
 Математика
МатематикаПохожие презентации:










Вектор. Система координат
1. ВЕКТОР
СИСТЕМА КООРДИНАТПреподаватель: к.т.н. А.Т. Порубова
2.
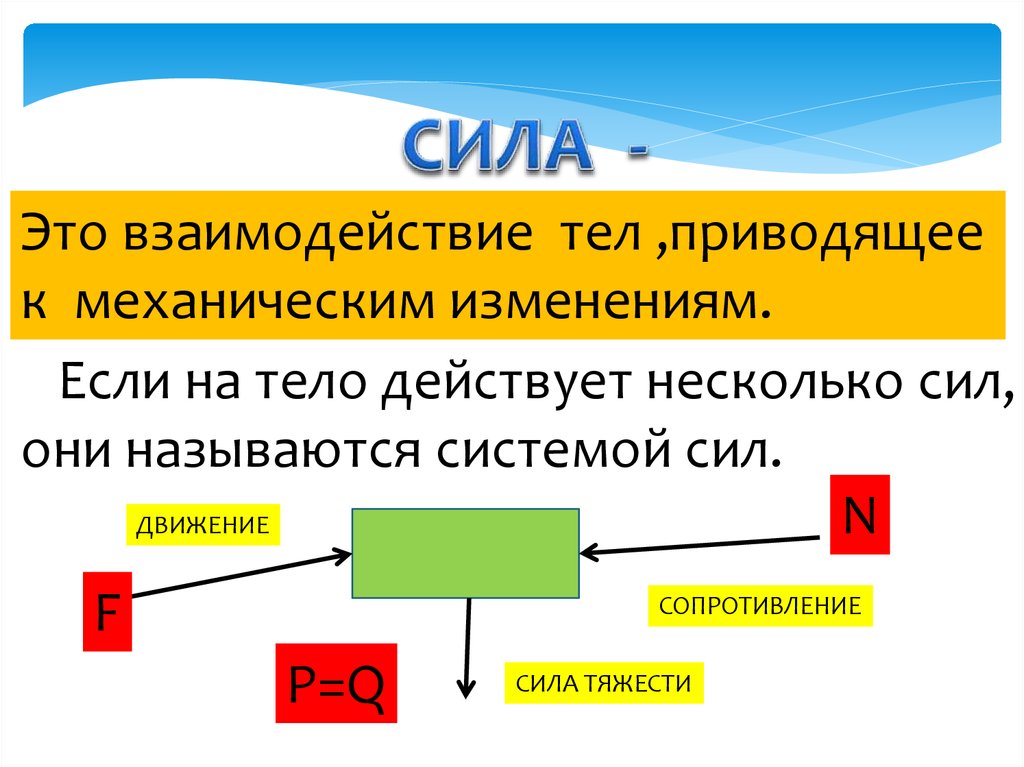
Это взаимодействие тел ,приводящеек механическим изменениям.
Если на тело действует несколько сил,
они называются системой сил.
ДВИЖЕНИЕ
N
F
СОПРОТИВЛЕНИЕ
P=Q
СИЛА ТЯЖЕСТИ
3.
Сила, присоединенная к системе сили приводящая систему к равновесию
называется УРАВНОВЕШЕННОЙ
СИЛОЙ.
4.
