



 Математика
Математика Электроника
ЭлектроникаПохожие презентации:










Линейная модель САР. Устойчивость линейных систем
1.
РАДИОАВТОМАТИКАЛекция 3
ЛИНЕЙНАЯ МОДЕЛЬ САР.
УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ
СИСТЕМ
2. ЛИНЕЙНАЯ МОДЕЛЬ СИСТЕМЫ АПЧГ
Структурная схема системы АПЧГfвх
См
fпчсм
УПЧ
fпч
ЧД
Uчд
ФНЧ
Uфнч
УПТ
Uу
fпг
ПГ
При составлении линейной модели нужно: 1) все нелинейные функциональные
зависимости заменить линейными и 2) учесть динамические свойства элементов.
Считаем, что выходной и входной процессы элементов связаны между собой так
же, как выходное и входное напряжения интегрирующей цепи. Ее передаточная
1
функция К(р) =
1+Тр
3.
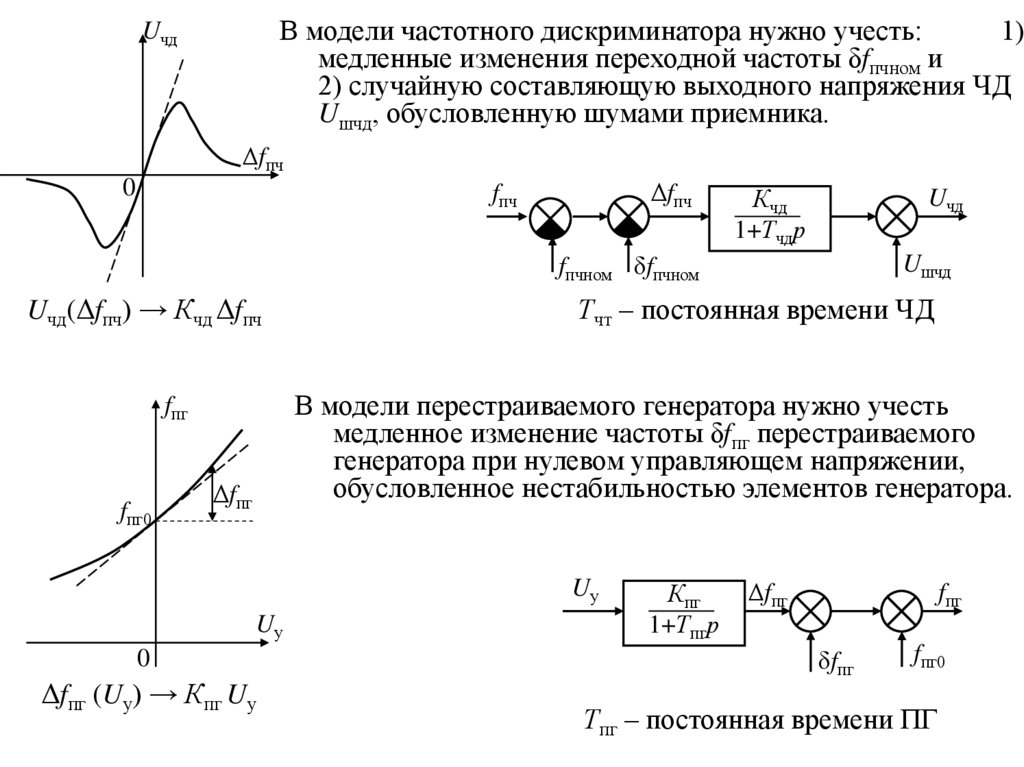
В модели частотного дискриминатора нужно учесть:1)
медленные изменения переходной частоты δfпчном и
2) случайную составляющую выходного напряжения ЧД
Uшчд, обусловленную шумами приемника.
