
















 последовательное")
 параллельное соединение")

 обратная связь")








")

")

")

 звено 1 порядка")

 звено 2 порядка")
")















 Математика
МатематикаПохожие презентации:



")






Устойчивость точки покоя. (Лекция 4)
1. Устойчивость точки покоя
1-неустойчивая2-седловая точка
отклонение
3-устойчивая
2. Математические определения устойчивости
3.
4. Точки покоя системы
5. Устойчивость точки покоя
6. Пример расчета
7.
8.
9. Преобразование Лапласа
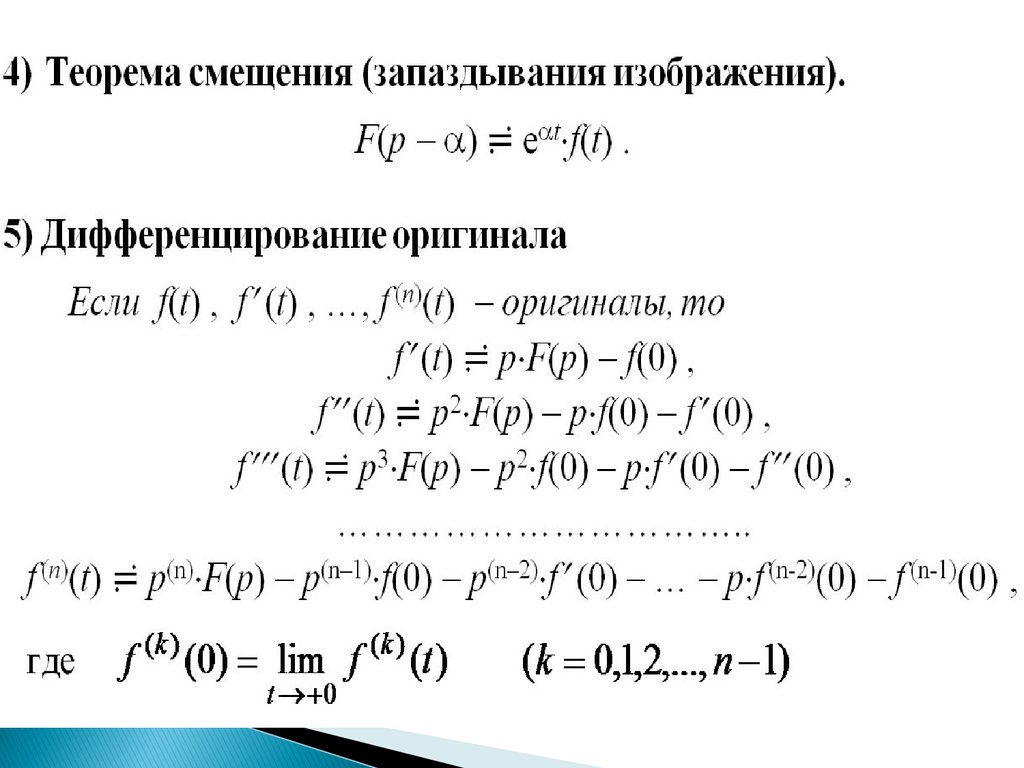
10. Свойства преобразования Лапласа
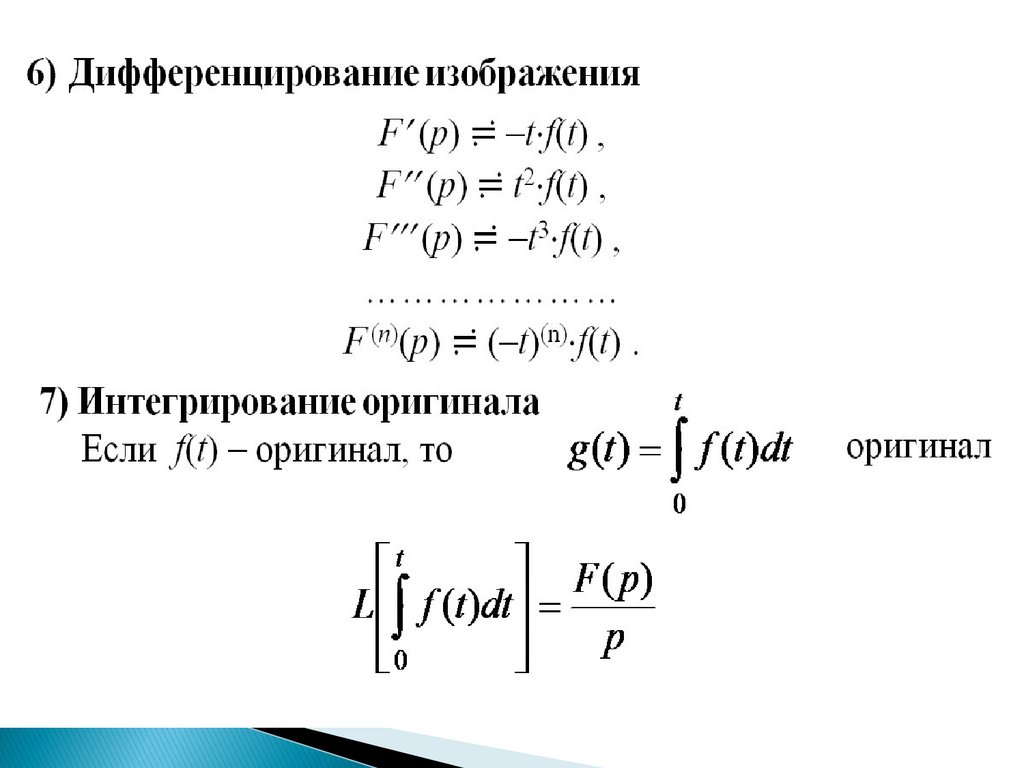
11.
12.
13. Таблица преобразований Лапласа
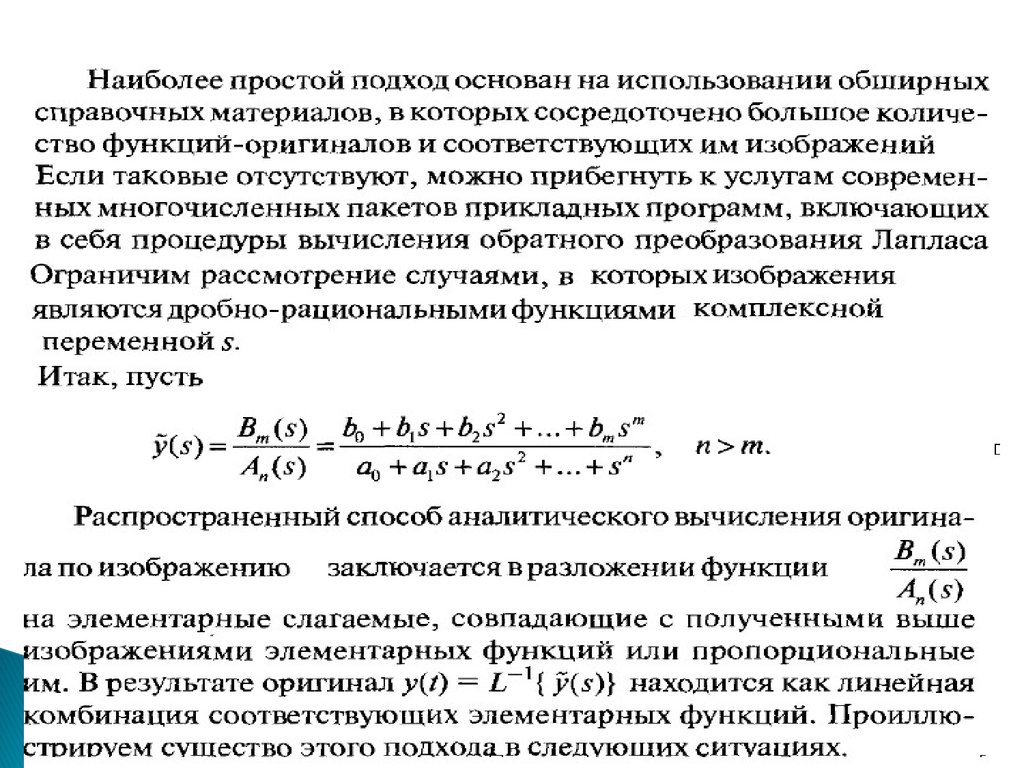
14. Восстановление оригиналов по изображениям
15.
16. Примеры расчетов
17. Примеры расчетов
18. Использование преобразование Лапласа
19. Модель вход-выход
Связь между входным сигналом u(t) и выходным y (t)определяется дифференциальным уравнением, где
an , ... , a0 ; bm , ... , b0 – коэффициенты, зависящие от
параметров системы; n – размерность системы.
an y(n)(t) + an-1 y(n-1) (t) + ... + a0 y (t) = bm u(m) (t) + bm-1 u (m-1) + ... + b0 u (t),
20. Модель вход-выход
21. Передаточная функция системы
22. Структурные соединения звеньев системы а) последовательное
23. а) параллельное соединение
24.
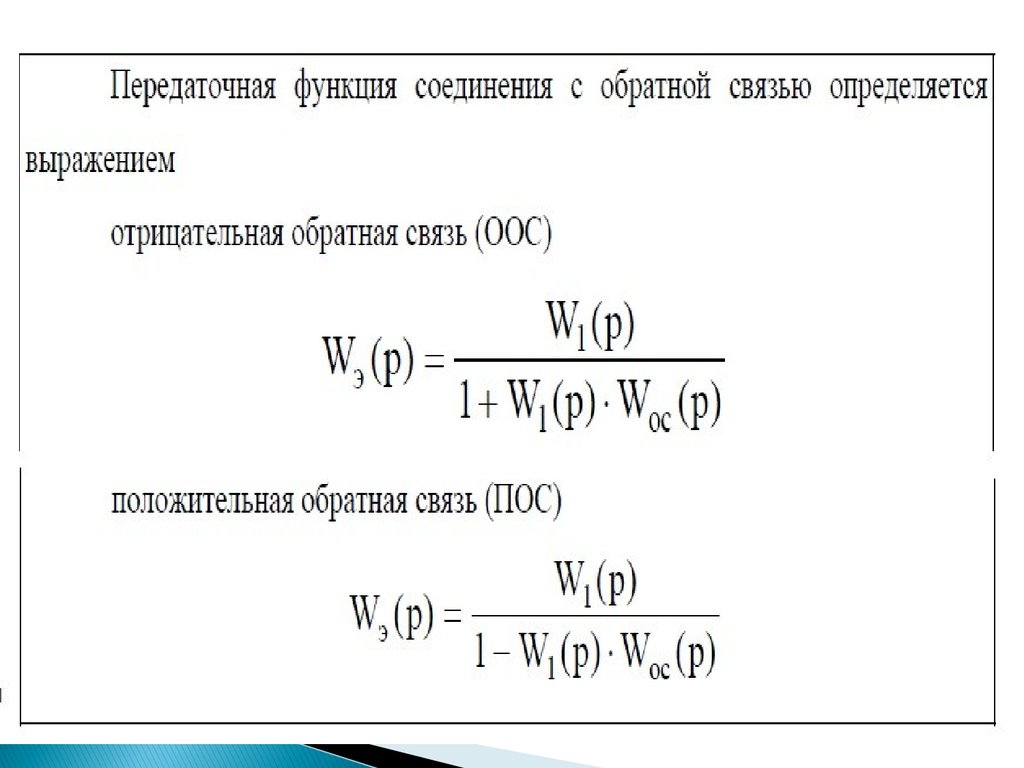