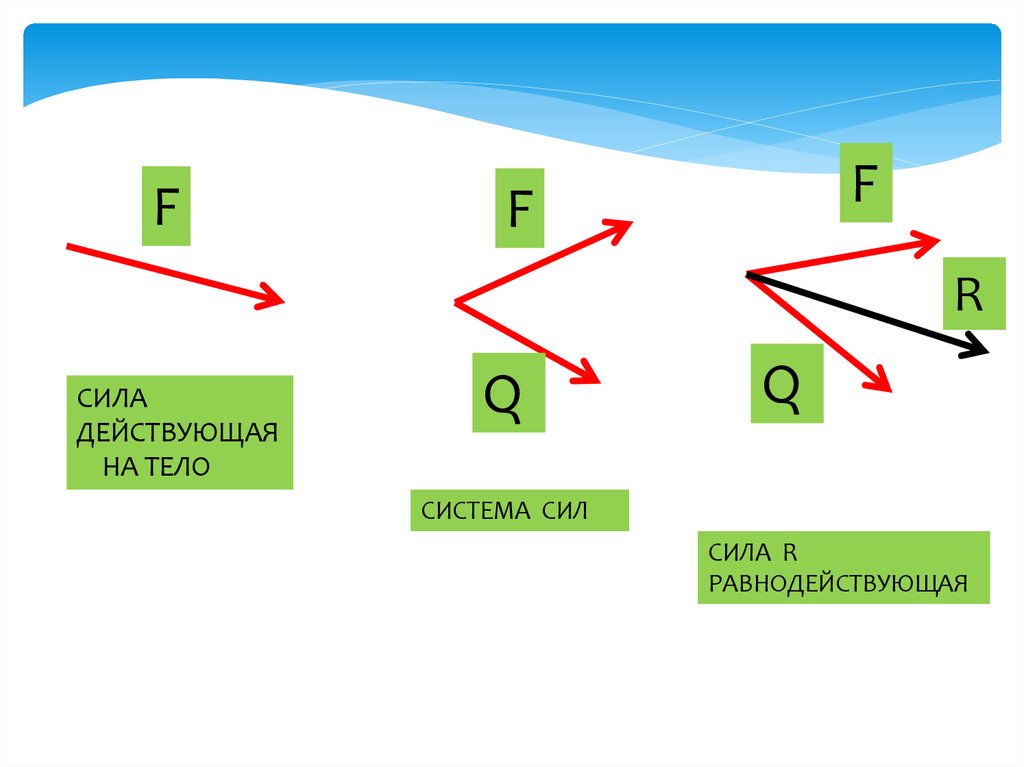
FF
F
R
СИЛА
ДЕЙСТВУЮЩАЯ
НА ТЕЛО
Q
Q
СИСТЕМА СИЛ
СИЛА R
РАВНОДЕЙСТВУЮЩАЯ
5.
Если на тело действует система силпод влиянием которых тело не
изменяет своего движения или
состояния покоя , то такая система
называется УРАВНОВЕШЕННОЙ.
6.
Силы, действующие на телообозначаются вектором.
ВЕТОР – отрезок прямой имеющий
направление.
7.
Проекция –это изображениепространственных фигур на плоскости.
Положение любой точки тела,
определяется координатами или
системой координат. Существует два
типа координат: полярная и
прямоугольная системы. Мы будем
пользоваться прямоугольной.
8.
3Y
В
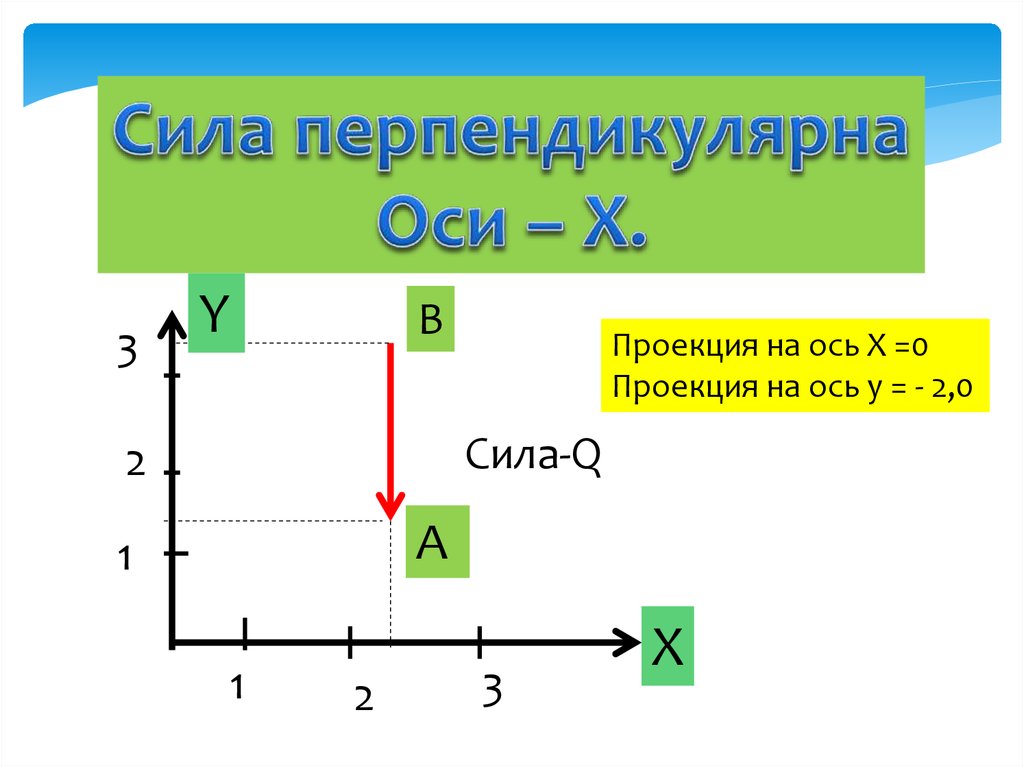
Проекция на ось Х =0
Проекция на ось y = - 2,0
Сила-Q
2
А
1
1
2
3
X
9.
