












 Механика
МеханикаПохожие презентации:




")





Механическая модель двигателя NXT в SciLab
1. Лабораторная работа №6:
Механическая модельдвигателя NXT в SciLab
2026 г.
2. Дифференциальное уравнение модели
M stM st
J
nls
M st - стартовый момент ротора двигателя (входной параметр)
nls - максимальная угловая скорость ротора не нагруженного двигателя
J
- момент инерции ротора двигателя (конструктивная постоянная)
t - угловая скорость ротора двигателя (выходной параметр)
t - угловое ускорение ротора двигателя
Начальные условия
M st
.
t 0 : 0 0, 0
J
3. Среда Scilab
Scilab – пакет прикладных математических программ,предоставляющий
открытое
окружение
для
инженерных
(технических) и научных расчётов. Это самая полная
общедоступная альтернатива MATLAB.
4. Определение момента инерции ротора
2m r
J
2
m – масса ротора, кг;
r – радиус ротора, м
Масса ротора определяется взвешиванием:
m 17 10 3 кг
Радиус ротора определяется штангенциркулем:
r 11 10 3 м
J 1.03 10
6
кг м
2
5. Приведенный момент инерции электропривода NXT
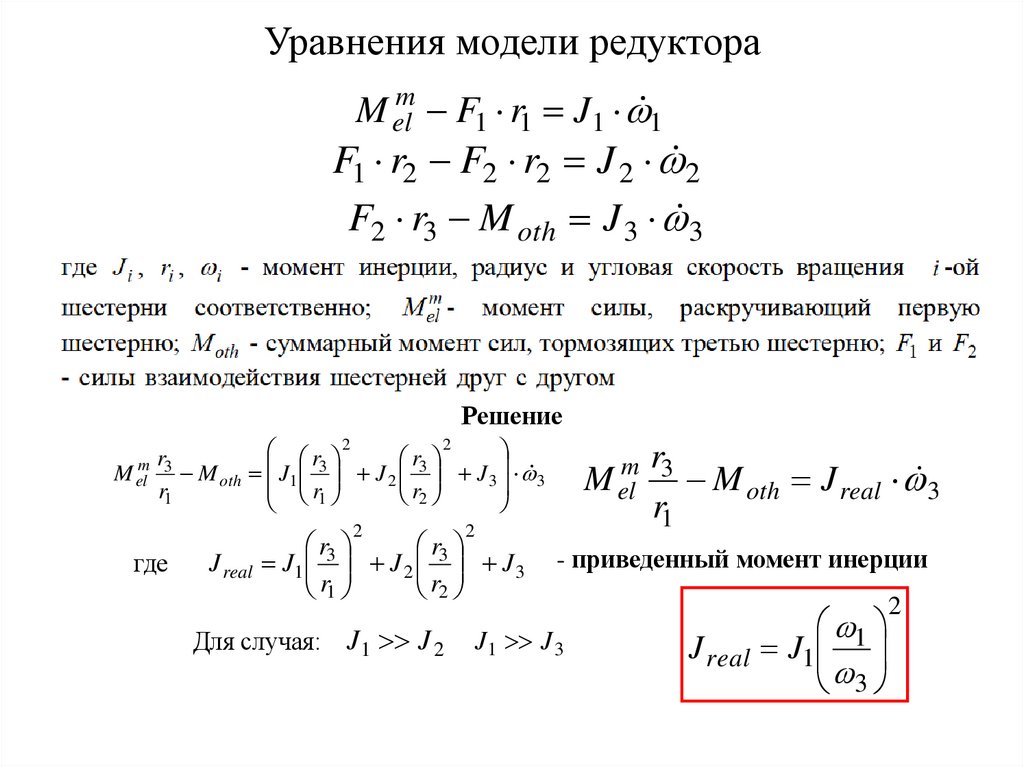
Модель редуктора6.
Уравнения модели редуктораM elm F1 r1 J1 1
F1 r2 F2 r2 J 2 2
F2 r3 M oth J 3 3
Решение
r
r
M elm 3 M oth J1 3
r1
r1
2
2
r3
J 2 J 3 3
r2
2
где
2
r
r
J real J1 3 J 2 3 J 3
r1
r2
Для случая: J1 J 2
m r3
M el M oth J real 3
r1
- приведенный момент инерции
J1 J 3
1
J real J1
3
2
7. Начальное определение параметров модели в Scilab
8. Визуальное моделирование в Scilab: Xcos
Создание модели XcosM st
M st
nls
J
Интегрирующее звено
t
t
9. Механическая модель двигателя NXT в Xcos
M stJ t
M st
nls
J
t
t
10. Результаты моделирования в Xcos
11. Идентификация механической модели двигателя
tt nls 1 exp
Tm
интегрирование
nls t nls Tm e
t
Tm
nls Tm
12. Программа сбора данных в BricxCC
13. Временная задержка в модели двигателя NXT
tkt
t k 1
14. Задание к лабораторной работе
1. С помощью среды Bricx Command Center создайте программу для регистрацииданных энкодера у двигателя NXT при его включении на полную мощность.
Откомпилируйте программу, загрузите на контроллер NXT и выполните. Файл с
результатом регистрации с помощью Explorer-NXT скопируйте в Вашу папку на
ПК.
2. В соответствие со слайдом 11 подготовьте в среде Scilab:SciNote программу для
идентификации параметров двигателя NXT: T_m и w_nls. Выполните расчет
приведенного момента M_st для коэффициента редукции n=48. Полученные
значения включите в отчет по лабораторной работе.
3. В среде Scilab:Xcos постройте механическую модель двигателя NXT. Добавьте в
схему модели элементы типа “To workspace” для сохранения результатов
моделирования зависимостей от времени углового ускорения, угловой скорости
и угла поворота выходного вала двигателя NXT.
4. В редакторе SciNotes напишите сценарий построения графиков углового
ускорения, угловой скорости и угла поворота от времени. В сценарий добавьте
команды для настройки меток осей и заголовка.
5. Изучите слайд 13. На основе изображенной там схемы на языке Python постройте
программу, реализующую механическую модель двигателя NXT. Результаты
работы программы отобразите в виде графика. Программу на языке Python
включите в отчет по лабораторной работе.