")




")





























 РЕГУЛЯТОР")
 Физика
ФизикаПохожие презентации:










Системы управления химико-технологическими процессами (СУХТП)
1. СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ (СУХТП)
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
КАФЕДРА АВТОМАТИЗАЦИИ ПРОЦЕССОВ
ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
(СУХТП)
Составлено:
доцент каф. АПХП Рудакова И.В.
САНКТ-ПЕТЕРБУРГ
2019
1
2.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРАБеспалов, А.В. Системы управления химико-технологическими процессами: учебник для вузов/
А.В. Беспалов, Н.И. Харитонов. - М.: ИКЦ «Академкнига», 2007. – 690 с.
Шувалов, В.В. Автоматизация производственных процессов в химической промышленности /
В.В. Шувалов, Г.А. Огаджанов, В.А. Голубятников. - М.: Химия, 1991. – 480с.
Полоцкий, Л.М. Автоматизация химических производств / Л.М. Полоцкий, Г.И. Лапшенков. –
М.: Химия, 1982. – 295 с.
Кулаков, М.В. Технологические измерения и приборы для химических производств / М.В.
Кулаков. – М.: Альянс, 2008. – 424 с.
Харазов, В.Г. Интегрированные системы управления технологическими процессами / В.Г.
Харазов.- 3 издание, перераб и доп.-СПб.: Профессия, 2013.- 656с.
2
3.
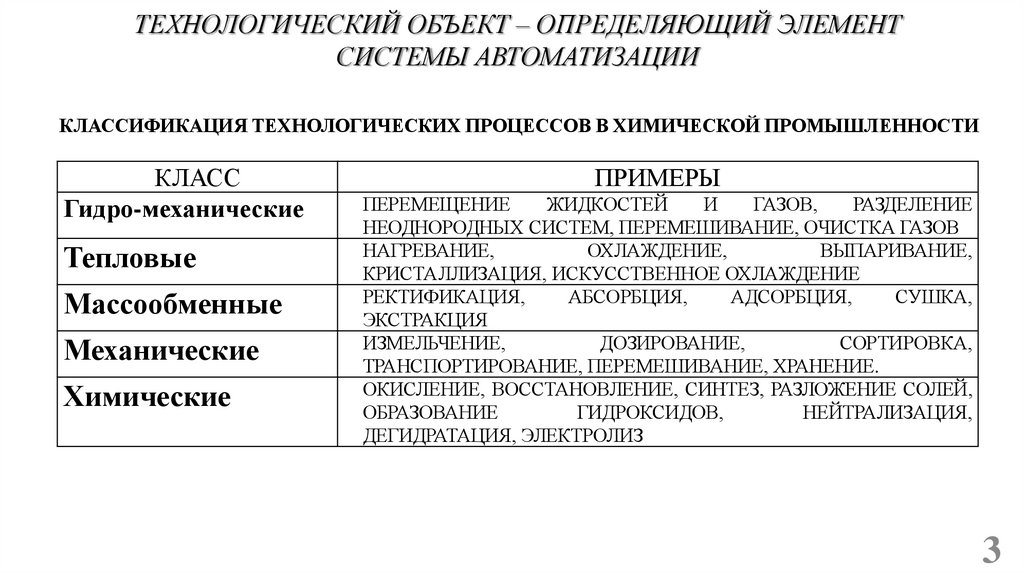
ТЕХНОЛОГИЧЕСКИЙ ОБЪЕКТ – ОПРЕДЕЛЯЮЩИЙ ЭЛЕМЕНТСИСТЕМЫ АВТОМАТИЗАЦИИ
КЛАССИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
КЛАСС
Гидро-механические
Тепловые
Массообменные
Механические
Химические
ПРИМЕРЫ
ПЕРЕМЕЩЕНИЕ
ЖИДКОСТЕЙ
И
ГАЗОВ,
РАЗДЕЛЕНИЕ
НЕОДНОРОДНЫХ СИСТЕМ, ПЕРЕМЕШИВАНИЕ, ОЧИСТКА ГАЗОВ
НАГРЕВАНИЕ,
ОХЛАЖДЕНИЕ,
ВЫПАРИВАНИЕ,
КРИСТАЛЛИЗАЦИЯ, ИСКУССТВЕННОЕ ОХЛАЖДЕНИЕ
РЕКТИФИКАЦИЯ,
АБСОРБЦИЯ,
АДСОРБЦИЯ,
СУШКА,
ЭКСТРАКЦИЯ
ИЗМЕЛЬЧЕНИЕ,
ДОЗИРОВАНИЕ,
СОРТИРОВКА,
ТРАНСПОРТИРОВАНИЕ, ПЕРЕМЕШИВАНИЕ, ХРАНЕНИЕ.
