



 Электроника
ЭлектроникаПохожие презентации:





")




Радиомаячные системы посадки сантиметрового диапазона волн (РМСП СМВ (MLS)
1.
Радиомаячные системыпосадки сантиметрового
диапазона волн
(РМСП СМВ (MLS)
КАФЕДРА №12
2.
Общая характеристикаРМСП СМВ (MLS) – это радиомаячная система захода на посадку сантиметрового
диапазона, представляющая собой совокупность наземных и бортовых
радиотехнических устройств, работающих на одном из частотных каналов, с
разделением радиосигналов по времени.
Узкий спектр наведения ILS
Широкий спектр наведения
MLS
3.
Функции РМСП СМВ- получение на борту ВС и выдачу экипажу и в САУ информации об
угловых отклонениях ВС от заданной траектории посадки в вертикальной
(угол места) и горизонтальной (азимутальный угол) плоскостях;
- измерение дальности до расчетной точки приземления;
- передача на борт ВС разнообразной дополнительной информации.
4.
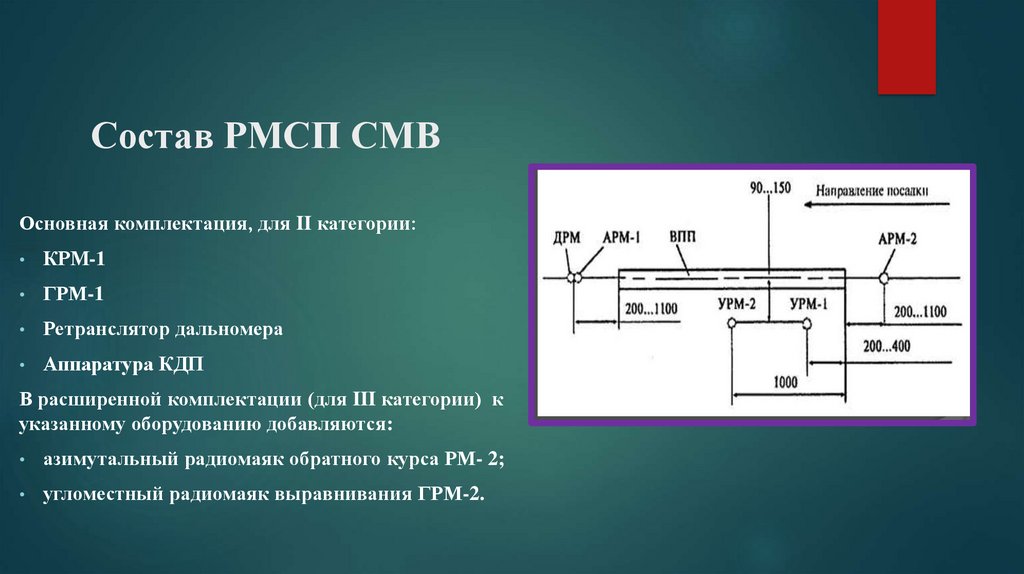
Состав РМСП СМВОсновная комплектация, для II категории:
КРМ-1
ГРМ-1
Ретранслятор дальномера
Аппаратура КДП
В расширенной комплектации (для III категории) к
указанному оборудованию добавляются:
азимутальный радиомаяк обратного курса РМ- 2;
угломестный радиомаяк выравнивания ГРМ-2.
5.
Структурная схемаКРМ-1
КРМ-2
β
АУРП
ВУ
ИАУ
θ
ГРМ-1
ГРМ-2
РД
ПСП
САУ
Z=r1sinθ
H=r0 sinβ
r
ЗД
Для определения координат Z и H на борт ВС
передаются:
• Данные о длине ВПП
• Информация о расположении каждого РМ
относительно ВПП
ИД
АУРП – азимутальноугломерный
радиоприемник
ИАУ – измеритель
азимутального угла и угла
места
ЗД – запросчик дальности
ВУ –вычислительное
устройство
ИД – измеритель
дальности
r-дальность
Θ - азимутальный угол
Β – угол места
6.