Uчд
Δfпч
0
Δfпч
fпч
Кчд
1+Тчдр
Uчд
fпчном δfпчном
Uчд(Δfпч) → Кчд Δfпч
Тчт – постоянная времени ЧД
В модели перестраиваемого генератора нужно учесть
медленное изменение частоты δfпг перестраиваемого
генератора при нулевом управляющем напряжении,
обусловленное нестабильностью элементов генератора.
fпг
fпг0
Uшчд
Δfпг
Uу
Uу
0
Δfпг (Uу) → Кпг Uу
Кпг
1+Тпгр
Δfпг
fпг
δfпг
fпг0
Тпг – постоянная времени ПГ
4.
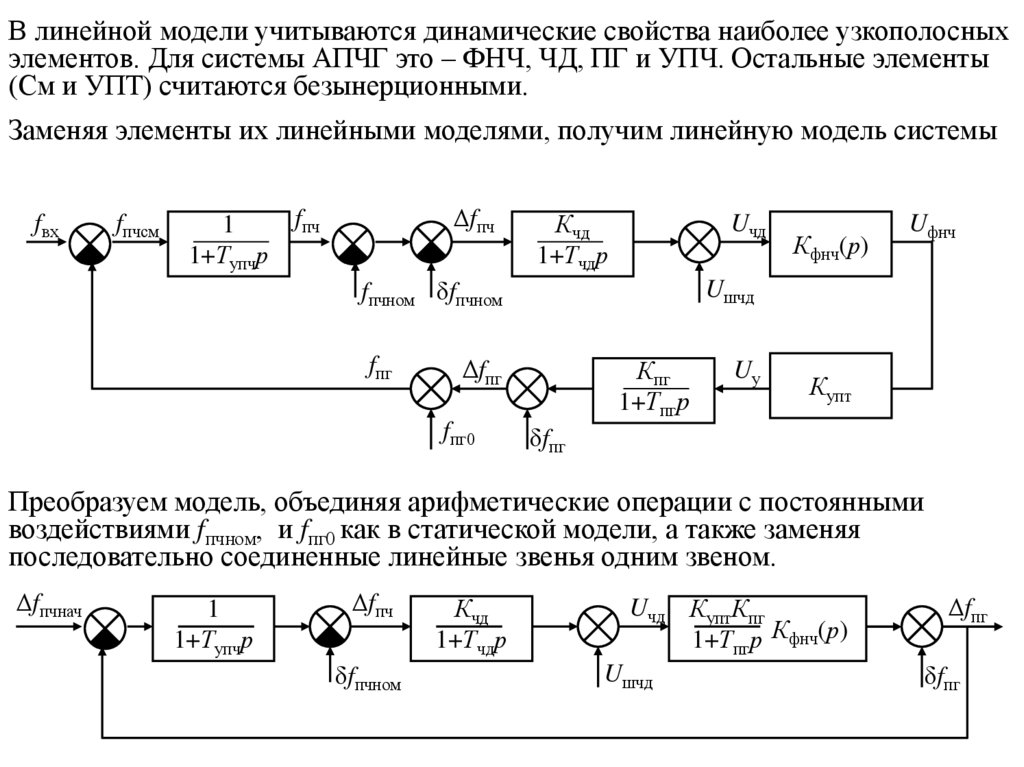
В линейной модели учитываются динамические свойства наиболее узкополосныхэлементов. Для системы АПЧГ это – ФНЧ, ЧД, ПГ и УПЧ. Остальные элементы
(См и УПТ) считаются безынерционными.
Заменяя элементы их линейными моделями, получим линейную модель системы
fвх
fпчсм
1
1+Тупчр
Δfпч
fпч
Кчд
1+Тчдр
Uчд
fпчном δfпчном
fпг
Uшчд
Δfпг
fпг0
Кфнч(р)
Uфнч
Кпг
1+Тпгр
Uу
Купт
δfпг
Преобразуем модель, объединяя арифметические операции с постоянными
воздействиями fпчном, и fпг0 как в статической модели, а также заменяя
последовательно соединенные линейные звенья одним звеном.