ОКИСЛЕНИЕ, ВОССТАНОВЛЕНИЕ, СИНТЕЗ, РАЗЛОЖЕНИЕ СОЛЕЙ,
ОБРАЗОВАНИЕ
ГИДРОКСИДОВ,
НЕЙТРАЛИЗАЦИЯ,
ДЕГИДРАТАЦИЯ, ЭЛЕКТРОЛИЗ
3
4. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
ТЕХНОЛОГИЧЕСКИЙОБЪЕКТ
УПРАВЛЕНИЯ
–
СОВОКУПНОСТЬ
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА (ТП) И ОБОРУДОВАНИЯ, НА КОТОРОМ ЭТОТ
ПРОЦЕСС ВЫПОЛНЯЕТСЯ
ПАРАМЕТРЫ ПРОЦЕССА – ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ, ЕГО ХАРАКТЕРИЗУЮЩИЕ
ЦЕЛЬ УПРАВЛЕНИЯ:
ДОСТИЖЕНИЕ
И
ПОДДЕРЖАНИЕ
ЗАДАННОГО ЗНАЧЕНИЯ
КРИТЕРИЯ
ЭФФЕКТИВНОСТИ
(ОПТИМАЛЬНОСТИ) ТЕХНОЛОГИЧЕСКОГО
ПРОЦЕССА
ПРИ
СОБЛЮДЕНИИ
ТРЕБОВАНИЙ ТЕХНОЛОГИЧЕСКОЙ
И
ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ
4
5. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
УПРАВЛЕНИЕ – СОВОКУПНОСТЬ ОПЕРАЦИЙ, НЕОБХОДИМЫХ ДЛЯ ПУСКА ИОСТАНОВА ПРОЦЕССА, А ТАКЖЕ ДЛЯ ПОДДЕРЖАНИЯ ИЛИ ИЗМЕНЕНИЯ В
ТРЕБУЕМОМ НАПРАВЛЕНИИ ЕГО ПАРАМЕТРОВ
РЕГУЛИРОВАНИЕ – ПОДДЕРЖАНИЕ НА ЗАДАННОМ ЗНАЧЕНИИ ТЕХНОЛОГИЧЕСКИХ
ПАРАМЕТРОВ ПРОЦЕССА.
УПРАВЛЕНИЕ
РУЧНОЕ
ДИСТАНЦИОННОЕ
АВТОМАТИЧЕСКОЕ
5
6. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АВТОМАТИЗАЦИЯ – ЗАМЕНА РЯДА ФУНКЦИЙ ЧЕЛОВЕКА ПО КОНТРОЛЮ И УПРАВЛЕНИЮВ ДИНАМИЧЕСКИХ СИСТЕМАХ РАБОТОЙ ТЕХНИЧЕСКИХ СРЕДСТВ
• АВТОМАТИЗИРОВАННАЯ СУ – РАЗНОВИДНОСТЬ СУ, ВКЛЮЧАЮЩУЮ В СЕБЯ
ТЕХНИЧЕСКИЕ СРЕДСТВА, КОТОРЫЕ ОБЕСПЕЧИВАЮТ СБОР, ОБРАБОТКУ И ВЫВОД
ИНФОРМАЦИИ О ПРОЦЕССЕ, А ТАКЖЕ ЧАСТИЧНОЕ ПРИНЯТИЕ РЕШЕНИЙ ПО
УПРАВЛЕНИЮ ПРОЦЕССОМ И ИХ РЕАЛИЗАЦИЮ.
• АВТОМАТИЧЕСКАЯ СУ – РАЗНОВИДНОСТЬ СУ, ВКЛЮЧАЮЩЕЙ СРЕДСТВА, КОТОРЫЕ
ОБЕСПЕЧИВАЮТ АВТОМАТИЧЕСКИЙ СБОР И ОБРАБОТКУ ИНФОРМАЦИИ, ПРИНЯТИЕ
РЕШЕНИЙ И РЕАЛИЗАЦИЮ ПРИНЯТОГО РЕШЕНИЯ ПО УПРАВЛЕНИЮ ПРОЦЕССОМ.