25. в) обратная связь
26.
27. Правила структурных преобразований
28. Пример преобразования
29.
30. Переходная функция системы
31. Импульсная переходная функция
32. Функция Хэвисайда и -функция
33. Исследование систем
34. Схема и типовые воздействия в САУ
35. Алгоритм исследование систем (САУ)
36. Типы основных звеньев
37. Частотные характеристики систем (САУ)
38. Представление частотных ПФ
39. Частотные характеристики отклика систем (САУ)
40. Характеристики звеньев: усилительное безинерционное звено
41. Апериодическое (усилительное инерционное) звено 1 порядка
42. Частотные характеристики
43. Апериодическое ( усилительное инерционное) звено 2 порядка
последовательное соединение двух апериодических звеньев первогопорядка
44. Колебательное звено (вариант предыдущего)
45. Консервативное звено при = 0
46. Интегрирующее звено
∞47. Дифференцирующее звено
48. Примеры использования звеньев на практике
49. Использование программных пакетов при расчете систем управления
Решение дифференциального уравнения50. Преобразование Лапласа
LaplaceTransform[t*Sin[t],t,s]Ответ:
(2 s)/(1+s^2)2
LaplaceTransform[DiracDelta[t],t,s]
Ответ : 1/s
LaplaceTransform[X''[t]-4*X'[t]
+3*X[t],t,s]//TraditionalForm
Ответ :
s2 (Lt[X(t)](s))+3 (Lt[X(t)](s))-4 (s (Lt[X(t)](s))-
X(0))-s X(0)-X¢(0)