Y3
2
1
C
1
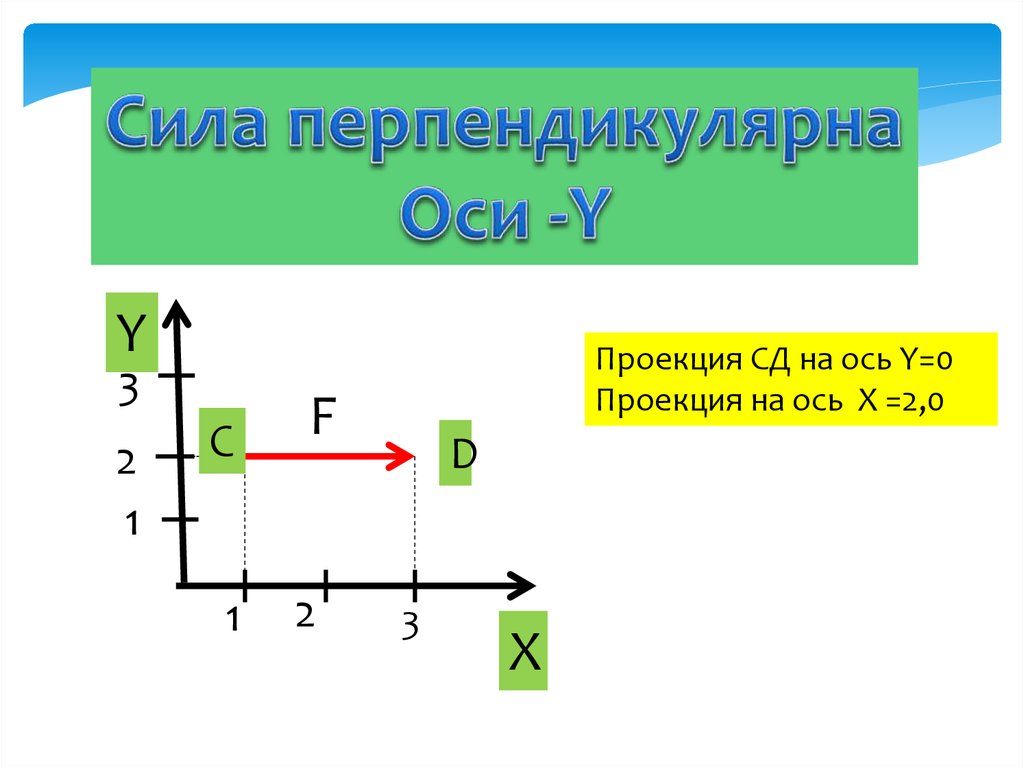
Проекция СД на ось Y=0
Проекция на ось X =2,0
F
2
D
3
X
10.