ОБЪЕКТ РЕГУЛИРОВАНИЯ (УПРАВЛЕНИЯ) И УСТРОЙСТВА, НЕОБХОДИМЫЕ ДЛЯ
ОСУЩЕСТВЛЕНИЯ
ПРОЦЕССА
УПРАВЛЕНИЯ,
НАЗЫВАЮТСЯ
СИСТЕМОЙ
РЕГУЛИРОВАНИЯ (УПРАВЛЕНИЯ).
6
7. РАЗОМКНУТАЯ СИСТЕМА УПРАВЛЕНИЯ
ПреобразовательРазветвитель
Компаратор
7
8. ЗАМКНУТАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (АСР)
89. СТРУКТУРНАЯ СХЕМА УПРАВЛЕНИЯ ПРЕДПРИЯТИЕМ
Уровень1
2
3
Описание
АСУП (управление предприятием)
Подсистема оперативного управления предприятием
АСУПр1 (производством)
АСУПр2 (производством)
Подсистема оперативного
Подсистема оперативного
управления производством 1
управления производством 2
АСУТП 1-1
АСУТП 1-2
АСУТП 2-1
АСУТП 2-2
ТОУ1-1
ТОУ1-2
ТОУ2-1
ТОУ2-2
9
10. КЛАССИФИКАЦИЯ АСУТП
ПО ХАРАКТЕРУУПРАВЛЯЕМОГО ПРОЦЕССА
АСУТП для
АСУТП для
непрерывного
дискретноАСУТП для
процесса
непрерывного дискретного
процесса
процесса
ПО ИНФОРМАЦИОННОЙ
КОНТРОЛИРУЕМЫХ
МОЩНОСТИ
ПЕРЕМЕННЫХ
МАЛОЙ мощности
– от 10 до 40
ПОНИЖЕННОЙ мощности – от 41 до 160
СРЕДНЕЙ мощности
– от 161 до 650
ПОВЫШЕННОЙ мощности – от 651 до 2500
БОЛЬШОЙ мощности
– от 2500
10
11. КЛАССИФИКАЦИЯ АСУТП
1. АСУТП без вычислительного комплекса (ВК)2. АСУТП с ВК в режиме сбора и обработки информации
3. АСУТП с ВК в режиме советчика оператора
11
12. КЛАССИФИКАЦИЯ АСУТП
4. АСУТП с ВК, выполняющим функциицентрального
управляющего
устройства
(супервизорное управление)
5. АСУТП с ВК в режиме непосредственного
цифрового управления
12
13. СОСТАВ СИСТЕМЫ НЕПОСРЕДСТВЕННОГО ЦИФРОВОГО УПРАВЛЕНИЯ
1314. КОМПОНЕНТЫ АСУТП
1415. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМЫ
ДИНАМИЧЕСКОЕ ЗВЕНО – устройство любого физического вида иконструктивного оформления, но характеризующиеся определенным
дифференциальным уравнением
СТАТИЧЕСКАЯ характеристика связывает выходную
величину с входной в установившемся режиме
ДИНАМИЧЕСКАЯ
характеристика
дает
зависимость изменения во времени выходной
величины
при
изменении
входной
в
неустановившемся режиме
Y = f (X)
Y = f1(t) при X = f2(t)
15
16. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
Первая форма записи - ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕd 2 Y( t )
dY ( t )
dX ( t )
T1
T
T
Y
(
t
)
K
K 2 X( t ) K 3 F( t )
2
3
1
2
dt
dt
dt
T1p 2 Y ( p) T2 pY( p) T3Y ( p) K1pX( p) K 2 X ( p) K 3F( p)
Вторая форма записи – ОПЕРАТОРНАЯ ФОРМА
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПО КАНАЛУ УПРАВЛЕНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПО КАНАЛУ ВОЗМУЩЕНИЯ
WX (p)
WF (p)
K1p K 2
T1p 2 T2 p T3
K3
T1p 2 T2 p T3
Y = WX(p)X + WF(p)F
Y ( p)
оператор p d
Лапласа
dt
K1p K 2
T1p T2 p T3
2
X ( p)
K3
T1p T2 p T3
2
F( p)
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ –
выражение, связывающее выходную
величину с входной в операторной
форме:
Y ( p)
W ( p)
X ( p)
16
17. ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЗВЕНАв области действительной переменной t: Y(t) = f(X(t));
в области комплексной переменой: Y(p) = F(X(p)).