Δfпчнач
1
1+Тупчр
Δfпч
δfпчном
Кчд
1+Тчдр
Uчд КуптКпг
1+Тпгр Кфнч(р)
Uшчд
Δfпг
δfпг
5. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОРЕГУЛИРОВАНИЯ
xз(t)u(t)
К1(р)
v(t)
К2(р)
xв(t)
y(t)
Воздействия:
xз(t) – задающее,
xв(t) – возмущающее
Y(p)
Передаточная функция замкнутой системы Кз(р) = X (p)
з
Y(p)
Y(p)
Передаточная функция разомкнутой системы Кр(р) =
при разомкнутой ОС =
Xз(p)
U(p)
Y(p)
Передаточная функция по возмущению Кв(р) =
Xв(p)
U(p)
Передаточная функция ошибки Кош(р) =
Xз(p)
Y(p) = K2(p)V(p) =K2(p){K1(p)U(p) + Xв(p)} = K2(p){K1(p)[Xз(p) – Y(p)] + Xв(p)}
K1(p)K2(p)
K2(p)
Y(p) = 1 + K (p)K (p) Xз(p) + 1 + K (p)K (p) Xв(p)
1
2
1
2
Kр (p) = K1 (p) K2 (p)
Kр(p)
K2(p)
1
Kз(p) = 1 + K (p)
Kв(p) = 1 + K (p)
Kош(p) = 1 + K (p)
р
р
р
Правило составления передаточных функций: В знаменателе передаточной функции стоит
выражение 1 + Кр(р), а в числителе – передаточная функция элементов, находящихся между
точкой съема выходного процесса и точкой подачи входного воздействия
6. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ
Линейная система устойчива, если при ограниченномвходном воздействии x(t) выходной процесс y(t) тоже
ограничен
x(t) Линейная y(t)
система
d n y (t )
d n 1 y(t )
d m x(t )
d m 1 x(t )
an
an 1
a0 y (t ) bm
bm 1
b0 x(t ).
dt n
dt n 1
dt m
dt m 1
Решение: y(t) =yсв(t) + yприн(t) ограничено, если ограничена yсв(t), которая
является решением однородного дифференциального уравнения
d n y (t )
d n 1 y (t )
an
an 1
a0 y (t ) 0.
dt n
dt n 1
Решение: yсв (t )
an
pn +
an-1
pn-1
n
C e
i 1
+ an-2
pi t
i
pn-2
, где pi – корни характеристического уравнения:
+ … + a0 = 0
Для неустойчивой системы
yсвi(t)
lim yсв (t )
t
Линейная система устойчива, если все
корни характеристического уравнения
находятся в левой полуплоскости.
Ci
0
pi > 0
pi = 0
pi < 0
t
7. КРИТЕРИИ УСТОЙЧИВОСТИ
На практике определение устойчивости по корням характеристического уравненияпроизводится крайне редко. Обычно пользуются критериями устойчивости.
Напомним связь характеристического уравнения с другими математическими
описаниями линейных систем.
Возьмем преобразование Лапласа от дифференциального уравнения
d n y (t )
d n 1 y(t )
d m x(t )
d m 1 x(t )
an
an 1
a0 y (t ) bm
bm 1
b0 x(t ).
n
n 1
m
m 1
dt
dt
dt
dt
(anpn + an – 1pn – 1 + … + a0)Y(p) = (bmpm + bm – 1pm – 1 + … + b0) X(p)
Y(p)
bmpm + bm – 1pm – 1 +…+ b0
Передаточная функция K(p) =
=
X(p)
anpn + an – 1pn – 1+… + a0
Знаменатель передаточной функции (характеристический полином) совпадает с
левой частью характеристического уравнения.
bm( jω)m + bm – 1(jω)m – 1 + b0
Комплексная частотная характеристика K(jω) =
an(jω)n + an – 1(jω)n – 1 + a0
Устойчивость линейной системы определяется знаменателем
передаточной функции или комплексной частотной характеристики
Используются два типа критериев: алгебраические (Рауса-Гурвица),
определяющие устойчивость по коэффициентам ai характеристического
полинома, и частотные (Михайлова и Найквиста) , в основу которых положено
исследование аргумента частотного характеристического полинома.