 клет.
Система, имеющая единственное решение, называется
определенной. Система, имеющая множество решений,
называется неопределенной.
ТЕОРЕМА 1 (Кронекера – Капелли). Система линейных
уравнений (1) совместна тогда и только тогда, когда ранг
основной матрицы системы равен рангу ее расширенной
матрицы, т.е.
r(A) = r(A*). пропустить 1 страницу
СЛЕДСТВИЕ.
1. r(А) ≤ n. Ранг всегда меньше или равен числу неизвестных.
2. Если r(A)=r(A*) = n, то ∃ единственное решение системы.
Если r(A)=r(A*) < n , то ∃ бесконечное множество решений,
зависящих от n - r свободных переменных.
7. Метод Гаусса (метод исключения неизвестных)
Две системы называются эквивалентными (равносильными)если их решения совпадают. К эквивалентной системе можно
перейти с помощью элементарных преобразований системы.
Элементарными преобразованиями системы линейных
уравнений называются преобразования следующего вида:
1) умножение обеих частей уравнения на число α 0;
2) прибавление к одному уравнению другого, умноженного на
число α 0;
3) перестановка двух уравнений;
На практике вместо уравнений системы работают с матрицей,
составленной из коэффициентов – расширенной матрицей
8.
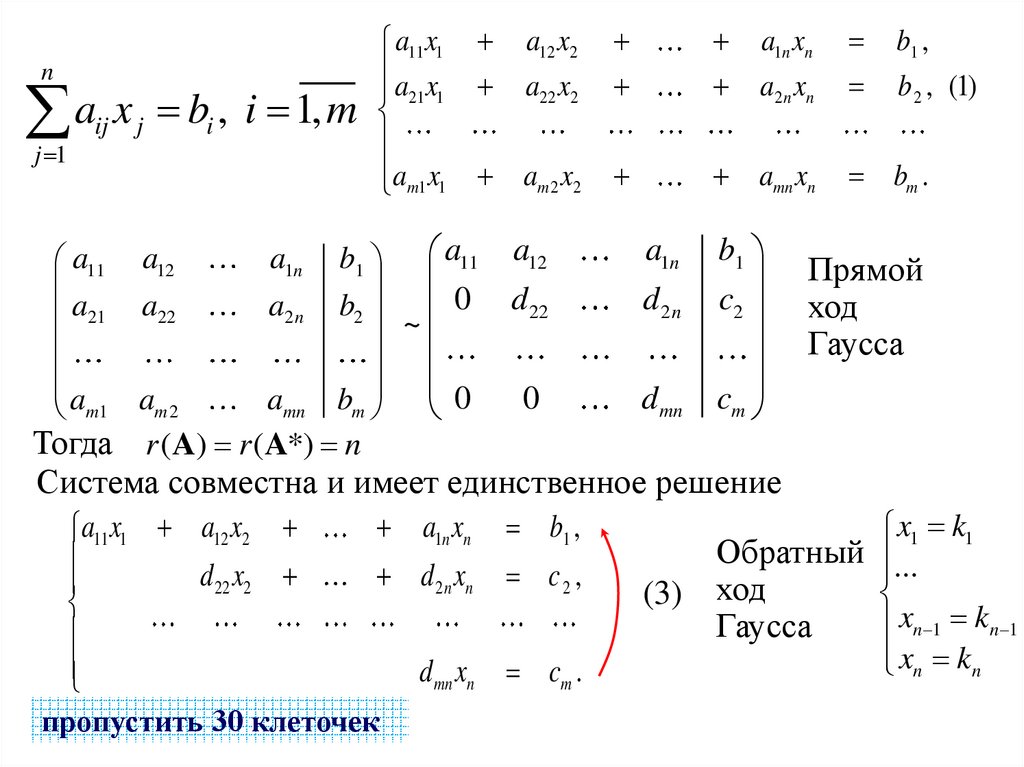
na x b , i 1, m
j 1
ij
j
i
a11 x1
a x
21 1
am1 x1
a12 x2
a22 x2
a1n xn
a2 n xn
am 2 x2
amn xn
bm .
a1n b1 a11
a11 a12
0
a
a2 n b2
21 a22
~
amn bm 0
am1 am 2
Тогда r ( A) r ( A*) n
a12
d 22
a1n
d2n
0
d mn
b1
c2
cm
b1 ,
b 2 , (1)
Прямой
ход
Гаусса
Система совместна и имеет единственное решение
a1n xn b1 ,
a11 x1 a12 x2
d 22 x2
d 2 n xn c 2 ,
d mn xn cm .