ТАБЛИЧНЫЕ ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
F( p) f ( t )e pt dt
0
c i
1
pt
f (t)
F
(
p
)
e
dt
2 i c i
f ( t ) F( p)
f ( t ) F(p)e p
t
1
f ( t )dt F(p) p
0
df ( t )
F(p)p
dt
17
18. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА h(t) –переходный процесс на выходе звена,
возникающий при подаче на его вход
скачкообразного единичного возмущающего
воздействия
Единичная
X 0, при t 0
ступенчатая
X( t ) 1( t )
функция
X 1, при t 0
ФУНКЦИЯ ВЕСА (t) – реакция звена на
единичную импульсную функцию, поданную на
его вход. Обозначается Единичная
импульсная
функция
( t )
dh ( t )
dt
d1( t )
( t )
dt
( t )dt 1
18
19. АЛГЕБРА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
1920. КЛАССИФИКАЦИЯ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ТИПОВОЕ ДИНАМИЧЕСКОЕ ЗВЕНО – звено, которое описывается дифференциальнымуравнением не выше второго порядка.
1. ПОЗИЦИОННЫЕ ЗВЕНЬЯ
1.2. Апериодическое звено первого порядка
1.1 Безынерционное (усилительное) звено
Уравнение динамики
Уравнение динамики
Y ( t ) KX( t )
Передаточная функция
W ( p) K
Передаточная функция
T
dY( t )
Y ( t ) KX( t )
dt
W ( p)
K
Tp 1
20
21. КЛАССИФИКАЦИЯ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
2. ИНТЕГРИРУЮЩИЕ ЗВЕНЬЯ2.1 Идеальное интегрирующее звено
Уравнение динамики
Передаточная функция
Y( t )
t
1
X ( t )dt
TИ 0
W ( p)
1
2.2. Интегрирующее звено с замедлением
d2Y
dY
KX
dt
dt
Передаточная функция
K
1
W( p)
Tp 1 p
Уравнение динамики
T
2
TИ p
21
22. КЛАССИФИКАЦИЯ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
3. ДИФФЕРЕНЦИРУЮЩИЕ ЗВЕНЬЯ3.1 Идеальное дифференцирующее звено
Уравнение динамики
Передаточная функция
dX ( t )
Y( t ) TД
dt
W (p) TД p
3.2. Дифференцирующее звено с замедлением
Уравнение динамики
Передаточная функция
T
dY ( t )
dX ( t )
Y( t ) TД
dt
dt
W( p )
K p
Tp 1
22
23. КЛАССИФИКАЦИЯ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
4. ЗВЕНО ЧИСТОГО ЗАПАЗДЫВАНИЯУравнение динамики
Передаточная функция
Y ( t ) X ( t )
W(p) e p
СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
НАГРУЗКА – КОЛИЧЕСТВО ВЕЩЕСТВА ИЛИ
ЭНЕРГИИ, ПРОХОДЯЩЕЕ ЧЕРЕЗ ОБЪЕКТ В
ЕДИНИЦУ ВРЕМЕНИ
ЕМКОСТЬ
–
СПОСОБНОСТЬ
ОБЪЕКТА
АККУМУЛИРОВАТЬ
ВЕЩЕСТВО
ИЛИ
ЭНЕРГИЮ
САМОВЫРАВНИВАНИЕ
–
СПОСОБНОСТЬ
ОБЪЕКТА
ПРИХОДИТЬ
В
СОСТОЯНИЕ
РАВНОВЕСИЯ БЕЗ ВМЕШАТЕЛЬСТВА ИЗВНЕ
0, t ,
h(t)
1, t
ЗАПАЗДЫВАНИЕ
–
ВРЕМЯ
МЕЖДУ
МОМЕНТОМ НАНЕСЕНИЯ ВОЗМУЩЕНИЯ НА
ВХОД ОБЪЕКТА И ПОЯВЛЕНИЕМ ОТКЛИКА НА
ВЫХОДЕ
23
24. СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
НАГРУЗКА – КОЛИЧЕСТВО ВЕЩЕСТВА ИЛИ ЭНЕРГИИ, ПРОХОДЯЩЕЕ ЧЕРЕЗ ОБЪЕКТ ВЕДИНИЦУ ВРЕМЕНИ
ЕМКОСТЬ – СПОСОБНОСТЬ ОБЪЕКТА АККУМУЛИРОВАТЬ ВЕЩЕСТВО ИЛИ ЭНЕРГИЮ
МЕРА ЕМКОСТИ – коэффициент емкости
ОДНОЕМКОСТНОЙ
ОБЪЕКТ
МНОГОЕМКОСТНОЙ
24