51. Использование преобразования Лапласа для построения передаточной функции
52. Нахождение передаточной функции для общей модели состояний системы
53. Пример:получение стандартной модели из ДУ
Одно уравнение x''[t]+A x'[t]+B x[t]=u[t] второгопорядка эквивалентно системе из 2 уравнений первого
порядка
x'[t]=z[t]
z'[t]=-A x'[t]- B x[t]+u[t]
Получение стандартной модели состояний системы в
Математика 9
54. Пример:получение передаточной функции из модели состояний системы
55. Нахождение переходной функции
Входное воздействие l(t)-UnitStep[t]Выходная реакция-
(функция
переходная функция
1 .0
Хэвисайда)
0 .8
0 .8
0 .6
0 .6
0 .4
0 .4
0 .2
0 .2
5
10
15
20
2
4
6
8
10
56. Нахождение импульсной переходной функции
Входное воздействие (t)-DiracDelta[t]Выходная реакцияимпульсная функция
1 .0
0 .1 5
0 .5
0 .1 0
0 .2
0 .4
0 .6
0 .8
1 .0
0 .0 5
0 .5
1 .0
2
4
6
8
10
57. Нахождение отклика системы на гармоническое воздействие
Входное воздействие Sin[4 t]Выходная реакциягармонический отклик
1 .0
0 .0 6
0 .5
0 .0 4
2
4
6
8
10
0 .0 2
0 .5
2
1 .0
4
6
8
10
58. Устойчивость системы -Найквист
один из способов судить об устойчивости замкнутой системыуправления по АФЧХ её разомкнутого состояния.
Если разомкнутая система с передаточной функцией устойчива, замкнутая
система является устойчивой, если АФЧХ разомкнутой системы не
охватывает точку (−1; j0).