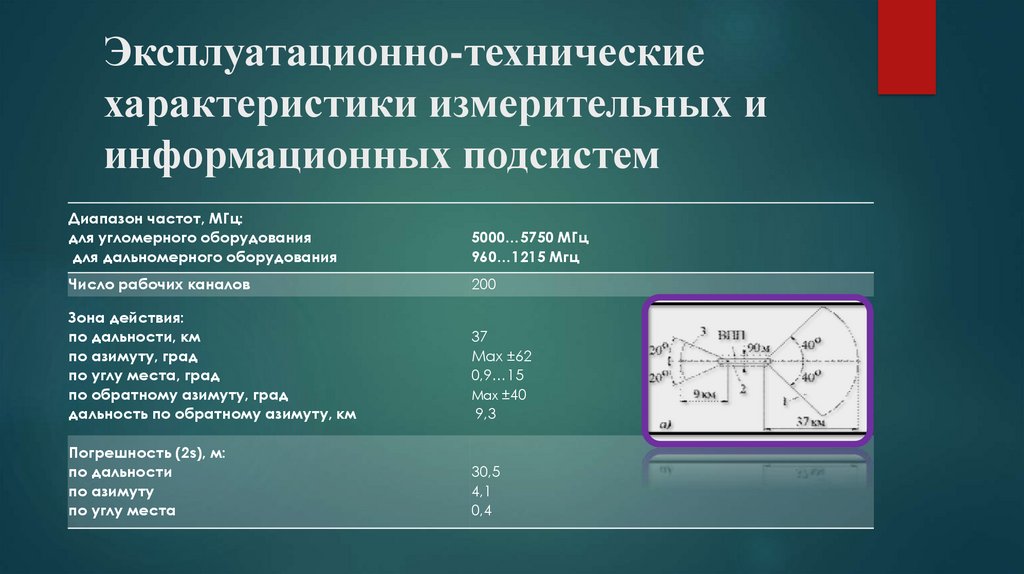
Эксплуатационно-техническиехарактеристики измерительных и
информационных подсистем
Диапазон частот, МГц:
для угломерного оборудования
для дальномерного оборудования
5000…5750 МГц
960…1215 Мгц
Число рабочих каналов
200
Зона действия:
по дальности, км
по азимуту, град
по углу места, град
по обратному азимуту, град
дальность по обратному азимуту, км
37
Max ±62
0,9…15
Max ±40
9,3
Погрешность (2s), м:
по дальности
по азимуту
по углу места
30,5
4,1
0,4
7.
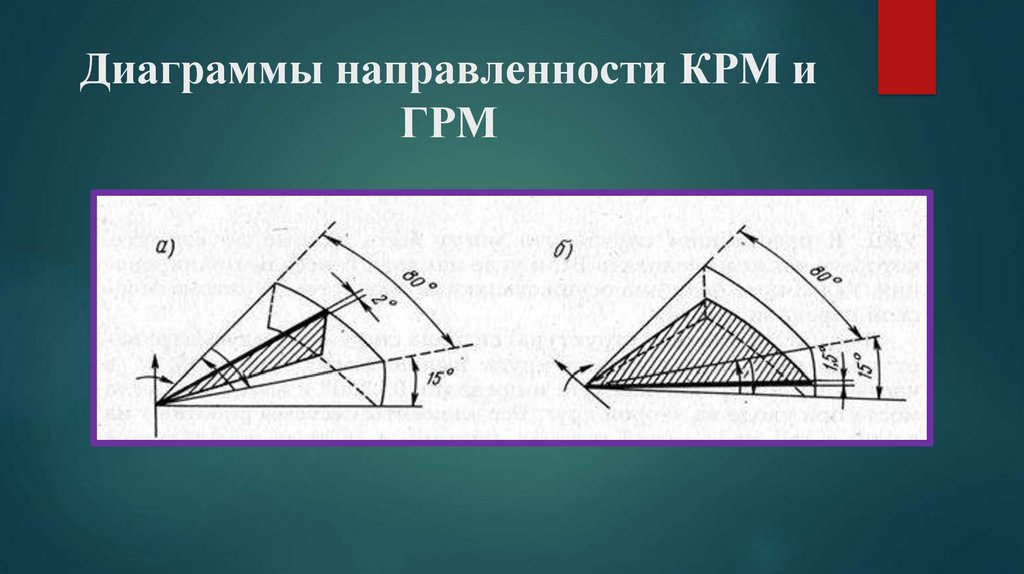
Диаграммы направленности КРМ иГРМ
8.