пропустить 30 клеточек
(3)
x1 k1
Обратный ...
ход
Гаусса
xn 1 kn 1
xn kn
9.
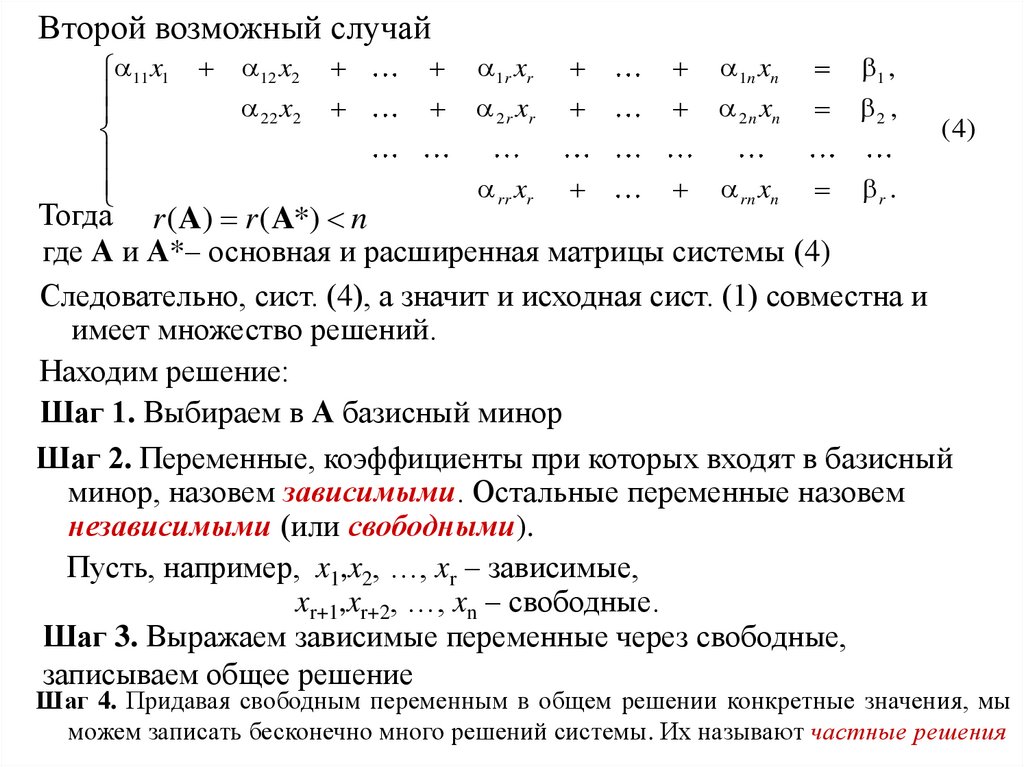
Второй возможный случай11 x1
12 x2
22 x2
1r xr
2 r xr
1n xn
2 n xn
1 ,
2 ,
rr xr
rn xn
r .
(4)
Тогда r ( A) r ( A*) n
где А и А*– основная и расширенная матрицы системы (4)
Следовательно, сист. (4), а значит и исходная сист. (1) совместна и
имеет множество решений.
Находим решение:
Шаг 1. Выбираем в А базисный минор
Шаг 2. Переменные, коэффициенты при которых входят в базисный
минор, назовем зависимыми. Остальные переменные назовем
независимыми (или свободными).
Пусть, например, x1,x2, …, xr – зависимые,
xr+1,xr+2, …, xn – свободные.
Шаг 3. Выражаем зависимые переменные через свободные,
записываем общее решение
Шаг 4. Придавая свободным переменным в общем решении конкретные значения, мы
можем записать бесконечно много решений системы. Их называют частные решения