Y4
3
2
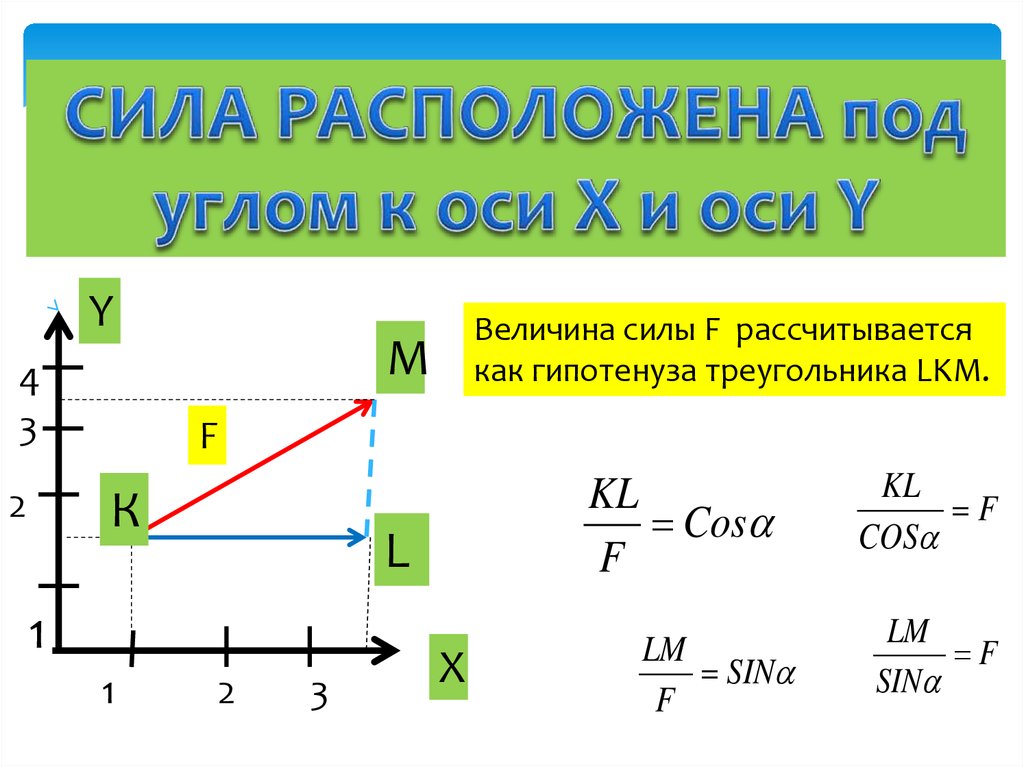
Величина силы F рассчитывается
как гипотенуза треугольника LKM.
M
F
К
L
1
1
KL
Cos
F
2
3
X
LM
SIN
F
KL
F
COS
LM
F
SIN
11.
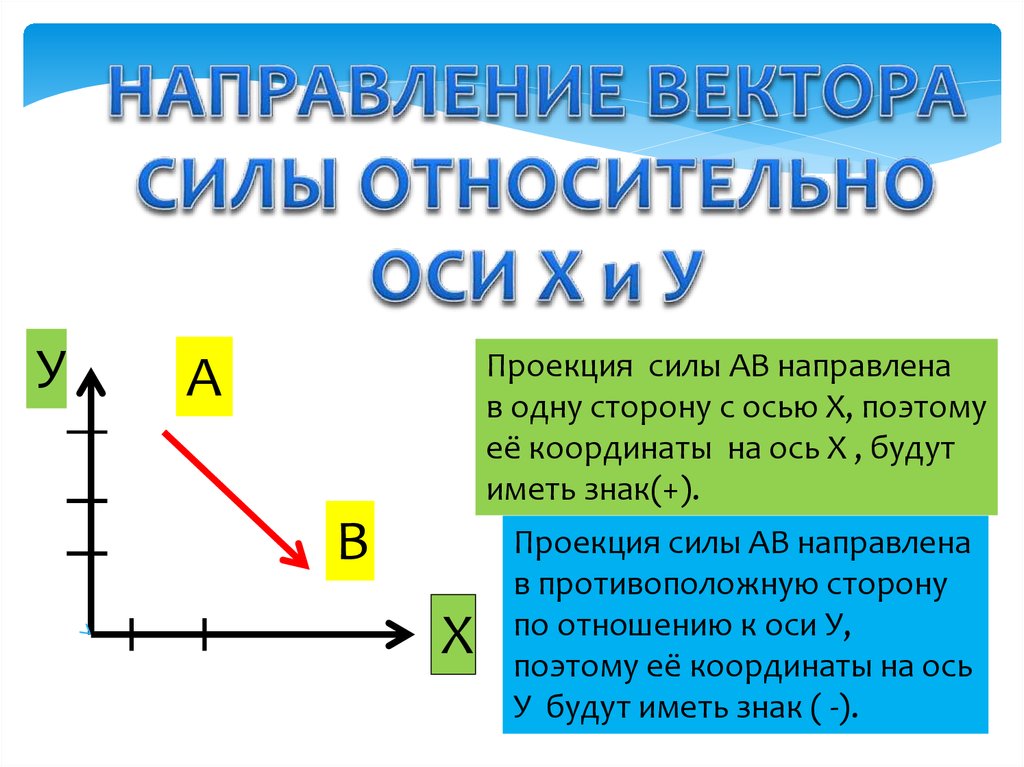
УПроекция силы АВ направлена
в одну сторону с осью Х, поэтому
её координаты на ось Х , будут
иметь знак(+).
А
В
Х
Проекция силы АВ направлена
в противоположную сторону
по отношению к оси У,
поэтому её координаты на ось
У будут иметь знак ( -).