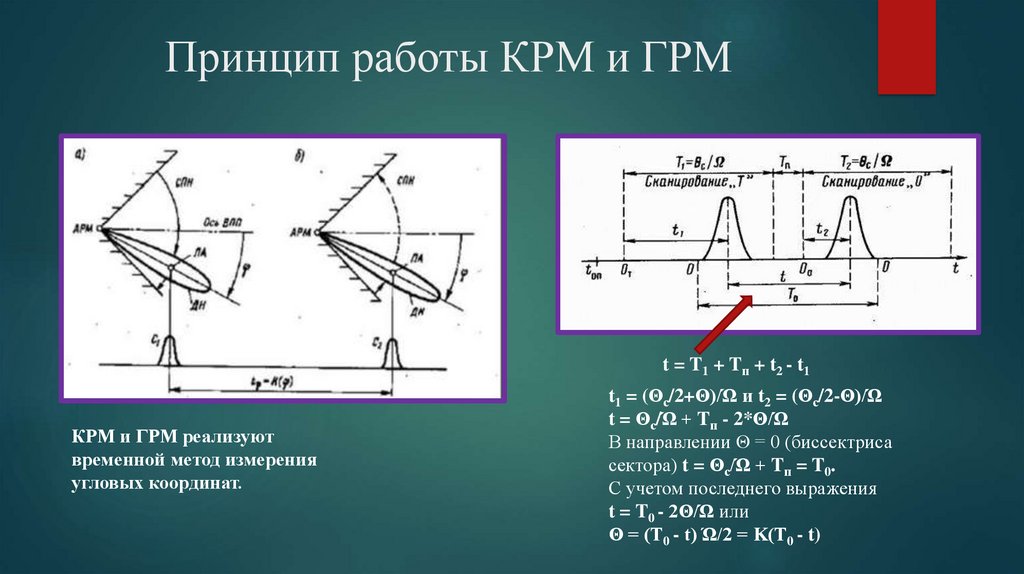
Принцип работы КРМ и ГРМt = T1 + Tп + t2 - t1
КРМ и ГРМ реализуют
временной метод измерения
угловых координат.
t1 = (Θс/2+Θ)/Ώ и t2 = (Θс/2-Θ)/Ώ
t = Θс/Ώ + Tп - 2*Θ/Ώ
В направлении Θ = 0 (биссектриса
сектора) t = Θс/Ώ + Tп = T0.
С учетом последнего выражения
t = T0 - 2Θ/Ώ или
Θ = (T0 - t) Ώ/2 = K(T0 - t)
9.
Передаваемая информацияВ качестве основных данных передается
следующая информация:
- расстояние от антенны КРМ 1 до
порога ВПП;
- границы зоны пропорционального
наведения по азимуту;
- ширина луча ДНА;
- расстояние от ГРМ-1 до порога ВПП;
- расстояние от антенны РД до порога
ВПП;
- минимальный угол наклона глиссады;
- высота угломестной антенны и ее
смещение.
К вспомогательным данным относятся:
- информация о размещении наземного
оборудования;
- информация о состоянии ВПП;
- метеорологическая информация и др.
10.
Преимущества MLS• Более точное определение пространственного положения
ВС
• Значительно меньшее влияние рельефа местности на
точность системы
• Возможность решения ряда дополнительных задач
процедур захода на посадку и посадки
• Большое число частотных каналов, как следствие –
увеличение пропускной способности ВП
• Экономия топлива
• Уменьшение уровня шума